基于稀疏阵列天线的FMCW 雷达测距系统设计∗
2024-01-29李文博
向 臻,王 斌,李文博
(重庆邮电大学光电工程学院,重庆 400065)
随着社会的发展以及工业的进步,雷达被广泛应用于人们的生活中,如工程机械、工业液位[1-3]、医疗器械、汽车辅助驾驶[4-6]等。调频连续波(Frequency Modulated Continuous Wave,FMCW)雷达因具有高分辨率、无距离盲区、抗干扰能力强等优势,逐渐成为领域内的研究热点[7-10]。目前,低频段的雷达主要应用于近距离探测,而高频段雷达主要应用于远距离探测,因此雷达的距离测量范围主要在于雷达所选择的工作频率以及其发射功率。2016 年,陈天琪等[11]报道了一款24 GHz FMCW 车载测距雷达。该雷达系统在12 m~90 m 范围内的测量误差不超过10%。2018年,国外学者Jeon 等[12]报道了一款工作于W 波段的FMCW 雷达。该雷达具有两路发射通道和两路接收通道,并且拥有较高的发射功率,该雷达可以完成150 m 内目标的测量,实现了较大的测距范围。
低频段雷达主要应用于近距离测量,因此雷达的测量精度成为了研究的重点。2014 年,梁宇强[13]设计了一款FMCW 雷达水位计。该雷达包括波形发生器、24 GHz 雷达传感器、信号采样与处理模块和实时显示模块。雷达采用锯齿调制波驱动雷达传感器工作。该水位计在7.5 m~8.0 m 范围内的相对测量误差在±1%以内。同年,Ju 等[14]设计了一款应用于自动驾驶的24 GHz FMCW 雷达。该雷达射频模块由一个发射机和一个由5 个单元组成的发射天线阵列组成。实验结果表明,该雷达系统在0.5 m~3.4 m 范围内误差小于3 cm,实现了较好的测量精度。2017 年,陈阿辉[15]设计了一款应用于物位测量的FMCW 雷达。该物位测量系统由五个部分组成,分别是信号处理与控制模块、HART 通信模块、电源模块、红外输入与LCD 显示模块以及雷达收发模块。测试结果表明,所设计的FMCW 雷达物位测量系统可以正常工作,测距精度为±15 mm,满足工业现场的物位测量需求。2018 年,付炎松[16]研究并制作了一款工作于24 GHz 的汽车防撞雷达。