城市轨道交通车辆防滑保护控制技术
2024-02-22张兴旺刘佳玲闫晓庚
张兴旺 刘佳玲 闫晓庚 刘 政
(中车唐山机车车辆有限公司产品研发中心,063035,唐山)
随着我国城市化进程的加快,城市轨道交通(以下简称“城轨”)依靠其准点运行、快捷可靠等特点,逐渐成为市民出行的首选公共交通方式。城轨车辆运行站间距短,起动加速度和制动减速度较大[1],对轮轨黏着的要求比较严苛。
目前,城轨车辆的制动仍以黏着制动为主。对于黏着制动而言,在制动过程中会不可避免地带来车轮滑行的问题。目前,城轨的发展方向主要为列车运行速度更高,运行线路由地下转向地面、高架等。在这种发展大背景下,当遇上雨雪天气,轨道表面的可利用黏着力有所降低,列车在制动时的车轮滑行几率将会进一步有所增大。这不仅会大大延长列车制动距离,更为严重的是,若制动力过大会导致车轮抱死,造成车轮踏面擦伤,引起车辆振动或蛇行运动现象,危及行车安全[2]。
针对城市轨道交通车辆的特点,本文从防滑保护控制原理的角度出发,介绍了目前城市轨道交通车辆电制动防滑与空气制动防滑的控制原理,对电制动和空气制动的防滑控制策略进行了优化。本文研究可为不同线路的城市轨道交通车辆防滑控制设计提供借鉴。
1 黏着理论介绍
当城轨车辆在钢轨上运动时,在车轮载重G的作用下,轮轨接触部位会产生弹性变形,形成椭圆形的接触区。轮轨接触面的两侧部分产生相对运动,车轮相对于轨道出现轻微的滑动,称为蠕滑。在轮轨接触区的前部为黏附区,后部为滑动区。
当车轮沿轨道滚动时,轮轨接触处既非静止也非滑动,而是静中有微动或滚中有微滑的状态。在接触面出现切向相对运动的情况下,车辆才能施加制动力。将沿车纵向传递的制动力与法向力之比定义为黏着系数。这种在轮轨间接触部分伴随蠕动所传递的力即称为黏着力F[3]。轮轨黏着状态及受力示意图如图1所示。
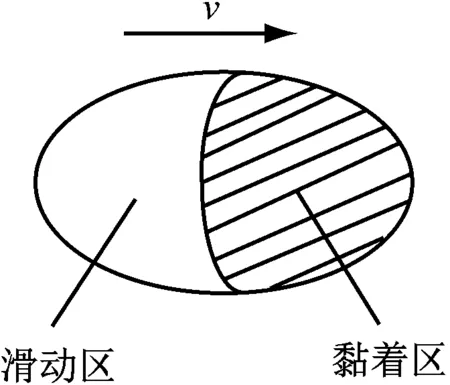
a) 轮轨黏着状态
当列车在运行过程中施加制动时,车轮上所施加的制动力矩会产生切向力,并随着蠕滑率的增加而增加,通常在此状态的力为可利用的黏着力。在某一蠕滑率下,切向力达到最大值,此后蠕滑率随着制动力矩的增加而急剧增加,黏着系数急剧降低,导致制动时车轮打滑。轮轨间的黏着系数随着蠕滑率的增大而增大,当蠕滑率达到一定值时,黏着系数具有最大值,此后黏着系数随着蠕滑率的增加而急剧下降[4]。
2 防滑控制介绍
