基于航迹概率假设密度的多传感器多目标跟踪
2024-01-30王志伟刘永祥卢哲俊
王志伟, 刘永祥, 杨 威, 卢哲俊
(国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
分布式多传感器多目标跟踪(distributed multi-sensor multi-target tracking, DMMT)由于其可扩展性、对单点故障免疫的优势在诸多领域[1-3]受到了广泛关注。然而,DMMT存在双重挑战:多目标跟踪和分布式信息融合。
多目标跟踪是指基于有噪声的传感器量测估计一组代表了目标状态随时间演化的航迹。 典型的多目标跟踪(multi-target tracking, MTT)方法包括多假设跟踪[4](multi hypothesis tracking, MHT)、联合概率数据关联[5](joint probabilistic data association, JPDA)以及随机有限集[6-9](random finite set, RFS)框架。从贝叶斯的角度,解决MTT问题的一种严谨的方法是Mahler提出的RFS框架和有限集统计学[6](finite set statistics, FISST)。最熟知的RFS滤波器是概率假设密度(probability hypothesis density, PHD)[10]、势概率假设密度(cardinality PHD, CPHD)[6]、多目标多伯努利(multi-target multi-Bernoulli, MeMBer)[11]和广义标签多伯努利[12](generalized labeled multi-Bernoulli, GLMB)滤波器。由于GLMB滤波器涉及大量多目标指数和的预测与更新,其计算复杂度较高[13]。相比GLMB滤波器,PHD滤波器最显著的优势是其计算复杂度小,缺点是不能形成航迹[14]以及“远距幽灵作用”[6]。近年来,García-Fernández[15]等人提出了航迹PHD(trajectory PHD, TPHD)滤波器,其在估计精度和计算复杂度方面都表现良好,基于航迹RFS建模的滤波器不仅提供了精确的航迹表示[16],而且也能够提高航迹过去时刻状态的估计精度。
分布式信息融合涉及将多传感器信息以一种鲁棒、实时和分布的方式融合,以弥补单节点感知能力受限的缺点[17]。由于传感器间的公共信息(公共的过程噪声和先验信息)普遍存在且难以计算[18],使得基于贝叶斯最优的融合方法难以实现且鲁棒性差。为此学者们设计了基于密度融合[18]的分布式信息融合方法,典型的密度融合方法包括广义协方差逆[19](generalized covariance intersection, GCI)和加权算术平均[20](weighted arithmetic average, WAA)。GCI和WAA都遵循最小信息差异准则(principle minimum discrimination of information, PMDI),且对公共信息计算免疫[21]。一般情况下,GCI准则融合精度较高,但容易出现漏检[22]且计算量大。相比之下,WAA在势估计方面具有较好的性能,但其融合结果的虚警率较高[23]。
近年来,GCI融合准则已成功应用于各种RFS滤波后验密度融合[21],比如PHD[24],MeMBer[25-26]滤波器。尽管理论严谨,但上述融合算法也存在无法形成航迹、新目标检测延迟、漏检和计算复杂度高的问题。针对高杂波密度场景下,传统多传感器多目标多伯努利(multi-sensor MeMBer, MS-MeMBer)滤波器存在的势偏问题,文献[27]提出了一种基于杂波量测集约束的改进MS-MeMBer滤波器,提升了滤波性能。针对基于RFS的多传感器势概率假设密度滤波器(multi-sensor CPHD, MS-CPHD)[28]无法形成航迹的问题,代贝宁等[29-30]通过为高斯分量分配标签,以及航迹管理策略实现了航迹创建、维持和终止。基于标签RFS滤波后验密度的GCI融合[31-33]能够估计航迹,但是存在标签不一致(不同节点为同一目标分配不同标签)等问题,即使采用诸如免标签(label-free, LF)、标签匹配(label matching, LM)方法解决上述问题,但也存在计算困难、局部最优等挑战。除了GCI融合,WAA融合准则也已经应用于PHD、MeMBer滤波后验密度融合[20,34]。虽然其有较好的互补特性从而有效降低了漏检,但其性能受后验分量关联(components association, CA)影响巨大,截止当前并没有有效解决[20]。
鉴于TPHD滤波器[14]在状态估计和航迹管理方面的优良性能,将其扩展至基于GCI准则的DMMT具有广泛的理论和现实意义。然而,直接基于TPHD开展后验密度的GCI融合存在如下挑战:① 节点间传递后验TPHD所需通信负载大;② 简单融合易产生反直观的错误航迹;③ 普遍存在因节点势分布不一致而导致的漏检。针对上述挑战,本文在高斯混合(Gaussian mixture, GM)TPHD滤波的基础上,提出了融合后验航迹估计而非后验航迹密度的策略,以降低通信负载。该方法还采用航迹最优匹配技术降低融合航迹错误率高的问题;针对GCI融合存在漏检问题,基于概率生成泛函严格推导了一种鲁棒TPHD融合方法。仿真实验验证了所提算法在实时性和状态估计精度方面的有效性。
1 TPHD滤波器