在1 m~15 m 的静态测量中,其误差小于0.3 m。2021 年,何仁杰[17]研究并制作了一款液位测量雷达。在5 m 内的误差平均值为量程的2.6%,即平均误差为0.13 m。虽然高频段雷达主要应用于远距离探测,但是依然有学者将其应用于近距离探测,并取得了较好的效果。2018 年,姚金杰等[18]提出了基于122 GHz FMCW 测距雷达的活塞位移测量方法。通过设计聚焦透镜,提高了122 GHz毫米波的穿透能力,实验结果表明,在2 m 液压储能器活塞测试中,测距误差小于2 cm,实现了较高的精度。
此外雷达的分辨率也是领域内研究的热点之一,2020 年,张佳琦[19]设计了一款超宽带雷达系统。该系统由超宽带收发链路、超宽带天线阵列和信号采集模块组成。为满足雷达系统对收发天线带宽的需求,其设计了一款16 单元的印刷偶极子天线阵列,采用多节不等功分馈电网络对天线单元馈电,天线测试结果表明,在4.5 GHz~6.5 GHz 频段内,回波损耗大于10 dB,增益大于15 dBi,该雷达具有2 GHz 的调制带宽,实现了较高的分辨率。同年,国外学者Welp 等[20]提出了一款工作于94 GHz 的FMCW 雷达。该雷达具有26 GHz 的调制带宽,并且发射功率高达19.7 dBm。该雷达具有较高的分辨率和较小的误差,以及较大的测量范围。
综上可知,目前大多数的雷达设计均没有对收发天线进行优化设计,大多采用成熟的射频前端。而天线作为雷达系统中不可或缺的关键器件之一,其性能好坏直接决定了雷达的整体性能。因此,本文以雷达天线为基础,首先设计了一款应用于24 GHz 雷达测距系统的窄波束、低副瓣阵列天线,然后基于BGT24MTR11 芯片,设计、制作并测试了一款工作于24 GHz 的雷达测距系统。系统采用三角波线性连续调频的方式,在1 m~10 m 范围内实现了小于0.1 m 的测量误差,可为工作于24 GHz 的FMCW 雷达测距系统设计提供参考。
1 测距原理与系统架构
1.1 测距原理
本文采用三角波线性连续调频的方式产生发射信号,因此发射信号的频率随时间呈现三角波的变化形式,接收信号的频率随时间也呈现三角波的变化,和发射信号相比,接收信号的频率在时间上有一定的延迟,发射信号和接收信号频率随时间的变化如图1 所示。