城轨车辆多采用动力分散模式,黏着利用率高。对于电制动方式,动力分散模式对于制动黏着的利用是有利的。对于空气制动方式,由于基础制动装置本来就分布在各转向架上,在黏着问题上的主要矛盾是考虑高速行车和不良轨面状态下黏着系数的降低问题。
因此对于城轨车辆而言,无论是电制动还是空气制动,按照黏着特性来控制制动力是极为重要的。如果黏着力控制不当,就会在黏着力低于制动力时发生滑行现象。因此,城轨车辆需配备防滑保护系统进行防滑控制。
2.1 黏着利用控制
由黏着理论可知,黏着系数随蠕滑率的增加变化曲线是存在拐点的,若能将蠕滑率保持在拐点附近,就能获得较大的黏着系数。文献[5]的研究结果表明,当车轮滑行时,采用控制蠕滑率的防滑控制方法,将蠕滑率控制在10%~20%的范围,这样不仅能在低黏着条件下获得较高的黏着系数,还有一定的踏面清扫作用,起到改善和提高黏着系数的作用。
对于黏着利用的控制,主要从以下方面考虑:
1) 尽早判别滑行极限值的出现时机,可靠地避免滑行现象。在出现诸如轨面状态变化的情况下,应当要求制动力迅速自动与之相适应,保证在列车制动运行中,始终以最大黏着力工作而不超过黏着极限值。
2) 在列车制动运行过程中,应充分利用黏着力,但不超过黏着最大值,防止进入黏着特性的不稳定区域。
3) 尽可能减少车轮和钢轨的摩擦,特别需要防止出现车轮与机车构架之间产生颤振现象而损坏转向架设备。
制动防滑控制系统是确保行车安全的重要部件,其能防止城轨车辆在制动过程中发生滑行,使车辆在制动过程中达到最佳利用黏着。
2.2 防滑系统组成
城轨车辆在运行过程中多采用电制动和空气制动混合的方式完成制动过程。电制动和空气制动的防滑控制分别由牵引控制单元和制动控制单元完成。电制动的防滑系统采用车控方式,主要通过牵引控制单元检测电机转速,同时综合列车的运行速度进行车辆滑行的判断与防滑控制[6]。
空气制动防滑保护系统采用轴控控制方式,包括测速齿轮、速度传感器、防滑电子控制单元和防滑阀等。防滑电子控制单元和防滑阀均集成于制动控制单元,通过安装于每根轴上的速度传感器来监控轴速,轴速信息共享于制动网络单元内的各制动控制单元。空气制动防滑保护系统组成示意图如图2所示。
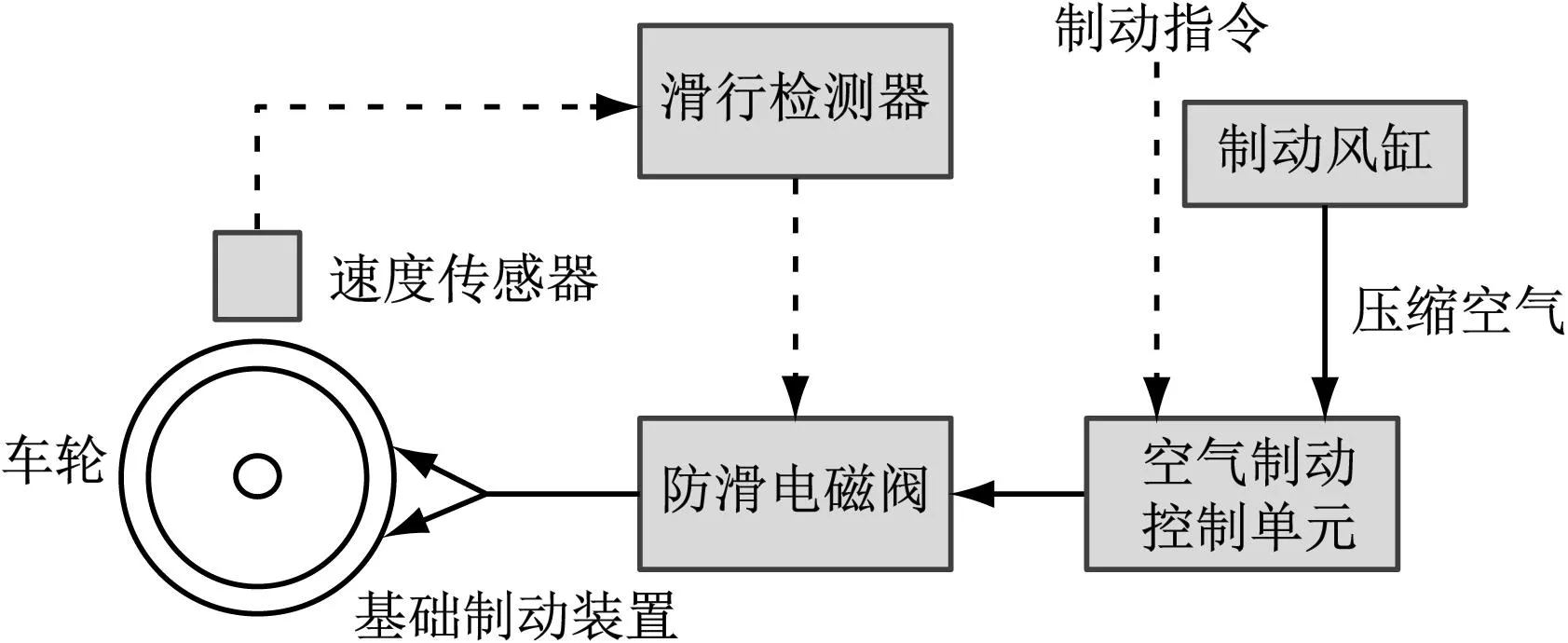
图2 空气制动防滑保护系统组成示意图
2.3 防滑控制分类
