孤岛微电网基于分布式一致性算法的二次控制
2024-02-05肖蕙蕙熊文星李海啸吴泓林余建武魏书剑
肖蕙蕙,熊文星,李海啸,吴泓林,余建武,魏书剑
(重庆理工大学 电气与电子工程学院, 重庆 400054)
0 引言
面对日益严峻的能源问题,可再生能源的利用受到了越来越多的国内外学者关注。电网作为可再生能源的载体,面临着许多的挑战,如可再生能源的高渗透率、可再生能源和负荷的间歇性波动以及能源利用率较低等问题。为解决上述问题,国内外专家学者提出了微电网概念。由多个分布式电源(distributed generator,DG)、负载和控制器等构成的微电网系统能够协调各种分布式能源,其不仅能够实现分布式能源的发电、负荷的供电以及储能系统的储电等功能,还能进行系统的自我控制、保护和管理。微电网系统凭借其出色的稳定性与控制性,成为近年来国内外研究的重点[1-2]。
微电网可以在并网模式和孤岛模式下运行[3]。在并网模式下,一般由外部电网提供频率和电压,微电网调节功率以满足负荷需求;在孤岛模式下,没有外部电网提供频率和电压,由微电网自身提供频率和电压的支撑,通常采用下垂控制方法[4-6]来实现功率、电压、频率的控制。但受到拓扑结构、线路阻抗等因素的影响,下垂控制难以保证DG单元之间无功功率能够按容量进行分配[7]。
为了提高孤岛微电网的无功功率的分配精度,国内外学者提出了各种控制方法。文献[8]提出了一种基于小功率干扰信号来估计无功功率误差的增强型控制策略,该方法调节下垂特性不需要知道线路参数,且调节过程不需要通信通道,避免了通信延迟,但是信号处理过程复杂,在多个DG单元并联的微电网中难以实现。文献[9-11]提出了基于自调节下垂系数的改进下垂控制,用自身实际输出功率与期望功率的差额调节下垂特性实现无功功率的合理分配。虽然这些策略都考虑了由线路阻抗不匹配引起的无功功率分配问题,但都没有在控制环节中对线路阻抗进行补偿。
