轨道交通车辆转向架主动径向控制器
2024-02-22高常君周宇航王中祥
胡 波 马 飞 高常君 周宇航 王中祥
(中车青岛四方车辆研究所有限公司技术中心,266031,青岛)
轨道交通车辆传统转向架的定位刚度较大,在通过中小半径曲线时,轮轨间存在明显的横向力,尤其是导向轮对,其轮轨磨耗较大,运营效率不高。
在传统转向架结构的基础上,主动径向转向架在构架和轮对轴箱之间设置了径向驱动装置[1]。当车辆沿直线轨道运行时,径向驱动装置锁定在固定位置上,以保证轮对轴线平行且具备足够的定位刚度;当车辆通过曲线轨道时,径向驱动装置使轮对轴线趋于轨道曲线的径向位置,使轮对冲角趋近于0,从而减小轮轨间的横向力,降低轮轨磨耗。为了提高车辆在既有线路和高速线路的跨线运营能力[2-3],从工程化应用的角度出发,本文参照需求和标准研制了一种径向控制器,在其探测到曲线的同时能够驱动径向作动器,使转向架轮对趋于径向位置,并在半实物仿真平台和环形线路上进行了主动径向系统的试验验证。本文研究可为主动径向系统的推广应用提供工程经验与技术指导。
1 主动径向系统及其控制原理
1.1 系统简介
主动径向系统由线路状态探测单元、径向控制器和执行机构组成,如图1所示。线路状态探测单元实时检测车辆的运行参数信息,径向控制器通过这些信息判断当前车辆是否进入曲线,并计算所进入曲线的半径。径向控制器根据车辆所处的曲线条件计算各径向作动器的目标位移,并发送至执行机构,执行机构驱动径向作动器动作,使轮对达到径向位置。
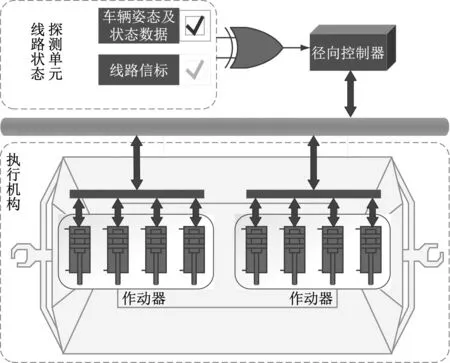
图1 主动径向系统组成示意图
1.2 控制原理
主动径向系统工作原理示意图如图2所示,转向架类型为轴箱内置式。其中:θ为转向架两条轮对轴线夹角的一半;a为径向作动器横向安装跨距;b为转向架轴距;R为轨道曲线半径。

图2 主动径向系统工作原理示意图
每条轮对两侧轴箱分别安装径向作动器并独立控制,当转向架轮对处于完全径向位置时,同一转向架4个径向作动器的位移可由式(1)近似计算获得:
(1)
式中:
x——径向作动器位移;
m——径向倍率,默认为1.0;
P——径向作动器位移与轴箱绕上端定位弹簧偏摆形成的轮对与转向架间的纵向位移比例系数,由转向架及径向作动器安装结构所决定,取为1.3。
线路曲率可以表示为:
(2)
式中:
k——线路曲率;
ω——车体摇头角速度;
ω′——车体摇头角加速度;
d——车辆定距;
v——车速。
式(2)能够补偿由车体几何尺寸引起的惯性滞后,使计算获得的曲率测量值与线路曲率实际值的同步性较高。
2 径向控制器研制
2.1 功能需求
径向控制器的功能主要包括:①接收传感器提供的车速、车体摇头角速度及信标信息;②计算线路曲率,判断车辆是否进入曲线,再计算曲率的倒数并取整,获取当前曲线半径;③根据当前曲线半径,计算各转向架径向作动器的目标参数;④根据主动径向控制策略,将控制指令发送给各转向架上的径向作动器;⑤具备网络通信、数据存储和故障记录功能。
2.2 硬件设计
根据设计需求,径向控制器采用标准3U机箱,电路板为插板形式,主要包括电源模块、径向控制模块、接口模块以及网络通信模块等,其径向控制器结构示意图如图3所示。
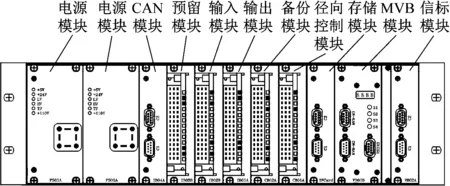
注:CAN为控制器局域网络;MVB为多功能车辆总线。
1) 电源模块。电源模块包括电磁兼容和过欠压保护电路,能够提供稳定的工作电源。
2) 径向控制模块。径向控制模块主要包括模拟量输入及RS485通信电路,主芯片采用dsPIC30F系列。模拟量输入是通过传感器将角速度、加速度等信号转换为电压信号,再经过滤波、信号放大和运放跟随后传至主芯片,角速度测量范围为±12(°)/s,加速度测量范围为±2g(g为重力加速度)。RS485通信电路与雷达进行通信,获取列车速度、运行距离等信息。
