复杂环境下无人机集群运动一致性的群体熵度量
2024-02-16刘云平牛天宇敖洋钒周朝杰还红华张婷婷
刘云平,牛天宇,敖洋钒,周朝杰,还红华,张婷婷
(1.南京信息工程大学 江苏省大气环境与装备技术协同创新中心,南京 210044;2.江苏省农业科学院,南京 210014;3.中国人民解放军陆军工程大学,南京 210001)
无人机集群因其低成本、大规模、高协同性等优势,广泛应用在城市作战、搜索救援等领域[1],无人机智能集群技术是未来无人机技术的重要研究方向[2]。随着无人机集群技术的发展,越来越多的飞行任务需要无人机在城市楼宇、户外山林等复杂变化的飞行环境中集群作业[3,4],其中广泛存在障碍物复杂多变、无人机通信与感知能力受限等不确定因素,对于无人机稳定集群造成不可忽视的约束作用[5]。当前基于预设群体运动行为控制的方法难以实现快速动态调节,在无人机实际飞行过程中系统时延、传感器的累积误差等因素难以规避,引起集群系统难以跟踪预设状态,导致基于预设行为的集群控制失效[6]。因此,如何在复杂变化的飞行环境中实现集群模型的快速自适应调节,保持无人机集群运动一致性,仍是目前无人机智能集群领域值得研究的问题。
针对复杂环境下无人机集群运动一致性问题,建立合理稳定的集群模型至关重要。在以往的研究中人类通过对昆虫、鸟类等群体生物的集群行为研究总结出许多智能集群算法[7-9],此类算法最早可以溯源到Reynolds 通过对鸟类群体运动的观察分析[10],总结出的集体运动三条基本准则:第一条是排斥作用,用于避免集群个体之间的碰撞;第二条是对齐作用,用于使集群个体与附近个体的速度矢量保持对齐;第三条是内聚作用,用于保持个体聚集在一起。基于上述三条准则,Reynolds 在计算机仿真软件中建立了Boid模型,为后续分布式集群模型提供了理论基础。R.Olfati-Saber 等提出了一种用于设计和分析多代理网状系统的分布式集群算法[11],解决了蜂拥模型中自主集结和避障问题。以Boid 模型为典型的群体蜂拥集群模型为无人机集群提供了理论基础,但由于此类模型仅考虑集群中个体自身的运动状态,而忽略了真实飞行状态下的环境因素,因此无法实际应用于无人机集群飞行。随着计算机视觉、无线通信等技术的发展,针对真实飞行环境中的无人机集群研究层出不穷。浙江大学FastLab 实验室的Xin Zhou 等设计了快速反应的轨迹规划器[12],展现出分布式无人机集群在杂乱环境中强大的导航能力,但由于无人机集群缺乏分布式控制模型,因此在复杂飞行环境中难以保持运动一致性。