基于空间目标异步观测的惯导误差快速确定
2024-02-16杨静,王栋,熊凯
杨 静,王 栋,熊 凯
(1.北京航空航天大学 自动化科学与电气工程学院,北京 100191;2.北京控制工程研究所 空间智能控制技术重点实验室,北京 100094)
惯性导航系统自主性、抗干扰性较强且导航信息完整,但导航误差随时间积累[1]。作为一种重要的天文导航敏感器,星相机可以同时对恒星以及具有一定亮度和轨道先验信息的空间目标如人造卫星等进行照相观测[2],通过星图匹配与图像处理提取恒星的星光矢量以及恒星与空间目标的角距,进而还可以采用轴系定位法或天文定位法得到空间目标的方向矢量,将其作为空间基准信息源可以辅助校正惯导解算误差,以满足高精度长航时的自主导航定位需求[3]。
由于星相机成像曝光以及星图和目标的识别处理需要消耗一定的时间[4],并且可观测恒星和空间目标的数量与光学镜头的视场角大小、探测灵敏度等性能指标以及被观测对象的分布和运动特性密切相关,导致基于照相观测星相机的天文导航系统的数据更新率较低[5]。此外,星相机提供的是与载体位置间接相关的测量信息,而对载体速度的可观性弱,速度误差难以被有效地估计出来。如何有效利用数量和精度有限的测量信息,实现对惯导误差参数的快速、准确估计是目前需要解决的问题。
目前,常用的惯导误差估计方法分为两类:基于状态估计的方法和基于参数估计的方法。其中,基于状态估计的方法包括卡尔曼滤波[6]、扩展卡尔曼滤波[7,8]、无迹卡尔曼滤波[9-11]、容积卡尔曼滤波[12,13]等方法。文献[14]采用标准卡尔曼滤波器融合里程计、星敏感器和惯性器件的测量信息,实现动态的初始对准和误差校正。文献[15]和文献[16]将待估误差项扩维到状态向量中,然后采用不同的自适应容积卡尔曼滤波算法在线递推估计导航误差参数。文献[17]提出一种确定月球探测车初始位置和姿态以及惯性器件误差的方法,在月球车保持静止时利用恒星高度角、星光矢量以及水平速度误差建立测量模型,再采用无迹卡尔曼滤波算法估计并校正惯导误差。在以上基于状态估计的方法中,往往被估误差参数需要一定的时间才能稳定收敛,并且当初始误差参数较大时可能导致滤波收敛时间增长,严重情况下甚至可能造成滤波发散,进而难以快速有效地实现对误差参数的准确估计与补偿。此外,基于状态估计方法的估计精度还依赖于系统模型及噪声统计特性的准确程度。
在进行参数估计时,最小二乘是广泛应用的准则之一。当待估参数与系统测量建立的是线性模型时,即可用线性最小二乘法获得误差参数的估计值,该方法无需测量噪声先验信息,实现简单,快速性较好[18];当待估参数与系统测量是非线性关系时,可以基于最小二乘准则建立关于待估参数的非线性优化模型,通常采用高斯-牛顿[19](Gauss Newton,GN)、列文伯格-马夸尔特[20](Levenberg-Marquardt,LM)等非线性优化方法进行迭代求解,以保证参数估计的精度。
在导弹、高超声速飞行器等应用平台,高速高动态特征将造成严重的气动光学效应,同时由于受到光学镜头观测视野的限制,获得的有效天文测量信息有限。针对大的初始位置和速度误差影响组合导航估计误差收敛速度,严重者甚至导致滤波发散的问题,本文结合异步测量同步处理思想,提出一种非线性最小二乘优化方法,通过融合有限的空间目标观测信息快速确定惯导误差参数。
1 模型建立
1.1 系统状态方程
由于初始导航参数误差、加速度计偏置、陀螺漂移等误差的存在,惯导解算中的积分运算将使导航误差随时间不断积累增大。通常,建立惯导小误差方程来描述载体状态误差和惯性器件主要误差分量的动态变化情况,并可用于实现对误差状态的递推估计。
在发射点惯性系(简称发惯系)下采用导航状态误差和惯性器件的主要误差分量构成导航系统的状态向量为:
其中,ϕ为平台误差角向量为速度误差向量,上标li表示发惯系,下标c表示载体坐标系为位置误差向量;ε为三轴陀螺常值漂移误差向量;∇为三轴加速度计常值偏置误差向量;上标T 表示转置。将天文/惯性组合导航系统的状态方程表示为:
其中,t为时间;F(t)为系统状态矩阵;G(t)为噪声因数矩阵;W(t)为系统噪声。
将式(2)离散化可得:
其中,下标k对应当前时间tk;wk,k-1为G(t)W(t)离散化后的过程噪声;Φk|k-1表示从tk-1到tk的状态转移矩阵,即Φk|k-1=Φ(tk,tk-1),可以按照式(4)计算得到。
其中,T为离散周期。
通过式(3)可以建立不同时刻系统状态之间的转换关系,并利用惯性传感器测量的角速度和加速度进行惯导解算。在此基础上,根据式(5)将k-1时刻的状态估计值利用状态转移矩阵递推得到k时刻的状态估计值以完成时间更新。
其中,上标“^”表示估计值。
1.2 优化模型
构建准确的测量模型以有效利用测量信息是提升状态估计精度的一种重要途径。在基于照相观测星相机的天文/惯性组合导航系统中,关于空间目标的可用测量信息主要有两种:视线方向矢量测量以及与恒星间的角距测量。天文观测示意图如图1 所示,在工作过程中,星相机同时对至少一颗空间目标和若干颗背景恒星进行照相观测,通过星图识别可获得恒星矢量以及空间目标的视线方向矢量,进而得到两者之间的角距。
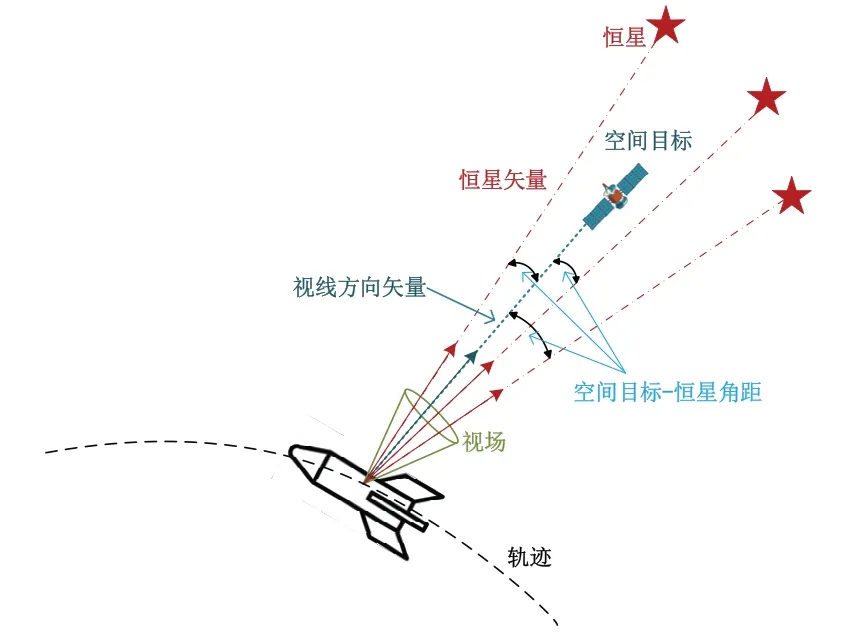
图1 天文观测示意图Fig.1 Schematic diagram of celestial observation
目标视线方向矢量测量提供的是与载体位置直接相关的信息,信息利用率较高,据此建立的测量模型非线性度较小,但基于传统轴系定位法提取的目标方向矢量难以避免星相机轴扰动误差的影响,而坐标系转换的过程还会引入安装误差的影响。因此,当星相机存在较大的安装误差和光轴扰动误差时,基于目标视线方向矢量的测量模型精度有限。与之相比,基于角距的测量模型非线性度较高,但是由于角距信息不依赖于坐标系,故采用基于角距建立测量模型的方式可以有效避免星相机轴扰动和安装误差的影响。
通常情况下,星相机视野中有足够数量的可观测恒星,对其进行照相观测可以提取较高精度的载体姿态四元数,以辅助校正惯导姿态误差,因此,基于卡尔曼滤波的状态估计方法可对姿态误差进行较准确的估计与补偿,并且由于有关载体姿态的测量信息(恒星矢量)比较充足,即使在较大的初始姿态误差下,对应姿态误差分量的滤波估计也可以快速收敛,无需在初始误差确定阶段对载体姿态误差进行优化与补偿。
由于空间目标的数量和分布空间的限制,通常情况下星相机仅能观测到一颗可观性较好的目标。此外,通过观测空间目标得到的测量信息仅与载体位置间接相关,与载体速度无法建立函数关系。如果直接采用滤波方案对载体位置和速度误差进行估计,通常需要一定时间才能稳定收敛,并且当初始位置和速度误差参数较大时可能导致滤波收敛时间增长,严重情况下甚至可能造成滤波发散。因此,本文根据空间目标与恒星之间角距的测量模型,以导航位置和速度误差为待估参数,基于异步角距测量建立优化模型,通过非线性最小二乘方法迭代求解惯导初始误差,以保证后续滤波方案的快速收敛。
建立待优化的目标函数F为:
其中,mi为tk-i时刻测量得到的恒星矢量与空间目标方向矢量之间的角距数目;tks为启动照相观测获取角距测量辅助导航误差确定的起始时刻;tk为结束时刻;tj为待估计的导航误差所对应的时刻,该时刻的导航误差将被用来对所有异步测量进行时间对准的处理,j∈[ks,k];ξk-i表示tk-i时刻是否获取有效照相观测的指示变量,ξk-i=1时为存在有效观测,否则ξk-i=0;αg(tk-i)为星相机在tk-i时刻测量得到的空间目标与第g颗观测恒星之间的角距,即:
其中,Sg(tk-i)为tk-i时刻第g颗观测恒星的星光方向矢量;L(tk-i)为tk-i时刻空间目标的方向矢量;εα为角距测量误差。表示根据tj时刻的惯导误差向量解算得到的tk-i时刻第g颗观测恒星矢量和空间目标矢量间的角距估计值,下标ins表示该参数估计值是根据惯导解算结果计算得到的。具体计算方法如下:
1)将tj时刻的惯导误差向量X(tj)经过状态转移得到tk-i时刻的X(tk-i|tj);
4)在发惯系下,计算角距估计值:
其中,右上标i表示地心惯性坐标系为从地心惯性坐标系到发惯系的转换矩阵,由载体发射点的初始经度λ0和初始纬度L0计算得到。
由式(3)可推导出tk-i和tj时刻的状态向量满足:
其中,上标ϕ、v、p、ε、∇分别表示中与平台误差角、速度、位置、陀螺漂移和加速度计零偏对应的分量。
根据式(11)和式(12),进一步推导出由tj时刻的状态向量Xj得到tk-i时刻位置误差估计为:
式(13)给出了由Xj的各个状态分量以及系统噪声解析表示的,据此可以建立描述与空间目标的多个异步观测时刻相对应的位置误差与待估计tj时刻的导航误差之间关系的模型。
在忽略各个状态分量之间相关性的前提下,由式(14)可得各分量协方差阵之间的关系。
其中,P·(tj)表示tj时刻物理量(·)的协方差阵;Q(tj,tk-i)表示由tj时刻到tk-i时刻的过程噪声协方差阵。
由于在确定误差的短时段内,小的姿态误差和器件误差对系统的影响有限,而且期间获取的角距信息也难以提供足够的信息对这些误差分量进行有效估计,因此,在初始阶段仅考虑将主要导航误差分量作为待确定参数θj,其他分量均作为等效模型误差进行处理。利用式(10)建立之间的关系,并将其代入式(6)建立非线性的优化模型。通过优化求解该模型可得参数估计值为:
2 高斯牛顿法
当目标函数是非线性最小二乘问题时,可以采用GN、LM 等非线性优化方法进行求解。与传统牛顿法相比,GN 算法利用目标函数的一阶泰勒展开项近似其二阶泰勒展开项,通过计算拟海塞矩阵降低了计算量,但当系数矩阵奇异或病态时存在增量不稳定甚至算法不收敛的问题。LM 算法通过引入信赖域在一定程度上解决了系数矩阵的奇异和病态问题,但算法的收敛速度较慢。
由于本文建立的优化模型具有较好的性质,通过合理设计空间目标的观测方式可以避免出现系数矩阵奇异或病态问题,因此,采用GN 算法来实现优化模型的快速求解。
下面给出GN 算法的实现流程:
1)设置迭代初始值x0;
2)对于第i次迭代,计算雅克比矩阵J(xi)以及目标函数f(xi),求解增量方程得到增量Δxi:
3)如果Δxi小于增量阈值则停止迭代,否则更新迭代值:
4)如果已到达最大迭代次数或者目标函数值小于阈值则停止迭代,否则返回步骤2)。
3 基于角距异步观测的惯导误差快速确定方法
本小节详细介绍本文方法各模块的实现流程。
3.1 空间目标异步测量信息的采集
为了保证误差参数估计的有效性以及快速性,在天文导航启动初期,依靠载体姿态机动或通过旋转星相机安装平台的方式改变星相机光轴的方位角,使其指向不同范围的天区以保证待估参数具有较好的可观测度,并且在同一指向下星相机以较高的频率对视野内的空间目标和恒星连续进行多次观测以获取充足的异步观测信息。
考虑到星相机的指向次数越多,导航误差的传播时间越长,异步测量信息的有效性下降,本文将光轴的指向次数设置为两次,下面给出异步测量采集的具体实现方式:
1)设置同一指向下高频观测频率以及观测次数。
2)天文导航启动后,在星相机光轴的第一个指向下,以预设的观测频率对视野内的空间目标和恒星连续进行多次观测,通过成像曝光和星图识别等过程获得恒星的星光矢量和目标卫星的视线方向矢量,进而得到恒星和目标卫星之间的角距测量信息,并记录每个观测时刻时间更新过程中状态转移阵的变化。