3) 接口模块。接口模块包括开关量模块、信标模块和存储模块。开关量模块包括带光电隔离的输入通道和继电器输出通道,负责采集光电开关的状态及输出系统故障信号。输入通道具有防反保护和逻辑自检电路,继电器输出通道具有短路保护和状态反馈自检电路。信标模块采用RS485通信电路与信标阅读器进行通信,获取信标信息。存储模块采用非易失性存储,可以存储3个月以上的数据。
4) 网络通信模块。网络通信模块包括CAN模块和MVB模块。CAN模块采用CAN网络与径向作动器进行通信,下发控制指令,同时收集径向作动器的状态。MVB模块负责与TCMS(列车控制与管理系统)进行通信,上传主动径向系统的相关数据。该模块还设置有数码管和按键,可以通过按键选择信标模式或主动检测模式,数码管显示当前工作模式。
2.3 软件设计
本节重点介绍主动径向控制策略及软件实现方法,参照EN 50128:2011《铁路应用—通信、信号和处理系统—铁路控制和监控系统的软件》定义的软件开发生命周期模型,将软件划分为A(模拟)/D(数字)采集、径向控制、数据处理、网络通信等多个组件。
2.3.1 A/D采集
A/D采集角速度传感器的模拟量值,软件循环读取模拟量采样端口的角速度信息,当采样次数达到设定阈值后,对采样值进行中值滤波,再对滤波结果进行边界判断,对在边界值范围内的数据进行低通滤波,对在边界范围外的数据进行故障诊断,最终返回角速度值。由于采用了低通滤波处理,角速度值的计算会引入延时,该延时时长为50 ms。
2.3.2 径向控制
径向控制分为精确型的信标模式和引导型的主动检测模式。信标模式根据所读取到的信标、行走的距离和存储的线路获取线路曲率;主动检测模式根据式(2)的曲率公式计算线路曲率,参照基于轨道交通车辆二系回转角的线路曲率测量方法[4],软件通过PID(比例积分微分)控制[5]调节车体摇头角的动态修正项。
径向控制器首先判断是否为信标模式,再根据精确型或引导型的不同模式获取线路曲率,检测列车运行方向的第一转向架是否进入曲线,在进入曲线开始径向动作的同时记录线路信息和位移数据,出曲线后记录曲线终点并终止数据记录,同时将径向作动器的位移清零。第一转向架径向控制程序流程图如图4所示,循环周期不超过10 ms。

