基于激光跟踪测量的数字化仿真方法研究
2024-02-03杨春光裴雨霞孙茗妍
高 瑞, 马 宁, 杨春光, 边 东, 裴雨霞, 孙茗妍
(1.特种车辆设计制造集成技术全国重点实验室, 内蒙古包头014030; 2.内蒙古第一机械集团有限公司, 内蒙古包头014030)
0 引言
实测数据是虚拟装配的基础。 三维激光跟踪扫描技术能快速得到目标量、高精度的三维点云数据,是获取装配仿真之前的较优选择。近年来,国外已有学者将测量技术应用于装配式结构件的三维尺寸校核中。 Bosche 等[1]人使用三维激光扫描仪对水泥混凝土墙面的平整度进行了评价, 并在此基础上提取了圆柱体混凝土构件的几何尺寸。Kim 等[2]利用点云数据的边缘检测与角点提取算法得到了装配式桥面板的几何尺寸, 并进一步获取了装配式桥面板的空间位置,精度可达2mm。Yoon 等[3]通过三维激光扫描仪, 识别了装配式桥面板及水泥混凝土梁间连接件的几何尺寸与位置, 并分析了装配过程中的尺寸不匹配情况。 上述研究结果证明了三维激光扫描技术在结构件三维尺寸检测中的可行性和有效性, 但其试验结果多基于室内试验,未使用工程现场的实测点云数据,且并未进一步考虑预制构件的虚拟装配过程。 数字化测量、虚拟装配仿真、 公差分析等为代表的数字化手段是当前制造业的热点[4-5]。
本文使用三维激光扫描仪获取了结构件零部件装配样件的实测点云[6-7],通过采样、去噪、数据处理等预处理技术与特征提取算法,然后提出了虚拟装配仿真方法,并通过装配仿真报告给出了装配时的公差优化方案,对干涉的零件进行提示,提前进行处理或更换,进而保证一次装配成功率,为保证产品装配质量和提高装配效率提供支撑。
Metra SCAN 可实现计量级测量和检测, 可对尺寸在0.2~10m 之间的零部件进行几何尺寸和任意形状表面检测,不受零部件材料类型、颜色和反射属性的局限,可与支持动态参考、 自动对齐和持续参数监测的C-Track 光学跟踪器配合使用, 可在实验室和车间环境中实现最为精确的测量。 也可与Handy PROBE 配合使用, 借助3D扫描和便携式光学CMM 的双重优势简化检测过程。
HandyPROBE 是便携式手持激光扫描仪,具有最高的测量速率和精度,适用于0.1~4m 的较小零部件,不受复杂程度、材质或颜色的影响。 在所有工作条件或环境下,均可提供一致且可重复的结果,精度可达到计量级测量。
1 结构件三维数据获取
本系统方案采用光学CMM 测量技术来实现结构件的三维数据,包括机器人系统和CMM 扫描测量系统。 其中CMM 扫描系统与机器人第六轴手臂连接固定,通过机器人位置和姿态地调整来实现对于结构件的各个位置进行整体扫描,得到装配体的实际数模。
系统根据扫描所获得的三维模型与理论模型进行对比,从而判断部件是否合格。 测量系统架构图如图1 所示。

图1 测量系统架构图
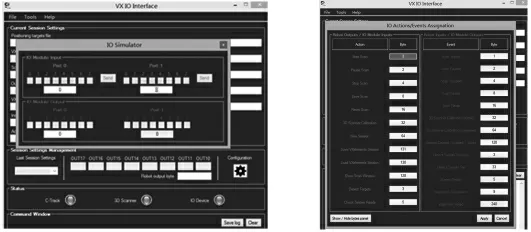
图2 机器人扫面设置界面
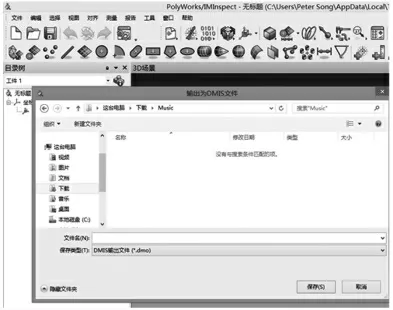
图3 输出数据界面图