对于DMTT,典型特点是单节点的处理能力和计算资源有限,因此尽可能减少本地节点内计算和节点间数据通信是至关重要的[33]。下面重点介绍高斯混合实现形式的TPHD滤波器,这是本文多传感器多目标跟踪方法的基础。
单航迹的高斯密度表示为
(1)
式中:νk=dim(mk)/nx;tk、νk、mk∈Rνknx、Pk∈Rνknx×νknx分别表示单航迹的起始时间、持续步长、均值和协方差。
TPHD滤波器服从如下假设:
假设 1目标存活概率为ps,其动态转移概率密度为g(xv|xv-1)=N(xv;Fxv-1,Q)。
假设 2目标检测概率为pd,其量测似然为l(z|x)=N(z;Hx,R)。
假设 3k-1时刻多航迹概率密度fk-1(·)表示多航迹泊松随机有限集的概率分布。
假设 4新生泊松多航迹密度βk的PHD为
(2)

在假设1~假设4的前提下,TPHD通过时间更新和量测更新实现。设fk-1(·)的TPHD为
(3)
预测泊松密度πk的TPHD为
(4)
(5)
(6)
式中:T和⊗分别表示转置运算和克罗内克积(Kronecker product)。
(7)
不妨设πk(·)的TPHD为
(8)
则fk(·)的量测更新TPHD为
Dfk(·)=(1-pD)Dπk(·)+
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
式中:κk(z)为服从泊松分布的虚假量测。
随着时间的推移,航迹的长度会增加,因此直接实现TPHD会带来较大的计算负载。为了解决该问题,可采用L-Scan[14]策略实现,其传播每个分量最后L步状态的联合高斯密度和历史状态的独立高斯密度。该方法具有严格的KL(Kullback-Leibler)散度解释[14],其当前时间步的测量只对最近时间步的轨迹状态估计有显著影响。
航迹估计采用文献[6]中的方法,其中估计航迹数为
(17)
估计航迹TPHD为
(18)
2 GCI融合及实现
考虑分布式传感器网络[17]包含传感器节点集G={1,2,…,Gs},各传感器均有感知、滤波和通信能力。假设节点s∈G的量测更新密度为fs,则基于GCI准则的融合概率密度可以表示为
(19)
式中:ωs为满足∑s∈Gωs=1的融合权重。从信息论的角度,GCI准则是求解与节点后验概率密度KL散度加权求和最小的融合概率密度fω(X):
(20)
(21)
为了后文符号的简化,仅考虑不同节点量测更新后的PHDDfs1,Dfs2:
(22)
则Dfs1,Dfs2的GCI融合为
(23)
(24)
(25)

(26)

实际中将基于PHD的GCI融合算法[17]直接应用于TPHD融合存在通信代价大、航迹空间不匹配及漏检问题。
如式(23)所示,PHD-GCI实现需要融合节点间所有的高斯分量,这将导致大量的计算负载。尽管可以通过剔除权重低于门限的高斯分量以减少分量融合,但节点间传播后验概率假设密度涉及的参数需要较大的通信代价[35]。针对该问题,可以采用局部共识策略,即节点间只传递权重大于门限wc的高斯分量,从而达到降低通信代价的目的。

3 鲁棒TPHD-GCI融合
针对TPHD与GCI的简单组合运用存在的问题,本文在TPHD后验航迹估计的基础上,提出了基于航迹关联(trajectories association, TA)的GCI融合跟踪方法,记为TPHD-TA-GCI方法。提出了一种节点间的航迹关联算法,解决了航迹空间不一致的问题且为航迹分量融合并行化奠定了前提和基础;最后基于概率生成泛函推导了一种鲁棒航迹分量融合方法。
3.1 最优TA