文献[12-13]中引入了虚拟阻抗的概念,虚拟阻抗能够补偿不匹配的线路阻抗,提高功率控制的精度和稳定性。但线路阻抗一般难以测量,使得虚拟阻抗值难以确定,过大的虚拟阻抗值会导致较严重的电网电压跌落,而过小又不能达到很好的补偿效果。对此,在文献[14]中提出了一种基于模糊控制的自适应虚拟阻抗控制策略,引入电压前馈环节和模糊控制算法以实现对虚拟阻抗的自适应调节。然而,在这些方法的实现过程中均需要通过中央控制器的集中式通信网络来调节虚拟阻抗值,这种过于依赖集中式通信网络的控制方式会极大程度地降低系统的稳定性和可靠性。
近年来,基于多智能体(multi-agent system,MAS)的分布式控制在微电网中得到了广泛的应用[15]。文献[16]提出了基于多智能体理论的微电网控制策略,该方法不再需要中央控制器进行信息交互,只需要邻近的DG单元进行通信。文献[17-18]中采用基于MAS的分布式控制实现了二次电压的恢复和负载负荷的重新分配。文献[19]提出了一种结合多智能体的一致性算法的分布式协调控制策略,实现了精确的功率分配和较好的环流抑制效果。以上方法虽然考虑了基于一致性算法的下垂控制,但鲜有人将其利用至虚拟阻抗的自适应调节中。
鉴于以上问题,在孤岛模式下的传统微电网控制结构中,针对线路阻抗不匹配引起的功率不合理问题,分析了输出功率与线路阻抗的关系,构建了分布式控制通信结构与虚拟阻抗的模型。提出一种基于自适应虚拟阻抗和一致性算法的孤岛微电网分布式二次控制策略,利用一致性算法来自适应调节虚拟阻抗值,从而补偿不匹配的线路阻抗,实现无功功率按容量的合理分配。针对负载变化和引入虚拟阻抗导致的电网电压跌落问题,采用基于动态一致性算法的平均电压恢复方法,调节各DG输出电压,稳定微电网平均电压水平在额定电压的可接受范围内。
1 一次控制——下垂控制
1.1 下垂控制基础模型
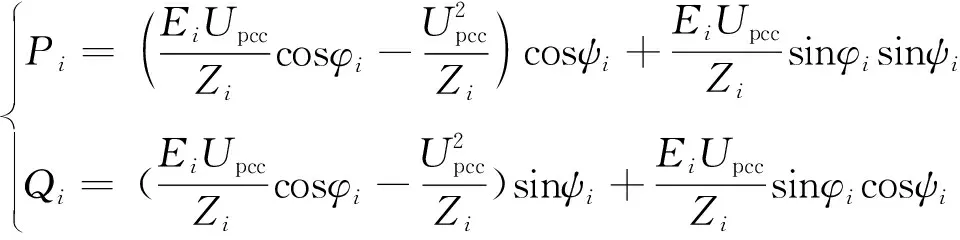
图1是在孤岛模式下多台DG单元并联运行简化后的等效结构图。其中,各DG单元输出的有功功率Pi和无功功率Qi分别为:
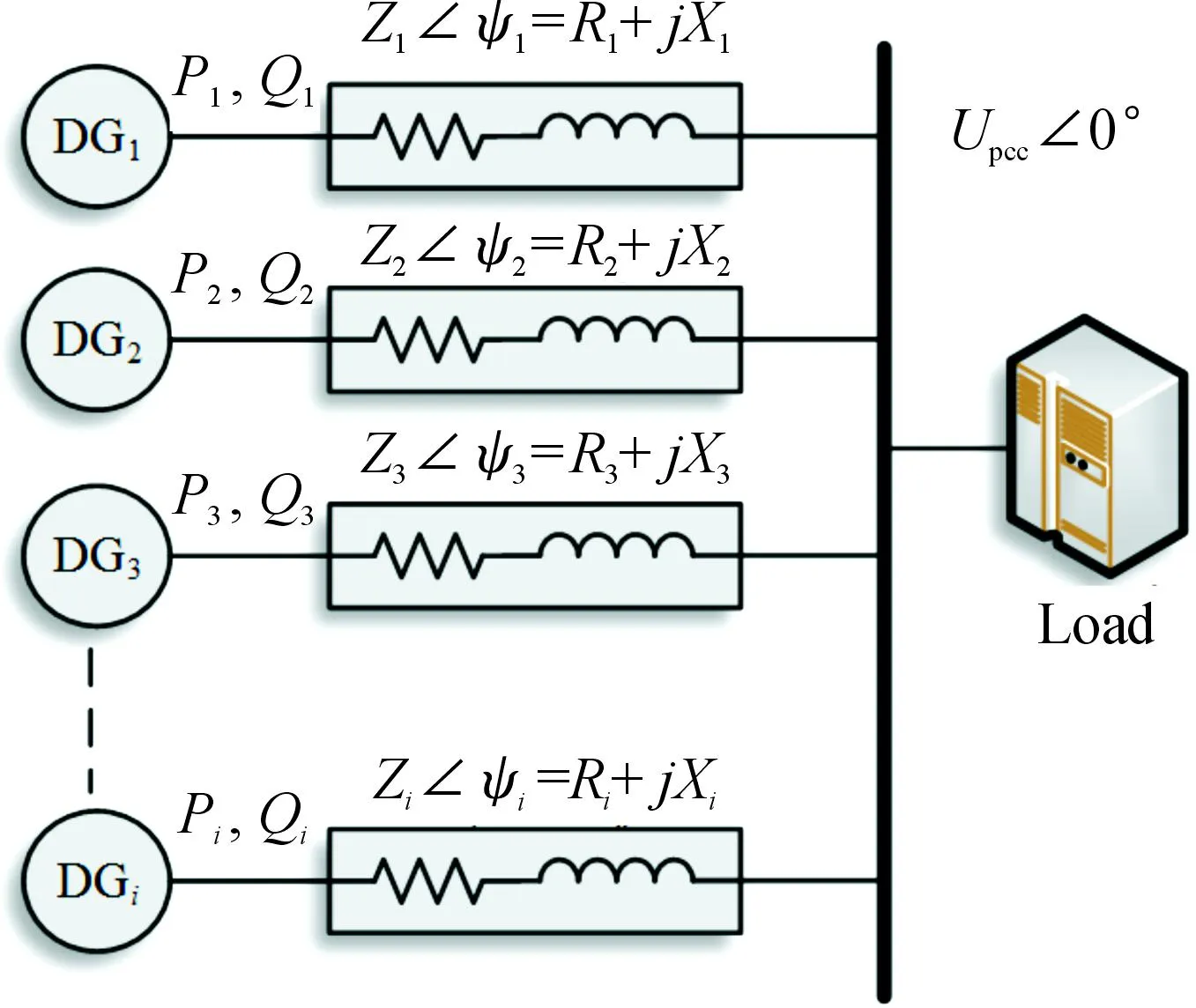
图1 多台并联DG单元等效结构图
(1)
式中:Ei为DGi的输出电压幅值;Upcc为公共耦合点的母线电压;φi为DGi与母线电压之间的功率角;Zi和ψi分别为等效线路阻抗的幅值及阻抗角。
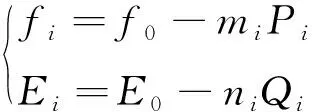
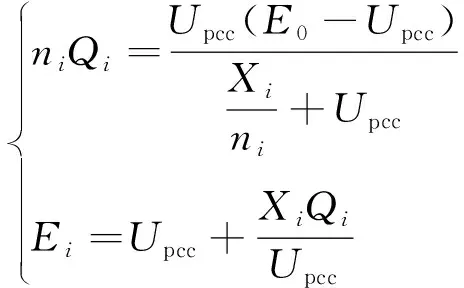
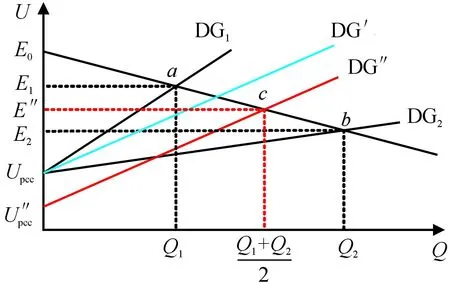
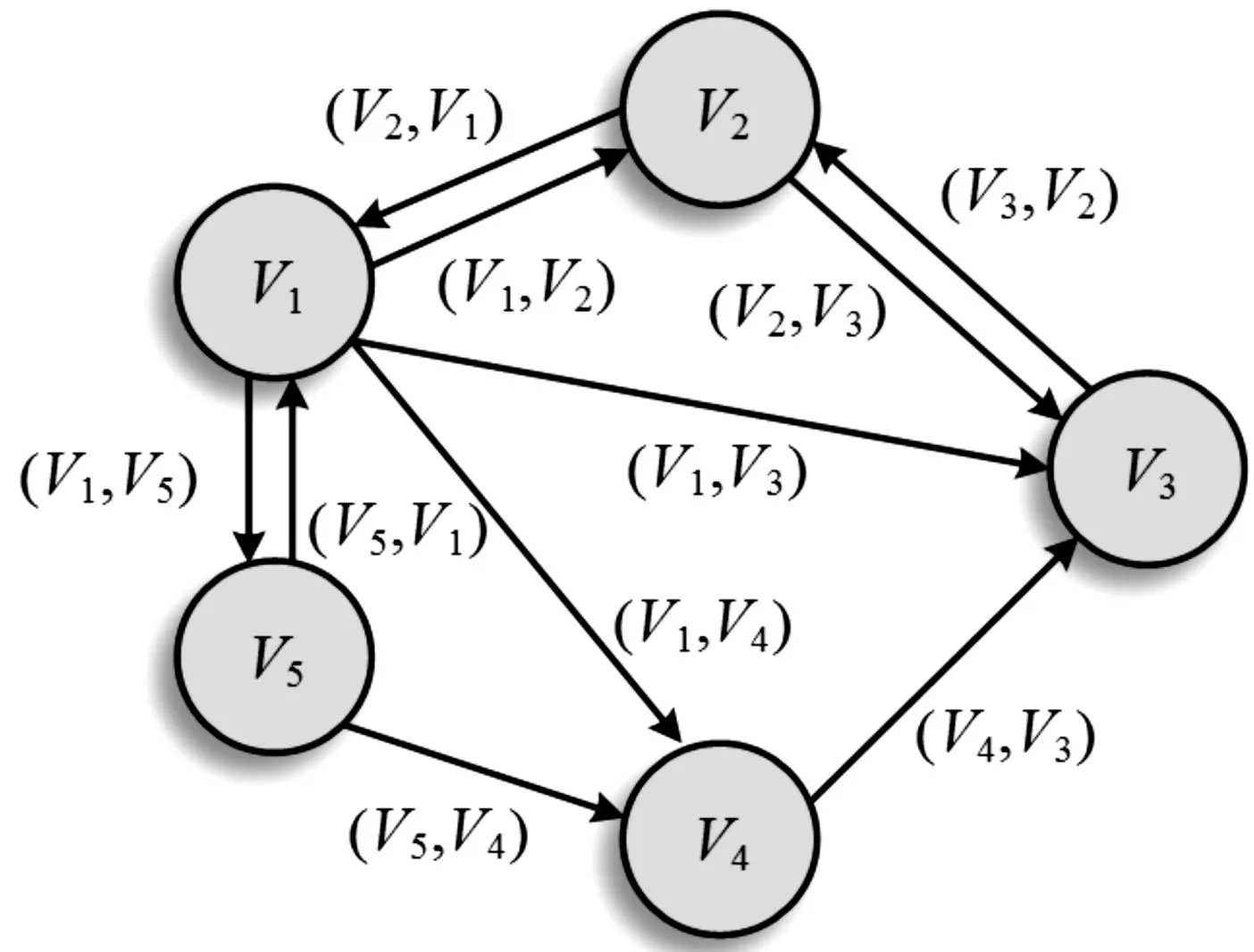
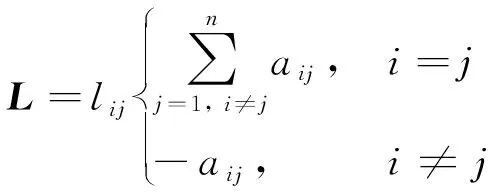
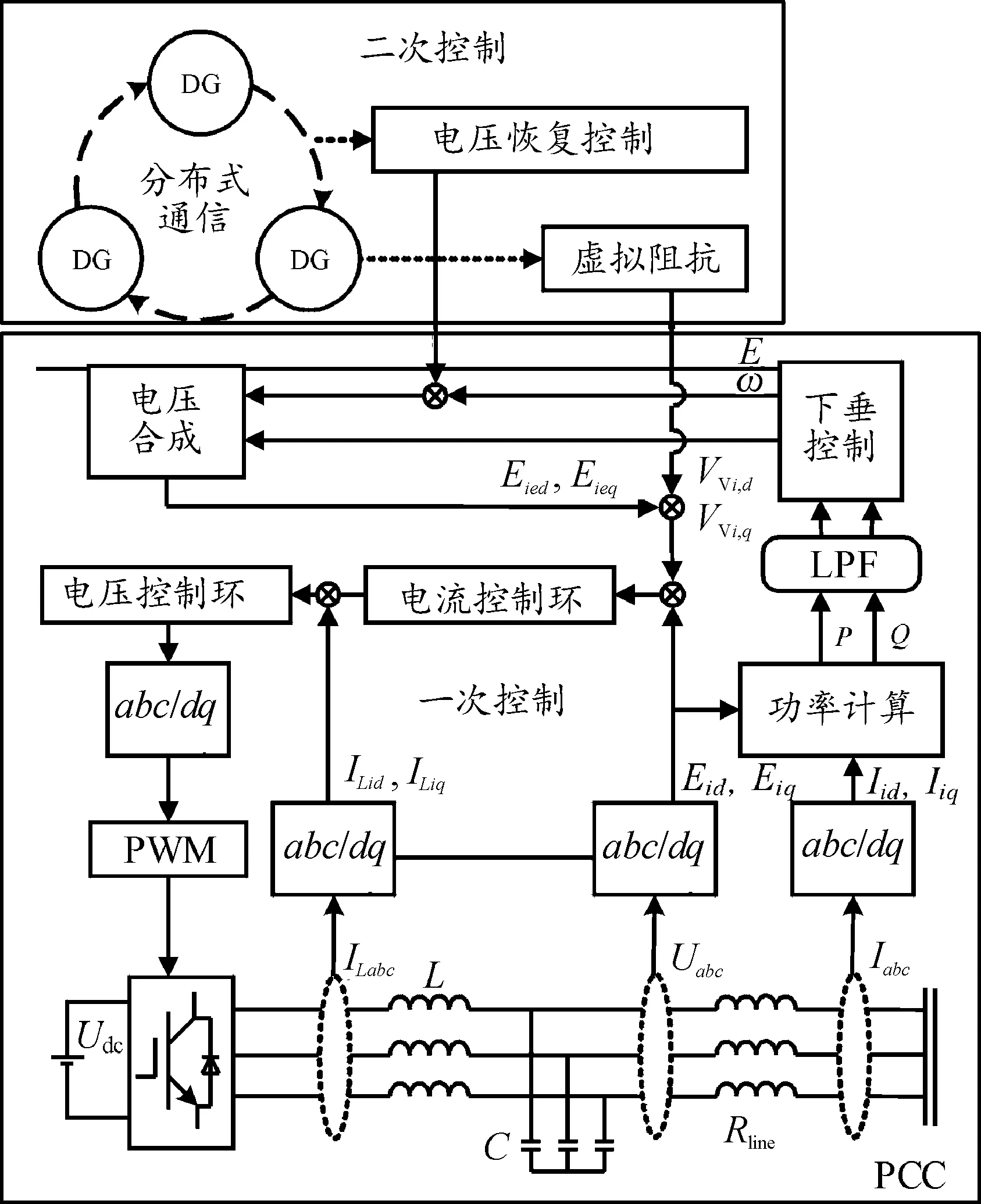
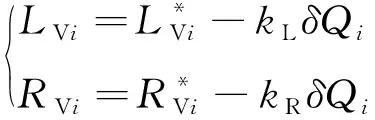
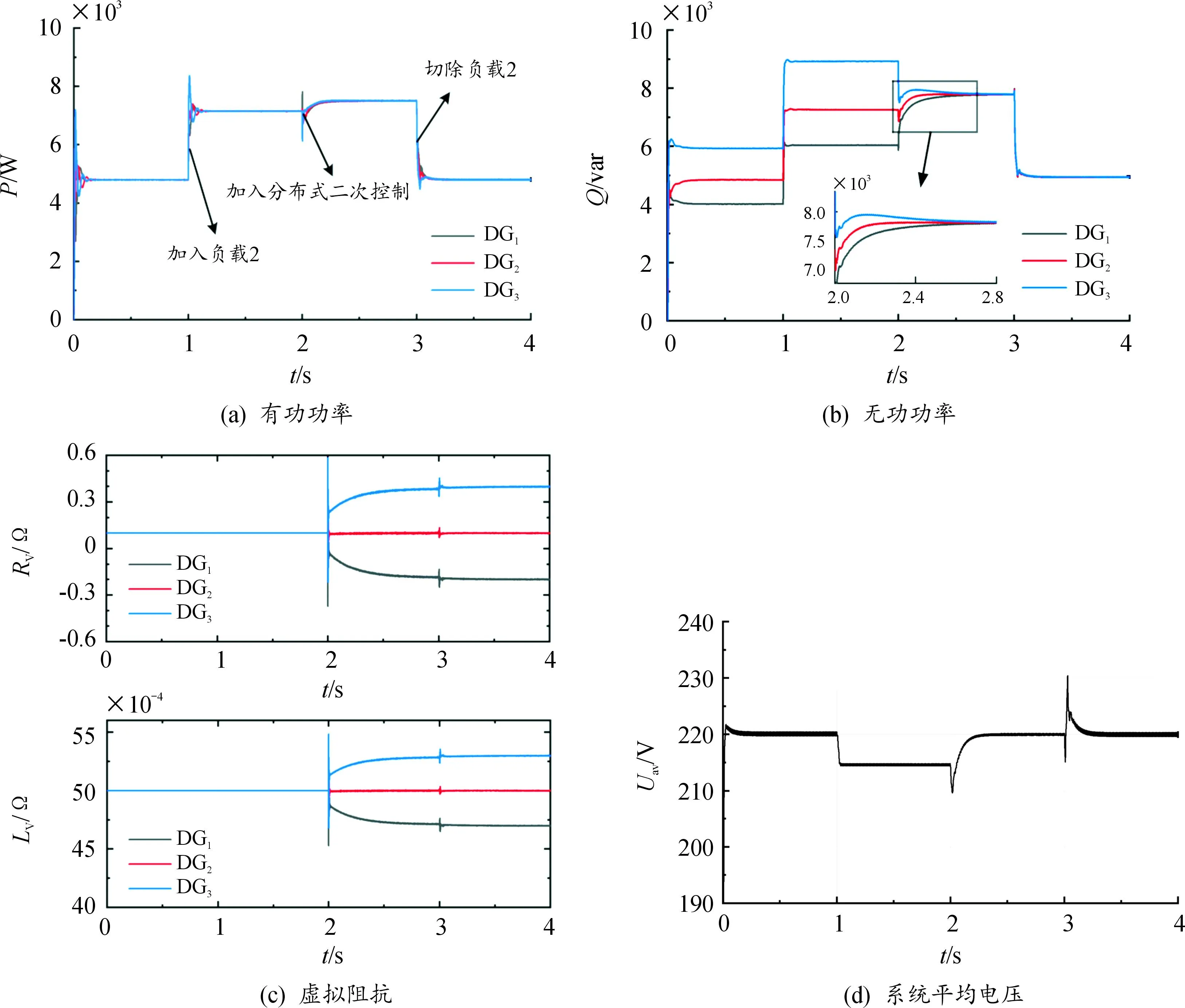
考虑到一般微电网中线路阻抗主要呈感性,其阻性部分远远小于感性部分[1],即Ri< (2) 根据式(2)可知DG的输出有功功率主要受到功率角φi的影响,而输出无功功率则主要取决于DG输出电压幅值的大小。根据频率与功角φi的关系,可以得到传统下垂控制的基本公式: (3) 式中:f0和E0分别为空载时DG输出的频率和电压幅值;mi和ni分别为频率下垂系数和电压下垂系数。 由于微电网在孤岛模式下的频率是一个全局变量,各DG单元输出的有功功率能够按下垂系数实现合理分配。而输出电压作为局部变量,受到无功下垂系数、线路阻抗、负载功率等因素的影响,所以各DG单元之间很难按容量合理分配。