增强现实导航辅助CT 引导下穿刺犬肺结节模型
2024-02-16孙楠楠范小波谢政怡孙玉清杨晨晓徐春明张首誉马壮飞贾守强
周 涛,孙楠楠,范小波,王 秀,谢政怡,孙玉清,杨晨晓,徐春明,张首誉,马壮飞,张 敏,贾守强*
[1.济南市人民医院影像科,2.肾内科,山东 济南 271199;3.山东朗润医疗系统有限公司,山东 济南 251403;4.佳能医疗系统(中国)有限公司,北京 100016]
CT 对于肺结节的检出率较高[1-2],但仅凭影像学检查对部分肺结节不能完全确诊[3],需行影像学引导下穿刺及病理学检查获得诊断[4]。常规CT 引导下穿刺活检的阴性预测值相对较低,穿刺后可出现肺出血及气胸等并发症,且过程中多次CT 扫描还会带来高辐射剂量暴露[5-6]。利用增强现实(augmented reality,AR)技术能将三维CT 影像实时叠加到真实穿刺环境中,为精准定位肺结节提供了新的手段[7]。本研究通过动物实验观察AR 导航用于CT 引导下穿刺肺结节的价值。
1 材料与方法
1.1 实验动物 选取5 只成年健康犬(比特犬),雌雄不限,体质量5.75~10.43 kg、平均(7.75±1.31)kg。本研究获院医学伦理委员会批准(20220012)。
1.2 主要设备 LRWS X 射线计算机体层摄影机(湖南朗润智慧医疗科技有限公司),配备医学影像处理软件;R620-S1 移动式通用性动物麻醉机(深圳市瑞沃德生命科技有限公司);Minipalm 动物监护仪(湖南朗润智慧医疗科技有限公司);LonVision-a 经皮穿刺角度定位器(商品名幻视,湖南朗润智慧医疗科技有限公司),定位器包括显示平板组件、定位软件及附件,辅助线精度1.5°,入针点精确度2 mm,目标点精确度2 mm,辅助线刷新时间3 s。
1.3 建立模型 将实验犬麻醉,穿刺部位备皮,以左侧卧位保定于CT 检查床,行CT 平扫;于右侧肺各肺叶中各选择1 处放置靶环位置,测量穿刺深度及角度,由1 名具有5 年穿刺肺结节经验的主治医师于CT 引导下以18G 穿刺针将靶环(直径2 mm 显影环,湖南朗润智慧医疗科技有限公司)置入靶点,退出穿刺针后再行CT 扫描,以靶环放置成功为建模成功;之后常规饲养2 周。