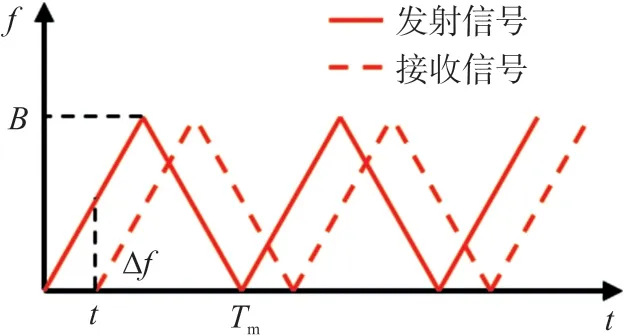
图1 发射信号与接收信号的时频原理示意图
根据三角形相似可以得到:
式中:d为目标距雷达的距离,c为光速,Tm为调制周期,B为调制带宽,Δf为解调后的中频频率。
根据式(1)可知,当确定了调制周期和调制带宽后,目标的距离和解调后的中频频率呈现线性关系,因此,只需要测量出解调后的中频信号频率即可求解出目标的距离。
1.2 系统构成
本文采用Infineon 公司推出的BGT24MTR11 芯片作为射频收发电路模块的核心器件。系统的结构框图如图2 所示。
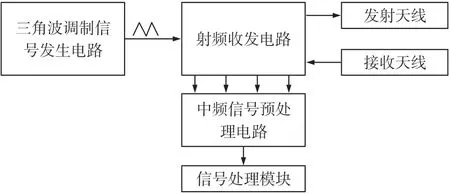
图2 系统结构框图
雷达工作时,三角波调制信号发生电路产生的三角波控制BGT24MTR11 芯片的压控振荡器(VCO),产生三角波调频信号。调频信号首先通过发射匹配电路,然后由发射天线发射,当发射信号遇到目标后发生反射,接收天线接收到反射信号,并通过接收匹配电路送入混频器后,形成中频信号,中频信号经过预处理后送入数据处理模块中,进行目标距离信息的提取。
2 系统设计
2.1 低副瓣稀疏阵列天线的设计
微带天线阵列因具有较低的剖面高度、易于集成、增益容易调节、成本较低等优点被广泛应用于雷达收发天线。宽波束天线在复杂环境下对目标进行测量时,中频信号频谱复杂,对信号处理的要求较高。而窄波束、低副瓣天线在复杂环境下可以有效地减弱环境的影响,频谱相对纯净,相对于传统的宽波束天线而言,窄波束天线在复杂环境中具有更大的优势。因此本文采用低副瓣、窄波束微带阵列天线来接收和发射电磁波。设计中,首先利用切比雪夫低副瓣阵列综合理论设计了一款8×8 的微带天线阵列,采用基于遗传算法优化的稀疏布阵方式进一步降低该天线的副瓣电平。将副瓣电平的预期值设置为-26 dB,利用MATLAB 综合出8 元线阵的归一化电流比为:
将上述电流比应用于8×8 平面阵的设计中,阵元间距采用一个介质波长。
图3 为8×8 阵列天线的辐射方向图仿真结果,8×8 阵列天线的主瓣最大增益为23.8 dBi,在φ=0°和φ=90°方向上的副瓣电平均在-26 dB 以下,天线阵列实现了低副瓣特性;并且天线阵列在φ=0°和φ=90°方向上的波束宽度均为12.5°左右,满足窄波束的设计要求。