图4 第一转向架径向控制程序流程图
其余转向架先根据车辆定距和邻车相邻转向架中心距计算其与第一转向架的间距,再根据列车行进的距离判断是否进入曲线,在曲线内与第一转向架保持相同的径向位移动作,出曲线亦然。其余转向架径向控制程序流程图如图5所示,循环周期不超过10 ms。
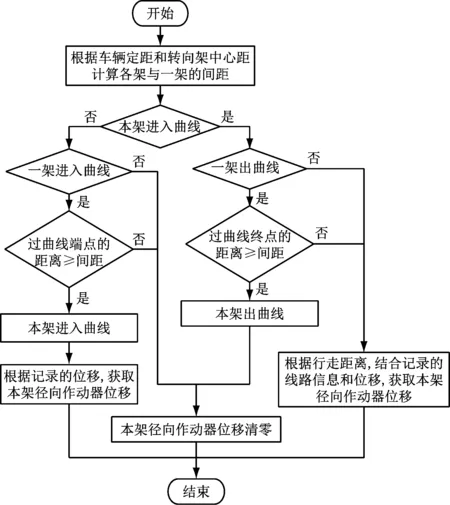
注:一架指列车运行方向的第一个转向架;本架指下一个即将进入或出曲线的转向架;各架指列车的各个转向架。
2.3.3 数据处理
将径向作动器位移指令、角速度、半径等发送的数据进行打包,将径向作动器状态、工作模式等接收到的数据进行解析,同时进行超时判断,当通信中断时采用默认的安全侧数据。
2.3.4 网络通信
网络通信包括CAN通信和RS485通信。通信组件包括初始化、错误处理及接收中断模块,以及对帧序号及数据进行校验。
3 仿真试验验证
为确保系统装车后的运行安全,在地面搭建了半实物仿真平台,采用车辆实时动力学仿真模型与主动径向系统产品实物相结合的方式[6]进行逻辑验证和性能测试。
3.1 半实物仿真平台
半实物仿真平台主要包括车辆动力学仿真、测控系统和机械台架三部分。车辆动力学仿真模型使用Simpack软件搭建,线路模型可以根据需要进行设置,一般为包含直线、缓和曲线、圆曲线、缓和曲线、直线的完整曲线。测控系统负责各模块之间的数据传输和模式转换,机械台架模拟主动径向系统在车辆上的功能和布局。
试验运行时,仿真器进行车辆动力学模型仿真运算,获得车辆速度、车体摇头角速度等参数。测控系统通过以太网实时接收这些参数,并将其转化为模拟量信号发送给径向控制器。径向控制器接收到这些信号后进行判断和运算,计算各径向作动器的位移数据,并通过CAN网络发送给执行机构,驱动径向作动器动作。径向作动器的实际位移由位移传感器测量获得,仿真器中的车辆动力学模型接收到各径向作动器的位移数据后,驱动模型中的径向作动器动作,带动轮对趋于线路曲线的径向位置,从而实现主动径向系统的硬件在环测试。