当列车运行线路轮轨黏着条件不佳时,车辆在制动工况下的制动力超过车轮与钢轨间的黏着力后,列车轮对与钢轨之间会处于滑行状态。当城轨车辆检测到滑行状态后,防滑保护系统会自动进行防滑保护控制。防滑保护控制的主要目标是通过降低制动力来匹配轨道能够提供的黏着力,减少或避免有可能进一步恶化而导致车轮踏面的擦伤。
2.3.1 电制动防滑控制
在电制动工况下,牵引控制单元的黏着利用控制系统通过对电机速度、电机转矩等信息的实时采集、分析和处理,结合由车辆网络系统给出的电机转矩指令和控制单元生成的制动特性包络线,综合得出电机转矩指令,向电机控制系统发出合适的电机转矩给定值,使得城轨车辆能利用当前线路的轮轨间最大黏着系数运行,从而获得最大黏着利用率。
当车辆制动发生滑行,黏着利用控制系统通过轮对减速度、蠕滑速度等信号进行电制动滑行判断,并快速实时地控制调整电机转矩指令,降低电制动力,以抑制轮对滑行。通过蠕滑控制,牵引控制单元将电制动力动态地控制在最大黏着力附近。电制动防滑控制结构示意图如图3所示。在电制动防滑控制过程中,若输出力小于给定力超过设定时间,则认定电制动的控制失效并切除电制动力。

图3 电制动防滑控制结构示意图
2.3.2 空气制动防滑控制
在空气制动工况下,空气制动系统控制单元通过安装于每根车轴上的速度传感器来监控轴速。根据车辆网络系统给出的制动指令,结合外部空气弹簧的压力信息,由载荷控制单元负责当前载荷下的最大制动力输出。制动控制板控制下游气动阀动作,对制动压力进行快速调节,最终输出对应不同载重的制动缸压力,以保证在充分利用轮轨黏着条件下发挥最大的制动力。
当车辆制动发生滑行,制动控制板主要以蠕滑速度和减速度为判据进行滑行检测,控制板快速地作用于充气阀和排气阀,通过排气阀和充气阀的循环排气、保压和充气过程来调节制动缸压力,校正该车轴的轮对滑行,从而达到防滑保护作用[2]。空气制动防滑控制结构示意图如图4所示。在空气制动防滑控制过程中,若长时间排气或保持不动作超过设定时间,则认定空气制动的控制失效,并退出防滑控制模式。
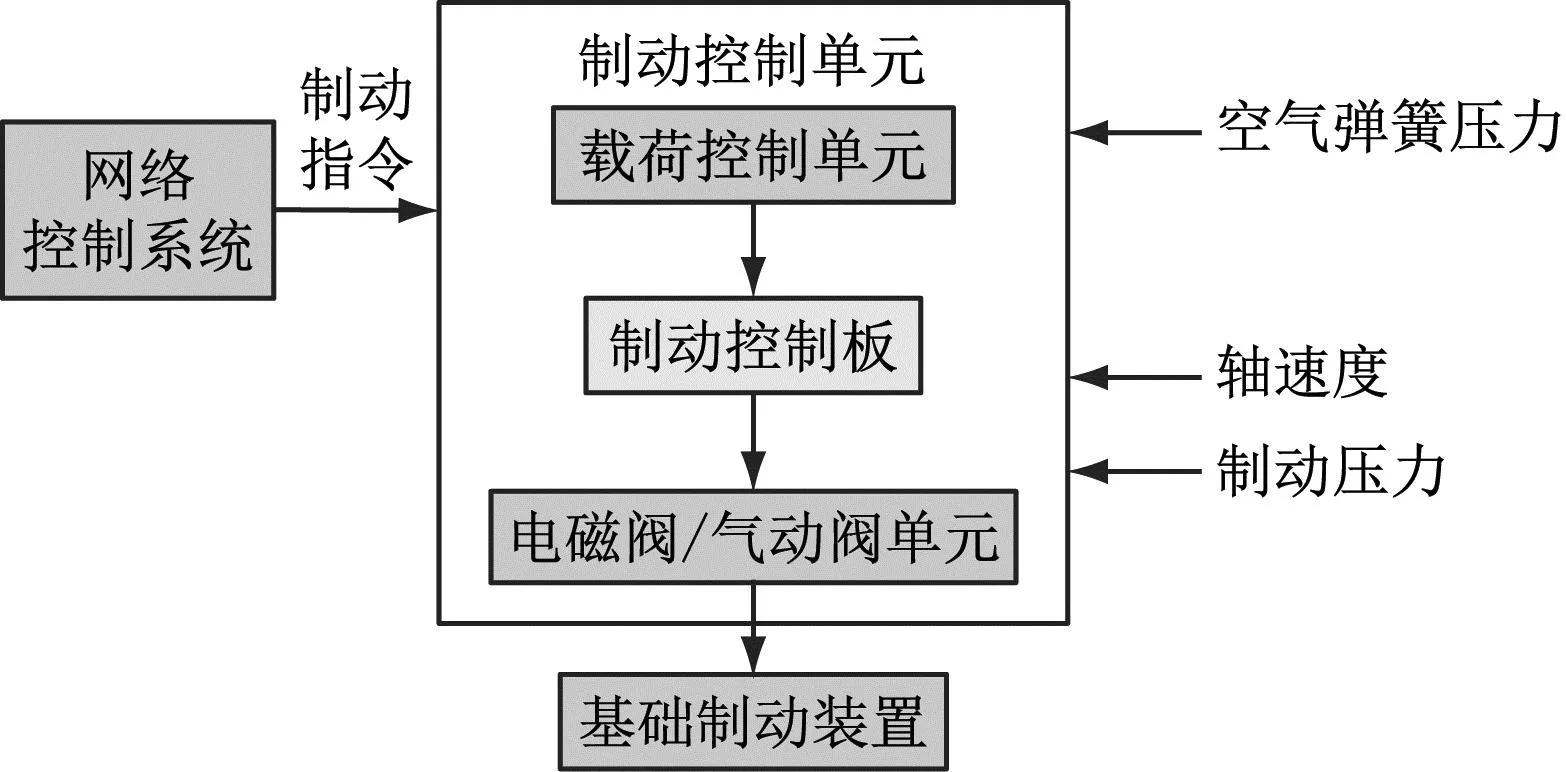
图4 空气制动防滑控制结构示意图
2.3.3 电空混合制动防滑控制
城轨车辆优先使用动车上的电制动力作为主要的制动力,当电制动力不能满足列车制动需求的情况下,空气制动力将进行补充。防滑控制设计主要依据的标准是UIC 541-05:2016《车轮滑行保护装置》,其中主要对自动式空气制动防滑控制器的功能进行了定义,而对于城轨车辆的电空混合制动防滑控制并没有明确规定。