比利时物理学家Tamás Vicsek 团队针对真实环境下的无人机集群飞行提出一种集群模型,Csaba Virágh等提出了一种基于个体速度的无人机集群模型[13],该模型考虑到无人机集群飞行时运动和通信范围受限、通信存在延迟等问题,通过设计带有粘性摩擦项的速度计算函数,实现相邻无人机之间的速度融合;Gábor Vásárhelyi 等建立了一种真实无人机蜂拥模型[14],设计了一种具有顺序参数和适应度函数的模型参数优化框架,实现了十架四旋翼无人机的自主集群飞行。VICSEK 模型提供了一种考虑真实飞行条件的无人机分布式集群控制方法,但由于其参数调节缺乏对集群运动稳定程度的考量,在复杂飞行环境下难以实现快速自适应调节,易发生系统振荡、收敛速度慢甚至集群发散等问题,难以保证无人机集群运动的一致性。因此,要解决复杂飞行环境下的无人机集群运动稳定性问题,需要建立集群运动稳定程度的度量标准,并基于此动态调节无人机集群模型参数,在动态变化的外部干扰下保持无人机集群运动一致性。北京航空航天大学的段海滨团队针对群体智能系统的群体熵度量问题做出深入研究,罗杰等提出了群体智能系统的基本特性以及其形成的激发汇聚建模[15],指出群体智能系统实质上是一类复杂非线性动力学系统,讨论了群体智能系统群体熵度量所应满足的基本性质。陈琳等针对受限环境中无人机集群的目标合围控制问题[16],提出了一种基于局部度量距离交互的分布式集群目标合围控制方法,实现基于熵度量的无人机集群控制。通过上述工作可以看出,无人机集群中的群体熵度量具备科学可行性以及较高的自适应调节能力。
本文提出一种无人机集群运动一致性的群体熵度量理论,通过建立群体运动行为稳定程度的熵度量函数,并将其作为个体之间协同运动的适应度值指标,实现复杂环境下无人机集群运动一致性的自适应调节。由于智能本身是一种抽象的实体,难以对其进行直接的评估和度量;而群体智能系统的行为是群体智能的外在表现形式,是一种可以直接度量的现象,所以可以从系统的动力学行为入手,探索群体智能系统的度量理论和方法。
1 无人机分布式集群模型
考虑三维欧氏空间中由N架无人机组成的集群系统,可建立无人机在惯性参考系坐标下的运动学模型:
式(1)中下标i∈N表示集群中第i架无人机,ωi为水平面上第i架无人机水平速度矢量与惯性坐标系X 轴的夹角度数,hi为第i架无人机的飞行高度,为第i架无人机的速度向量。
式(2)(3)中Pi和Pj分别表示集群中第i架和第j架无人机为无人机Ni在障碍物上的投影位置。
针对无人机个体通信与感知范围内的速度计算方式,将各无人机速度分量拆分成内部避碰、速度对齐、避障和自推进四个分量[13],下面给出各部分的速度计算模型。
(1)内部避碰分量模型
对于任意第i架无人机Ni的感知范围Rc内的其他无人机对于Ni都有一个作用半径为rrep的相互排斥力来保证无人机集群不发生内部碰撞。由此建立分布式集群避碰的速度分量计算公式:
式(4)中prep是排斥力线性增益,rij=| |ri-rj||是无人机Ni和无人机Nj之间的位置差范数。当集群内机间距离小于作用半径时,即rij<rrep时内部避碰分量计算公式如式(4)所示,当rij≥rrep时无人机机间内部避碰分量忽略不计。
(2)速度对齐分量模型
通过设计一种负反馈调节的速度分量,可以使集群中各无人机的速度具有随速度计算公式迭代而统一的趋势,具体计算公式如式(5):
式(5)中vij表示无人机i与无人机j的速度差表示速度对齐分量用于计算速度对齐误差最大值,dpros表示无人机之间预期距离,Cfrict是速度对齐线性增益,vfrict是速度对齐容许误差。当集群内机间距离大于作用半径时速度对其分量计算公式如式(5)所示,其余情况下速度对其分量忽略不计。africt为首选加速度,pfrict用来决定两个减速阶段交叉点的线性增益,D(·)是为了速度在两个状态之间平滑转化设计的衰减函数,计算公式如式(6):
式(6)中,r是无人机和预期停止点之间的距离,a是首选加速度,p用来决定两个减速阶段交叉点的线性增益。当r< 0时,D(·) 为0;当0 <rp<a/p时,D(·)计算公式为rp;其余情况下D(·)计算公式为
(3)避障分量模型
采用与速度对齐分量相似的方式计算避障分量。假设障碍物为虚拟无人机,通过使无人机与虚拟无人机速度对齐的方式来实现障碍规避。定义虚拟无人机的位置向量速度向量则避障速度分量计算如式(7):
式(7)中函数D(·)计算公式与式(6)相同是无人机与虚拟无人机之间的位置差范数,是无人机与虚拟无人机之间的速度差范数。与速度对齐公式不同的是,虚拟无人机不存在速度容许误差。当无人机与障碍物距离大于作用半径时内部避碰速度分量如式(7)计算,其余情况下内部避碰速度分量忽略不计。
(4)自推进分量模型
在无人机速度为零时,集群模型会陷入局部最优解导致集群失效。因此,在速度计算分量中加入保持当前速度飞行的自推进项,并设置参数viner来控制其大小。
(5)多无人机分布式集群模型
对以上四种分量合成可以建立多无人机分布式集群模型。集群中第i架无人机速度计算公式如式(8):
式(8)中αrep、αfrict、αobst、αiner是各速度分量的权重。基于各无人机的速度计算公式,可以设计出无人机分布式集群控制策略:
随着算法迭代次数的增加,无人机群逐渐形成机间距离稳定、机间速度一致且具有自主避障功能的分布式集群系统。