3.2 试验验证
车辆仿真模型以70 km/h的速度通过带有缓和曲线的右向曲线,曲线半径为300 m,对系统的工作过程、响应时间等进行测试,并将径向作动器实际位移输入车辆动力学模型进行轮轨横向力等参数的仿真。两个转向架径向作动器位移曲线如图6所示。径向作动器的实际位移为2.7 mm,与理论计算值一致。相较于前转向架,后转向架径向作动器的响应时间理论值(车辆定距除以车速)为915 ms,后转向架径向作动器的响应时间实际值为894 ms,与理论值基本一致,符合径向控制策略。转向架各轮对的轮轨横向力仿真曲线如图7所示。转向架主动径向通过曲线时的轮轨横向力明显小于被动式通过曲线时的轮轨横向力,其中导向轮对的表现尤为突出。
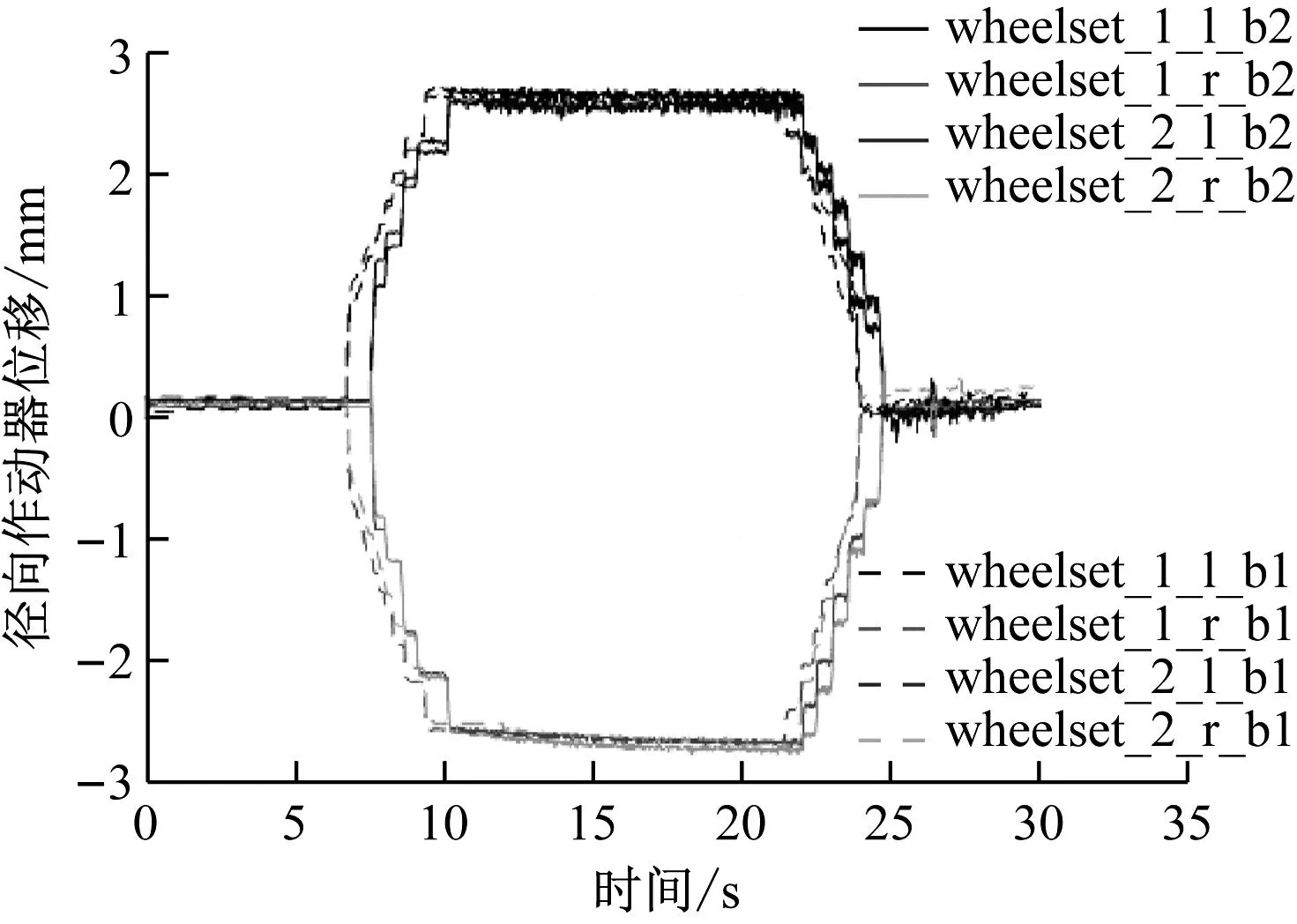
注:wheelset_1表示转向架的导向轮对;wheelset_2表示转向架的非导向轮对;l表示曲线外侧车轮;r表示曲线内侧车轮;b1表示前转向架;b2表示后转向架;径向作动器位移以径向作动器向外伸出为正,以径向作动器向内缩回为负,转向架前后轮对轴线呈外八字,趋于径向位置通过曲线;余类同。

注:n表示转向架主动径向通过曲线;p表示转向架被动式通过曲线;轮轨横向力以行车方向左向为正,以行车方向右向为负。
主动径向系统的响应时间总计为150 ms,包括车体角速度计算时低通滤波引入的50 ms延时,以及径向作动器从接收到指令至开始动作的100 ms延时,该响应时间是影响系统运行效率的关键因素之一。但由于连续缓和曲线的存在,结合径向控制器的曲线半径算法,响应时间的影响可以忽略不计。试验台接收到的线路曲率及径向作动器位移曲线如图8所示。其中,线路曲率是通过仿真器发送的车体摇头角速度和车辆速度等参数计算得到的。考虑到实际线路存在缓和曲线,在试验中设定将曲线半径为800 m作为主动径向系统工作的起始点来考核系统的响应时间。