目前,城轨车辆电空混合制动的防滑控制逻辑是通过不断的试验验证逐渐固化的。当电空混合制动时,动车的防滑主要是电制动防滑。当牵引系统检测到电制动滑行时,将电制动滑行信息发送给空气制动系统。空气制动系统会锁定当前的电制动力,以防止电制动在进行防滑控制时空气制动的自动补充,这样可以有利于动车轴的黏着恢复,避免制动滑行加重。若电制动滑行信号持续超过2~4 s,默认电制动防滑控制失效,则将切除电制动而投入空气制动,由空气制动实施防滑控制,以保证制动距离和防止轮对擦伤。拖车车轴则通过正常的空气制动方式进行防滑控制。电空混合制动防滑控制结构示意图如图5所示。
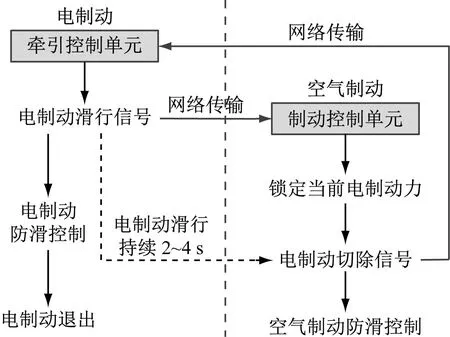
图5 电空混合制动防滑控制结构示意图
根据黏着利用理论,从制动力分配的角度考虑,当检测到电制动滑行时可优先将空气制动分配在拖车上,从而充分利用拖车的黏着作用。这样既能减少后期动车上一旦有空气制动时对电制动滑行控制带来的影响,也可以避免由于空气制动的补充造成的动车滑行,降低滑行概率。
以地铁列车4节编组(两动两拖)为例,在运行过程中列车处于制动工况时,正常状态下,当电制动力总和不能满足整车所需的总制动力时,剩余制动力由空气制动力进行补充,空气制动力平均分配到每辆车上直到两辆动车的制动力达到轮轨间的黏着极限。如果在制动过程中,一辆动车施加电制动力时发生滑行,并且防滑控制失效后,该辆动车的电制动力被切除,此时该辆动车会被视为拖车处理,切除电制动力后损失的制动力由空气制动力进行补充,且空气制动力平均分配到其他三辆拖车上。
3 轮轴抱死介绍
目前,我国城轨车辆空气制动系统控制单元的防滑阀多采用高速通断电磁阀,控制单轴防滑排气(从100%制动缸压力至37%制动缸压力)时间约为270~400 ms,响应时间迅速。当列车运行速度大于30 km/h的列车不会出现轮轴抱死现象;当列车运行速度小于30 km/h时,轮轴抱死的持续时间也不会超过400 ms。当城轨列车的运行线路轮轨间黏着条件不佳时,空气制动系统进行防滑保护时会对制动缸持续排风。为避免因持续进行滑行控制导致的制动力损失问题,在制动控制单元中需设置防滑监控模块。当硬件监视器检测到排气阀连续排风时间超过4 s或充气阀持续保压时间超过8 s,就会切除本轴空气制动的防滑控制。当制动力超过车轮与钢轨间的黏着力后,轮对由沿钢轨滚动变为与钢轨相对滑动。一旦轮轴抱死,将导致车轮和钢轨的强烈摩擦。列车的动能转变为车轮与钢轨的摩擦热能,使车轮踏面与轨面局部产生材料相变,严重时甚至会有剥离掉块现象,造成轮轨接触面擦伤。
