基于超声波的微型化气象站设计在舰船气象监测中的应用研究∗
2024-01-29董天天梅筱语肖钱宇
董天天,郝 曼,丁 晟,梅筱语,黄 乙,肖钱宇
(1.江苏信息职业技术学院微电子学院,江苏 无锡 214153;2.无锡学院自动化学院,江苏 无锡 214105;3.常州大学应用技术学院,江苏 常州 213164)
随着现代舰船的迅速发展,舰船气象监测日益成为一个关键的领域[1-2]。气象数据的收集对于舰船的安全[3]和操作至关重要。海洋气象探测技术手段包括舰船自动气象站[4]、海岛自动气象站[5]和海上浮标气象站等[6-7],这些探测技术主要依靠安装在诸如舰船、岛屿和浮标等平台设施上的各种自动气象站进行各种气象探测。对于舰船观测平台来说[8],船舶顶甲板比较狭小并且需装配各种设备,而传统气象监测设备往往庞大且不易移动,这限制了在船上进行实时气象监测。因此,设计一种微型化气象站成为一个有意义的研究方向[9]。
其中,风速风向传感器在舰船上测风有严格要求[10-12],为了保护仪器免受强风、雨雪的影响,需考虑传感器的材质和使用寿命,而传统三杯式风速风向仪的机械结构决定了海上测量误差不可避免[13-15],长时间使用会导致传感器磨损,影响仪器性能,并且容易受恶劣环境的影响。然而,超声波的特性使其在船上进行气象监测具有独特的优势[16],因为其可以穿透水雾和降雨,并且可以在艰难的环境中工作[17-18]。
为了满足海上复杂环境下气象探测的需求,特别是对海上风速、风向测量,迫切需要开发具有高稳定性、微型化、轻量化和高可靠性的新一代自动气象站和气象传感器。针对海洋气象探测中的一些问题,本文介绍了一款新一代自动气象站和气象传感器,通过一体化设计、数字化传感器、超声波原理测量风速风向等技术手段,解决了传统自动气象站体积大、架设复杂、稳定性和可靠性差等问题。该款自动气象站可实现对六种气象参数的测量,并可通过上位机显示和存储数据。同时,该气象站采用抗干扰滤波措施,具有较强的稳定性和可靠性,通过使用基于超声波的微型化气象站,船员可以更好地了解航行路线的天气条件,从而提高船舶的安全性和效率,适用于海上环境的长期在线监测。
1 舰载气象系统总体设计
系统总体设计结构示意如图1 所示。
