有轨电车通过平交路口车路协同速度控制系统*
2024-02-22童文聪李君羡
童文聪 滕 靖 姚 幸 李君羡
(1.同济大学交通运输工程学院,201804,上海;2.上海市轨道交通结构耐久与系统安全重点实验室,201804,上海; 3.上海城建设计研究总院,200125,上海)
有轨电车一般铺设于城市道路中央或路侧,其在路段行驶时常使用专属路权,以避免受到其他车辆或行人的干扰。当有轨电车通过平交路口时,由于存在不同方向的交通流冲突,需与其他交通形式共享道路空间并依照信号灯指示通行,因此有轨电车通常采用信号优先技术来提高平交路口不停车的通行概率。有轨电车路段的限速一般为50~60 km/h,但出于安全考虑,有轨电车在平交路口必须减速行驶。根据相关规定[1],有轨电车在通过平交路口时的行驶速度不得超过30 km/h。在平交路口频繁加减速将影响有轨电车整体的行程车速[2],还会增加其能耗损失。
为解决有轨电车在平交路口必须降速的问题,本文提出一种有轨电车通过平交路口车路协同速度控制系统,分析了有轨电车通过平交路口的车速特征,阐述了有轨电车不减速通过平交路口的实现原理及其系统物理结构和控制逻辑,最后基于不同平交路口位置特征评估所提控制系统的实施效益。本文研究可为提升有轨电车的行驶速度及可靠性提供研究思路和技术指导。
1 有轨电车平交路口运行特征分析
有轨电车在平交路口一般采用司机目视的行车方式,即:有轨电车在进入平交路口前开始减速;在通过平交路口时,其运行速度控制在平交路口所允许的最大限速内;在确认无潜在冲突后,有轨电车加速离开平交路口。以上海松江有轨电车T2线为例,分析其实测数据可知,有轨电车在平交路口的运行轨迹呈V字形,存在一个运行速度最低点vmin,其值直接影响有轨电车在平交路口的运行速度。