3)依靠载体姿态机动或通过旋转星相机安装平台的方式改变星相机的光轴指向。如果依靠载体的姿态机动来改变光轴指向,则光轴转角的大小取决于载体姿态机动的大小;如果通过旋转星相机安装平台的方式改变光轴指向,光轴转角可以设置在40 °~80 °范围内,使得观测信息尽可能对状态形成较好的几何约束。
4)在星相机光轴的第二个指向下,以预设的观测频率对视野内的空间目标和恒星连续进行多次观测,采集空间目标角距测量信息并记录每个观测时刻时间更新过程中状态转移阵的变化。
综上,观测信息采集处理的时间示意图如图2 所示。其中,Δt1为相邻两次惯导解算之间的时间间隔;Δt2为相邻两次时间更新之间的时间间隔;Δt3为同一指向下相邻两次天文观测的时间间隔;Δt4为星相机光轴改变指向的时间间隔。Δt2=n1Δt1,Δt3=n2Δt2,Δt4=n3Δt3,n1、n2、n3∈N+,N+表示正整数。
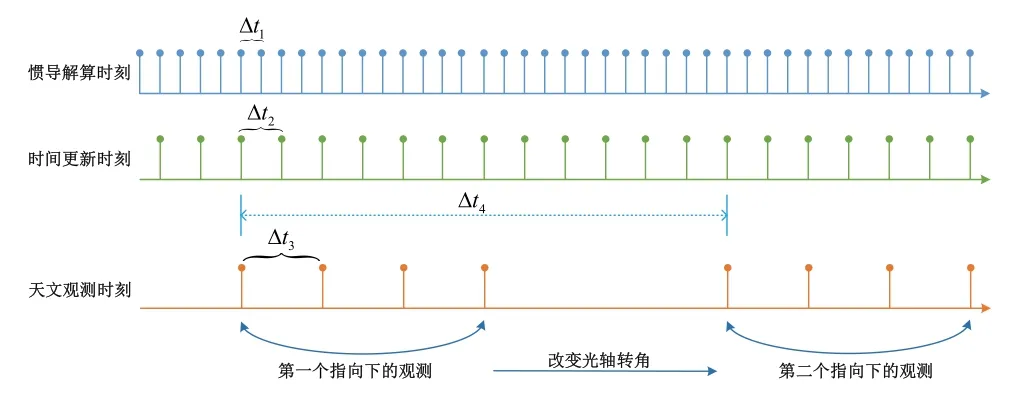
图2 观测信息采集处理时间示意图Fig.2 Schematic diagram of time for observation information acquisition and processing
3.2 基于GN 算法的优化模型求解
考虑到大的初始位置误差会导致较大的线性化误差,进而对模型线性化和观测同步处理过程产生严重影响。同时,还要避免不准确的速度误差估计对位置估计精度的影响,因此,采用了两轮优化的求解方案。
在第一轮优化求解过程中,仅以位置误差作为待估参数建立优化模型,采用GN 算法迭代计算出位置误差估计值;在第二轮优化求解时,利用第一轮估计结果修正位置误差,并建立以残余位置误差和速度误差作为待估参数的优化模型,从而对速度误差和残余位置误差进行同步求解。采用经过两轮估计得到的位置误差和速度误差对惯导误差进行修正,进而可以为后续的惯导解算或组合导航提供更准确的数据初值。算法的总体结构图如图3 所示。

图3 算法总体结构图Fig.3 The overall structure diagram of the algorithm
下面给出两轮优化求解的具体流程。
1)第一轮优化
建立以位置误差为待估参数的优化模型,即待估参数向量θj由tj时刻的位置误差构成。由式(13)可得:
基于式(10)建立如式(15)所示的优化目标,然后用GN 算法对位置误差参数进行迭代估计,具体步骤为:
①设置导航误差参数的迭代初值θj,0、增量变化阈值 Δθj,min、目标函数阈值Fmin以及最大迭代步数
②如果当前迭代步数k′已达到最大迭代步数则停止迭代,否则进行步骤③;

tk-i时刻的惯导解算位置误差修正为:
根据式(9)和式(10)依次确定tk-i时刻空间目标的单位方向矢量以及其与第g颗观测恒星间的角距据此,计算第k′步迭代的目标函数值:
⑤计算第k′步迭代中的目标函数关于当前待估参数的雅克比矩阵
构造正规增量方程:
2)第二轮优化
为了进一步提高位置误差的估计精度,并且利用载体位置变化中隐含的速度信息,实现对速度误差的估计。以第一轮优化结果作为位置误差初值,建立以位置误差和速度误差为联合待估参数θj的优化模型。由式(13)可得:
将式(25)代入式(8),再依次代入式(9)和式(10),最终建立形如式(15)所示的优化模型,再采用与第一轮优化相同的方法进行处理。
4 可观测性分析方法
系统的可观测性是指在有限的时间区间内根据测量信息推断系统状态的能力。通过对系统状态的可观测性进行表征、判定以及量化评估,可以为系统状态的准确完备估计提供方向。Fisher 信息矩阵、可观测性矩阵的条件数和范数等均可以作为系统可观测性的量化指标。目前常用的可观测性分析方法包括基于估计误差方差阵的特征值特征向量分析法、基于Fisher信息矩阵的克拉美劳方差下界(Cramer-Rao Lower Bounds,CRLB)分析法、以及基于可观测性矩阵奇异值分解的分析方法。前两种方法仅适用于滤波框架下的可观测性分析,而本文是基于参数优化的思想确定惯导误差,因此采用基于可观测性矩阵奇异值分解的方法对误差可观测性分析。下面给出误差可观测性分析的具体实现过程。