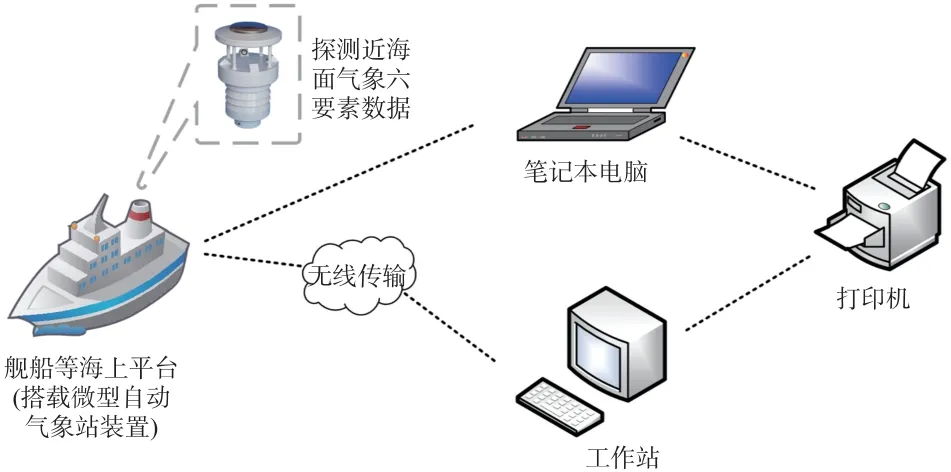
图1 系统结构示意图
整个系统主要包括电源电路、气象传感器电路、主控制单元、数据传输、数据管理、系统测试与试验分析,各部分之间的关系如图2 所示。
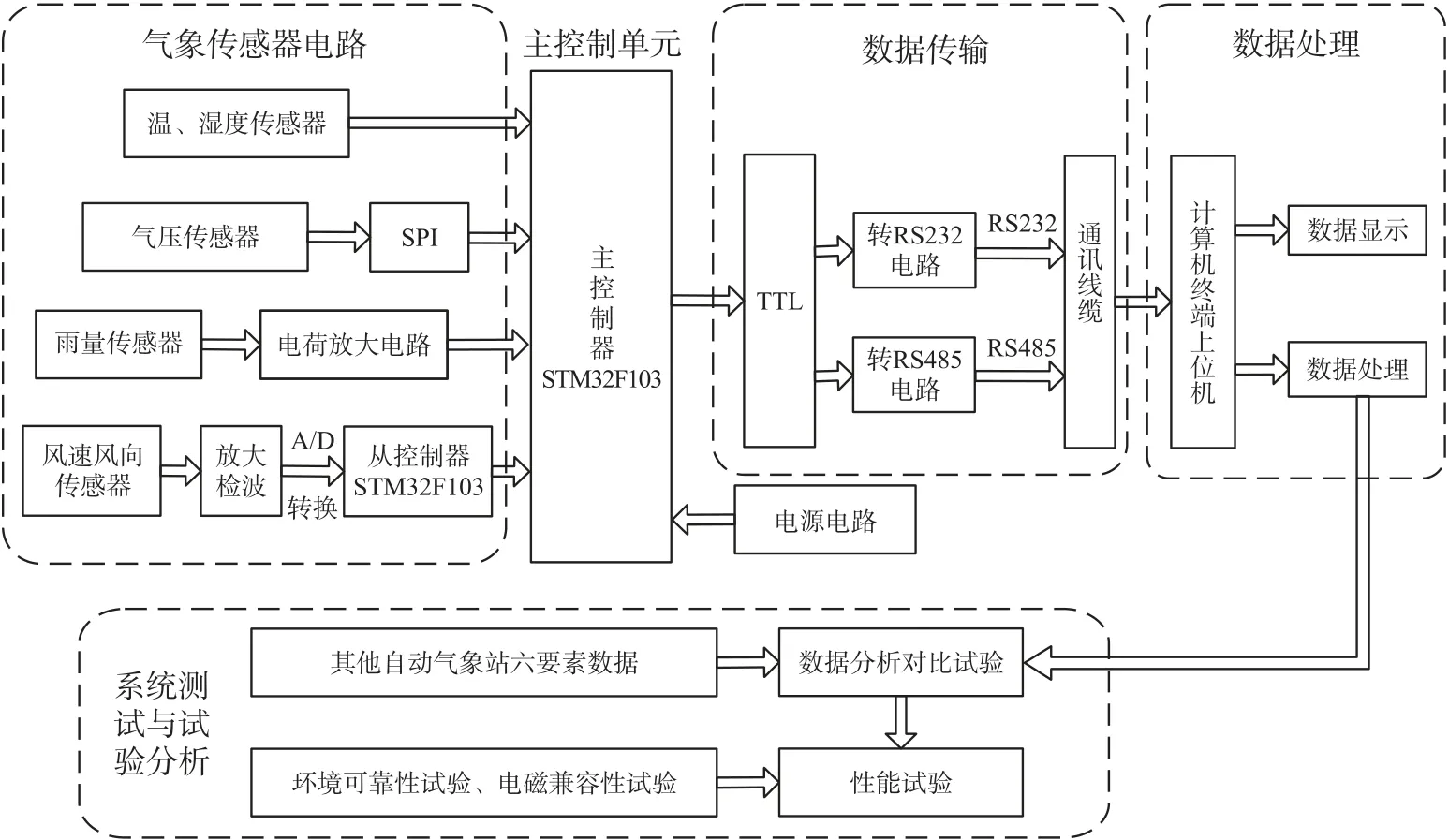
图2 技术路线图
其中,气象传感器电路包括风速风向传感器电路、雨量传感器电路、温湿压采集电路,实现对六要素数据的采集,将温度、相对湿度、气压、风向、风速、雨量参数转化为相应的电信号,并以数字的形式传到主控制单元,输出的信号经过转换电路转化为RS232/RS485 信号,再经过通讯线缆传到上位机终端;通讯线缆是气象传感器和计算机终端间信息传送的物理介质,连接计算机端接口采用USB 接口,数据传到上位机后实时显示和保存。最后对舰载自动站进行试验测试,并结合对比自动气象站数据进行综合分析和试验验证。
2 系统硬件设计
2.1 电源电路
电源电路为自动气象站系统提供稳定的电压,电压的稳定是自动气象站系统正常稳定工作的重要前提。系统各模块所需供电电压情况如表1所示。

表1 主要模块实际供电电压 单位:V
从表1 可知,本设计涉及多路不同电压值的电源,温湿度传感器SHT75、压力传感器MS5540C、STM32F103 均支持3.3 V 电压,而超声波风速风向传感器支持12 V 电压,系统采用12V~36V 宽电源电压输入,因此需要将输入电压转换成3.3 V、5 V和12 V。系统电源设计方案如图3 所示。
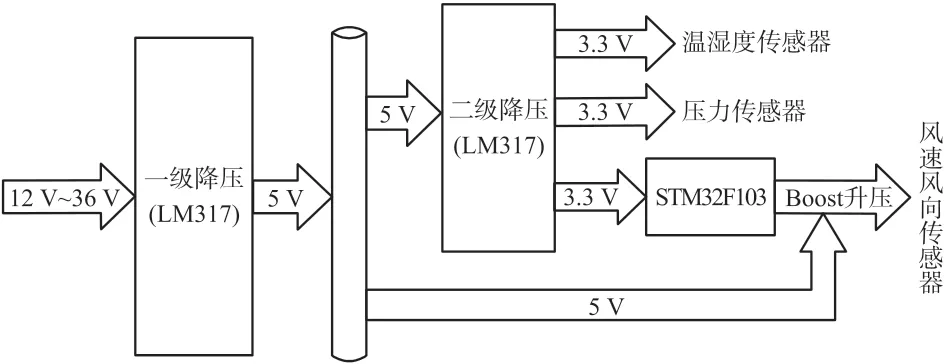
图3 系统电源设计方案
本设计选用LM317 稳压器进行两级降压,第一级采用LM317 稳压器将电压从12 V 降至5 V,然后再使用LM317 稳压器将电压从5 V 降至3.3 V,为控制器及各传感器电路模块提供3.3 V 的电压,保证各模块稳定工作,如图4、图5 所示。
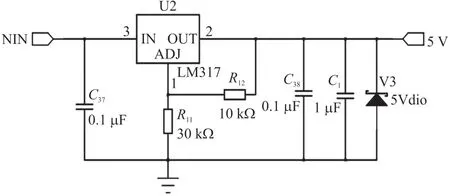
图4 5 V 电源设计方案
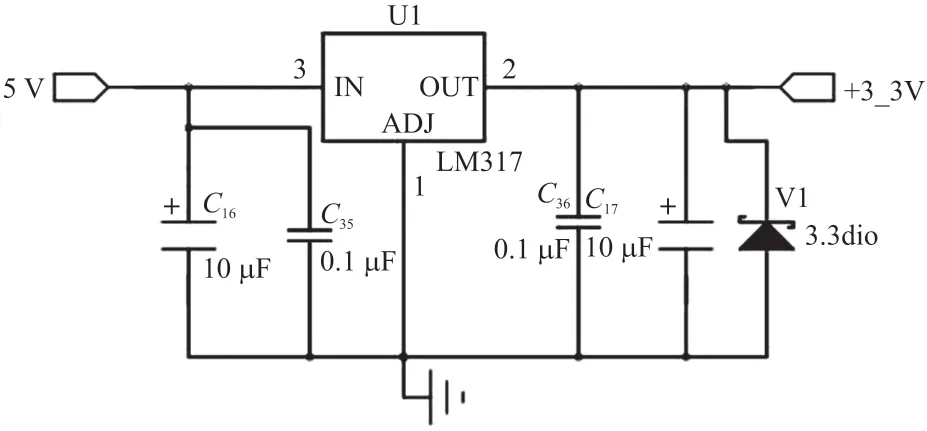