与传统无人机分布式集群模型相比,上述无人机分布式集群模型省去了使无人机相互靠拢的内聚作用。这种方式解决了无人机之间引力和斥力相互作用形成的系统振荡,但也造成新的缺点:外部干扰下的集群的发散问题。无人机的速度是由自身当前速度、感知范围内其他无人机速度以及障碍物的影响共同决定的,在其遇到较复杂的外部干扰时无人机的速度会产生较大的随机量,导致原本聚集的无人机群分散。为了解决这一缺点,本文提出一种无人机集群运动一致性的群体熵度量理论,通过建立群体运动行为稳定程度的熵度量函数,并将其作为个体之间协同运动的适应度值指标,实现复杂环境下无人机集群运动一致性的自适应调节。
2 基于群体熵度量的无人机集群模型
2.1 适应度值交互机制
在无人机分布式集群模型的速度对齐分量中,无人机Ni的速度计算受到其通信范围内感知到的所有其他无人机Nj的速度平均影响,根据与中心无人机Ni的实际距离来调节影响权重。因此本文改进速度对齐计算方式,将适应度值转化为速度对齐分量中各无人机影响权重。通过制定合理的适应度值计算方式,无人机在集群过程中可以自主学习周围临近无人机的行为,并选择适应度值高的临近无人机作为主要学习目标。
在构建的无人机分布式集群模型中,最能体现集群中无人机之间相互影响作用的是速度对齐部分,即相邻的无人机之间互相速度融合,最终方向大小相同的趋势。速度一致的结果是无人机会保持集群的阵型,但集群整体飞行的方向具有较大的随机性,并且在外部噪声干扰下波动较大,其原因在于每一架无人机的速度是由其感知范围内其他所有临近无人机共同影响的,每架临近无人机的影响权重相同。在集群算法迭代过程中,对速度对齐计算结果产生主要影响的是无人机之间的速度差值,即无人机速度会趋向于其感知范围内速度差值较大的无人机。因此无人机集群速度会趋向于速度较大的个体,且很容易被外部噪声扰动,难以保持集群运动的一致性。
为了实现无人机集群运动一致性,速度对齐部分加入各Nj对Ni的影响权重pfitness,改进后的速度对齐公式如式(10)所示:
即在速度的整体合成公式中,参数Cconver的引入可以使各无人机Nj对无人机Ni影响权重改变的情况下,在数值上保证速度对齐分量不会因为叠加而产生明显得增大或减小,算法的改进仅对无人机飞行速度方向的选择产生影响,从而保证集群中各无人机运动速度趋于一致。
2.2 运动一致性的群体熵度量
随着信息论、控制论的发展,近年来熵的概念逐渐被引入多智能体系统的评估,用来表述系统的混乱无序程度。熵增表示系统向混乱无序状态演化的趋势,熵减表示系统向和谐有序状态演化的趋势。参考罗杰等[7]提出的群体智能系统群体熵度量理论,群体熵定义为系统结构熵与个体相互作用信息熵的复合函数:
式(13)中,G为反映个体构型瞬态熵的演化函数,F为反映系统整体协同关联水平过程熵的演化函数,F◦G为函数F与G的复合运算,ln[ Ξ ]为某时刻群体行为中个体的统计学意义熵。
