DDPG方法在抖振约束下变弯度翼型/机翼设计的应 用 研 究
2024-01-29周思历
周思历, 孙 刚, 王 聪
(复旦大学 航空航天系, 上海 200433)
0 引 言
降低巡航阻力、提高巡航升阻比一直以来都是民用客机设计的重要指标[1].传统翼型常以50%燃油载荷对应的升力系数为设计点进行设计[2-3].但在其他燃油载荷下,翼型的升阻性能往往会下降明显.相比于继续优化设计点获得更好的50%燃油载荷附近的巡航性能,同步优化其他燃油载荷下的非设计点无疑更能提升整段巡航的平均升阻性能,进而提升巡航的质量和经济性[1].
变弯度技术是近年来发展较快的一种减阻方式.通过后缘襟翼的偏转实现翼型弯度的改变,在不同升力系数工况下获得更低的巡航阻力[4].如Kaul等[3]研究了5种不同的变弯度构型与基础翼型在-3°到10°迎角范围下的升阻性能差异,其中4种构型都表现出了优于基础翼型的性能.郭同彪等[5]以设计点单点优化了两种跨声速翼型,再结合变弯度技术改善了非设计点的升阻性能.而变弯度技术还可与基础翼型的优化耦合,在基础翼型设计阶段纳入变弯度技术,通过基础翼型的外形优化和弯度搭配,同步提升了多升力系数工况的升阻性能.Niu等[4]以基础翼型不同弯度下的最大升阻比作为评价指标来优化翼型基础外形,设计出各工况下通过弯度变化均可获得较大升阻比的变弯度翼型.
而在民用客机设计中,比经济性要求更严格的是安全性.超临界翼型设计的一个重要方面就是翼型的抖振特性.随着飞行Mach数和迎角的增长,翼型上表面会产生激波诱导分离区域,激波与分离区相互作用,导致大范围的激波自持振荡,造成阻力激增与升力损失,甚至对翼面结构造成影响和破坏,严重时还会引发飞机安全事故[6-7].故在飞机设计阶段就必须纳入抖振特性的考虑,飞机巡航升阻性能的提升不能以抖振特性的减弱为代价.民用客机巡航也要求留有1.3g的抖振裕度,即在1.3g过载下仍具备正常飞行能力,不出现上述抖振现象[8].
但精确抖振模拟的计算代价太大,直接代入优化流程会导致难以接受的计算成本[9].故寻常优化设计中常以气动参数曲线线性段偏移等方法[10-11]对抖振始发边界进行判断,但这也需计算出完整的气动参数随迎角变化的曲线,成倍增加优化流程的计算量.故本文参考文献[8],发展了一种描述翼型上表面流动分离的光滑连续函数,基于抖振与流动分离的伴随关系,通过对分离函数的限制,实现了抖振性能的约束.
而抖振约束下的变弯度翼型多升力系数工况优化较为复杂,寻常基于梯度的优化算法难以适用.而随机方法如粒子群(PSO)、遗传等群智能算法在设计空间内“撒点式”的寻优虽然常能找到合适的设计结果,但基于概率来选择进化方向又导致了计算代价大、收敛速度慢、可能陷入局部最优等缺点,在设计场景复杂、需要反复迭代的变弯度翼型优化中,并不是合适的选择.深度强化学习是近年来兴起的热点,在图像处理[12-13]、自动驾驶[14-15]等领域已经取得了较多研究成果,在翼型气动优化设计方面也有了一定的研究基础[16-17].不同于群智能算法“撒点式”逐渐收缩至最优值附近的方式,深度强化学习是一类基于策略学习的机器算法,它通过与环境的不断交互积累经验,从经验中逐渐学会回报最高的策略.而深度确定性策略梯度(DDPG)方法作为深度强化学习的经典算法,具有以神经网络精确近似值函数、以经验缓冲离散样本相关性、以目标网络与现实网络相结合提升训练稳定性等特点,在高维连续动作任务中表现出了良好的性能,在气动设计领域得到了一定程度的应用.如Yan等[18]以升阻力系数为目标提出了一种基于DDPG的导弹气动外形优化方法,成功地设计出性能良好的导弹外形.Qin等[19]以总压损失系数、吸力面相对层流面积等构建DDPG回报函数,实现了对压气机叶栅叶型的迭代修型,设计出降低3.59%总压损失系数、提高25.4%吸力面相对层流面积的良好叶栅叶型.