(27)

(28)
则第g个模糊因素判决两航迹相似的隶属度为
(29)
(30)

(31)

(32)
其中,
(33)
式中:ε为关联截止半径。航迹匹配的目的是求解最优分配矩阵W(k)
(34)
式中:Wij∈{0,1},∀i,j,W(ns1+1)(ns2+1)=0,使其在满足式(36)和式(37)约束的条件下,总体关联代价Ca(k)最小。Ca(k)可表示为
(35)
(36)
(37)
如果Wij(k)=1表示Xi航迹与Xj航迹匹配;如果W(ns1+1)j(k)=1表示航迹Xi与Xj未匹配,反之亦然。针对上述约束,本文采用Kuhn[37]提出的匈牙利算法在多项式时间内解决航迹匹配问题。
3.2 节点间TPHD切分和融合

(38)
(39)
(40)

(41)
(42)

(43)
(44)
(45)


(46)

(47)
根据文献[6]可得
(48)


(49)
进一步可得融合航迹集合Xfuse的概率生成函数
(50)
因此可得融合航迹集合Xfuse的TPHD为
(51)
将式(43)、式(46)代入式(51)可得融合航迹集合Xfuse的TPHD为
(52)
由于上述融合过程只针对估计航迹集合进行,所以显著降低了运算复杂度,航迹匹配策略使得融合完全并行,进一步降低了运算复杂度,且解决了航迹空间不匹配的问题。对于非匹配航迹,剔除了持续时间小于门限的航迹,减少了错误航迹。
4 数值实验
为了验证所提算法的先进性和有效性,考虑具有两个传感器的分布式网络在二维区域A=[0,2 000]×[0,2 000]内跟踪10个目标,如图1所示。

图1 真实航迹Fig.1 True trajectories
图1中真实航迹由实线表示,航迹起始位置用圆圈标记,航迹起始时间和长度(t,v)位于航迹的终止位置。各节点分别采用文献[14]中的L步扫描的TPHD滤波器。考虑包含位置和速度的单目标状态x∈R。单目标存活概率ps=0.99,单目标马尔可夫转移密度为g(xk|xk-1)=N(xk;Fxk-1,Q),其中目标状态转移矩阵F和状态协方差Q分别为
(53)
式中:ι=1;q=0.25。单目标量测方程为l(z|x)=N(z;Hx,R),其中量测矩阵和量测噪声协方差分别为H=[1,0,0,0;0,0,1,0],R=I2。观测区域的杂波服从强度为κ(z)=50·1/106·1A(z)的泊松分布,每次扫描平均产生50个误警。对于航迹匹配,其权重a=(0.55,0.35,0.1),展度为
(54)
(55)

分别将所提算法与基于PHD的GCI融合[24](PHD-GCI),基于PHD的WAA融合[20](PHD-WAA),以及基于伯努利与伯努利的洪泛算术平均融合[34](Bernoulli-to-Bernoulli-Arithmetic-Average-Flooding, B2B-AA-Flooding)算法进行对比。对于不同算法,基于广义最优子模式分配(generalized optimal sub-pattern assignment, GOSPA)[38]度量的均方根(root mean square, RMS)误差进行评价,RMS的表达式如下
(56)

(57)

式(56)表示的RMS误差如图2所示。由图2可知,TPHD-TA-GCI融合算法性能最好,其次是B2B-AA-Flooding算法。PHD-GCI[24]算法的性能最差。

图2 融合算法GOSPA度量误差Fig.2 GOSPA metric error of the fusion methods
为了彻底分析不同融合算法的性能差异,考虑GOSPA度量的分解误差和目标势估计,如图3所示。其中分解误差包括:位置误差图3(a),漏检误差图3(b),误检误差图3(c)。