1.4 穿刺肺结节 以同等概率随机将每只实验犬的4 个靶点分入A 组或B 组,使A、B 组各含10 个穿刺靶点。由具有5 年经验的主治医师甲或乙于AR 导航及CT 引导下穿刺A 组靶点,放置体表格栅后行CT 扫描,选择最优穿刺路径,定位目标穿刺点并以1 枚红色定位贴标记,以末端带有红色定位帽的穿刺针刺入皮下一定距离后,AR 导航系统自动识别穿刺针末端红色定位帽、计算穿刺针与靶点距离,并于床旁显示器上以辅助虚拟线模拟进针角度;操作者调整穿刺针角度使之与前者重合后进行穿刺,到位后行CT 扫描加以确认。具体操作流程见图1。于单纯CT 引导下穿刺B组靶点,贴体表格栅后行CT 扫描定位,确定穿刺路径后尝试性穿刺2 cm,期间通过多次CT 扫描修正穿刺路径直至到位。

图1 以AR 导航系统辅助CT 引导下穿刺犬肺结节过程 A.操作者对侧设备为AR 导航系统;B.穿刺针末端带有红色定位帽(箭),为AR 导航系统提供识别标识;C.显示器上部坐标轴中的绿色虚拟线模拟进针角度,应调整穿刺针与之重合;右下角实时显示穿刺针尖与目标点的距离
2 周后由医师甲或乙于AR 导航及CT 引导下穿刺B 组靶点、无AR 导航CT 引导下穿刺A 组靶点,操作同前。以AR 导航穿刺为AR 组,无AR 导航穿刺为常规组。记录2 组穿刺用时、CT 扫描次数、穿刺中调整进针路径次数及穿刺结束时三维重建所示针尖至病灶中心点的误差(图2)。
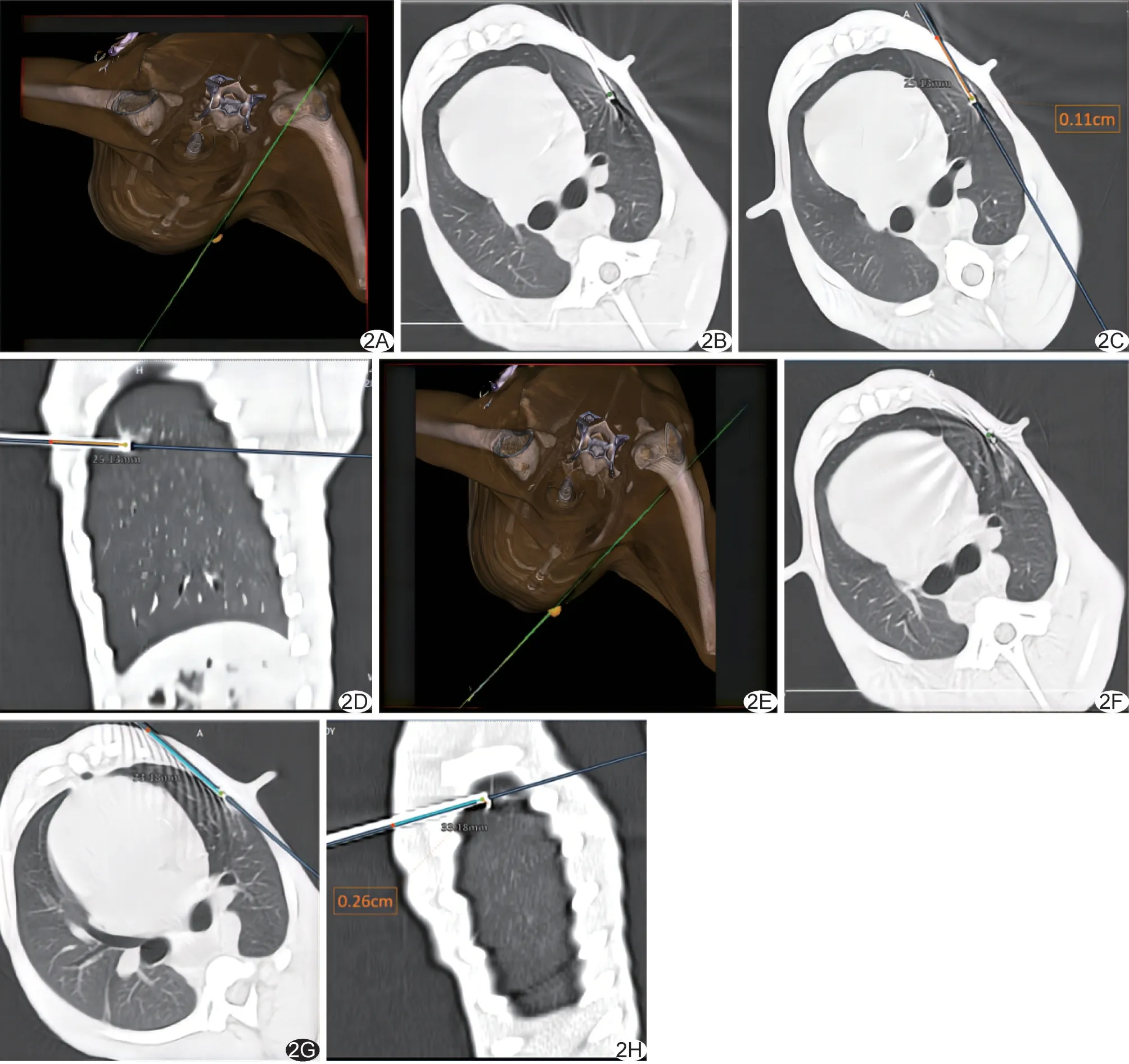
图2 穿刺犬肺结节模型过程CT 三维重建及平扫CT 图 A~D.AR 组,模拟3D 图像(A)、连续2 个穿刺层面轴位平扫CT 图(B、C)及矢状位平扫CT 图(D);E~H.常规组,模拟3D 图像(E)、连续2 个穿刺层面轴位平扫CT 图(F、G)及矢状位平扫CT 图(H)(绿色及蓝色线条示规划穿刺路径,可利用图像处理软件分别测量其进针深度及针尖到位误差值)
1.5 统计学分析 采用SPSS 21.0 统计分析软件。以-x±s 描述正态分布计量资料,组间行交叉设计资料方差分析。P<0.05 为差异有统计学意义。
2 结果
AR 组穿刺用时、CT 扫描次数、调针次数及误差距离结果分别为(13.62±5.11)min、(2.40±0.50)次、(2.75±0.44)次及(2.94±1.92)mm;常规组分别为(20.16±4.76)min、(3.10±0.64)次、(3.70±0.57)次及(4.90±3.38)mm。