由图8可知:车辆进入曲线至曲线半径为800 m的位置时,相较于理想状态,即曲线半径为800 m处的理论位移,径向作动器已提前约40 ms达到指定位移;当车辆驶出曲线至曲线半径为800 m的位置时,径向作动器已开始动作,达到指定位移的延时约为260 ms。
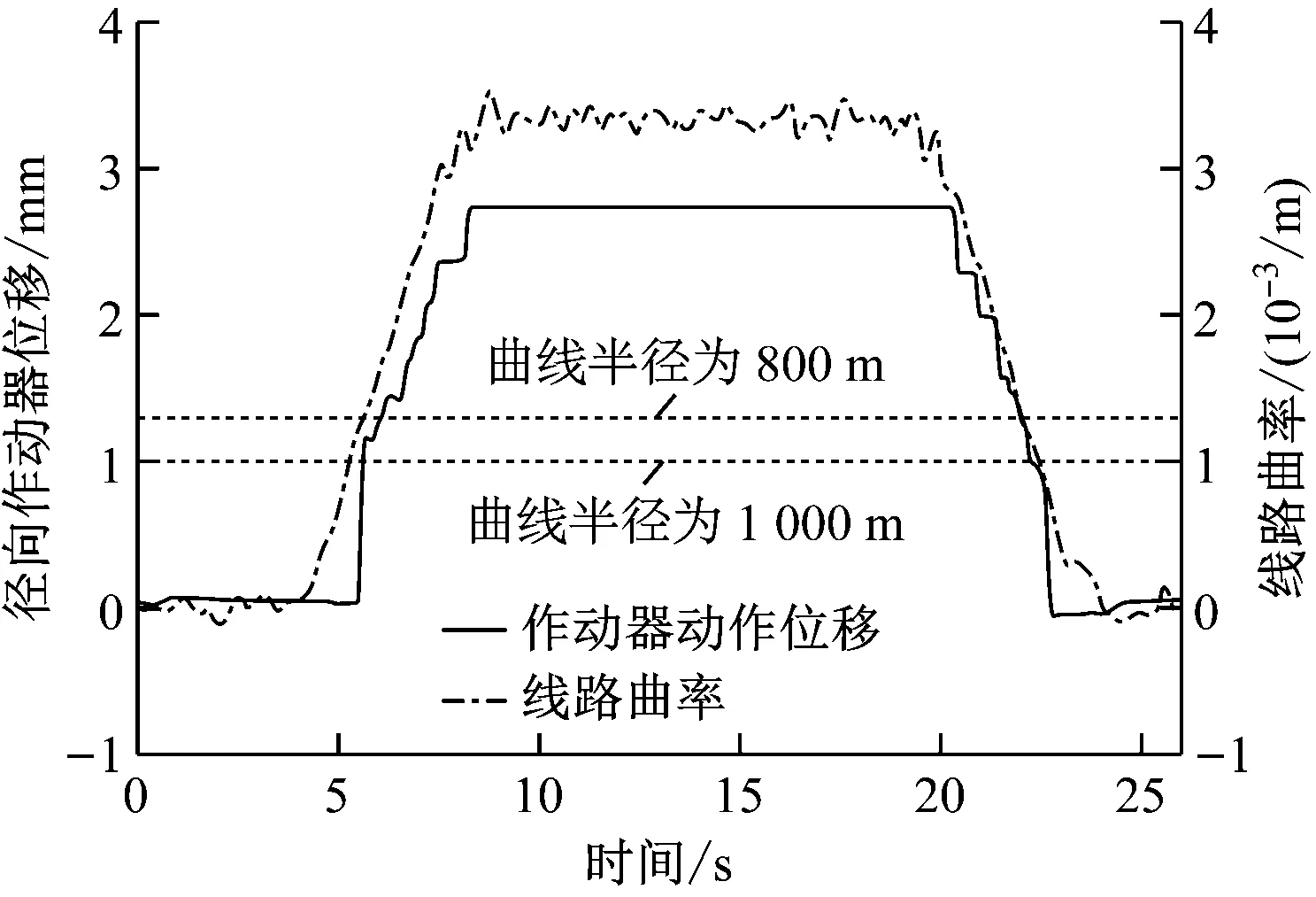
图8 试验台接收到的线路曲率及径向作动器位移曲线
4 环形线路试验验证
4.1 试验工况
2021年4月,主动径向系统在CR400AF-S双层动车组试验车上进行装车,并在环行线上进行了试验。环形试验线路从起点开始包含了长约730 m、半径为250 m的右向曲线段,多个小半径曲线及直线段的组合,长约770 m、半径为280 m的右向曲线段,以及长约760 m的直线段。试验按照列车直线段的运行速度15~60 km/h、曲线段的运行速度15~30 km/h、主动检测模式和信标模式等多种工况组合进行。为进一步研究径向位移对轮轨横向力的影响,设定式(1)中径向倍率m为0.8~1.6,结合线路实际运行工况,对比验证各项指标参数。
4.2 试验过程
试验过程中,先设定主动径向系统的工作模式为引导型主动检测模式或精确型信标模式,再设定径向倍率,然后以不同的列车运行速度围绕环形试验线运行,如此反复进行多次试验。引导型主动检测模式实测径向作动器位移如图9 a)所示,其与环形试验线的线路信息吻合。采用精确型信标模式时,信标设置在半径为250 m的右向缓和曲线前20 m处,精确型信标模式实测径向作动器位移曲线如图9 b)所示,该图验证了主动径向系统能够准确响应信标模式。

a) 引导型主动检测模式
4.3 试验结果分析
对环线试验中主动径向系统的测试数据进行处理,取列车在直线段的运行速度60 km/h、曲线段的运行速度30 km/h的相关数据,以半径为250 m的右向曲线段为例,分析主动径向系统对列车通过曲线时的轮轨横向力的影响。