为了使DG单元之间按额定功率的比例分配负载的无功功率,下垂系数应与其额定功率成反比,满足: n1Q1=n2Q2=…=niQi (4) 考虑到系统纯感性线路下的功率角φi通常很小(cosφi≈1),将式(3)和式(4)代入式(2)可以得到DGi实际输出的无功功率和电压为: (5) 为了满足式(4)中无功功率与额定容量成反比的条件,将式(5)代入式(4)中得到: (6) 从式(6)中可以看出,要实现DG单元之间精确的无功功率合理分配,必须要使下垂系数ni与线路阻抗Xi成正比关系。考虑到式(4)中的关系,则线路阻抗应与无功功率成反比,即满足: X1Q1=X2Q2=…=XiQi (7) 然而在孤岛微电网中各DG单元的线路阻抗很难满足式(7),采用传统的下垂控制将会导致负荷的无功功率分配误差一直存在,这就是下垂控制无功功率分配的局限性。 为了解决上述下垂控制存在的功率分配局限性,提出基于自适应虚拟阻抗的二次控制[20],即用虚拟阻抗补偿不匹配的线路阻抗,提高功率分配精度,并采用二次电压恢复来减小电压的偏差。 在孤岛微电网中,若线路阻抗呈阻感性,则有功功率和无功功率之间存在的耦合问题会导致下垂控制存在误差,在下垂控制中加入虚拟阻抗能够使得线路等效阻抗呈纯感性,有效实现有功功率和无功功率的解耦,而加入动态虚拟阻抗值环节可以解决线路阻抗不匹配导致的DG无功功率分配不均的问题。 在添加虚拟阻抗后,DG单元的等效线路阻抗值将发生改变,式(7)可改写为: (8) 将式(8)代入式(7)可以得到: (9) 由此可知,如果能够调节自适应虚拟电抗ΔXVi满足式(9),那么DG单元之间就能够实现按容量配比的无功功率合理分配。 以2台同容量的DG单元并联运行为例[21],其功率分配关系如图2所示。在下垂控制中,2台DG单元无功功率输出分别稳定在a、b点,由于DG1的线路阻抗大于DG2,导致电压E1大于E2,输出无功功率Q1低于Q2。加入虚拟阻抗补偿不匹配的线路阻抗后,2台DG单元的等效线路阻抗相等,即X1=X2,由式(5)可知它们的下垂特性曲线的斜率相等,特性曲线均变为DG′。