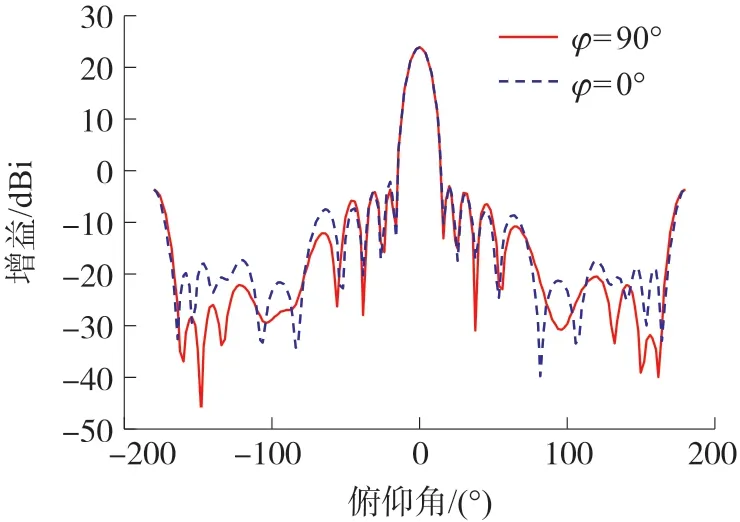
图3 8×8 阵列辐射方向图仿真结果
为了进一步降低上述阵列天线的副瓣电平,采用遗传算法对阵元分布进行优化设计。基本流程为:①选择合适的稀疏率,生成随机种群;②选择合适的适应度函数,并计算适应度;③做选择、交叉、变异运算;④终止条件判断;⑤满足条件则输出结果,不满足条件则继续迭代。
假设阵列平面位于yoz平面内,并设阵元方向图满足全向性,则其阵列方向图可表示为:
式中:Amn表示单元馈电幅度,dm和dn分别表示y方向和z方向的距离,λ为波长,θ0和φ0表示阵列的主瓣指向。
设计中,利用稀疏阵列的方式来对天线阵元分布进行优化,可以用fmn表示相应阵元的工作状态,fmn=1 表示相应位置上有阵元,fmn=0 表示相应位置上没有阵元。则上述阵列方向图可以表示为:
同时,为了保证稀疏后的阵列方向图主瓣宽度不发生较大改变,则需要保证天线口径不变,即天线阵列四个角上的单元需要保留下来;此外,为了简化馈电网络的设计与实现,需要稀疏后的阵列具有一定的对称性。因此需要对fmn进行约束,其约束条件如下:
上述约束条件表示在平面阵的四个端点处存在阵元,并且平面阵的阵元分布满足上下、左右均对称。
图4 为稀疏前与稀疏后阵列天线的辐射方向图,可以发现,经过稀疏布阵后,稀疏阵列方向图相比于8×8 阵列方向图的副瓣电平得到较为明显的改善。稀疏阵列在φ=90°方向上副瓣电平改善了4.5 dB,在φ=0°方向上副瓣电平改善了6.8 dB。上述仿真结果表明,所采取的设计方法可有效地降低天线的副瓣电平值。
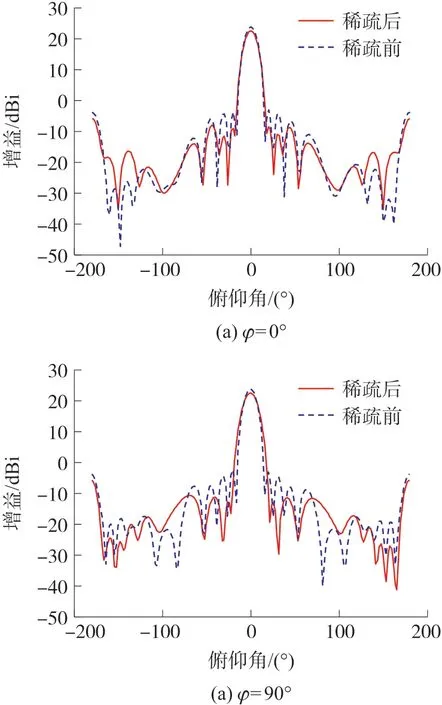
图4 稀疏前后阵列天线的辐射方向图。
针对该稀疏阵列天线设计了馈电网络,并对该阵列进行加工测试。稀疏阵列天线的模型如图5所示。
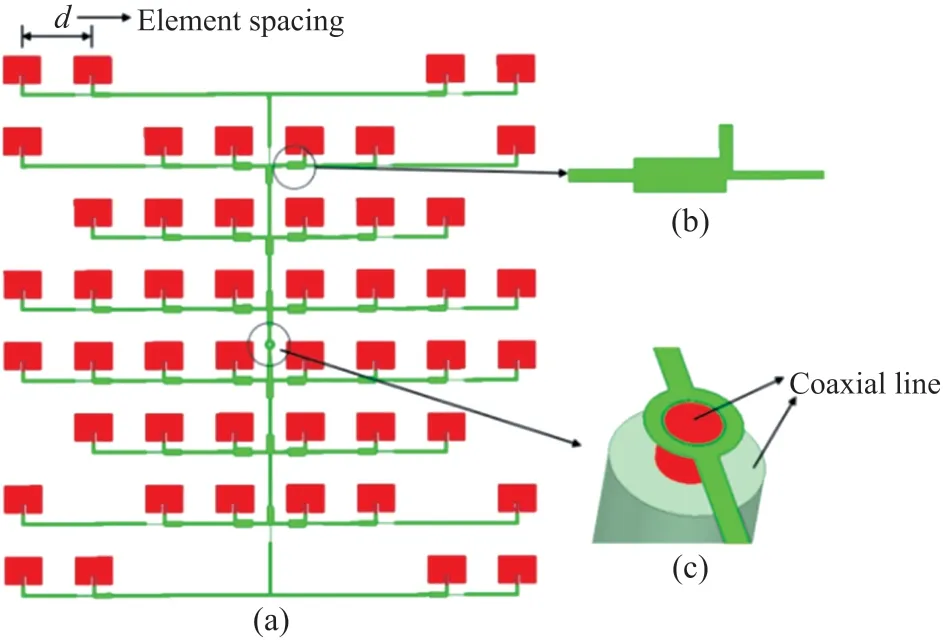
图5 稀疏阵列天线结构