由于平交路口可能出现的冲突干扰和人工驾驶操作的不确定性,有轨电车在平交路口运行时,具有一定的随机性。取177条有轨电车不停车通过平交路口的速度轨迹曲线(假设平交路口限速为30 km/h),对其在置信度为0.05条件下进行 K-S (Kolmogorov-Smirnov)检验。研究结果表明,vmin满足N(20.3,10.3)的正态分布检验要求,极端误差D=0.068。将vmin样本数据按速度大小等距划分为30组,绘制其频率分布图如图1所示。由上述统计数据可知,vmin的期望值为20.3 km/h,远小于平交路口的限速值,其标准差为10.3,说明vmin较不稳定。vmin对有轨电车的运行效率和可靠性有较大的影响。
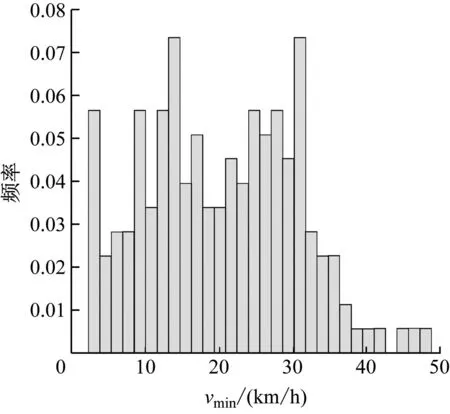
注:频率指各组样本数据个数与样本总数的比值。
2 有轨电车通过平交路口车路协同速度控制系统设计
有轨电车制动减速度较小,以运行速度为60 km/h为例,其紧急制动需要的时间约为9 s,制动距离不小于100 m;常规制动需要的时间约为18 s,制动距离不小于200 m[3]。由于制动距离和制动时间过大,有轨电车驾驶员无法在高速行驶时预判平交路口可能存在的冲突,只能在通过平交路口时采用较低的速度行驶,以保证足够的制动反应时间。
为解决有轨电车在高速运行条件下制动时间较长、平交路口冲突无法预判的问题,本文拟采用可控实体隔离方法,由有轨电车主动发出隔离控制请求,预先对平交路口通行区域进行清空,以保证列车在制动反应时间内不会发生不可预计的冲突,进而达到不减速通过平交路口的目的。
为解决控制系统运行的安全性问题,本文拟采用清空区冲突检测技术,有轨电车可根据所获得的平交路口检测情况,对可能发生的危险进行预判,对不符合快速通过要求(如无绿灯信号或清空区被占用)的有轨电车,实行降速或紧急制动处理。同时,将平交路口当前视频监控信息发送给司机进行二次安全评估,增加所提控制系统的可靠性。此外,增加有轨电车通过警示信息,以倒计时的方式给平交路口通行的车辆和行人予以提醒,减少违规侵占清空区的情况。