但由于加入虚拟阻抗会导致电压跌落,特性曲线向下移动至DG″,此时2台DG均稳定工作在c点,共同承担Q1+Q2的无功功率,各自输出总无功功率负荷的一半,从而实现了无功功率的合理分配。 图2 2台DG单元无功分配图 传统的二次控制多采用分散式和集中式的控制方式。分散式控制的特点在于各个单元之间没有通信,各DG通过对自己本身的信息处理来达到控制目的。作为无通信控制方式,其缺点也很明显,DG单元之间难以协调,系统可靠性差。集中式控制的特点在于具有一个协调整体的中央控制器,各DG单元的信息传给中央控制器后,经过其处理后再传回各DG单元。然而该控制方式在面对大量的DG单元或结构复杂的系统时,计算量过大会影响系统的稳定性,且中央控制器一旦故障,整个系统就将面临崩溃的局面。 为避免分散式和集中式控制带来各种问题,采用基于MAS的分布式控制方式。该控制方式仅仅需要自身和邻近智能体的信息,无需所有智能体的信息,且不再需要中央控制器,在面对DG单元故障和通信线路故障时仍能够实现较好的控制效果,具有较高的可靠性。 图3 分布式控制的拓扑图 (10) 基于MAS的一致性算法一般指智能体通过算法控制与邻近智能体进行信息交互,最终使得系统中各智能体的状态量趋于一致的控制算法[22]。基本的一致性算法的公式如下: (11) 所提控制策略旨在调节系统无功功率和电压,因此将DG单元的无功功率和电压作为状态量,构建一个稀疏矩阵通信网络拓扑结构,将DG单元的本地状态量和邻近DG单元的状态量送入控制器,通过一致性算法实现对虚拟阻抗和电压的调节,最终实现整体电网的协调控制,其控制框图如图4所示。 图4 分布式二次控制策略框图 为自适应调节动态虚拟阻抗值实现无功功率合理分配,取DG单元的无功功率Qi为智能体节点的状态量,将每个DG的无功功率与邻近DG的无功功率通过一致性算法加权比较,得到无功功率偏差值为: (12) 式中:Cn为耦合增益系数;aij反映整个邻近矩阵中所有节点通信的变化。 