该稀疏阵列天线由48 个矩形单元组成,阵元分布是由8×8 的微带阵列通过遗传算法稀疏16 个阵元后的结果。为了方便馈电网络的设计和避免引起栅瓣,阵元间距采用一个波导波长。馈电网络采用T 型功分结构,利用串并联混合结构对单元进行馈电。该天线阵列印制在厚度为0.508 mm 的Rogers 4350B 薄板上(介电常数为3.66,损耗角正切为0.001)。天线利用同轴线在其中心进行馈电。
图6 为稀疏阵列天线 和增益仿真与测试结果的对比图。仿真得到的S11小于-10 dB的阻抗带宽为1.38 GHz(23.35 GHz~24.73 GHz),实测-10 dB阻抗带宽为1.47 GHz(23.6 GHz~25.07 GHz)。测试结果相较于仿真结果带宽基本保持不变,但整体向高频移动了250 MHz。仿真得到的天线增益为21.5 dBi,在工作频段内保持稳定,测试得到的天线增益在21 dBi 附近波动,但波动范围较小,增益稳定性较好。
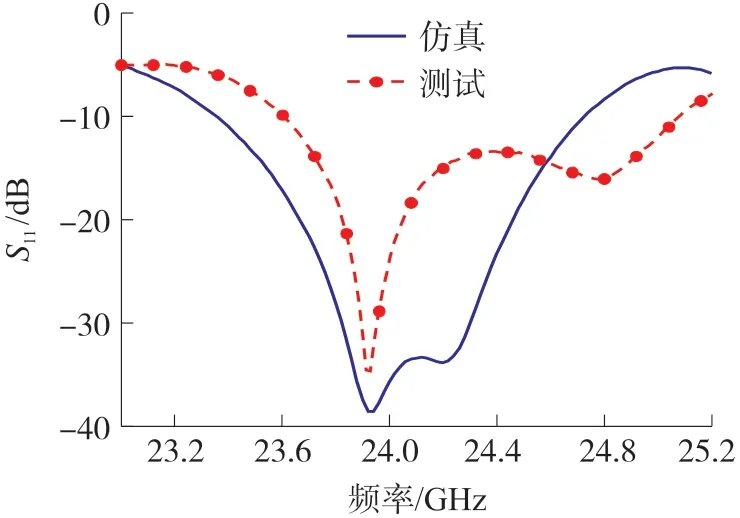
图6 稀疏阵列天线S11和增益的仿真与测试结果
图7 为稀疏阵列天线在φ=0°和φ=90°方向上辐射方向图的仿真与测试结果对比图,仿真中,在φ=0°方向上的主瓣增益为21.5 dBi,副瓣电平为-28.8 dB,半功率波束宽度为13.4°;在φ=90°方向上的主瓣增益为21.5 dBi,副瓣电平为-25 dB,半功率波束宽度为12.9°。测试结果表明,天线在φ=0°和φ=90°方向上的副瓣电平、增益、半功率波束宽度性能和仿真结果基本一致。
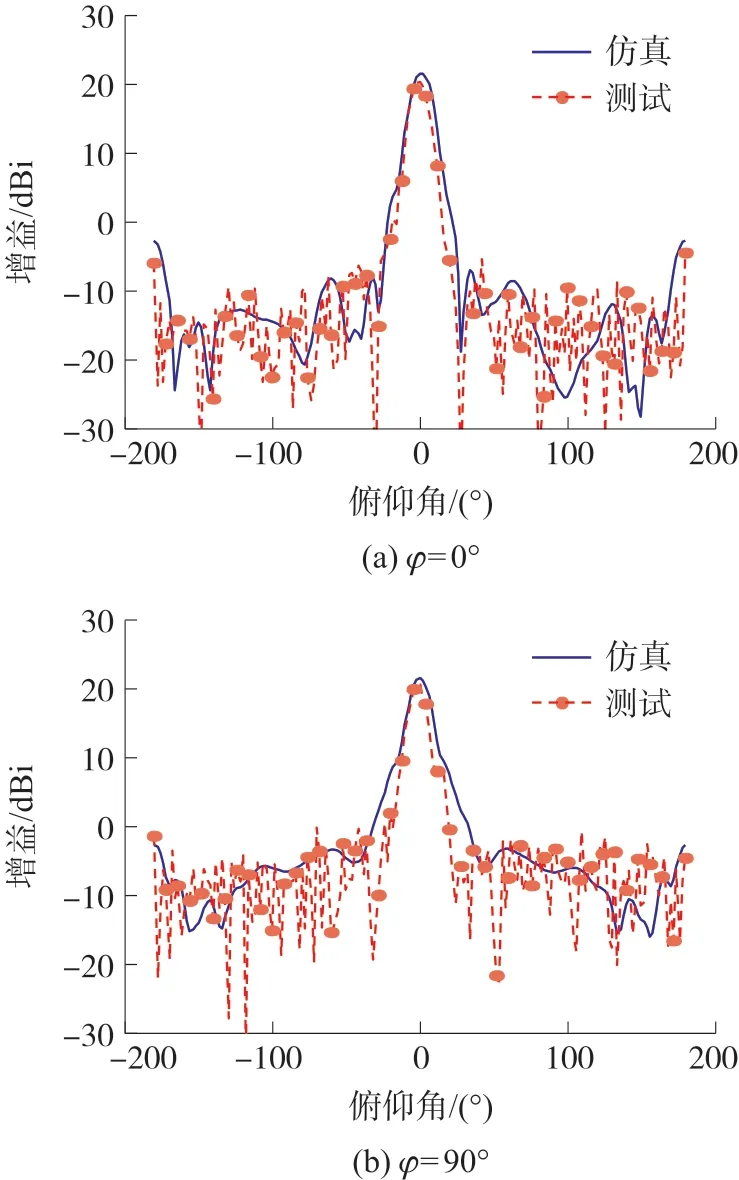
图7 稀疏阵列天线辐射方向图测试和仿真结果
2.2 三角波调制信号发生电路的设计
本文采用的雷达波形为三角波线性连续调频波,因此需要一个三角波调制信号发生器。当前大多数雷达采用直接数字综合结合数模转换器的方式实现调制信号的生成,这种方式通过软硬件相结合,相比于由硬件电路产生三角波调制信号而言,该方法系统较为复杂,因此本文使用硬件电路直接实现三角波调制信号的产生,并根据VCO 对调制信号幅度的要求使用运算放大器实现了调制信号幅度的调整。ICL8038 是一种能够产生高精度三角波、正弦波、方波等波形的芯片,并且所需外围部件较少,频率可由外部电阻和电容在0.001 Hz~300 kHz 范围内选择,其产生的三角波非线性仅为0.1%,是作为三角波信号发生电路的良好选择。图8为三角波调制信号电路原理图。