基于上述设计思路,本文提出一种有轨电车通过平交路口车路协同速度控制系统。所提控制系统由平交路口路面设施、平交路口控制系统和有轨电车车载控制系统三部分组成。有轨电车通过平交路口车路协同速度控制系统结构示意图如图2所示。平交路口路面设施包括有轨电车传感定位系统、交通信号控制机、清空区及冲突检测设备、可控实体隔离设备、警示系统和视频监控系统。平交路口设施布置示意图如图3所示。
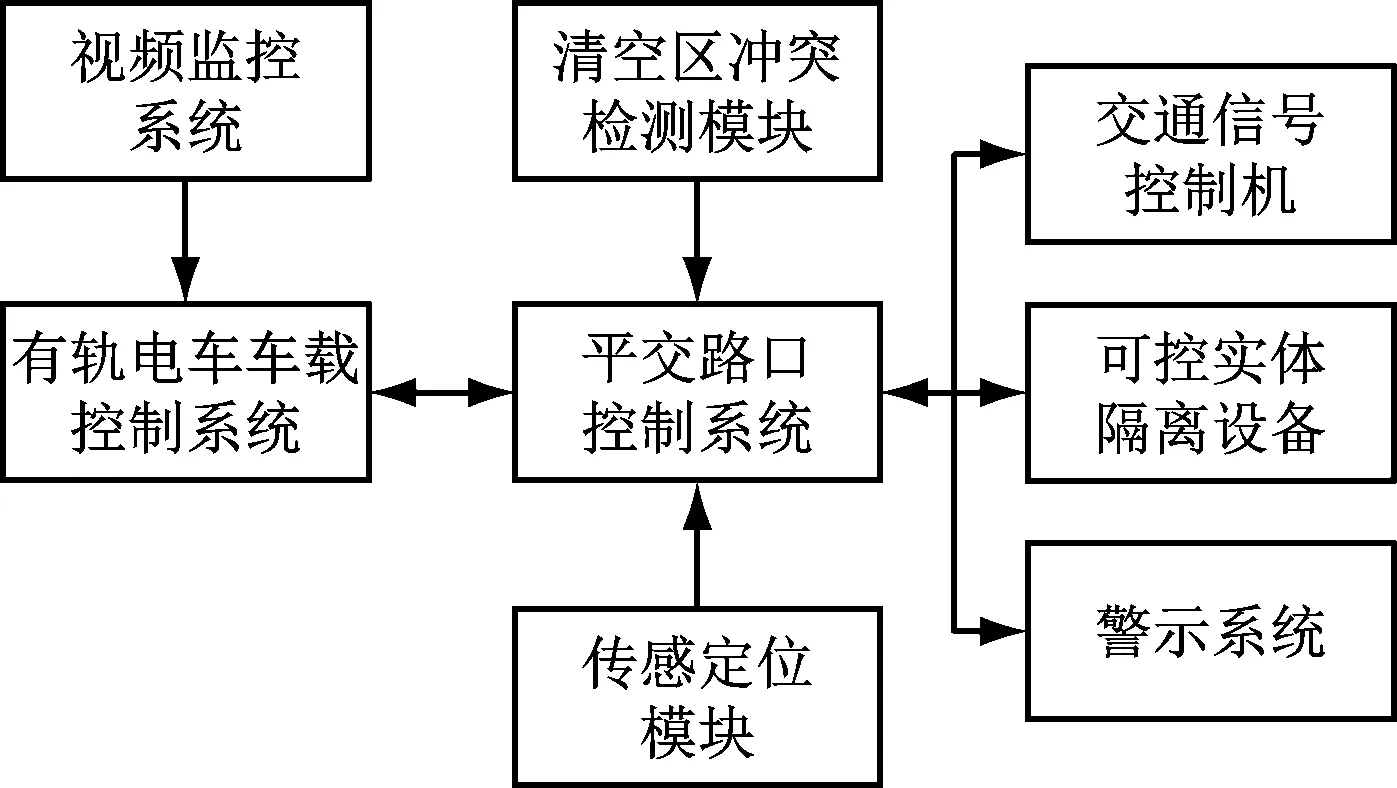
图2 有轨电车通过平交路口车路协同速度控制系统结构示意图
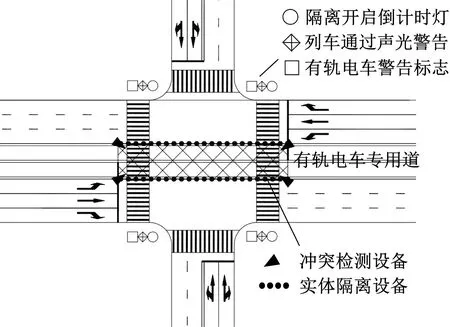
图3 平交路口设施布置示意图
平交路口控制系统主要用于对平交路口的路面设施进行管理,配合和支持有轨电车车载系统。有轨电车车载系统内含控制算法模块,可对平交路口路面设施的传输信息进行分析与逻辑计算,并执行控制系统指令。平交路口路面设施的功能设置如下:
1) 交通信号控制机。配合有轨电车车载系统的控制算法,能够实现有轨电车平交路口信号优先通行。
2) 警示系统。响应有轨电车车载控制系统控制算法发出的控制指令,向平交路口车辆和行人提供有轨电车即将通过的声光预警和隔离操作倒计时。
3) 清空区及冲突检测设备。清空区为保证有轨电车能无阻碍通过平交路口所划定的区域,由有轨电车的通行轨迹与平交路口范围相交平面构成。冲突检测设备用于检测预划定的清空区是否存在行人、车辆或其他阻碍物,并将检测结果反馈给有轨电车车载系统。当有轨电车即将驶入平交路口时,如清空区未清空,将通知有轨电车减速,并撤销隔离操作。清空区检测可采用多种检测技术,如视频识别、微波或重力感应技术等,互为冗余,以保证系统的可靠性。
4) 可控隔离设备。所提控制系统通过临时性的实体路障划定隔离区域。根据有轨电车车载控制系统控制算法发出的控制指令,可控隔离设备在规定时间内完成该平交路口建立或撤销隔离操作,并向系统返回操作成功与否的信息。可控隔离设备能临时性形成一个有轨电车通行独享的封闭区间,阻止车辆、行人和非机动车穿越有轨电车通行通道,避免冲撞。