图5 3.3 V 电源设计电路图
2.2 传感器电路
2.2.1 压电式雨量传感器
雨量传感器采用压电转换原理设计,当雨滴落到受力表面上时,压电传感器会产生压力,在力的作用下,沿着表面形成与该力成比例的电荷信号,通过采集的电压信号大小来计算传感器的受力大小,然后计算出雨滴撞击时具有的动量大小,就可以计算出当前雨量,降雨强度等参数。
雨量传感器包括钢盖、压电传感器、电荷放大器。电荷放大器电路包括电荷-电压信号转换电路、归一化电路、低通滤波电路。电荷-电压信号转换电路由第一运算放大器和电阻、电容并联的反馈网络组成,电容负反馈对于直流工作点相当于开环,零漂很大,所以在电容两端并联反馈电阻,形成直流负反馈,减小零漂。
归一化电路由第二运算放大器和放大器反相端与输出端连接的可变电阻器组成,调节可变电阻可使不同压电传感器输出的电压大小相同。电荷转换电路中放大倍数的增大,不仅放大有用信号,也放大干扰信号,原始信号经过传输、放大和变换后,会混入各种形式的噪声,影响测量精度,低通滤波电路可补偿压电传感器引起的高频幅频特性,该电路由两个电阻、两个电容构成两阶RC 网络和第三运算放大器组成。经过电荷放大器把电荷信号处理后形成的模拟电压信号转换为数字信号,设计流程如图6所示。

图6 电路设计流程
滤波处理后的模拟信号经过AD 模数转换进行数字采集,与处理器STM32 进行数据交互。第一运算放大器、第二运算放大器和第三运算放大器由一片TL082 芯片运算放大器构成。这种测量方法比翻斗式、虹吸式等方法具有更高的精度、小体积、测量自动化、免维护等优势。
2.2.2 温湿度传感器
本设计采用SHT75 数字温湿度传感器采集温度和湿度数据,传感器在极其精确的湿度腔室内校准,校准系数以编程方式存在OTP 存储器中,用于内部信号校准。两线串行接口和内部电压调整使外围系统集成变得快速和简单,从而使传感器在各种苛刻的应用中便捷集成,并确保最佳性能。SHT75引脚接线与SHT71 相同,如图7 所示。
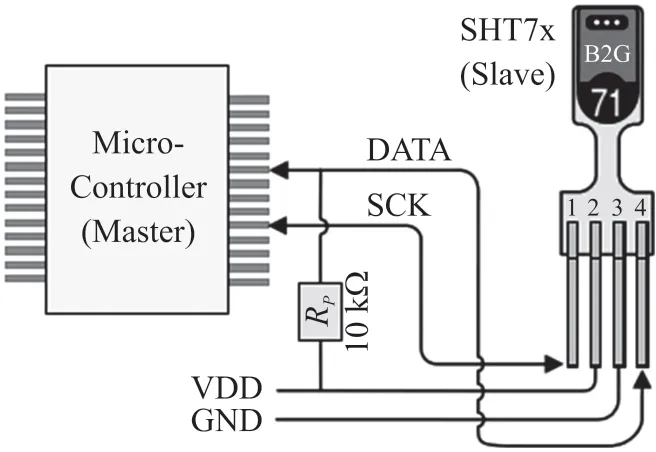
图7 SHT75 接线连接图