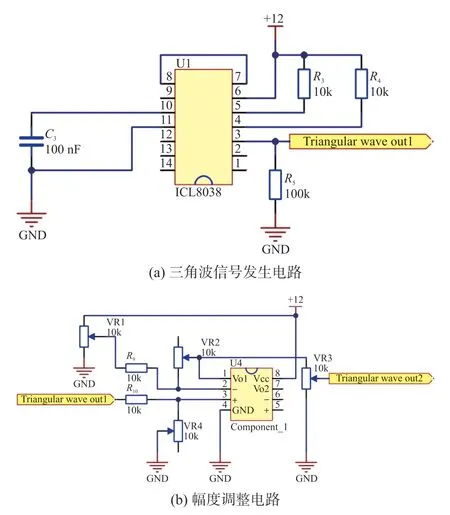
图8 三角波调制信号电路原理图
根据技术手册,图8 中R3和R4用于控制三角波的上升时间和下降时间,R3、R4和C3共同决定了三角波的频率。按照系统设计要求,采用上升时间和下降时间相等的三角波信号,并且三角波的频率设置为300 Hz。对于给定的频率有多种R和C可以选取,但为了获取最佳的性能,电容充电电流的大小将会受到一些限制,参考技术手册,充电电流小于1 μA和充电电流大于5 mA 是不可取的。当将ICL8038 的7、8 引脚短接后,并采用单电源供电,电容的充电电流可由以下公式计算:
式中:R1=11 kΩ,R2=39 kΩ 由芯片内部决定。设计中选取R3=R4=10 kΩ,用来保证三角波上升时间和下降时间相同,并且将电容的充电电流控制在264 μA 左右。
图9 为ICL8038 输出信号的波形和该信号通过幅度调整电路后的波形图。可以发现,芯片输出了一个频率稳定的三角波。该三角波的电压最大值为8 V,电压最小值为4 V,与技术手册提供的电压最大值为供电电压的2/3 和电压最小值为供电电压的1/3 相吻合,但其频率为295 Hz 左右,与设计频率存在一点小的偏差,这种偏差是由于电阻和电容有5%的误差所引起的。此外,本文要求VCO 的输入端三角波的幅度最小值为0.5 V,最大值为1.1 V。因此,需要对该信号进行幅度调整,设计中采用集成运放构成运算放大器对该信号进行幅度调整,可以发现,经过调整后的三角波电压最小值为0.51 V,最大值为1.1 V,并且其频率基本没有发生改变,仍然为295 Hz 左右,满足设计要求。
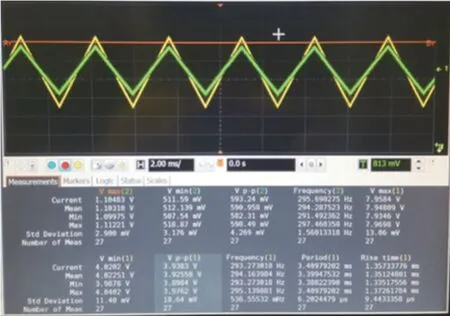
图9 三角波调制信号测试结果
2.3 射频收发电路设计