图4 计算调整量流程图
机器人触发扫描IO 接口通过机器人触发开始三维扫描或者停止三维扫描,同时输出符合条件的DMO 数据格式自动执行并快速导出。
2 仿真方法研究
虚拟装配系统能够接收来自测量系统中板件数据,并且对板件进行有效编号管理, 按照设定测量顺序自动将数据记录到系统中,同时与板件正确关联,另外系统能够对同种零件多批次测量设定规则。
获得数据之后, 首先将实测点自动匹配到最合适的地方,匹配规则为将设计点和实测点尽可能相互对应,距离最短,方法如下:
2.1 将实测模型进行绕轴旋转
基础方法——基准面重合:
分三步进行计算,分别为基准点、基准线和基准面:
将目标点定义为A0(x01,y01,z01),B0(x02,y02,z02),C0(x03,y03,z03),将移动点定义为A1(x11,y11,z11),B1(x11,y11,z11),C1(x11,y11,z11)。 其中A0为基准点,A0A1为基准线
(1)将两个基准点重合,计算得到平移矩阵
将A0移动到坐标原点
根据余弦定理,计算出旋转角β:
其中a=B0B1,b=A0B1,c=A1B0;
将旋转轴和旋转角带入公式(1)计算出矩阵M3。
(3)将基准点移动回原来的位置,计算矩阵M5。
(4)最终的变换矩阵M6=M5×M4×M3×M2×M1。
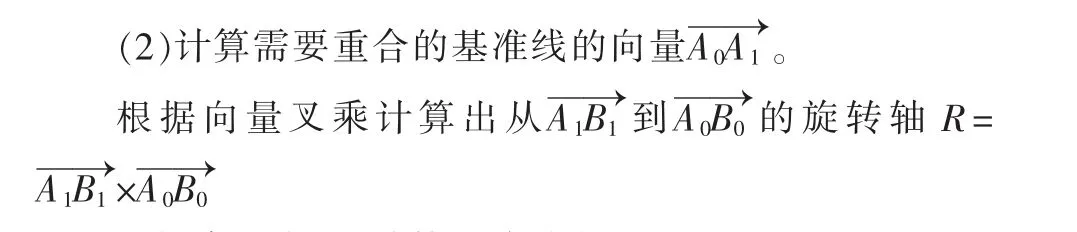
(5)计算需要重合的面的法向量。
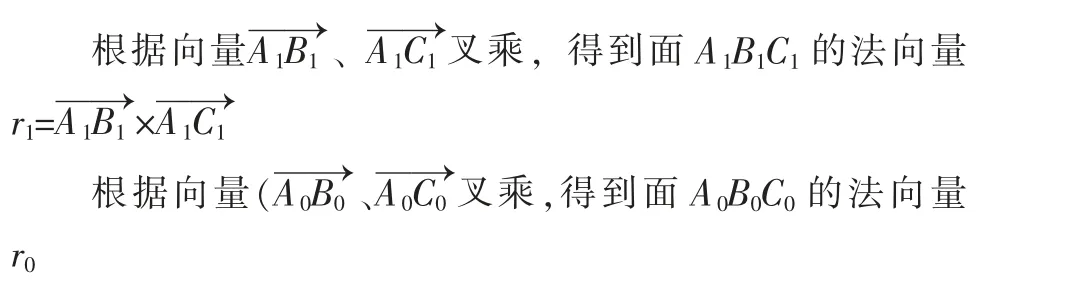
向量r1、r0重合参考【步骤2】
向量a=(x1,y1,z1),b=(x2,y2,z2)
a×b=(y1z2-y2z1,z1x2-z2x1,x1y2-x2y1)
(6) 得到面重合的最终变换矩阵。
计算调整量部分的流程步骤:
步骤一:获得所有搭载快,设计点、实测点以及相应公差数据规格等。
步骤二:计算调整量范围,每个搭载块计算和前一个搭载快对应公差两个点之间的向量v (指向前一个搭载快),用实际距离减去公差范围的平均值,得到对于该一组公差,应当移动的距离,用向量q 表示。
步骤三:对每一组公差,都求得一份应当移动的合适距离q。 图中v/|v|表示单位化的向量。
步骤四: 再将所有计算得到的向量q 加和平均得到一个平均化的向量。 该向量同时表示需要位移的方向和距离。
步骤五:输出该向量代表的矩阵,结束。
2.2 根据公差得到实际位移的方向和距离:
(1) 获得与公差的相对应的两个点D1j,D2j,(j=1,2,3…,n)。 D1表示已装好的,D2表示当前正要装的。
(2)为每一组对应公差计算其需移动方向和距离,用dj向量表示。 有
dj=OD1j-OD2j
(3)其中,实际移动的距离应该为:
(4)则每一组公差对应的dj实为:
(5)最后将各个dj实合并得到最终需要位移的方向和距离d:

在虚拟环境下输出符合公差要求的仿真报告(见图5),确保装配的零件的间隙的最优化。 可以在虚拟环境下根据工艺要求进行调整与更换零部件,同时进行统计分析。

图5 虚拟装配仿真报告
3 结束语
采用基于跟踪仪的三维激光自动扫描对待装零件进行位姿跟踪扫描,通过获取测量数据,并在虚拟环境下基于测量数据进行实际装配之前模拟装配,通过计算相关参数来评价装配之后能否达到设计要求,在实际装配之前完成公差分析与优化, 保证结构件实际装配能够顺利进行,能够提前感知现场装配过程中可能存在的装配干涉问题,一定程度上提高了装配效率,降低零部件返修率。