5) 平交路口传感定位设备。平交路口传感定位系统包括5组有轨电车位置检测器,在有轨电车通过预设定轨道断面时生成1组车辆断面通过信号,并将信息传输至有轨电车车载系统,有轨电车车载系统由此获得有轨电车相对于特定平交路口所处的位置信息。
5个定位检测器铺设示意图如图4所示,对5个有轨电车定位检测器的位置作如下设置。
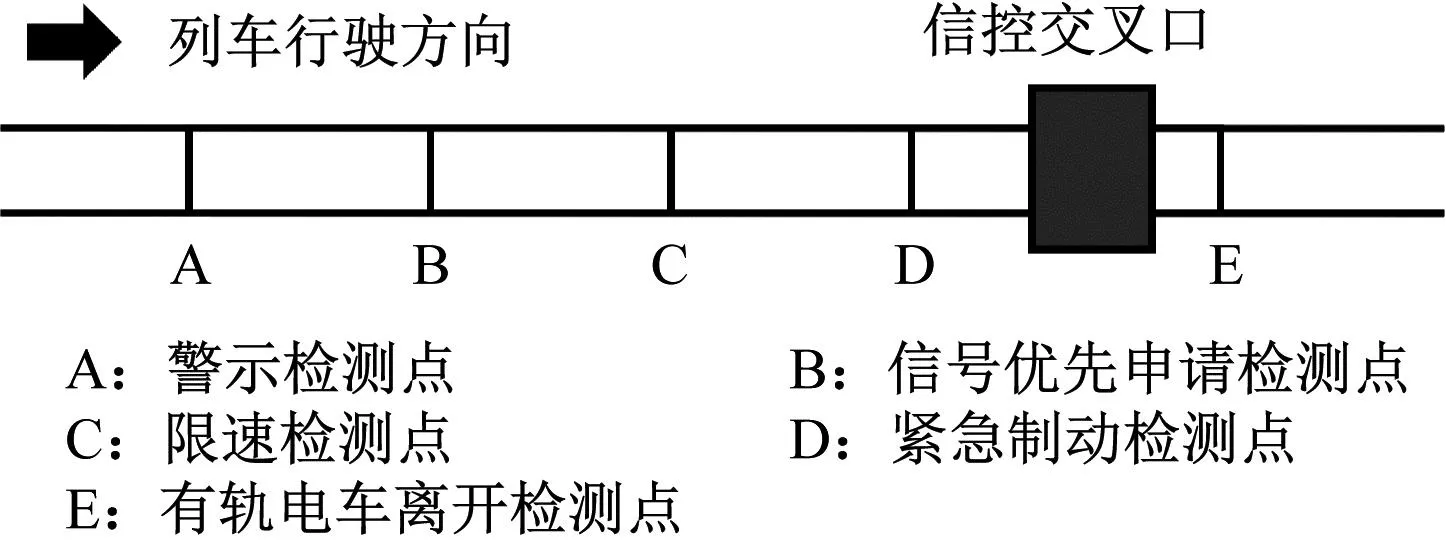
图4 定位检测器铺设示意图

2) 第二定位检测器,位于信号优先申请检测点B,其至路口停车线的距离dB应满足:dB≥dsm,dsm为平交路口信号控制系统进行公交优先申请所需的最小距离[4]。
3) 第三定位检测器,位于限速检测点C,其至路口停车线的距离dC应满足:dC>dsl,dsl为该区段有轨电车采取一般制动时从区段可能最高速度降低至平交路口限速以下所需距离。
4) 第四定位检测器,位于紧急制动检测点D,其至路口停车线距离dD应满足:dD≥deb。
5) 第五定位检测器,位于有轨电车离开检测点E,其至有轨电车平交路口最近冲突点距离dE应满足:dE≥Lv,Lv为有轨电车长度。
由于有轨电车的起始车速受上游停车点的影响,其定位检测器距离停车线的位置与上游站台间距有关。以上海松江有轨电车T2线的车辆参数为计算依据,以平直线路为基本运行场景,取tcd=10 s,tse=7 s,有轨电车限速vlim=60 km/h,通过计算获得的各定位检测器至停车线距离如表1所示。由于信号优先申请及反馈速度较快,因此检测点B距停车线位置只需比检测点C略大即可,本文取为30 m。检测点E设在有轨电车与平交路口最后交通冲突点下游50 m处。

表1 定位检测器至停车线距离
3 控制逻辑设计
控制算法模块用于执行有轨电车通过平交路口的自动控制逻辑,控制算法模块运行流程图如图5所示。