BGT24MTR11 是英飞凌公司的一款单发单收集成芯片,芯片集成了压控振荡器、混频器、功率放大器和低噪声放大器等射频收发前端模块。其具有较高的1 dB 压缩点、较低的单边带噪声系数、较高的转换增益和较低的功耗,该芯片采用3.3 V 单电源供电。该芯片提供一路差分射频输出通道,本文根据技术手册制作了输入输出阻抗匹配网络,设计并制作了差分信号到单端信号的功率合成网络。该功率合成网络采用威尔金森功分器进行功率合成,其仿真结果如图10 所示。仿真结果表明,在雷达工作频段内,三个端口反射系数均小于-25 dB,端口匹配良好,并且2,3 端口的隔离度大于22 dB,端口间的隔离度也较好。端口1 到端口2 和端口1 到端口3 之间的相位差为180°左右,满足设计要求。
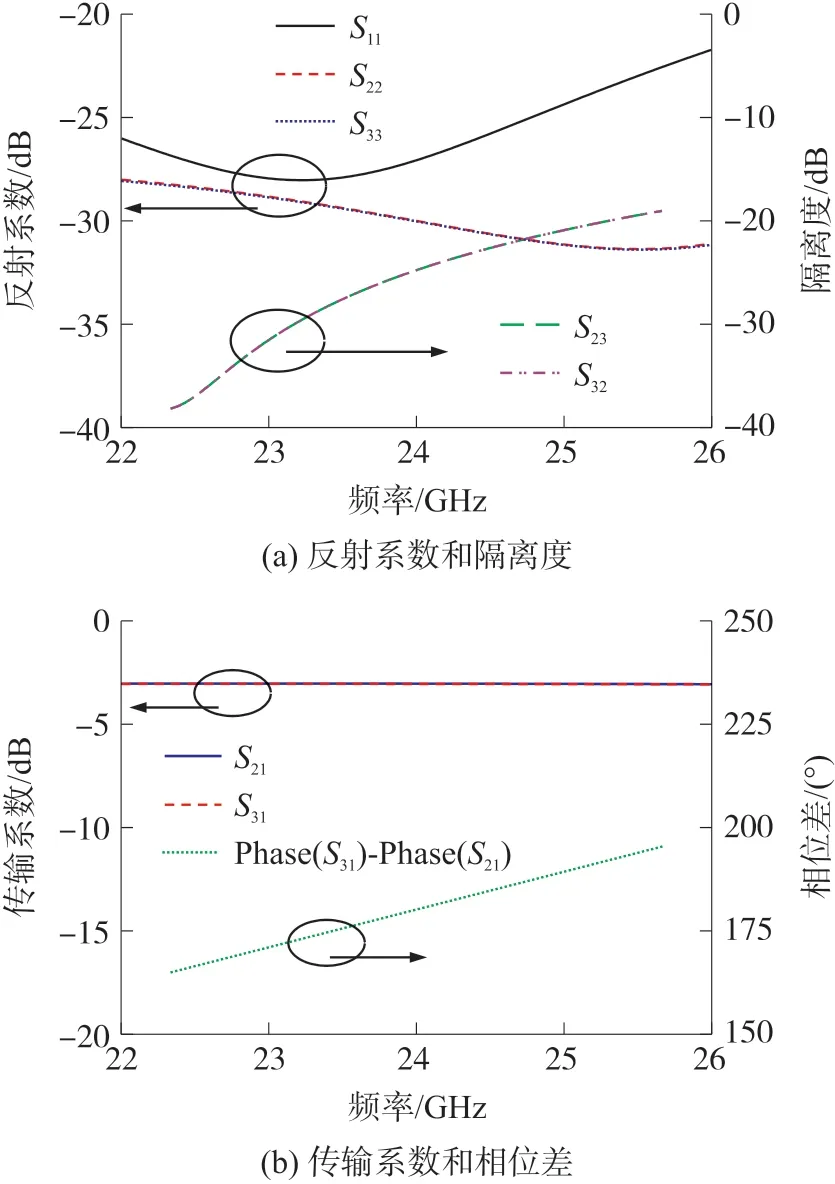
图10 威尔金森功分器仿真结果
利用频谱仪对其发射机的部分性能进行了测试,图11(a)展示了不同供电电压下,VCO 输出频率和功率与VCO 输入电压间的关系。可以发现该VCO 的输出功率在0 dBm 左右波动,当VCO 的输入电压在0.5 V~1.1 V 范围内时,VCO 的输出频率在23.48 GHz~24.66 GHz。因此该雷达的调制带宽为1.18 GHz 左右,其调制周期为3.38 ms。
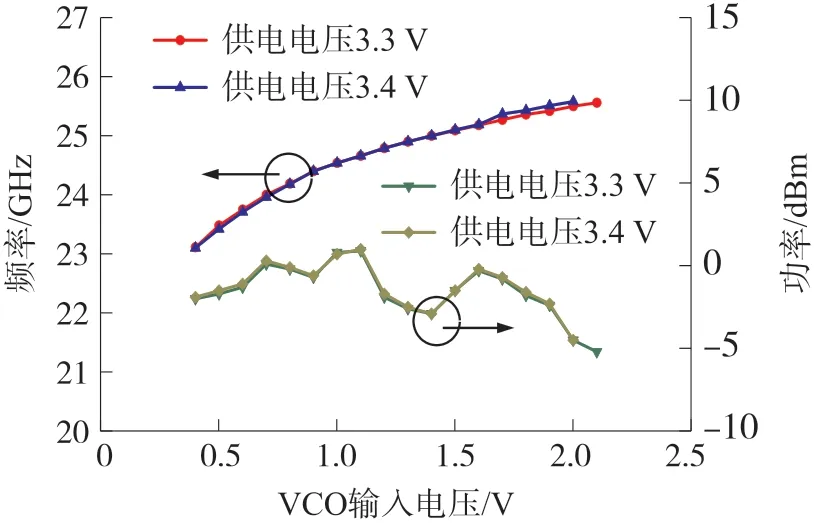
图11 VCO 测试和调频信号测试结果
2.4 中频信号预处理电路设计
由于接收机输出的中频信号较为微弱,因此需对其放大后进行处理,并且为了尽可能地降低调制信号的泄露,在放大器前端采用了一个高通滤波器来减弱调制信号泄露的影响。其放大电路原理图如图12 所示。电路中C1、C2和R1构成一个高通滤波器,通过R6的阻值可以改变放大器的放大倍数,并且该电路可以将BGT24MTR11 芯片提供的差分信号合成单端信号。
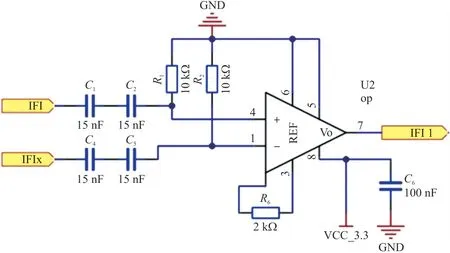
图12 中频信号放大器原理图
3 测试结果及分析
为了验证上述设计的合理性,制作了样机并进行了测试,其系统的实物如图13 所示。
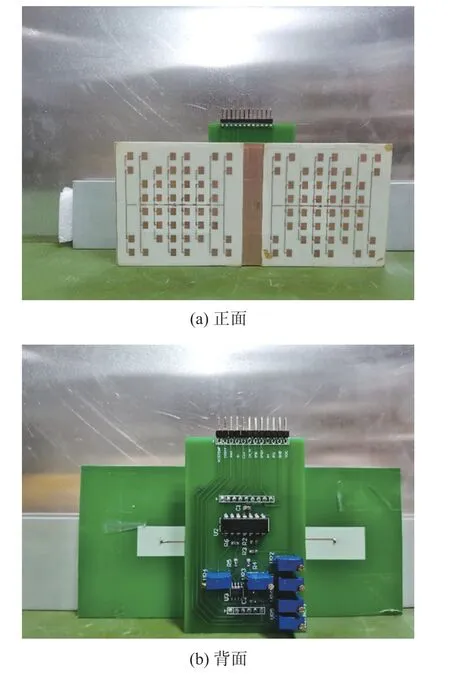
图13 系统实物图
采用示波器对中频信号进行信号采集和频谱分析,在实验室内相对复杂的环境和实验室外相对空旷的环境中完成了定点目标的距离测试,在室内,由于环境距离的限制,选择测量的范围为10 cm~130 cm,室外选择1 m~10 m 范围进行测量。其测试结果如图14 和图15 所示。