本文将DDPG方法应用于抖振约束下的变弯度翼型设计.首先,基于CFD数值计算样本库搭建了人工神经网络(ANN)代理模型,再结合变弯度技术构建变弯度翼型优化模型,添加几何外形约束和分离函数约束,并以DDPG方法对此模型进行修型优化,利用模型给出的气动参数反馈,学习修型经验,完善修型策略,实现了翼型优化设计.然后,与PSO和改进灰狼(GWO)两种群智能算法对此模型的优化结果进行比较,验证了本文DDPG方法的良好性能.最后,以此变弯度模型和DDPG方法实现了某机翼截面翼型的变弯度优化,并生成锥形后掠翼验证翼型变弯度优化对三维机翼的贡献.本文主要内容如下:第1节介绍了设计流程中的多种方法,包括变弯度技术、分离函数方法、DDPG方法;第2节介绍了具体设计过程,包括优化模型、优化过程、结果分析;第3节对本文工作进行了总结.
1 设 计 方 法
1.1 框架总述
针对巡航阶段翼型调整后缘偏转角度来改变弯度进而改变巡航升阻比的特点,本文搭建了基于DDPG方法的变弯度翼型设计框架,实现了翼型几何外形设计和不同升力系数工况下的弯度选择,并与两种群智能算法的设计结果进行比较.
本文选择类函数/形函数变换(CST)作为翼型几何外形参数化方法,通过Latin超立方扰动生成设计空间内的几何外形样本库,加上弯度和迎角形成代理模型的输入,通过CFD计算得到对应性能参数作为输出,训练ANN得到(几何参数+弯度+迎角)-性能参数的代理模型,进而建立变弯度翼型优化模型,实现输入翼型CST参数,输出不同弯度下的最大升阻比曲线和其平均值.再搭建DDPG算法框架与此模型交互,学习翼型修型策略,并与群智能算法对此模型的优化结果进行比较,验证了DDPG方法的良好性能.
基于DDPG方法和群智能算法的变弯度翼型优化设计框架如图1所示.框架由三个模块组成:群智能算法种群池、变弯度翼型优化模型、DDPG智能体.其中优化模型作为适应度函数对群智能算法种群池个体的评价可以实现群智能算法的种群寻优;优化模型作为环境供智能体交互学习,可以实现DDPG方法修型策略的完善.群智能算法以翼型CST参数作为个体,以优化模型计算个体适应度值,实现种群寻优与更新,循环迭代得到适应度值最优的个体.DDPG算法智能体接收CST参数作为状态,输出CST参数变化量作为动作,通过环境的反馈学习修型策略,实现最优翼型设计.最后经CFD验证,比较DDPG方法与群智能算法的设计结果,验证DDPG方法在翼型气动设计领域的良好性能,同时得到最优翼型设计结果.