复杂环境中无人机集群飞行时,需要不断改变飞行方向以实现障碍物穿越,随着时间变化,集群中各架无人机的运动一致性逐步下降。无人机集群的运动一致性难以直接评估计量,而集群运动中无人机的速度样本是运动一致性的外在表现形式,是一种可以实际测量、控制的变量。因此考虑基于各架无人机速度样本建立群体熵度量体系,从而对无人机集群系统在复杂飞行环境中的运动一致性水平进行调控。
将式(13)具体化为无人机集群的局部速度熵,为2.1 节中速度对齐计算公式选取一种合理的影响权重参数在式(2)中给出了的定义,基于可以使用无人机的通讯范围Rc将集群划分为K个不同的群组,且群组的划分是根据时间而变化的。对于每一架无人机Ni,在其感知范围内的每一架Nj都有以其为中心的群组。定义在t时刻以Nj为中心的子群为对于群组内各无人机的速度而言,速度相差较大的情况对应群组的熵较大,而速度相差较小的情况对应群组的熵较小。在预期的无人机分布式集群系统中,各无人机速度差应控制在一个较小的容许范围vfrict内,即群组的熵应控制在一个较小的范围内。本文通过使无人机集群向着速度相差减小的趋势迭代飞行速度参数,实现各群组局部速度熵减,从而保证无人机集群的鲁棒性。
本文使用速度样本的方差来描述各群组内无人机速度的差异程度。将无人机集群中的一个群组中各无人机的速度视作一组数据样本其方差为随着算法的迭代,希望无人机向着熵减的趋势集群,即集群中无人机速度会趋于一致,速度样本的方差呈递减状态,满足式(14):
在无人机集群的过程中,系统是向着熵减的趋势进行迭代优化。在算法迭代过程中,加大速度差异较小的群组QNj对群组QNi的影响权重,因此选用熵的倒数作为各无人机之间交互的适应度值,即
总结2.1 节和2.2 节中的工作,改进后的无人机集群模型中速度对齐公式如式(17)所示:
针对复杂环境下无人机集群运动一致性的群体熵度量,通过对集群模型中速度对齐算法的改进,实现对集群过程中无人机对周围子群影响权重的自适应调控,保证无人机集群运动的一致性。
3 仿真实验分析
以往无人机分布式集群算法的研究工作大多局限于模型的建立,从而忽视了算法在现实飞行环境下的实际应用能力。因此本文进行了两方面的工作,从理论层面到实践层面证明了算法的可行性。第一部分是算法验证实验,搭建了二维的算法程序,从而验证无人机通过迭代计算可以形成稳定的集群规模。第二部分是物理仿真实验,在物理仿真软件Gazebo 中搭建了四旋翼无人机动力学模型,并通过复杂飞行环境下的两组实验对比证明改进后的模型使无人机集群具有更高的运动一致性。
3.1 算法验证实验
实验中使用具有两个维度方向的粒子来代表垂直方向速度固定、水平方向速度随算法迭代改变的无人机,通过在Matlab 中进行二维实验初步验证算法的可行性。实验中设置的无人机参数如表1 所示。
通过这一部分的实验,希望证明改进后的集群算法具有更高的稳定性。因此,进行了加入熵度量适应度值的无人机群和不加入熵度量适应度值的无人机群对比实验。实验流程如下:
(1)无人机的生成与初始化。在边长为10 m 的正方形区域内随机位置生成无人机。给这些无人机赋予了初始速度,旨在保证集群算法不会因为初值为零而失效的同时,探究一个混乱的无人机集群系统能否保持运动一致性。因此,生成的无人机具备的参数有:初始位置、速度、通讯范围。无人机群的生成如图1所示,图中横纵坐标为实际单位的等比缩放。

图1 无人机初始化生成图Fig.1 UAV initialization generation chart
(2)改进前集群算法验证。为了模拟真实的通讯受限环境,将无人机的通讯范围设置在一个合理的范围内,使其只能感知到周围小范围内的其他无人机,而不能感知到地图内所有其他无人机。同时为了验证算法的改进之处对于集群稳定性的提升,将外部干扰设置为一个较大的随机噪声,用于模拟复杂飞行环境对于集群的影响。进行了100 组重复实验,每组实验进行50 次算法迭代。统计数据发现,在100 次重复实验中有86 次明显形成了集群,但其中的69 次在经过强外部干扰的算法迭代后集群发生了分散,如图2 所示,图中横纵坐标为实际单位的等比缩放。通过数据还发现,大部分初始化无人机群在第15~20 次迭代后形成明显的集群。
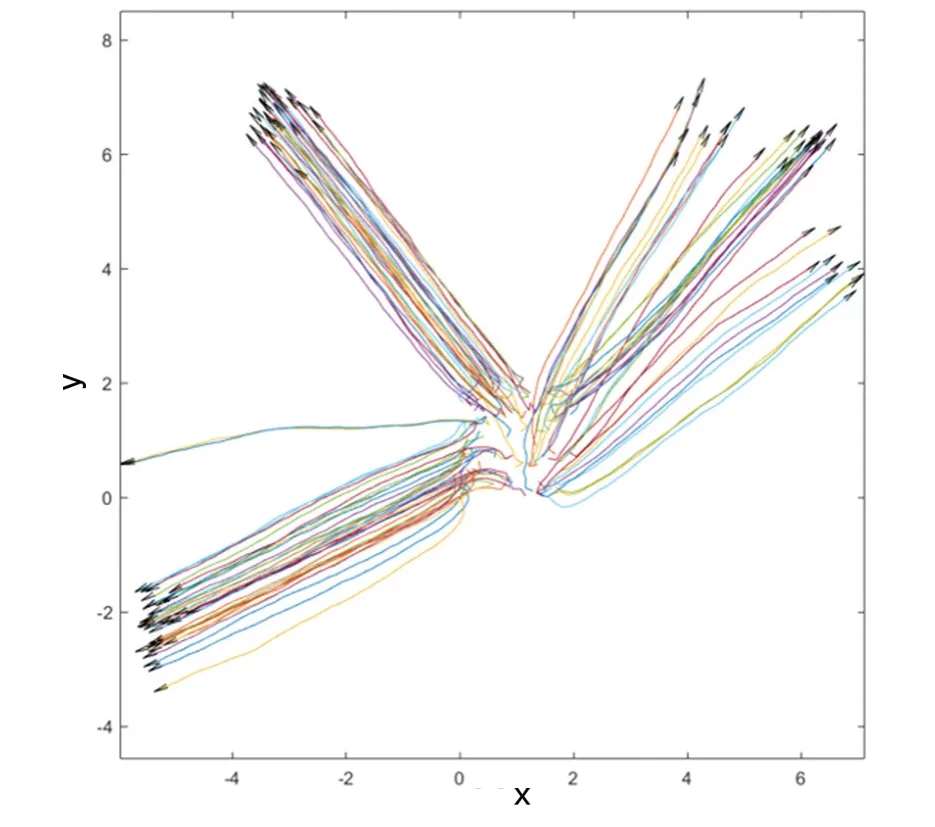
图2 强外部干扰影响下的无人机集群发散Fig.2 UAV cluster dispersion under the influence of strong external disturbances
(3)改进后的算法验证。在这一步实验中,无人机在算法迭代的过程中会进行熵度量适应度值的计算和交互,其余参数设置与上一步实验相同。同样进行了100 组重复实验,每组实验进行50 次算法迭代。统计数据后发现,100 组实验全部形成了稳定的集群,且经过高噪声的算法迭代集群都可以保持稳定,如图3所示,图中横纵坐标为实际单位的等比缩放。这一部分的实验大部分在第10~15 次迭代后就形成了明显的集群。由此可以看出,引入群体熵度量的算法对于集群运动一致性提升明显,集群运动收敛速度提升30%左右。
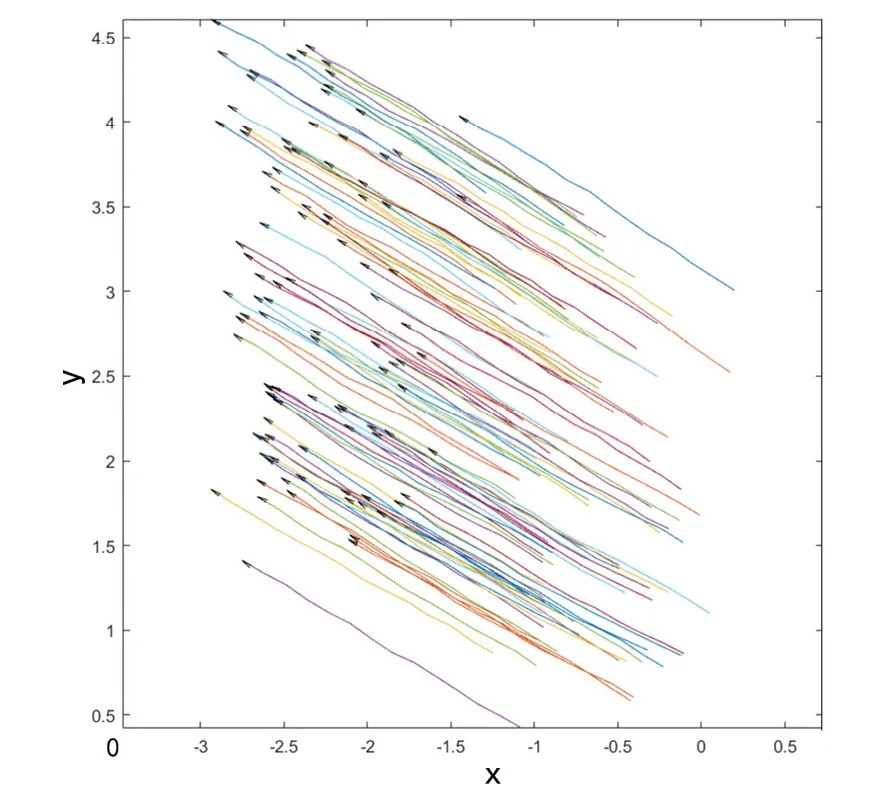
图3 强外部干扰情况下无人机集群保持稳定Fig.3 Stabilization of UAV clusters in the presence of strong external interference
通过上面两部分对比试验,可以看出随机生成的无人机群基本都在20 次迭代后进入稳定状态,因此分别统计两部分实验前20 次迭代的无人机样本熵值方差,绘制折线图如图4 所示。