SHT75 与处理器的连接,是通过STM32 的两个I/O 口与传感器SHT75 的SCK 引脚和DATA 引脚相连,实现数据的交换。为避免信号冲突,微处理器驱动DATA 在低电平,所以DATA 引脚上加上一个10 kΩ 的上拉电阻接至3.3V 电压,将信号提拉至高电平,电源引脚(VDD、GND)之间加一个0.1 μF 的电容进行滤波。该传感器使用的2 线制通信,通信时序基本符合I2C 的通信时序,但与I2C 通信方式的通信协议不同。电路设计和PCB 布线如图8所示。
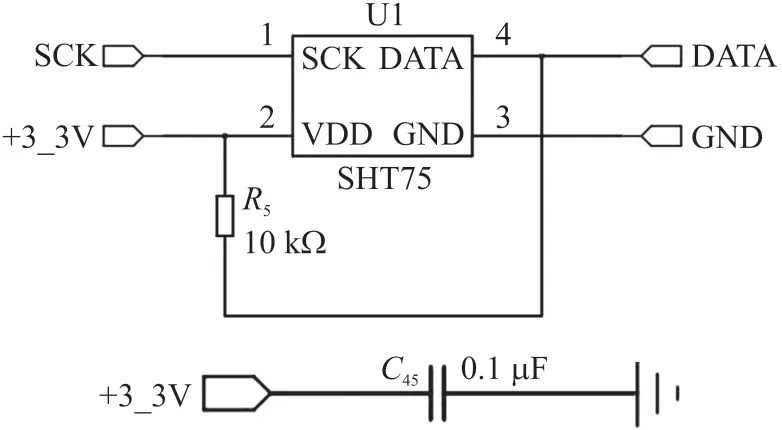
图8 SHT75 外围电路图
2.2.3 气压传感器
气压测量采MS5540C 传感器,首先把压力传感器输出的未补偿的模拟电压值转换成16 位数字值,包括气压测量值和温度测量值共两个16 位的数字值,通过接口电路把16 位数字值输出,然后处理器STM32 进行补偿计算,最终得出精确的结果。该传感器具有低电压,低功耗等特性,且带自动断电开关,具有极高的密封防护能力,可抵抗100 m 深水压,适合海上使用。
气压传感器MS5540C 供电电压为2.2 V~3.6 V,与微处理器STM32 采用SPI 方式通信,由于MS5540C 需要32.768 kHz 的时钟作为单独的时钟输入,而STM32 提供的时钟在宽范围温度下不能保证稳定,因此设计了32.768 kHz 的有源晶振SG3030为其提供输入源,电路设计如图9 所示。

图9 MS5540C 电路图
2.2.4 超声波风速风向传感器
超声波风速风向传感器采用微处理器STM32F103RCT6 和中心频率为200 kHz、探头间距为15 cm 的超声波换能器设计,控制器STM32 产生10 个200 kHz 的方波脉冲,经过Boost 升压电路,驱动超声波发射端发送信号。为了确保同一时刻只有一对超声波探头工作,STM32 定时器定时产生信号,循环驱动模拟开关控制换能器工作。波形发出后开启定时器计时,相应的接收端会接收到200 kHz的正弦波,对波形进行放大处理,通过滤波器滤除噪声和干扰,经过峰值检测模块得到检波信号,最后处理器测出时间,得出风速和风向值,硬件结构如图10 所示。
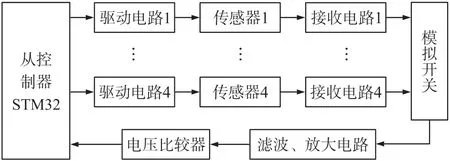