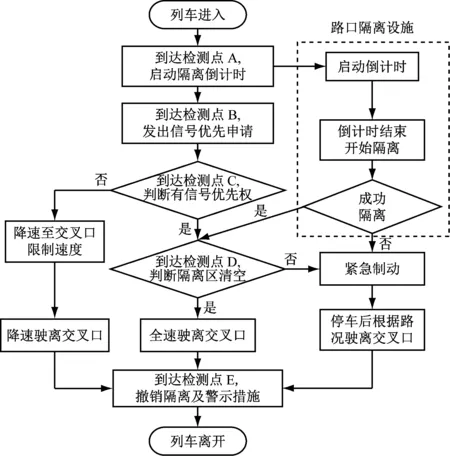
图5 控制算法模块运行流程图
控制算法模块运行步骤如下:
步骤1 有轨电车以全速运行,到达检测点A,向警示系统发送警示要求,启动隔离倒计时,同时将平交路口实时监控画面反映到有轨电车驾驶室。
步骤2 有轨电车继续全速运行,由远及近靠近平交路口,到达检测点B,向交通信号机发送信号优先申请并等待回复。
步骤3 有轨电车继续全速行驶,到达检测点C,此时,若未收到信号优先许可信息、优先许可信息为否或检测到系统故障,进入步骤4,否则进入步骤5。
步骤4 有轨电车启动常规制动,将车速降低至平交路口限速以下,同时取消隔离倒计时和后续隔离操作,由司机视实际情况驾驶通过平交路口。
步骤5 有轨电车继续全速前进,并在隔离倒计时结束时启动隔离操作,如隔离操作执行成功,对清空区进行冲突检测并向有轨电车发送检测结果。当有轨电车到达检测点D时,若隔离操作执行失败、清空区检测存在冲突或检测到系统关键模块发生故障,进入步骤6,否则进入步骤7。
步骤6 有轨电车启动紧急制动,在进入平交路口前停下,撤销隔离操作,由司机视实际情况驾驶通过平交路口。
步骤7 有轨电车全速通过平交路口,达到检测点E,撤销隔离操作并离开平交路口。
考虑到有轨电车启动紧急制动易引发客伤事件,应加强其设备可靠性以避免发生故障,必要时配备安全管理员进行秩序管理,减少紧急制动触发概率。
4 控制系统实施效应分析
有轨电车站台一般结合平交路口进行设置,而在设站平交路口有轨电车必停车,因此所提控制系统主要设置在不设站平交路口处,且所提控制系统实施效果与站台和平交路口位置有关。有轨电车站间距一般为600~1 000 m,平交路口常见间距为300~600 m,两个站台之间常存在一个不设站平交路口,以此常见情况为基本研究区间。设M点、N点为有轨电车站台,O为不设站台平交路口。MN距离为l,MO距离为l1,NO距离为l2,设MO距离与MN距离的比例r=l1/l,r值表征了平交路口在区间所在的相对位置。