图4 改进前后算法中无人机样本熵值方差变化图定Fig.4 Plotting the change in entropy variance of UAV samples in the algorithm before and after improvement

图5 两种控制方式响应速度对比图Fig.5 Comparison of the response speed of the two control methods
通过图4 中数据对比可以看出,两次实验中的速度样本熵值方差总体均成递减趋势,即改进前后算法均可以使随机生成的无人机形成集群。但使用改进前算法计算出的样本熵值方差经过20 次迭代不具备趋于0 的趋势,即无人机集群在高噪声的迭代过程中发生了扩散,并且熵值方差在噪声的影响下呈上下波动趋势。使用改进后算法计算出的样本熵值方差经过20次迭代呈现趋于0 的趋势,即无人机集群在高噪声的迭代过程中能够保持稳定,并且熵值方差在噪声的影响下仍呈现递减趋势。
通过对比实验可以看出,算法的改进对于受限环境下的多无人机集群稳定性有着显著性提升,且集群形成所需要的算法迭代次数更少,系统收敛速度更快。
3.2 物理仿真实验
第一部分的实验初步验证了改进后算法的可行性和优越性,但简化的二维无人机个体仅具备两个方向的速度,相比于真实无人机缺乏了很多物理必需的参数。因此,为了证明改进后的算法能够应用于真实无人机集群系统,本文在Gazebo 物理仿真环境中搭建四旋翼无人机模型和复杂飞行地图,进行无人机集群物理仿真实验。在实验过程中无人机控制方式选择方面,进行了速度控制和加速度控制的数据对比。如图 5所示,相比于加速度控制,速度控制具有更高的响应速度和更小的稳态误差,因此实验过程中采用速度控制无人机飞行。
在3.1 节的实验中,通过限制无人机的感知范围,来模拟真实飞行条件下无人机受限的通讯,但外部干扰是通过在速度上叠加随机噪声来实现的。在物理仿真实验中,构建复杂的飞行地图来体现外部干扰,具体表现为繁多且庞大的障碍物,以及较大的风阻。分别对算法改进前后的两组无人机群进行了编队避障飞行实验,如图6 所示。
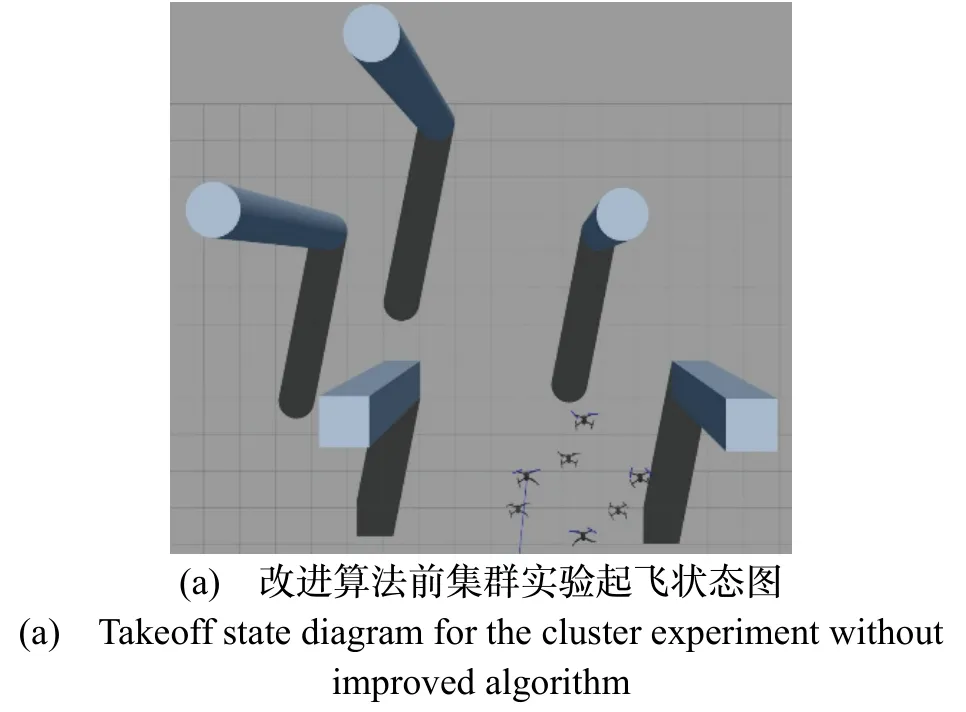
图6 Gazebo 物理引擎仿真实验Fig.6 Gazebo Physics Engine Simulation Experiment