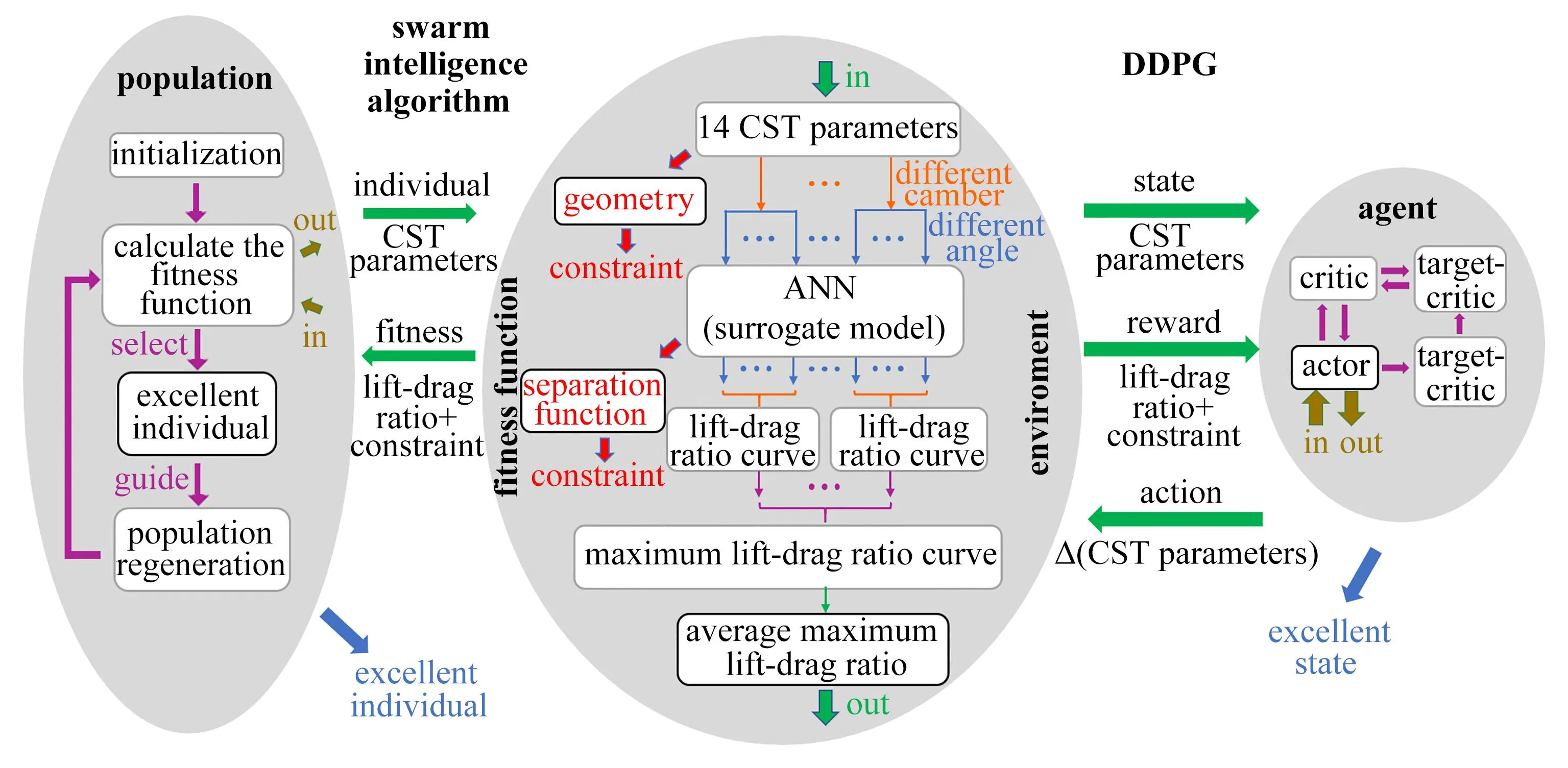
图1 变弯度翼型优化设计框架
1.2 变弯度技术
NASA于2010年提出后缘连续可变弯度襟翼(VCCTEF)概念[20-21],文献[3,20,22]对二维多段式襟翼截面不同偏转方式进行了详细数值研究,研究表明圆形变形的三段式襟翼在多升力系数点下具有优良的升阻性能.圆形变形方式指三段襟翼依次偏转相同角度,如VCCTEF222表示三段襟翼依次偏转2°,2°,2°.考虑到未来材料的发展,后缘连续偏转的襟翼还被设定为襟翼各段间柔性材料连接,偏转无缝隙、凸起等.故设定超临界翼型变弯度方式为:以弦长70%~<80%,80%~<90%,90%以后为三段襟翼,每段襟翼绕该段前端厚度中点旋转,旋转后的襟翼与翼型其余部分光滑连接,三段襟翼整体以圆形变形方式偏转.