图3 估计目标的GOSPA度量误差分解和势Fig.3 Decomposition of the GOSPA metric error for the estimated targets, and Cardinality
位置误差是指正确估计目标状态与对应真实目标状态之间的差异。由图3(a)可知,TPHD-TA-GCI融合的位置估计精度最高,这是因为TPHD的量测更新过程考虑了多步信息,此外有效的航迹关联算法和协方差交集融合进一步提升了航迹状态估计的精度。在目标生成和消亡时刻,所有算法的位置误差都会增加。
由图3(b)可知,所提算法的漏检目标最少,其次是PHD-WAA和B2B-AA-Flooding,PHD-GCI 融合漏检最严重。尽管PHD-WAA和B2B-AA-Flooding融合都具有互补特性,但两者受到不同节点信息不一致的严重影响,进而导致漏检。由于所提算法融合了关联航迹,保留了不同节点估计的非关联航迹,因此其漏检最少。由图3(c)可知,TPHD-TA-GCI具有较小的错误目标估计,验证了其关联和融合算法以及虚假目标剔除策略的有效性。对比图3(b)和图3(c)可知,PHD-WAA融合算法在提升目标检测性能的同时也增加了目标的误检概率。图3(d)给出了不同融合算法的目标势估计结果。显然,PHD-GCI算法的目标势估计精度最差,特别是目标数较多的情况下。PHD-WAA存在目标数过估计的现象,因为其估计了更多的错误目标。TPHD-TA-GCI和B2B-AA-Flooding具有相似的势估计性能。
为了直观表现算法性能,表1给出了不同算法在所有时间步的平均误差。
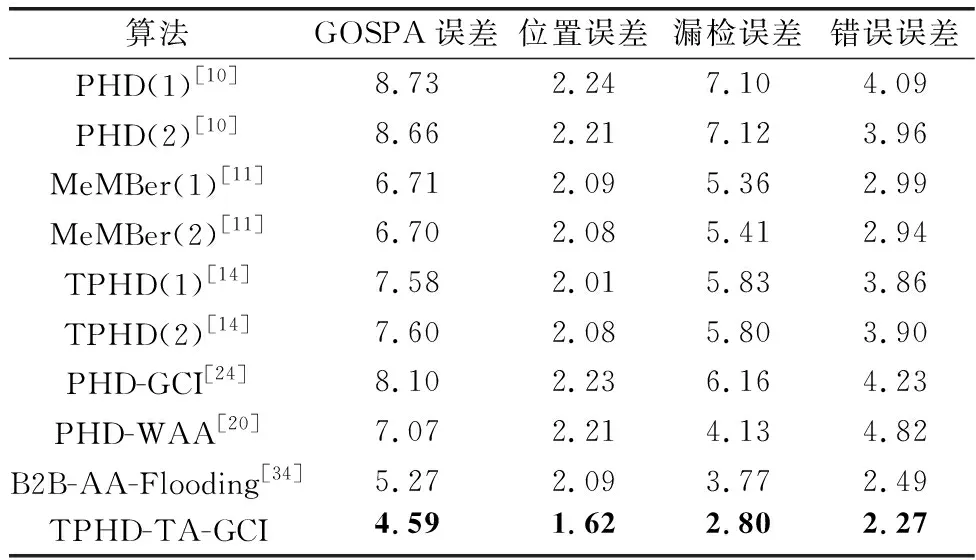
表1 RMS GOSPA度量误差
由表1可知,相比经典PHD-GCI和PHD-WAA算法,所提算法的GOSPA误差分别降低了43%和35.08%。相比B2B-AA-Flooding算法,所提算法的GOSPA误差、位置误差、漏检误差分别降低了12.90%、22.49%、23.61%。
为了验证所提算法的实时性,对比了不同融合算法在2.3 GHz英特尔i7-10510U处理器单次运行的时间。PHD-GCI,B2B-AA-Flooding,PHD-WAA,TPHD-TA-GCI的运行时间分别为0.57 s,0.46 s,0.23 s,0.10 s。显然所提算法的实时性最好,这是本文采用后验航迹估计进行融合处理带来的优势。
5 结 论
本文基于TPHD提出了一种鲁棒分布式TPHD-TA-GCI滤波器,其中包括采用了节点间航迹匹配和基于概率生成泛函的TPHD融合技术。采用的航迹匹配技术可用于解决DMMT中的标签匹配[32]问题。而基于概率生成泛函的TPHD融合技术也适用于传感器视场受限条件下的DMMT,具有很好的工程应用价值。下一步的研究工作包括多传感器误差配准和异构传感器信息融合。