由于仅对位置误差和速度误差进行优化,此处仅以发惯系下载体三维位置误差和三维速度误差构成六维状态向量X=[ ΔPΔV]T。在k时刻,空间目标与第i颗恒星之间的角距实际测量值记为i=1,2…ns,ns为可观恒星数量。空间目标与第i颗恒星之间的角距估计值为:
基于式(7)和式(26),建立测量模型为:
将式(5)和式(28)改写成离散线性系统模型的形式:
其中,状态向量Xk∈Rn;状态转移矩阵Φk,k-1∈Rn×n;测量向量Zk∈Rm;线性化后的测量阵Hk∈Rm×n;n=6为状态维数,m=ns为测量维数为包含线性化误差的测量噪声。
根据式(28),测量阵的具体形式为:
其中,L(· )为空间目标视线方向关于载体位置误差的非线性函数,具体形式见式(8)和式(9)。
由式(30)可知,仅利用当前k时刻的角距测量信息,测量阵是不满秩的,速度误差完全不可观测。根据分段线性化的分析方法,将所有的异步测量信息均表示为同步处理时刻状态Xk的函数:
系统的可观测性矩阵Ok可表示为:
由式(29)可知,在异步测量信息充足的情况下,通过状态转移矩阵的同步处理,Ok可以满足列满秩的可观性条件,即可以通过测量值对状态进行求解。如果可观测性矩阵是列满秩的,则k时刻系统是可观测的,可以将系统可观测度定义为:
其中,cond(· )表示求条件数。
当可观测性矩阵条件数较大时,说明其为病态矩阵,那么在相同测量误差条件下得到的状态估计误差较大,难以通过测量信息准确估计系统状态,系统可观性较差;反之,当Ok的条件数较小时,则系统的可观测度较好。
通过以上定义的可观测度仅能评估系统整体的可观测性,为了对每一维状态的可观测性进行分析,对可观测性矩阵进一步进行奇异值分解,再根据奇异值的大小进行分析。对于整个系统而言,奇异值越小则系统的可观测度越差。对于每一维状态而言,其所包含的最小奇异值在变量中所占成分越大,则该维状态的可观测度越差。
5 仿真实验与分析
5.1 仿真验证
以安装有星相机的高速运载体为仿真研究对象,采用天文/惯性组合导航方式,在载体助推段结束后启动星相机参与导航。天文测量精度为3 ″,星相机的观测频率为0.5 Hz,星相机安装误差和光轴扰动误差为3 ″,星相机的光轴与安装基座法向轴的夹角为20 °。在每个观测时刻识别一个空间目标和五颗背景恒星,在同一光轴指向下以10 Hz 连续观测10 次,相对基座改变光轴指向1 次。陀螺精度水平为0.02 °/h,加速度计精度水平为10 μg。根据先验信息获得的空间目标的位置精度为10 m。载体的初始位置误差为1000 m,初始速度误差为100 m/s。若无特殊说明,以上为后续实验中的缺省仿真参数。
在上述仿真条件下,进行50 次蒙特卡洛仿真。采用迭代后的位置剩余误差和速度剩余误差的均方根统计值作为评估本文方法性能的指标,本文将剩余误差定义为传播到最后一个测量时刻的导航误差与经迭代优化后估计的导航误差参数之差。
当最大迭代步数为10 步时,两轮优化过程中的目标函数值的收敛曲线分别如图4 和图5 所示,不同阶段下的导航误差统计结果见表1。由图4 可知,在以位置误差为待估参数的迭代优化过程中,目标函数值经过五步迭代后就趋于收敛。由图5 可知,在以位置误差和速度误差为联合待估参数的迭代优化过程中,目标函数经过两步迭代后就趋于收敛,这展现了高斯牛顿法具有快速收敛的优势,且将第一轮优化得到的结果作为第二轮优化的位置误差初值,加快了第二轮优化的收敛速度。

表1 不同阶段的导航误差Tab.1 Navigation errors under different stages
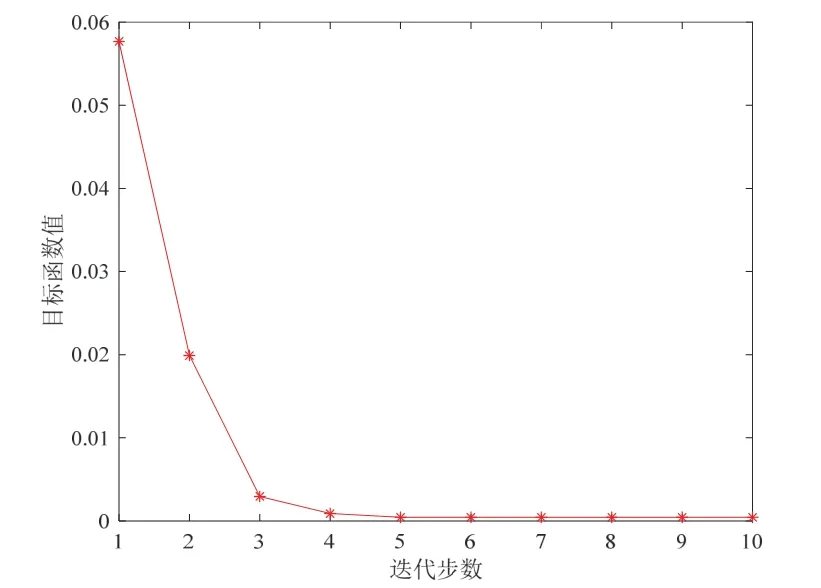