若直接以三个变量分别控制三段襟翼的偏转角度,则一方面对应于优化中额外添加了三个变量,增加了优化难度;另一方面优化所需数据库的样本规模将依托于这三个变量的划分密度成百倍增长,如每个变量离散为6个值,计算量就是6×6×6的倍数增长,是设计中难以接受的.而一个变量控制的圆形变形方式,则显著降低了需求样本的数量,即在基础翼型计算量上仅仅扩大6倍,是可以接受的计算成本.此外,圆形变形方式还能带来更好的升阻性能提升,并有效避免了文献[3,20,22]中存在的如S形等低效的变形方式.故本文以圆形变形方式来实现变弯度的设计.
同一超临界翼型在不同后缘弯度下具有不同的升阻性能,如图2所示,通过在不同升力系数工况下改变后缘襟翼偏转角度可以获得各工况下最大的巡航升阻比,进而获得巡航最大升阻比曲线,以此优化翼型基础外形,实现设计点与非设计点性能的多重提升.

图2 超临界翼型不同后缘偏转角度的升阻比曲线
1.3 分离函数方法
在抖振边界附近,随着飞行Mach数、迎角(或升力系数)的增大,机翼上表面流动分离区连续迅速增大,升力损失增加[8].而流动分离区增加到一定大小时,其造成的升力损失接近于Mach数增加或迎角增加带来的升力增长,升力系数曲线的增长就变得平缓了,抖振就伴随发生了.于是可用上表面流动分离区的大小作为二维翼型抖振发生的判据,如下式所示:
(1)
(2)
式中,V为实际流动速度,V∞为自由来流速度,Lref为上翼面参考面积(长度),k为锐度常数,dL为上翼面流场近壁面基本单元.在本文设计中,分离区大小即分离函数值Ssep=0.04时对应为抖振边界,与文献[8]一致.下文将与Δα=0.1方法[10]比较,验证本文分离函数方法的可靠性.
Δα=0.1方法将翼型气动参数(常为升力系数)曲线线性段所在直线沿迎角α增大方向线性偏移0.1后,与原曲线的交点作为抖振边界.如图3所示,为RAE2822翼型采用Δα=0.1方法在不同Mach数下对于抖振边界的判定结果,为了不同Mach数下升力系数曲线的可视化,将升力系数曲线按Mach数不同在α方向上进行了一定程度的偏移.图4为分离函数方法判定的结果,图5为两种方法判断的差距.Δα=0.1方法在较大Mach数时判定结果会偏小,与文献[8]中的情形是一致的.故本文发展的分离函数方法是可靠的.
1.4 DDPG方法
DDPG是典型的深度强化学习方法[23],能够解决高维连续动作空间的策略学习问题.本文将其改善并应用于变弯度翼型设计,算法框架如图6所示,算法流程如算法1所示.
DDPG智能体由两层actor-critic网络构成,分别是actor(网络参数为θμ)、critic(θQ)和target-actor(θμ′)、target-critic(θQ′),actor类网格根据所处状态给出动作,critic类网格根据状态-动作对给出价值估计.算法收集actor与环境互动的经验(st,at,rt,st+1)存入经验池R.经验池达到一定规模后,从中随机选取小批次M条经验数据,以target-actor基于下一状态st+1预测下一动作at+1,target-critic预测对应价值估计Q′,结合当前回报r和远期价值衰减系数γ形成critic当前的价值期望yi=ri+γQ′,通过梯度下降算法最小化critic当前价值估计Q与期望yi的差距更新critic网络参数θQ,如算法1第14步所示.再通过梯度上升算法最大化critic价值估计Q更新actor网络参数θμ,实现actor对于良好策略的学习,如算法1第15步所示.最后以actor、critic网络参数对target-actor、target-critic网络参数进行软更新,如算法1第16步所示,实现所有网络的训练.