将式(12)改写为整体系统的矩阵模型: eniQi=CnLH (13) 式中:全局的无功偏差值eniQi=[en1Q1,en2Q2,…,en3Q3]T;局部的实际功率信息H=[n1Q1,n2Q2,…,niQi]T。 将无功功率偏差值送入一个PI控制器中,从而产生虚拟阻抗的校正项δQi: (14) 再将矫正项代入虚拟阻抗环中,得到自适应的虚拟阻抗的控制函数: (15) 调节完成的虚拟阻抗通过解耦计算[23]获得在dq坐标系下中的电磁方程: (16) 式中:VVi,d和VVi,q分别为DG单元的外环电压参考值;Iid和Iiq分别为输出电流d、q轴分量。 为了解决由下垂控制和虚拟阻抗引起的孤岛微电网电压跌落问题,提出一种基于一致性算法的动态电压恢复二次控制策略,将各DG单元输出的电压的平均值恢复到电网的额定电压等级,从而使得电网的电压恢复到可接受范围内。 由于在同容量的DG单元采用自适应虚拟阻抗控制能够使得无功功率的输出完全相同,理论上每个DG单元的下垂控制输出的电压也应完全相同,然而DG单元间线路阻抗上的实际压降并不相等,DG单元输出的实际电压不能调节为相同的值,因此只能将微电网中所有DG单元输出电压的平均值调节至电网电压的额定电压值。 取DG单元的输出电压Ei为智能体的状态量,将自身电压和邻近DG单元的电压送入分布式控制器中,通过一致性算法的计算得到一个局部平均电压: (17) 式中:CE为电压耦合增益。 将其改写为系统全局电压的矩阵模型: (18) 将获得的全局平均电压参考值与电网额定电压Eref的差额送入PI控制器中产生电压校正项: (19) 利用获得的电压校正值更新DG单元的电压输出参考值Eei,使得电网的平均电压恢复到额定电压: Eei=Eref+δEi (20) 通过dq变换,将动态电压恢复控制产生的电压补偿量Eei变为Eeid和Eeiq,将其与虚拟阻抗环的电压分量和DG单元输出电压分量的差值送入电压电流双闭环,得到电压外环的参考量,如图5所示。 图5 分布式二次控制电压外环结构 为验证所提控制策略的有效性,基于Matlab/Simulink软件平台搭建孤岛微电网仿真模型,采用3台相同容量的DG单元并联运行。