图10 硬件系统结构图
3 超声波风速风向测量算法
与传统机械式风速风向仪相比,超声波测量风速风向的优点非常明显,具有响应速度快、环境适应能力强和抗干扰能力强的特点,它避免了传统风速风向仪的机械磨损,延长了设备寿命和测量精度,降低了设备的维护成本,并且仪器具有很强的抗腐蚀性,满足海上气象探测的要求。
3.1 时差测量法
风速、风向采用超声波时差法测量,当超声波在空中传播时,逆风和顺风传播之间存在速度差,当传播距离一定时,速度差反映为时间差,其与测量的风速具有线性关系。对于接收和发射一体的超声波传感器,以一个特定的方向放置,并以固定频率发射超声波,通过测量超声波在两个方向上的到达时间,计算超声波在顺风和逆风下的传播速度,经过计算便可得到风速值,采用两组正交的探头分别测量两个相应的风速分量,合成后即可得到风速。如图11 所示。
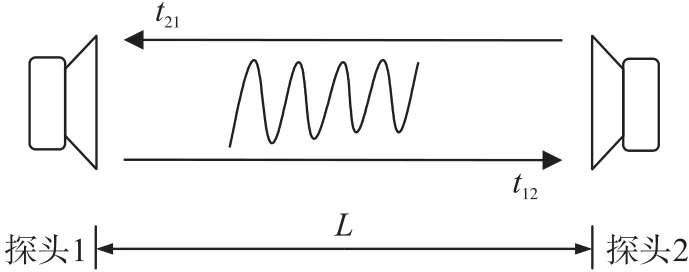
图11 超声波测量风速原理
当超声波传播方向与风向一致时,其传播速度会更快,反之亦然,会降低超声波的传播速度。如图11 所示,设超声波探头1 与探头2 之间的间距为L,顺风和逆风时超声波传播时间分别为t12和t21,风速为v,无风时超声波传播速度为c,则:
由式(1)和式(2)可以得到:
从式(3)可看出风速v与c无关,避免了环境因素对风速测量的影响。
风向采用垂直放置的方法进行测量,两对接收发送一体的超声波换能器彼此垂直放置,两者相对呈180°且每对超声波探头之间的距离相同,安装在同一水平面上,如图12 所示,设两对超声波探头距离均为L,X轴向的传输时间分别为t12和t21,Y轴向的传输时间分别为t34和t43,风速为v,X轴向的风速为vx,Y轴向的风速为vy,超声波传播速度为c。根据式(3)可得:

图12 垂直放置方法检测原理
X轴方向的风速:
Y轴方向的风速:
风速:
将X轴正方向设置为0°,按逆时针方向角度增加,则风向:
化简,求反函数:
随着风向的变化,某时刻的风向为:
3.2 真风计算方法
舰船在行驶中,方向和位置会不断改变,这对风速风向的测量产生影响。因此,在舰船航行气象测量时,方向和位置的改变需要电子罗盘和GPS 传感器对测量的风速风向数据进行修正,得出真风数据,计算过程如图13 所示。