以上海松江有轨电车线路列车运行参数为例,构建有轨电车运行评价模型[5]。计算当vmin=20.3 km/h时,不同l和r条件下,所提控制系统实施前后,区间运行延误和能耗的变化情况。平交路口相对位置比例r会影响有轨电车的加速距离,进而影响有轨电车在平交路口的通过速度,导致区间运行时间和能耗指标的变化。考虑有轨电车运行有两个方向,r的取值采用双向来车均值,即r与1-r对称,故设r的取值范围为0.1~0.5。以路段限速60 km/h的平直线路为基本运行场景,对所提控制系统进行实施效应评价。由于l和r均会对实施效果造成影响,设l在200~2 000 m范围内以100 m为间隔取值,r在0.1~0.5范围内以0.1为间隔取值,生成评估场景集合。
设tb、ta分别为所提控制系统实施前、后的有轨电车区间运行时间,二者比值pt=tb/ta。不同r条件下,pt与l的关系如图6所示。由图6可知:pt随着l的增大呈现先增大后减小的趋势,同时其随着r的增大而逐渐增大;当l=500 m、r=0.5时,pt达到峰值116.6%。这说明所提控制系统所在平交路口距离前后站台250 m时的运行速度提升比例最高。

图6 不同r条件下pt与l之间的关系
不同r条件下,延误减少量与l之间的关系如图7所示。由图7可知:区间运行延误减少量随着l和r的增大而增大,但在达到峰值9.2 s后不再增加。这说明在这些场景下有轨电车已充分加速,在平交路口的运行速度已达到路段限速,无法再提升,延误减少量在该情况下达到上限。

图7 不同r条件下延误减少量与l之间的关系
由于所提控制系统能够减少减速制动的能量损失,其同时也能够减少有轨电车的区间运行能耗。设eb、ea分别为所提控制系统实施前、后的有轨电车区间运行能耗,二者比值pe=eb/ea。不同r条件下,pe与l的关系如图8所示。由图8可知:pe随着l的增大呈现先增大后减小的趋势,同时其随着r的增大而逐渐增大;当l=700 m、r=0.5时,pe达到峰值162%。