单台DG的最大有功功率和无功功率容量分别为20 kW和10 kvar,负载1的有功功率和无功功率分别设置为15 kW和15 kvar,负载2的有功功率和无功功率分别设置为9 kW和9 kvar。系统初始带负载1运行,负载2离线。各DG单元通过开关连接至母线(PCC),且各DG的线路阻抗不相等。系统仿真参数如表1所示。 为验证自适应虚拟阻抗在线路阻抗不匹配的情况下具有更好的无功功率分配效果,将其与传统的下垂控制和静态虚拟阻抗控制方法作比较,仿真结果图6所示。 图6 下垂控制、静态虚拟阻抗控制与所提二次控制对比 0~1 s内采用传统下垂控制,系统平均电压稳定到220 V,3台DG单元输出功率呈现较大的差额。1~2 s内加入静态虚拟阻抗控制后,虽然各DG单元输出功率差额减少,但没有完全消除,且系统的平均电压产生较大跌落,影响了系统的稳定运行。2~3 s切换为所提分布式二次控制方法,系统平均电压再次恢复到额定值,各DG单元输出无功功率逐渐趋于一致,实现了同容量DG单元无功功率的完全均分。 为验证自适应虚拟阻抗在负载变化情况下各DG单元按容量分配无功功率的性能,在负载变化的情况下,将其与传统的下垂控制方法作比较,仿真结果如图7所示。 图7 变负载下的传统下垂控制与分布式二次控制对比 0~2 s内采用传统的下垂控制,各DG单元输出的无功功率不能实现合理的分配,尤其在1 s时,微电网切入负载2后,DG单元间由于负载电流增大导致无功功率差额增加,且由下垂特性造成各DG单元承担的无功功率增加,导致系统平均电压大幅下降。 2~4 s内系统加入所提分布式二次控制方法,通过根据邻近信息调节虚拟阻抗值并恢复系统的平均电压,各DG单元输出的无功功率趋于一致;在3 s时,微电网切除负载2,此时各DG单元仍能共同承担系统的总负荷,实现较好的无功功率分配,且系统平均电压稳定为额定电压值。 