当车轮滑动通过曲线时,抱死的车轮依靠曲线外轨的横向力进行偏转,轮缘与钢轨始终贴靠,还会造成轮缘磨耗速度加快,影响车轮通过曲线和道岔的安全性。所以列车前进方向的导轮抱死时,如要滑动通过小半径曲线段,应严格控制列车的运行速度[7]。
轮轴抱死会带来较大的振动冲击。车轮擦伤后若长时间运行,会对走行部造成损伤。为了更好地对列车运行及轮轴状态进行监测,提出了轮轴抱死检测概念。城轨车辆轮轴抱死检测是基于轴速差进行综合判断的。以某线路地铁车辆的轮轴抱死检测为例:当列车运行速度超过10 km/h时,列车制动发生滑行现象,若滑行轴的速度降低至3 km/h以下且此状态保持5 s以上时,判断为该轮轴抱死。抱死信息能够显示在车辆人机界面。
城轨车辆在发生轮轴抱死故障后,为了减少轮缘磨耗,保证车轮防脱轨的安全性,同时考虑车轮与轨面的损伤及可修复性,列车拖行速度一般选为15 km/h以下。
需要注意是,轮轴抱死检测与防滑保护系统是相互独立的系统,不管有没有轮轴抱死检测,防滑保护系统都能正常工作。另外,当车辆轴端速度传感器发生故障,会导致系统所采集的轴速信息失准,极易造成制动系统判定车轴抱死,并且错误上报车轴抱死故障信息。车轴抱死故障的发生,往往伴随着地铁列车停站清客检查,严重影响地铁列车的正常运营秩序。
4 结语
城轨车辆的防滑保护系统是保证列车安全运行的重要系统之一,防滑控制逻辑的正确性是保证列车防滑系统正常工作的前提。经过多年的运行经验累积与实践验证,城轨车辆防滑保护控制技术已经趋于成熟。牵引系统的电制动防滑和空气制动系统的空气制动防滑均以蠕滑率和减速度为判据进行滑行检测。通过对制动力的调整实现对轮轨间的黏着利用率最大化,尽量避免轮轴抱死和车轮擦伤现象的发生。在电空混合制动的防滑控制方面,需根据不同系统的特性及滑行判据的差异,采用合理的防滑控制接口方案,以确保系统间防滑功能的正确配合。电空混合制动的防滑控制已在多个城轨线路中成功应用。
防滑保护系统能将列车的当前制动力与当前轮轨黏着调整为接近水平,在防滑控制过程中产生一定的轮轨间清洁作用,通过车轮与轨道间的相对滑动在一定程度内改善轮轨黏着,但却不能实质性地改变轮轨间的黏着状态,特别是低黏着状态。因此,若要缩短列车滑行状态下的制动距离,需要与其他增黏措施结合使用。