图4 第一轮优化过程中目标函数收敛曲线Fig.4 Objective function in the first round of optimization

图5 第二轮优化过程中目标函数收敛曲线Fig.5 Objective function in the second round of optimization
由表1 可知,在初始误差较大(位置误差为十千米量级)的情况下,本文方法可以补偿大约97.73%的初始位置误差以及66.25%的初始速度误差。在计算机配置为Intel i7-6700、安装系统为win7 版本、CPU 主频为3.40 GHZ 的条件下,优化求解误差参数的耗时为0.0160 s,这体现了所提方法具有一定的快速性。当同一指向下的观测次数降为四次时,优化求解误差参数的耗时降为0.0109 s,即异步测量信息数据量的减少有助于缩短求解误差参数的耗时。仿真统计结果表明,本文方法可以准确且快速地确定启动天文导航初期惯导解算的位置误差和速度误差,并且经过第二轮优化对速度误差的有效估计进一步提升了位置误差估计的准确程度。
5.2 误差可观测性分析
利用第3 小节给出的基于可观测性矩阵奇异值分解的分析方法,从误差可观测性角度验证本文方法的有效性。基于5.1 节的实验条件,分别在改变和固定星相机光轴指向情况下,将可观测性矩阵的秩以及可观测度随观测次数的变化情况统计在表2 中,并将经过奇异值分解后可观测性矩阵的奇异值和对应的右奇异向量直方图绘制在图6 和图7 中,用于对每一维状态误差的可观测性改善情况进行分析。按照对应右奇异向量的奇异值从大到小的顺序对各子图进行排列,图中σ为对应的奇异值,横坐标1~6 维依次对应x、y、z轴的位置误差和速度误差。

表2 不同观测方式下的可观测性分析Tab.2 Observability analysis under different observation modes

图6 固定指向情况下可观测性分析直方图Fig.6 Histogram of observability analysis under fixed direction
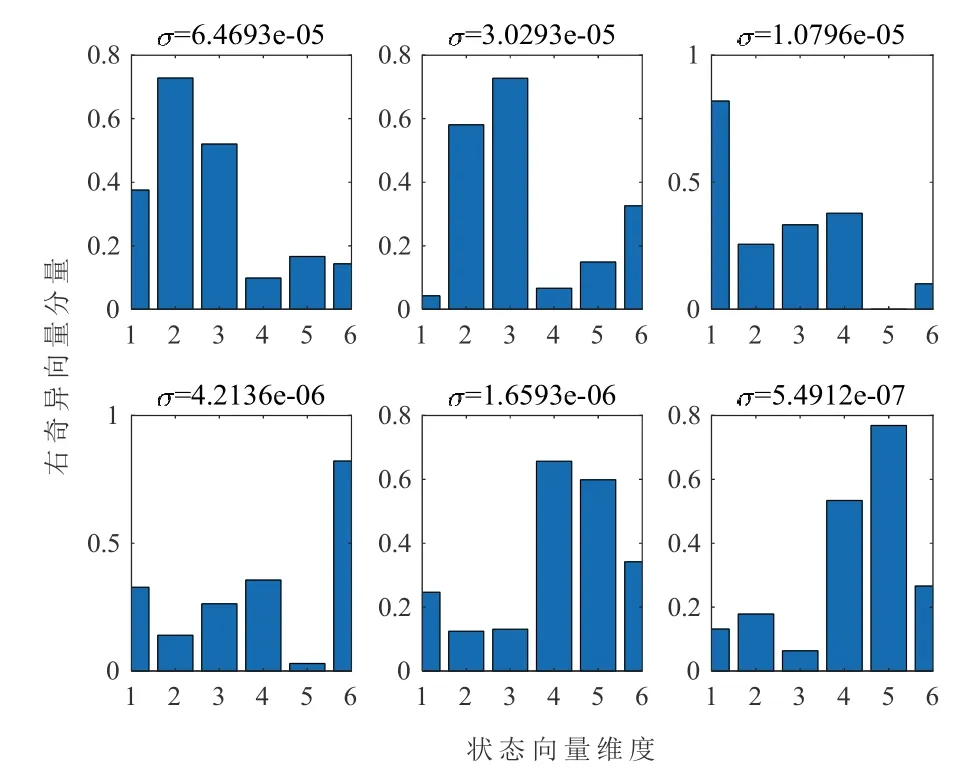
图7 改变指向情况下可观测性分析直方图Fig.7 Histogram of observability analysis under changing direction
由表2 可知,当观测次数为1 时,无论是否改变星相机的光轴指向,可观测性矩阵都不是列满秩的,系统整体是不可观测的。当观测次数大于1 时,可观测性矩阵是列满秩的,且系统可观测度随着观测次数的增加而不断改善。此外,与固定光轴指向相比,改变光轴指向下的可观测度大约提升了两个数量级。
由图6 可知,在固定光轴指向的情况下,奇异值由高到低依次对应的是y轴位置误差、y轴速度误差、x轴位置误差、x轴速度误差、z轴位置误差、z轴速度误差,这是由于从固定光轴指向得到的测量信息无法对每个轴向的状态误差形成完备的几何约束,从而导致各轴向的可观测度相差较大。与图6 相比,在改变光轴指向的情况下,图7 中y轴和z轴的位置误差及速度误差对应的奇异值明显增大,说明通过改变光轴指向可以对各轴状态误差形成比较完备的几何约束,因此可观测度明显提升。
5.3 影响因素分析
载体位置、速度误差的估计偏差主要受到初始误差、空间目标位置精度、同一光轴指向下的观测次数、与空间目标计算角距的恒星数量等因素的影响,下面对各种影响因素通过仿真实验进行分析。
1)初始误差
由于角距测量提供了与载体位置直接相关的信息,位置的可观性较好,因此,位置误差的估计精度几乎不受初始位置误差的影响,而速度信息是通过位置的变化量间接提供的,因此,速度误差的估计精度并不受初始位置误差的影响。