当主动径向系统采用引导型主动检测模式通过曲线段时,导向轮对内外侧车轮的轮轨横向力曲线如图10所示。主动径向作动器通过曲线时的轮轨横向力明显小于被动式通过曲线时的轮轨横向力,且随着径向作动器位移量的增加,轮轨横向力的降低更明显,在1.2倍径向作动器位移时,轮轨横向力达到最小值。
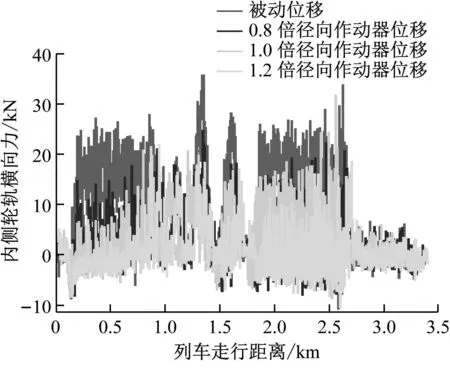
a) 内侧
当主动径向系统采用精确型信标检测模式通过曲线段时,导向轮对内外侧车轮的轮轨横向力曲线如图11所示。轮轨横向力的变化趋势与引导型主动检测模式类似,在1.4倍径向作动器位移时,轮轨横向力达到最小值,但超过1.4倍径向作动器位移时,轮对冲角反向增大,轮轨横向力不降反升。
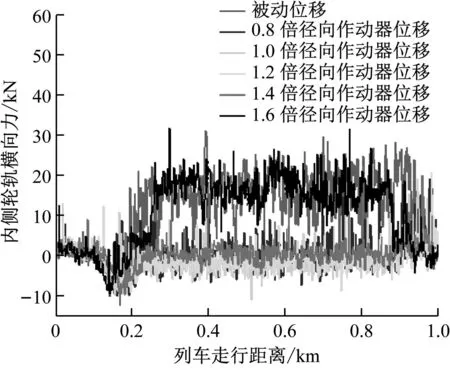
a) 内侧
精确型信标检测模式下的非导向轮对内外侧车轮轮轨横向力对比如图12所示。非导向轮对的变化趋势与导向轮对相同,但其变化量小于导向轮对的变化量。
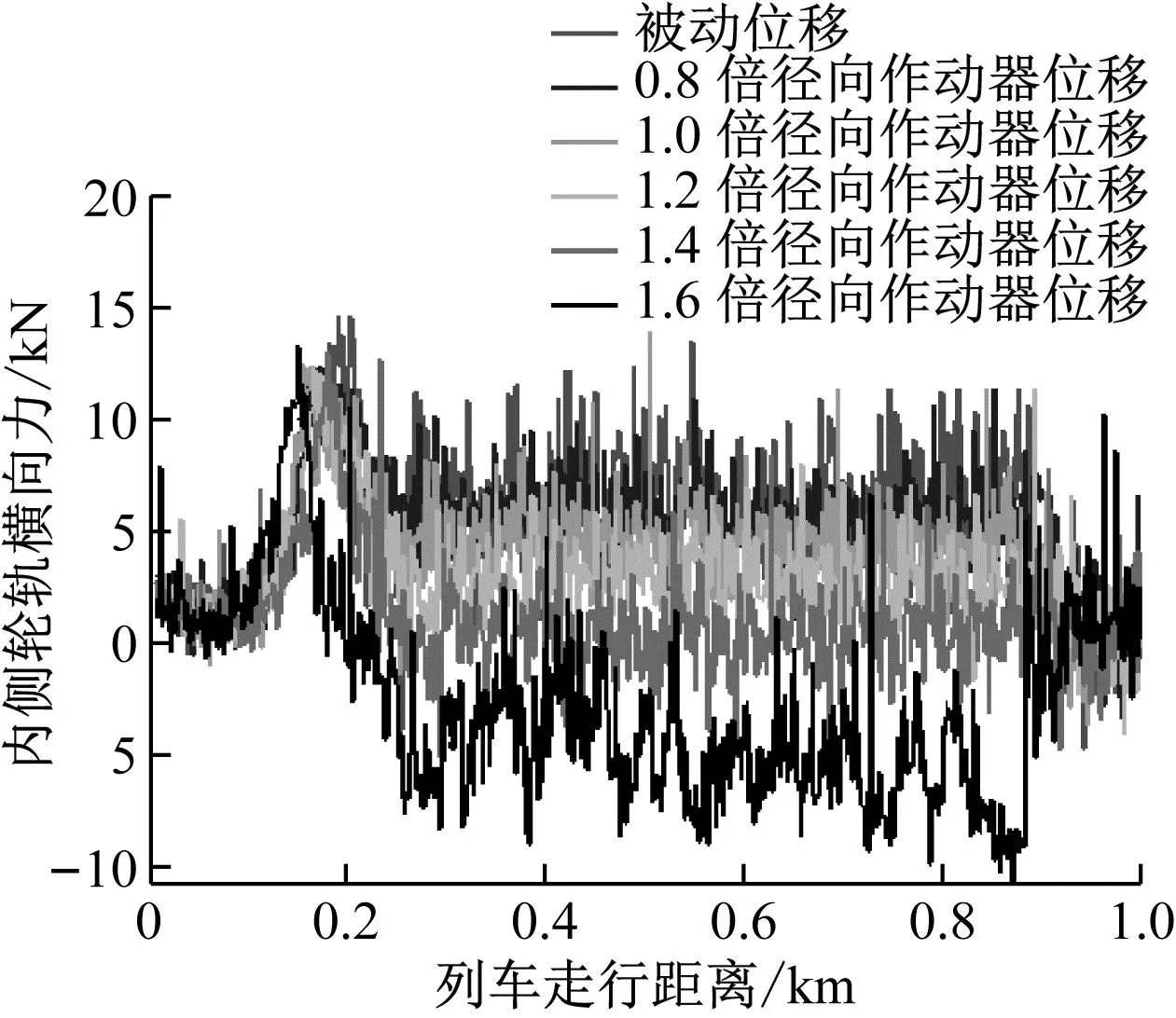
a) 内侧
5 结语
通过仿真试验和环行线路试验,对径向控制器的功能及性能进行验证,主要获得以下结论:
1) 无论采用引导型主动检测模式还是精确型信标检测模式,径向控制器均能有效探测到曲线段,使转向架轮对趋于径向位置通过曲线段,且符合实际的线路信息。
2) 径向控制器驱动第一转向架和其余转向架的径向位移一致,各转向架径向作动器的动作延迟时间与理论计算值相符,符合主动径向控制策略。
3) 列车在进出曲线时,径向控制器能够驱动径向作动器即刻或提前完成动作,有效改善迟滞时间。
4) 对比仿真试验和环行线路试验,安装有主动径向系统转向架的列车在通过曲线段时,其轮轨横向力的变化趋势一致,均明显小于传统车辆被动式曲线通过状态下的参数指标,其中导向轮对的表现尤为突出。所提主动径向控制器有效提高了列车的曲线段通过性能,降低了轮轨磨耗。