图13 真风计算过程
超声波风速风向传感器测量风向值及风速值,电子罗盘测量舰船行使方向与正北方向的夹角,通过计算得出真实风向。GPS 测量舰船的航行速度,由于风速为矢量,对舰船速度和超声波传感器测得风速进行分解及叠加,通过计算可以得出真实的风速。
4 系统软件设计
系统软件设计包括应用程序设计和上位机软件设计,应用程序设计主要包括气象六要素传感器的程序设计,实现传感器对气象六要素的数据采集,并将采集的数据上传到上位机软件进行数据显示及存储。上位机软件主要功能包括显示和保存气象六要素数据,有效地实现自动气象站的数据实时显示及存储。
4.1 自动气象站数据应用程序设计
自动气象站系统实现对温度、湿度、气压、雨量、风速、风向气象六要素的数据采集、处理、通信和显示。应用程序主要实现传感器采集的数据通过相应的通信方式上传到微处理器进行数据处理,再将处理后的数据通过RS232 或RS485 发送到上位机软件进行显示和存储的功能。程序设计流程如图14 所示。
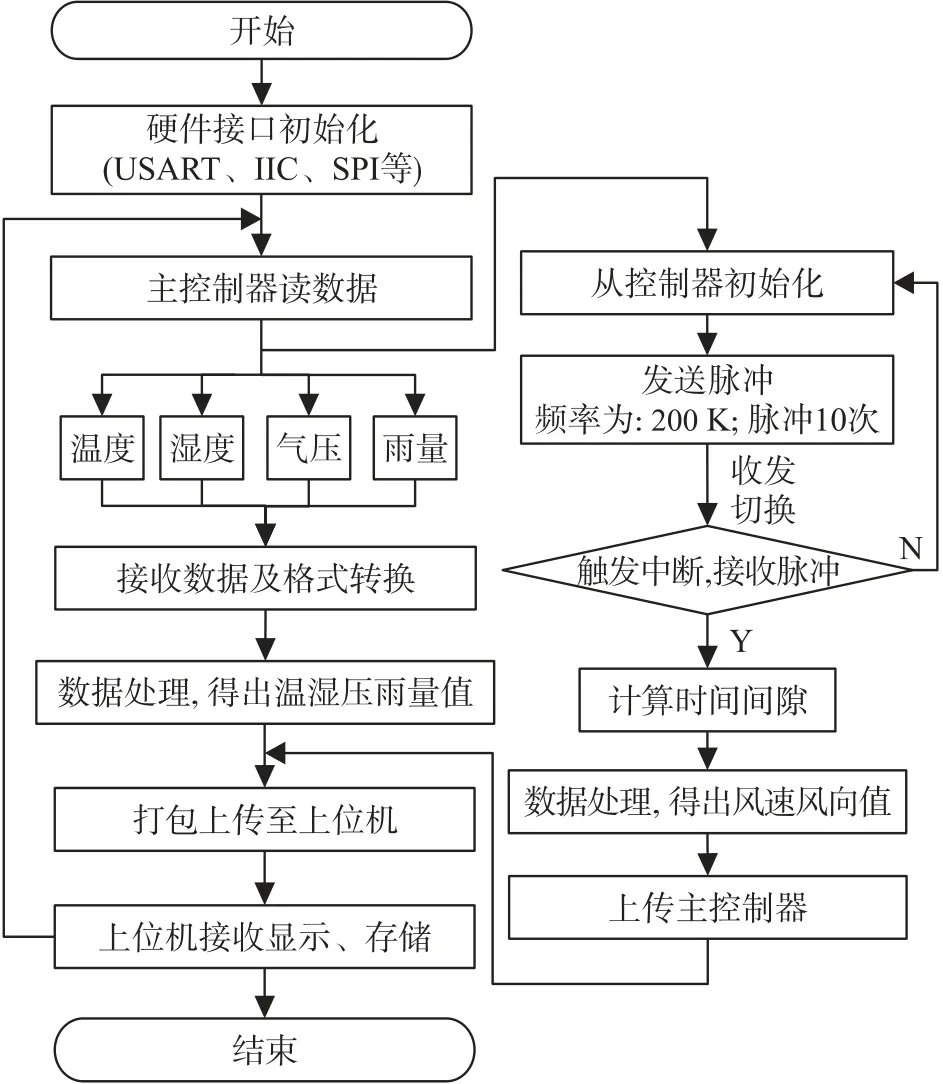
图14 程序设计流程图
首先主控制器进行自检,喂看门狗,然后进入主函数完成各个模块的初始化设置;初始化完成后,进入主循环,开始启动各个模块的采集程序,此时通过I/O 口发送一个下降沿到控制超声波传感器的从控制器,超声波传感器启动;温湿压模块以及雨量模块开始采集气象数据并上传相应的采集值,如果采集值有误则程序跳转到主循环开始,重新采集,采集完成后进入等待,等待超声波数据上传,超声波数据全部上传完成,所有数据统一进行打包,通过串口通信发送给到上位机软件。
4.2 上位机软件设计
该上位机系统的主要功能是接收自动气象站下位机采集的六要素气象数据,将数据实时显示并保存,供用户查询和监测。上位机包括登录界面和数据显示界面,用户通过登录界面进入系统,数据接收显示界面包括通信端口的初始化、仪器名称的选择、数据实时显示、数据保存等模块。