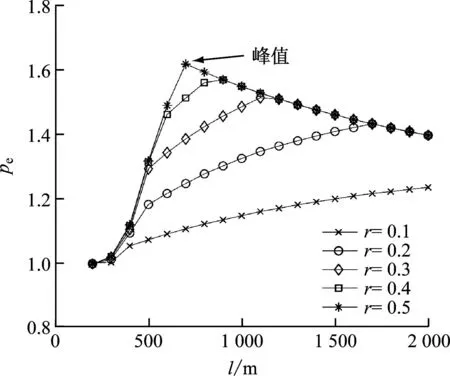
图8 不同r条件下pe与l之间的关系
为研究有轨电车通过平交路口的运行时间偏差特性,已知vmin~N(20.3,10.3),基于蒙特卡洛思想,对不同l和r条件下,执行5 000次vmin随机选值,并代入模型计算其标准差分布特性。不同r条件下区间运行时间标准差与l之间的关系如图9所示。由图9可知:随着l和r的增大,有轨电车受到的平交路口速度干扰逐渐增大,但增幅逐渐放缓,稳定后的标准差数值约为5.3 s。由此可知,所提控制系统可以降低有轨电车由于平交路口限速引发的速度偏差,进而提高有轨电车运行的时间可靠性。
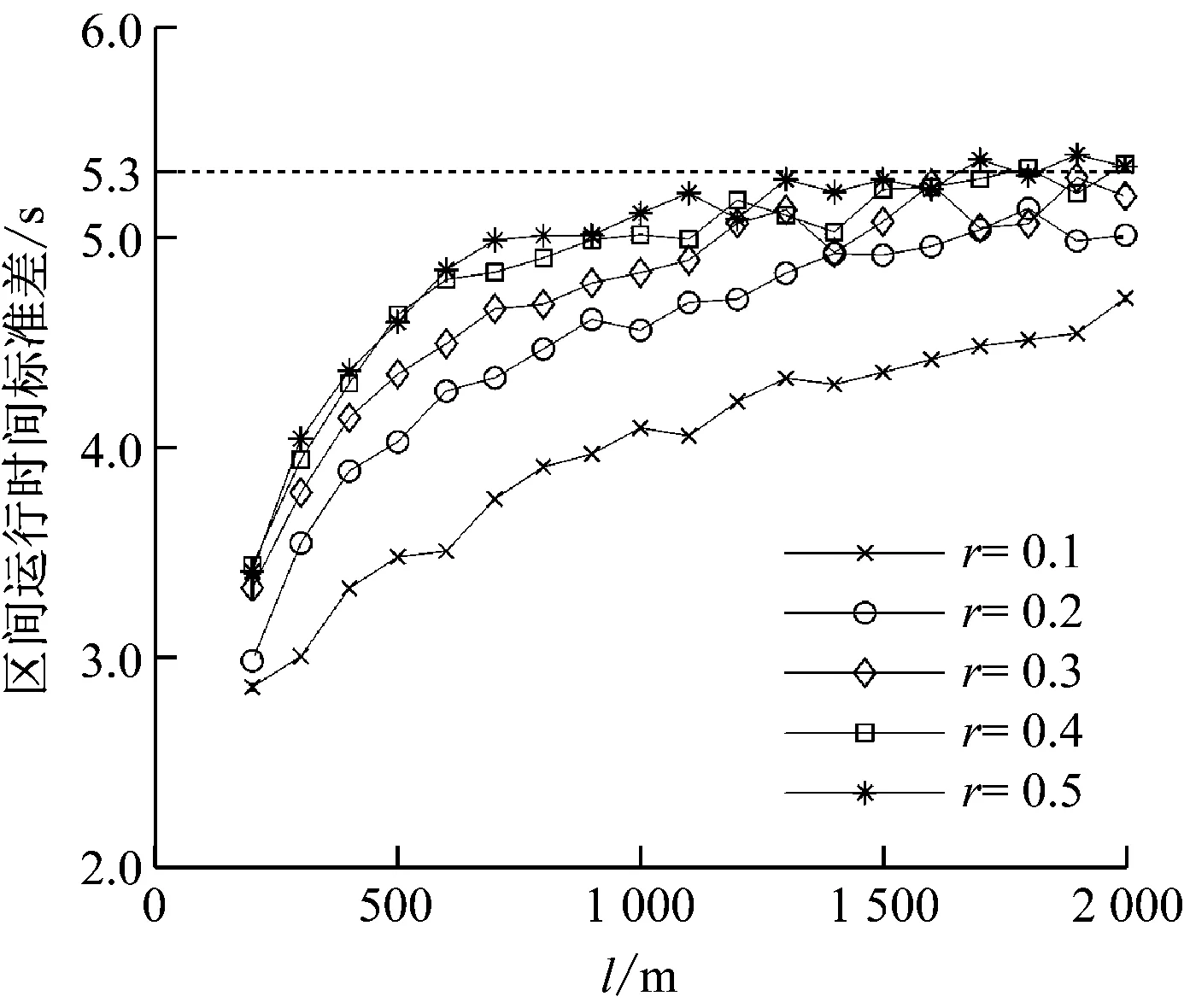
图9 不同r条件下区间运行时间标准差与l之间的关系
综上所述,所提控制系统对降低有轨电车延误、减少能耗和提高运行时间可靠性作用显著,其实施效果与平交路口位置和区间长度有关,当平交路口与前后站台相距超过250 m时,所提控制系统具有较好的实施效益。
5 结语
区别于地铁和轻轨,有轨电车的主要特征在于平交路口的非封闭性,有轨电车通过平交路口时呈V字型减速后再加速,存在一个运行速度最低点,其值直接影响有轨电车在平交路口的运行速度。本文提出一种有轨电车通过平交路口车路协同速度控制系统,基于列车定位技术和清空区冲突检测技术,采用临时性实体隔离方式创建有轨电车独享通行空间,使有轨电车能以较大概率不减速通过平交路口,有利于提高有轨电车的运行速度及时间可靠性,降低运行能耗。
不同平交路口相对上下游停车点的位置对所提控制系统的实施效果有较大影响。因此可根据实际线路情况选择实施点位。线路中可以只对部分无站台平交路口进行改造,改造量小且能取得较好的效果。此外,由于可控隔离的建立和撤销会占用一定的绿灯时间,对信号控制方案有一定的影响,应结合具体情况进行分析研究。