交叉设计资料方差分析结果显示,利用AR 导航系统辅助CT 引导后,穿刺用时、扫描次数、调针次数及误差距离均低于常规CT 引导下穿刺(P均<0.05);各靶点穿刺顺序及不同实验犬只对穿刺用时、扫描次数、调针次数及误差均无影响(P均>0.05)。见表1。穿刺过程中均未见明显并发症;穿刺后实验犬状况均良好。

表1 穿刺2 组实验犬肺靶点方差分析表
3 讨论
CT 引导下穿刺活检是诊断肺结节的有效手段,但带来高辐射剂量暴露,且常规CT 引导下穿刺活检假阴性率相对较高;而肺结节位于肺动脉、肺静脉及支气管之间或距胸膜较近均增加穿刺后肺出血及气胸等风险。
在常规穿刺操作中引入导航系统可提高穿刺效率和准确性。吕银章等[8]以电磁导航系统辅助CT 引导下穿刺孤立性肺结节,平均操作时间短于常规CT 引导下穿刺。程载兴等[9]经系统评价和Meta 分析发现,相比传统CT 引导下定位,电磁导航辅助定位下穿刺肺结节并发症发生率更低。李宬润等[10]指出,引入全息多模态实时三维导航技术可迅速而准确地定位肺部微小结节。滕家俊等[11]认为经胸壁穿刺诊疗定位系统有助于安全、有效地穿刺活检肺结节。但上述导航系统均经济成本和学习成本较高、且部分系统无法实现实时显像,使其应用推广受限。
利用AR 技术可将三维CT 影像实时叠加于真实穿刺环境中,利用分析软件得到避开血管等重要解剖结构的最优穿刺路径并以辅助线展示,有利于提高穿刺效率、减少肺组织损伤及降低辐射剂量[7]。本研究发现,与常规CT 引导下穿刺相比,基于AR 导航系统CT 引导下穿刺实验犬肺结节的误差更小、穿刺用时更短且CT 扫描次数和调针次数均更少,提示该系统可提高CT 引导下穿刺活检肺结节的准确性及效率,并有助于降低穿刺并发症风险并减低辐射剂量。
本研究发现,以AR 导航辅助穿刺靠近膈肌及心脏等敏感位置的肺结节时,因其能生成精确的三维解剖图像,有助于充分掌握穿刺路径中的解剖结构及肺结节位置、大小和空间关系,并可在操作过程中提供实时反馈,有助于增加操作者信心。
综上所述,AR 导航系统用于辅助CT 引导下穿刺犬肺结节模型可提高穿刺准确性及穿刺效率。但本研究样本量小,有待进一步完善。
利益冲突:全体作者声明无利益冲突。
作者贡献:周涛研究设计和实施、撰写文章;孙楠楠、范小波、谢政怡和孙玉清研究实施;王秀和杨晨晓统计分析;徐春明和张首誉研究实施、修改文章;马壮飞和张敏统计分析、修改文章;贾守强研究设计、指导、经费支持。