上位机通过无线数传模块与气象要素探测系统通信,方便气象要素的数据传输。界面内容包括串口参数设置、实时数据显示、时间信息、历史数据查询及各功能按键,实现对气象要素数据的接收及显示等功能。数据在界面上实时显示,在传感器数据接口实时显示当前的数据信息,并通过曲线进行数据分析,超过设定值预警指示灯提醒。数据采集界面如图15 所示。

图15 上位机界面
5 系统测试与分析
本文设计将压电陶瓷传感器安装在钢盖中央,依次安装雨量传感器和超声波传感器四个探头,传感器安装如图16 所示。
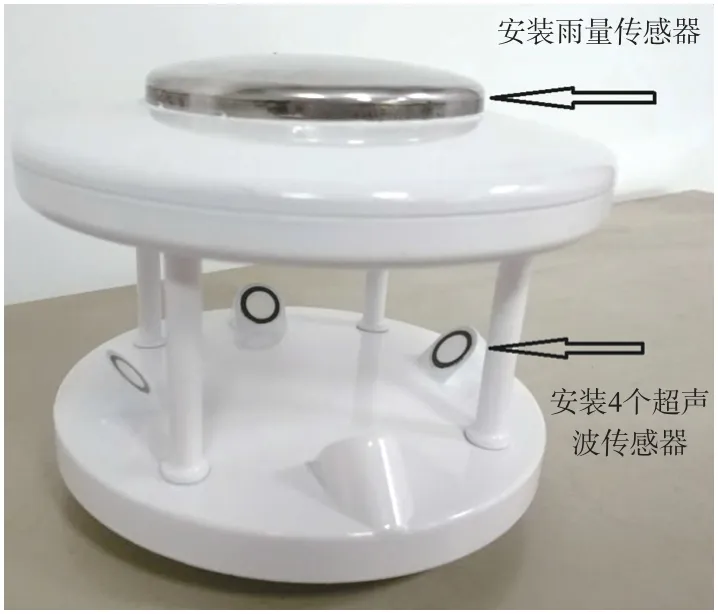
图16 传感器安装示意图
雨量传感器安装在最上面,超声波传感器在雨量传感器的下面,温湿压传感器在超声波传感器下面的百叶内,外壳组装时,上下壳之间加一层防水圈,防止海水进入设备内部对设备带来的影响。最后固定百叶片。整机安装如图17 所示。

图17 整机安装实物图
5.1 测试结果分析
经过测试,数据传输无异常,显示正常无乱码,间隔为1 次/10 s;读温湿度值正常,敲击钢盖有雨量值显示,显示值与敲击次数同比例上升,读取气压值正常,风速风向值显示正常,扰动后显示值改变。
其中,以地址为“01”为例,发送16 进制命令“21 3F 0D 0A”,返回值格式为16 进制“01 0D 0A”,再发送16 进制命令“21 01 52 30 0D 0A”,返回值格式为字符串“R0,S =0.6,D =192.8,P =1 008.2,T =23.6,H=79.4,R=33.7”,以TXT 文件保存的数据如图18 所示。
图18 采集数据返回值
5.2 数据对比分析试验
为了确保自动气象站在海上长期工作的稳定性,按照气象观测规范的要求,通过试验样机与其他气象站进行对比测试。
试验设备包括一套自动气象站样机、一套维萨拉自动气象站、一套长望自动气象站、一台电脑、三套数据采集软件和一个220 V 转12 V 开关电源,电源给测试的三套自动气象站供电。
试验天数为30 d,每天检查开关电源的供电、观看设备的运行状态,对比数值的变化。由于测试时间比较长,保存的测试数据较多,本文针对试验样机、维萨拉自动气象站和长望气象站所测的六要素数据,从中选取13 天所测的数据,算出这13 天的日平均数据进行对比,绘制的各个要素对比测试曲线如图19 所示。