由于角距测量无法提供直接与载体速度相关的信息,对速度的可观性弱,因此,初始速度误差对导航误差估计精度产生较大影响。图8 和图9 分别为不同初始速度误差下补偿前后的速度误差和位置误差的变化趋势。
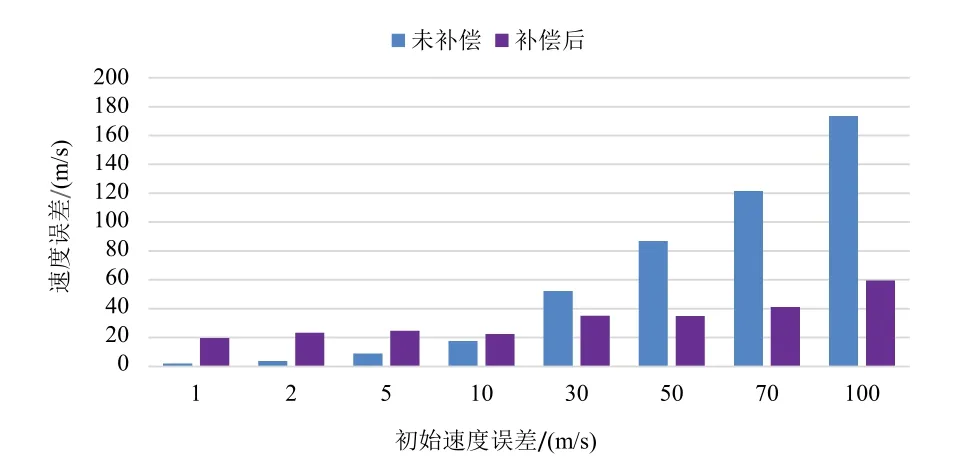
图8 不同初始速度误差下补偿前后的速度误差变化趋势Fig.8 Trend of velocity error before and after compensation under different initial velocity error
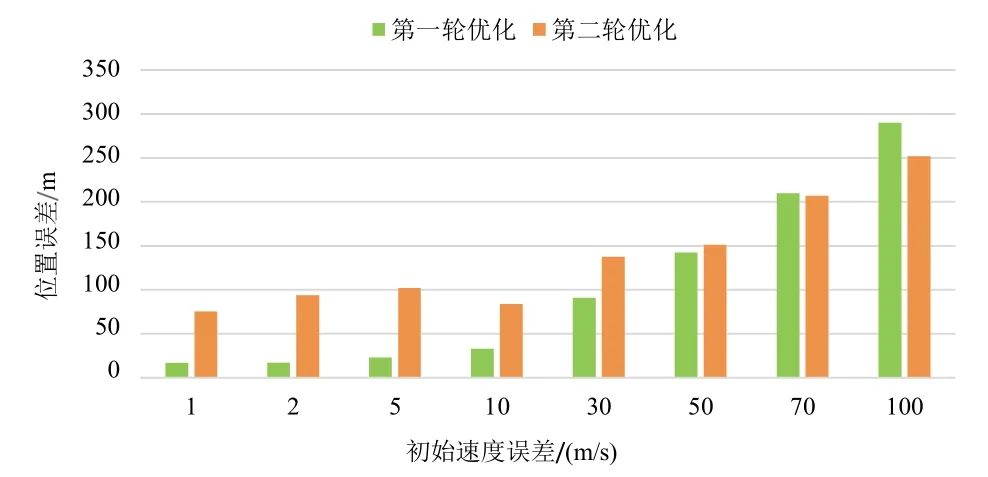
图9 不同初始速度误差下位置误差变化趋势Fig.9 Trend of position error under different initial velocity error
由图8 可知,随着初始速度误差逐渐增大,速度误差的补偿程度逐渐提高。当初始速度误差小于10 m/s 时,补偿后的速度误差甚至大于未补偿的速度误差,即速度误差无法被有效估计出来;当初始速度误差大于30 m/s 时,补偿后的速度误差明显小于未补偿的速度误差,尽管角距测量无法提供与载体速度相关的信息,但是从异步观测序列中可以得到载体位置的变化趋势,基于位置变化趋势间接反映的速度信息可以实现对速度误差的估计。随着初始速度误差的增大,在异步测量信息中位置误差的传播过程中,载体速度的变化趋势不再被噪声淹没,因此,速度误差的估计精度随着初始速度误差的增大而显著提高。
由图9 可知,当逐渐增大初始速度误差时,第二轮优化后位置误差的补偿程度逐渐提高。当初始速度误差小于50 m/s 时,第二轮优化后的位置误差大于第一轮优化后的位置误差;当初始速度误差大于70 m/s时,第二轮优化后的位置误差逐渐低于第一轮优化后的位置误差,且随着初始速度误差的增大,第二轮优化的位置误差下降程度更明显,这是由于当初始速度误差较大时,速度误差可以被有效估计,且随着速度误差估计精度的提高使第二轮优化时位置误差的估计精度也得到提升。
2)空间目标的位置精度
改变空间目标的位置精度,对应的速度误差和位置误差变化趋势分别如图10 和图11 所示。由图10可知,随着空间目标位置误差的增大,经过第二轮对位置误差和速度误差的联合迭代优化后,补偿后的速度误差逐渐增大,即速度的估计精度逐渐下降。由图11 可知,随着空间目标位置误差的增大,第二轮优化后的位置误差逐渐增大,甚至大于第一轮优化的位置误差,这是由于当空间目标位置误差大于50 m 时,速度误差的补偿程度低于40%,较低的速度估计精度使得第二轮优化后的位置估计精度降低。以上仿真结果表明,提高空间目标的位置精度能有效改善位置误差和速度误差的估计精度。
3)同一指向下的观测次数
改变同一指向下的观测次数,对应的速度误差和位置误差变化趋势分别如图12 和图13 所示。由图12和图13 可知,随着同一指向下观测次数的增加,迭代估计后的位置误差和速度误差均呈现下降的趋势。这是由于随着观测次数的增加,包含载体位置变化趋势的测量信息更加丰富,载体位置的变化趋势可以被有效地提取出来,提高了速度误差的估计精度,而速度误差估计精度的提升使得第二轮优化估计后的位置误差在第一轮优化的基础上进一步降低。
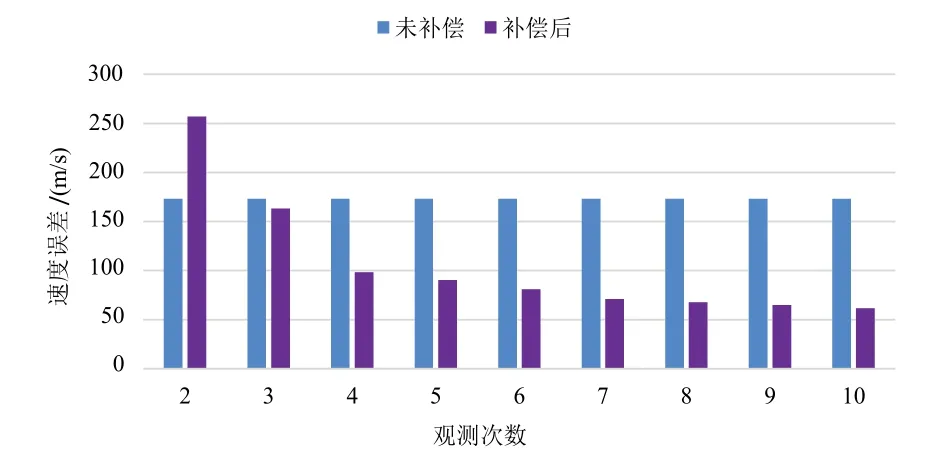
图12 改变同一指向下的观测次数时速度误差的变化趋势Fig.12 Trend of velocity error when changing the observation times under the same direction

图13 改变同一指向下的观测次数时位置误差的变化趋势Fig.13 Trend of position error when changing the observation times under the same direction