图6 为在Gazebo 仿真环境中进行的算法改进对比实验。由于系统熵值是在时刻计算迭代的,为了展现整个实验过程中系统熵值的变化趋势,选取实验中起始状态、第一次避障、第二次避障以及穿过障碍物后最终状态四个熵值变化较大的时间节点作为关键节点。图6(a)(b)(c)(d)为改进前算法四架无人机集群仿真实验,图6(e)(f)(g)(h)为改进后算法四架无人机集群仿真。通过两组实验对比可以看出,改进前的无人机集群在穿越密集障碍物时发生明显的分裂,运动一致性降低;而改进后的无人机集群在穿越密集障碍物后仍保持集群收敛,集群运动一致性提升明显。将两次实验中无人机集群在四个关键节点的个体熵值和系统熵值绘制成折线图,如图7、图8 所示。
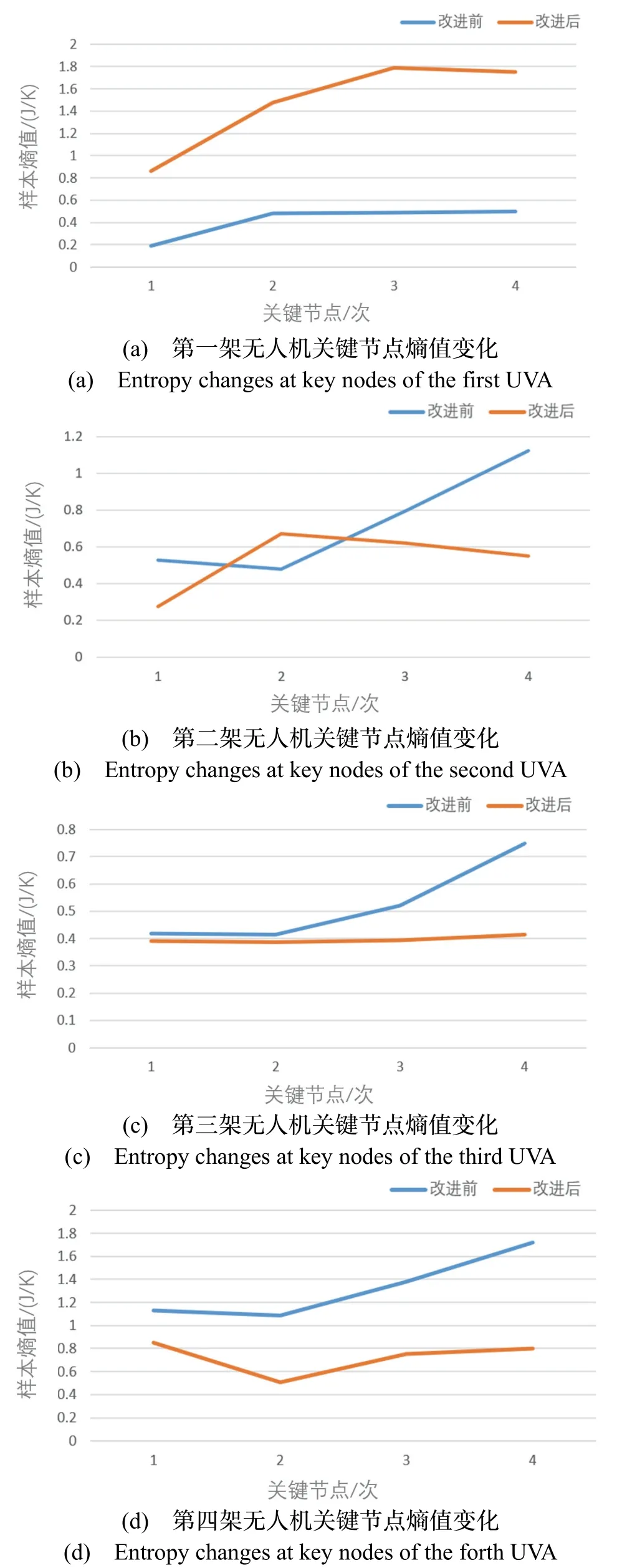
图7 四架无人机两次实验熵值变化Fig.7 Entropy change for two experiments with four UVAs
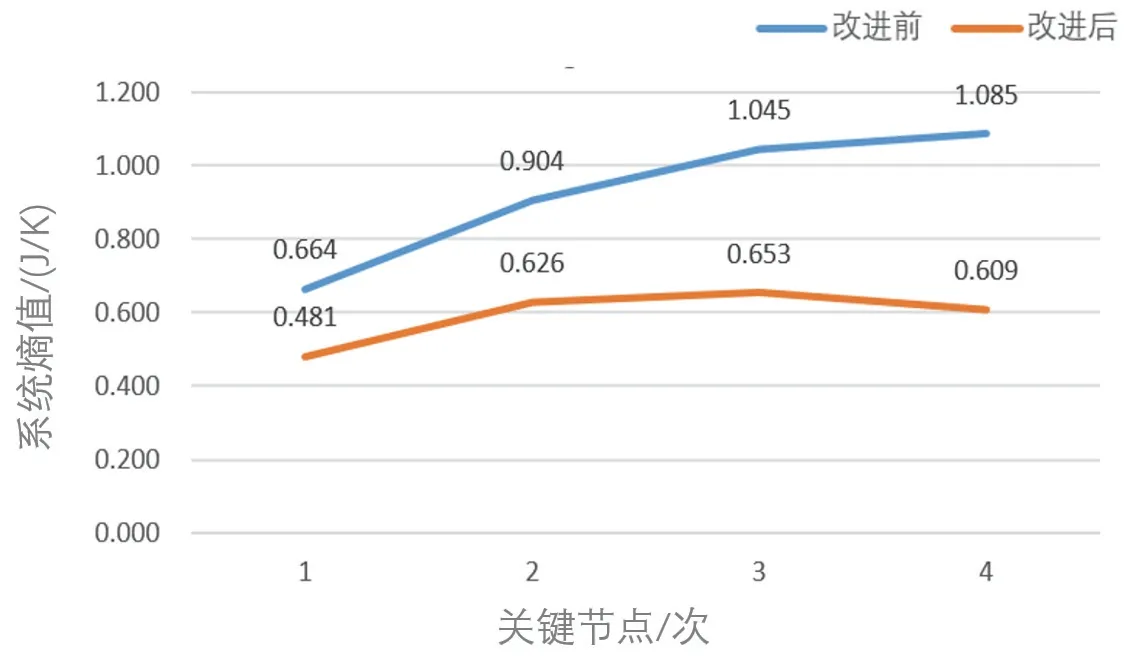
图8 两次实验无人机集群系统熵值变化Fig.8 Entropy changes of UAV cluster system for two experiments
通过图7 中数据对比可以看出,除第一架飞机外,算法改进后无人机个体熵值基本较改进前低,且均可以在熵增之后自适应调节至熵减状态,即每架飞机在复杂飞行环境中均可趋于稳定状态自适应调节。
通过图8 中数据对比可以看出,两次实验在四个关键节点处的熵值总体呈上升趋势。但改进前的实验中系统熵值整体一直呈递增的趋势,即无人机集群系统的稳定性逐步下降,系统熵值平均值为0.925,实验过程中熵值波动范围在63.4%内;而改进后的实验中系统熵值虽在避障过程中呈上升趋势,但总体水平较改进前明显降低,在避障结束后呈下降趋势。无人机集群系统在飞行过程中稳定性水平较改进前整体提升,能够根据复杂变化的飞行约束自适应调节,保持无人机集群运动一致性;系统熵值平均值为0.587,熵值波动范围在41.6%内,即引入群体熵度量的无人机集群运动一致性提升了21.8%。
通过两组实验的对比,可以看出无人机在使用改进前算法进行集群时,在遇到障碍物时由于机间引力的缺失,会采取分散绕过的方式通过;这也导致经历多次避障后,个别无人机可能会由于距离的扩散而丢失通讯,从而导致集群的分散。无人机在使用改进后算法进行集群时,采用熵度量的方式弥补了机间引力缺失导致的缺点,能够在多次避障后仍保持稳定集群,提高了无人机集群运动一致性。
4 结论
针对复杂飞行环境中无人机稳定集群问题,本文提出一种无人机集群运动一致性的群体熵度量理论,通过建立群体运动行为稳定程度的熵度量函数,并在无人机分布式集群模型中引入适应度值交互机制,将其作为个体之间协同运动的适应度值指标,实现复杂环境下无人机集群运动一致性的自适应调节。在此基础上进行了Matlab 算法仿真、Gazebo 物理引擎仿真两步实验,验证了群体熵度量对于复杂环境下无人机集群运动的有效性。