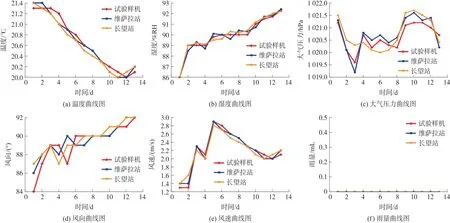
图19 各个要素对比测试曲线图
通过为期一个月的试验数据对比,设计的自动气象站与其他两套自动气象站所测量的数据进行了对比,结论如下:
根据图19(a)温度曲线图,可以看出,试验样机、维萨拉自动气象站和长望气象站三个气象站温度采集器在同一时刻所测的温度值比较接近,试验样机和对比站相比,测量误差均在±0.3 ℃以内。
根据图19(b)湿度曲线图,可以看出,三个气象站的湿度采集器在同一时刻所测的湿度值比较接近,试验样机和对比站相比,测量误差均在±3%RH以内。
根据图19(c)大气压力曲线图,可以看出,三个气象站在同一时刻采集的大气压力值比较接近,试验样机和对比站相比,测量误差均在±0.5 mbar 以内。
根据图19(d)风向曲线图,可以看出,三个气象站在同一时刻采集的风向值比较接近,试验样机和对比站相比,测量误差均在±3°以内。
根据图19(e)风速曲线图,可以看出,三个气象站在同一时刻采集的风速值比较接近,试验样机和对比站相比,测量误差均在±0.3 m/s 以内。
根据图19(f)雨量曲线图,可以看出,三个气象站在同一时刻采集的雨量值比较接近。试验样机和对比站相比,测量误差均在±4%以内。
通过每天检查开关电源的供电和观看设备的运行状态,发现本设计的自动气象站长期工作稳定性相对较好,对比测试数据可以看出,试验样机所测的六要素数据准确性较高,数据偏差均在合格范围之内,测量结果也基本符合应用需求,因此本设计的自动气象站稳定性和准确性都较好。
6 结语
针对海上复杂环境下气象探测的需求,特别是对海上风速、风向测量,本文介绍了一款一体式、微型化舰载自动站系统,集温度、湿度、大气压力、风向、风速、雨量六种气象参数测量功能于一体,实现对六要素数据的采集、显示和存储,并通过上位机显示。系统中的风速风向传感器采用超声波原理自主设计测量风速风向数据,在海上恶劣环境下能够正常工作,与传统机械式风速风向仪相比,具有磨损小、寿命长、响应快、抗干扰强等优点。本气象站采用一体化设计,可降低机械复杂度,提高传感器的抗风能力,具有较强的稳定性和可靠性,适用于海上环境的长期在线监测。