4)与空间目标计算角距的恒星数量
由于速度误差是通过提取异步观测序列中载体位置的变化趋势进行估计的,角距测量仅能提供与载体位置直接相关的信息而无法提供与载体速度相关的信息,因此,改变与目标计算角距的恒星数量对速度误差的估计精度影响并不明显。
理论上讲,与空间目标计算角距的恒星数量越多,测量信息越丰富,位置误差的估计精度越高,但由于受到星相机视场角的限制,即使可观的背景恒星数量较多,其与空间目标形成的角距仍然较小,对状态的几何约束程度并没有明显的提升。此时如果对所有可观恒星进行识别并计算与空间目标的角距,不仅需要消耗较长的处理时间,而且对位置误差估计精度的提升作用十分有限。不同恒星数量下位置误差的变化趋势如图14 所示。由图14 可知,当与空间目标计算角距的恒星数量小于3 时,两轮优化后的位置误差随恒星数量的增加呈现逐渐下降的趋势;当恒星数量大于3 时,随着恒星数量的增加,位置误差的下降趋势变得十分平缓,位置误差估计精度的提升程度很小。为减小计算代价,在星相机视野内与目标计算角距的恒星达到3 颗时即可保证一定的位置误差估计精度。

图14 不同恒星数下位置误差的变化趋势Fig.14 Trend of position error with different number of stars
5)星相机的轴扰动误差和安装误差
不同的星相机轴扰动误差所对应的位置误差和补偿后速度误差的变化趋势分别如图15 和图16 所示。在不同的星相机安装误差下,位置误差和速度误差变化趋势分别如图17 和图18 所示。
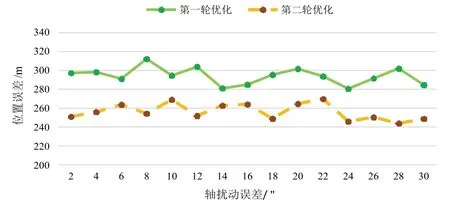
图15 不同轴扰动误差下的位置误差变化趋势Fig.15 Trend of position error under different axis disturbance error of the star camera

图16 不同轴扰动误差下的速度误差变化趋势Fig.16 Trend of velocity error under different axis disturbance error of the star camera

图17 不同安装误差下的位置误差变化趋势Fig.17 Trend of position error under different installation error of the star camera

图18 不同安装误差下的速度误差变化趋势Fig.18 Trend of velocity error under different installation error of the star camera
由图15~图18 可知,随着轴扰动误差和安装误差的增大,各阶段补偿后的位置误差和速度误差均在一定范围内波动,这是由于轴扰动误差对星光矢量和目标方向矢量的作用在基于两者计算角距时互相抵消,且角距测量的提取精度不受坐标转换的影响。
6 结论
对于测量信息有限的天文惯性组合导航系统,针对较大的初始状态误差影响状态估计精度甚至造成滤波发散的问题,设计了一种基于空间目标异步观测辅助的惯导误差快速确定方法,其特点在于:
1)在星相机视场角大小以及光轴转动角度受限的情况下,采用有限次数的异步观测不同空间目标方式,可以保证位置误差和速度误差的参数可估计性;
2)利用空间目标与可见恒星的角距测量来构建优化模型,可以避免轴扰动误差和安装误差对误差估计精度的影响;
3)在没有与速度直接相关的测量信息的情况下,利用载体位置误差与速度误差间的传播关系,通过构造优化模型,在初始速度误差较大的情况下,可以实现对速度误差的有效估计;
4)通过构建不同精度的优化模型,采用两轮迭代优化求解的方法,保证了惯导位置误差和速度误差估计的精度和收敛快速性。