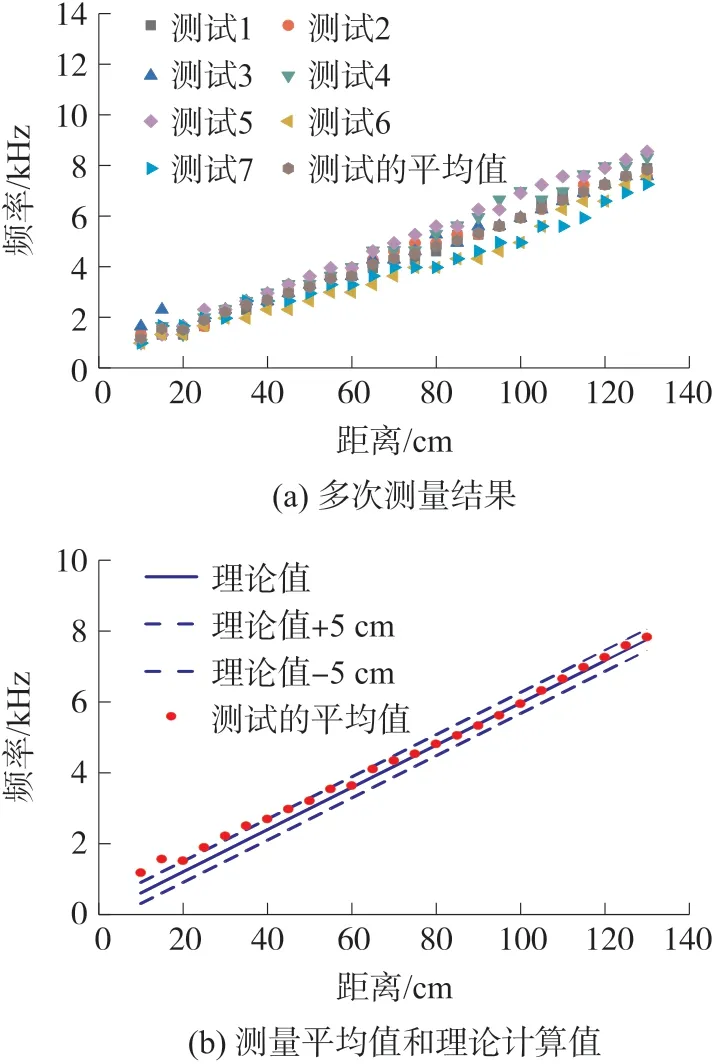
图14 10 cm~130 cm 测量结果
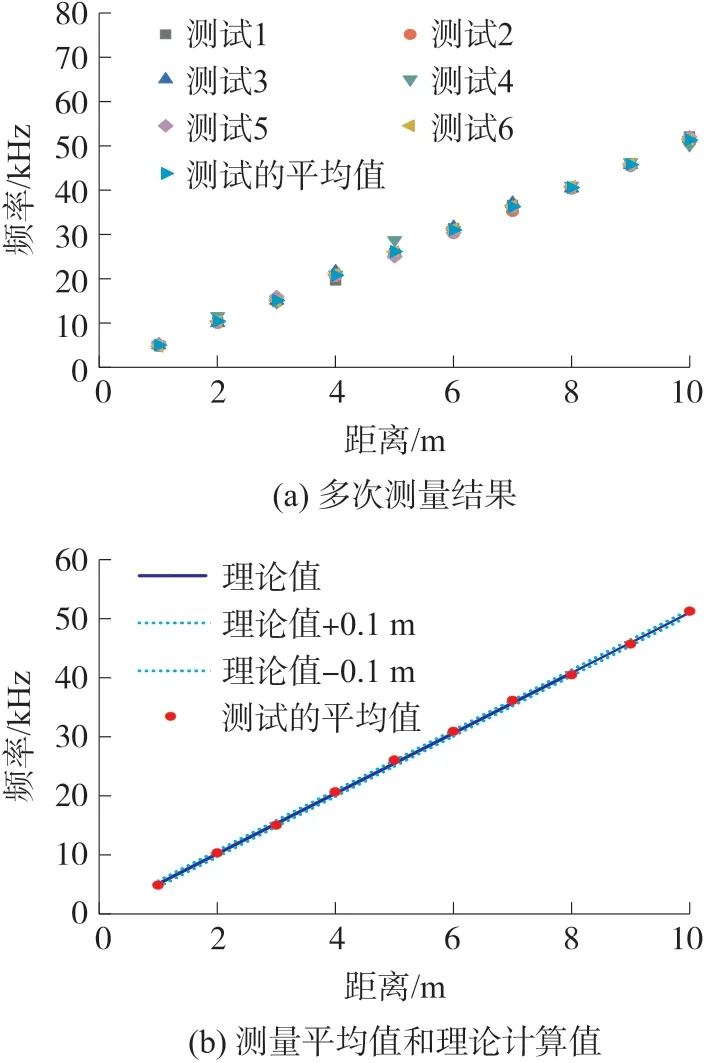
图15 1 m~ 10 m 测量结果
图14(a)为10 cm~130 cm 范围内同一个目标的多次测量结果和测量的平均值,可以发现,该雷达能够发现并测量该范围内的物体。并且多次测量的方差小于0.016。图14(b)为10 cm~130 cm 范围内目标测量平均值、理论计算值和理论值±5 cm 的关系。可以发现,当目标位于40 cm~130 cm 时,雷达测量的误差均在5 cm 内,与理论值吻合较好。而当目标位于10 cm~40 cm 范围内时,雷达测量的误差大于5 cm,而且距离越小,测量误差越大,这是由于在中频信号预处理电路设计时使用了一个高通滤波器,该高通滤波器的主要作用是抑制三角波调制信号,不可避免的是该高通滤波器也限制了雷达的最小测量距离。由于该滤波器的存在,导致2 kHz 以下的信号无法正确读取,即40 cm 以内的目标无法被雷达准确地识别出来。
图15(a)为1 m~10 m 范围内同一目标的多次测量结果和测量结果的平均值,可以发现,在1 m~10 m范围内,雷达能够发现目标并较为准确地测量出目标的距离。多次测量的方差小于0.08 m。图15(b)为1 m~10 m 范围内目标测量的平均值、理论值和理论值±0.1 m 的关系。可以发现,在1 m~10 m 范围内,雷达测量的平均值均在0.1 m 范围内,与理论值吻合较好,具有较高的精度。表1 为所设计的测距雷达和文献中其他雷达的对比。
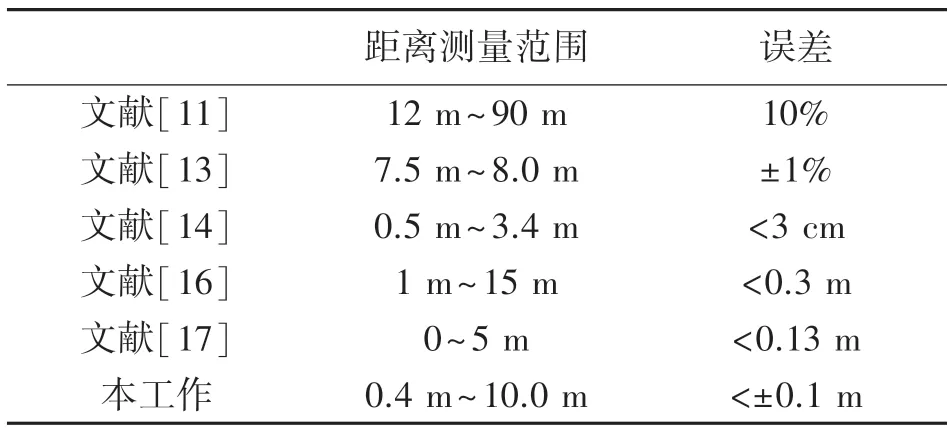
表1 本文设计测距雷达与文献中雷达的对比
4 结论
本文基于Infineon 公司推出的BGT24MTR11 芯片,采用基于遗传算法优化的稀疏阵列天线作为收发天线,提升了系统的抗干扰能力。采用硬件电路代替直接数字综合产生调制信号,设计、制作并测试的一款工作于24 GHz 的雷达测距系统。该系统结构简单,性能稳定,成本较低,可为工作于24 GHz 的FMCW 雷达测距系统的提供设计参考。