此外,根据图7(c)可知由于线路阻抗值Zline1 为验证所提控制策略在DG单元故障时的无功功率分配能力和电压恢复性能,图8为所提策略在单台DG单元故障时的仿真结果。 图8 单机故障下的仿真结果 0~1 s内采用所提控制方法,系统稳定运行,功率按容量合理分配。1 s时,DG3发生故障并从电网断开,此时系统中剩余的DG1和DG2立即响应功率变化,共同承担系统的15 kvar负荷,即2台DG分别输出7.5 kvar的无功功率,且系统的平均电压也能收敛到额定电压。 2 s时,系统再次切入5 kvar的无功负载,此时DG1和DG2不受故障DG3单元的影响,仍能通过邻近信息交流实现合理的分配,并保持系统平均电压在额定值。 研究了微电网在孤岛模式下并联DG单元之间线路阻抗不匹配引起的无功功率分配不合理问题,提出了一种基于一致性算法的分布式二次控制策略,采用邻近DG单元信息自适应调节各DG无功与电压输出,消除了无功差额,并恢复电网平均电压水平,通过Matlab/Simulink仿真验证了所提策略的有效性。仿真结论概括为以下3点: 1) 所提策略相比传统下垂控制和静态虚拟阻抗控制,能够很好地补偿线路阻抗,实现无功功率分配的无差调节; 2) 所提策略在负载变化时能够自适应调节虚拟阻抗值,实现DG单元无功功率按容量合理分配的同时恢复电网跌落电压,具有较好的系统稳定性; 3) 所提策略采用分布式控制,相比传统集中式控制,在系统DG故障时,仍能通过邻近DG单元信息实现剩余DG无功功率合理分配和系统平均电压的恢复,具有较高的系统可靠性。
1.2 下垂控制无功功率分配的局限性
1.3 采用虚拟阻抗的补偿方法



2 二次控制——分布式一致性控制
2.1 多智能体一致性算法原理



2.2 基于分布式一致性算法的无功功率控制


2.3 基于一致性算法的动态电压恢复控制




3 仿真分析
3.1 算例1:多种无功控制控制方法对比
3.2 算例2:变负载情况下的无功分配性能分析
3.3 算例3:电网故障下的无功功率分配和电压恢复性能分析

4 结论