图3 Δα=0.1方法在不同Mach数下的抖振边界判定
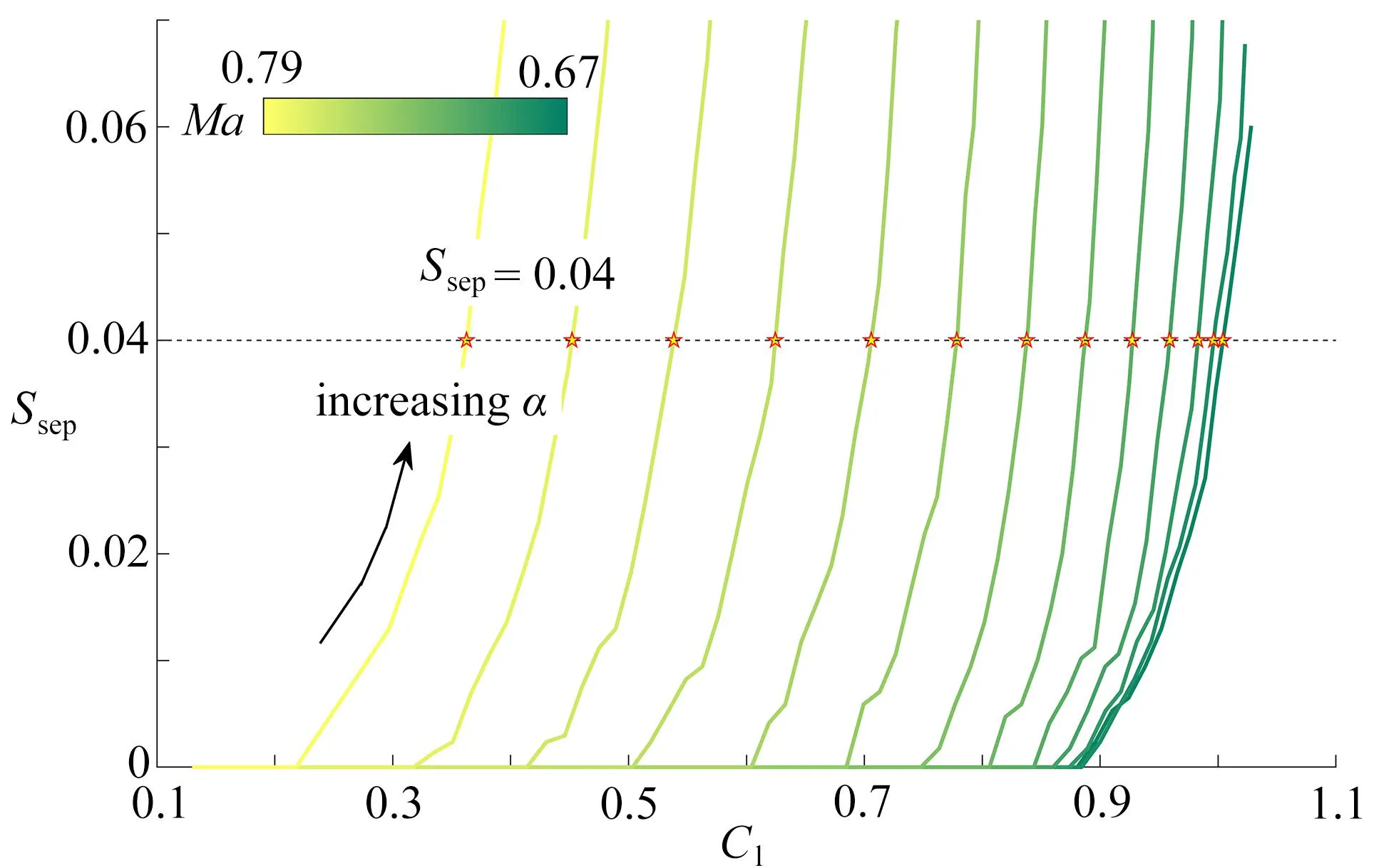
图4 分离函数方法在不同Mach数下的抖振边界判定
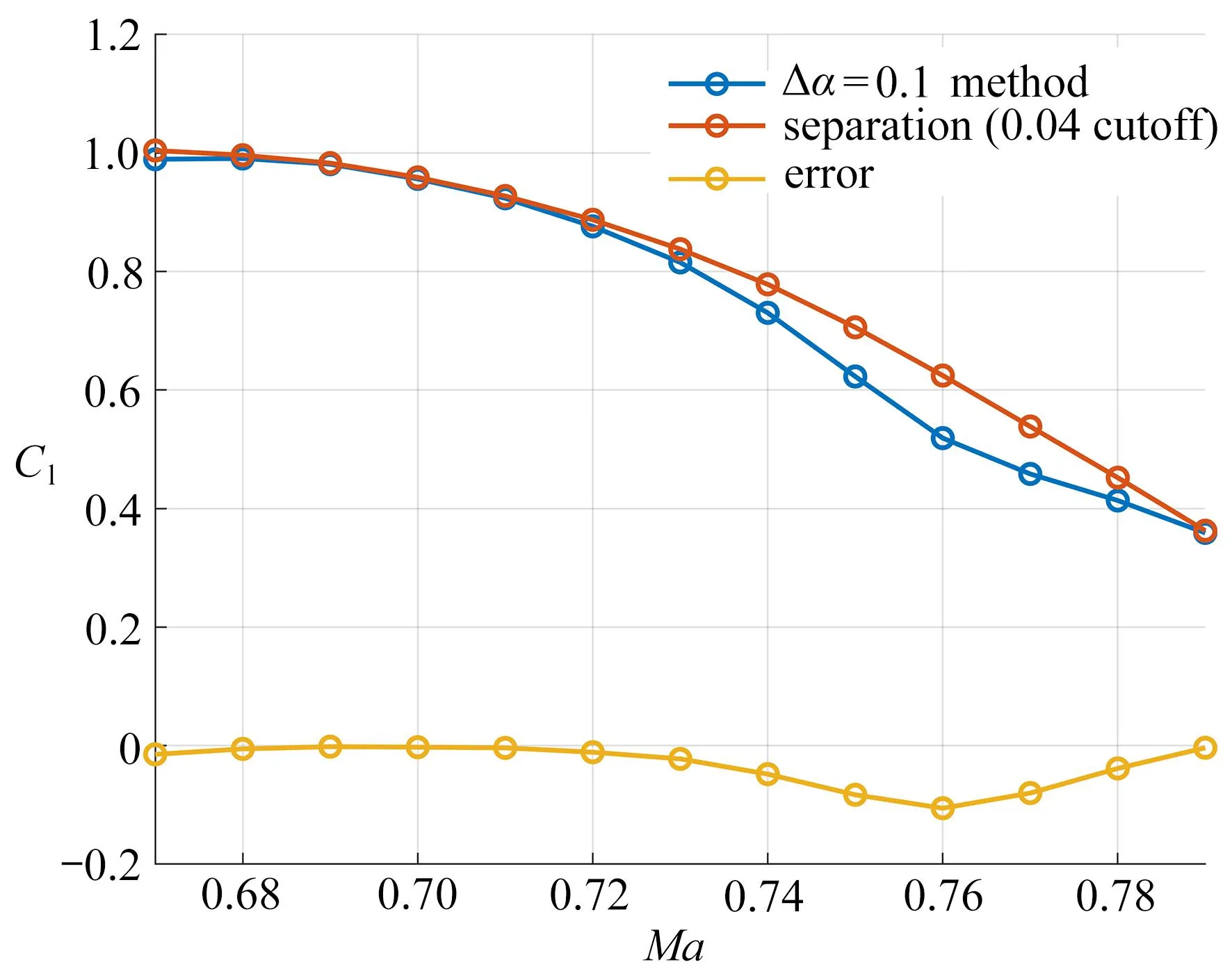
图5 Δα=0.1方法和分离函数方法的对比
DDPG算法中经验池的使用使得每批次训练样本来自不同策略,打破了原有样本间的相关性,提高了训练效率;同时离散的样本在训练中可重复使用,提高了数据利用率,减轻了对数据总量的要求.这也是后文DDPG算法效率远高于群智能算法的重要依据之一.但算法的确定性策略会带来探索能力的匮乏,故在训练阶段actor给出确定动作后,额外添加正态分布噪声~N(0,σ2),并通过衰减系数φ实现前期较大的噪声以及对应的广泛探索能力,和后期微小的噪声以及足够的收敛能力.
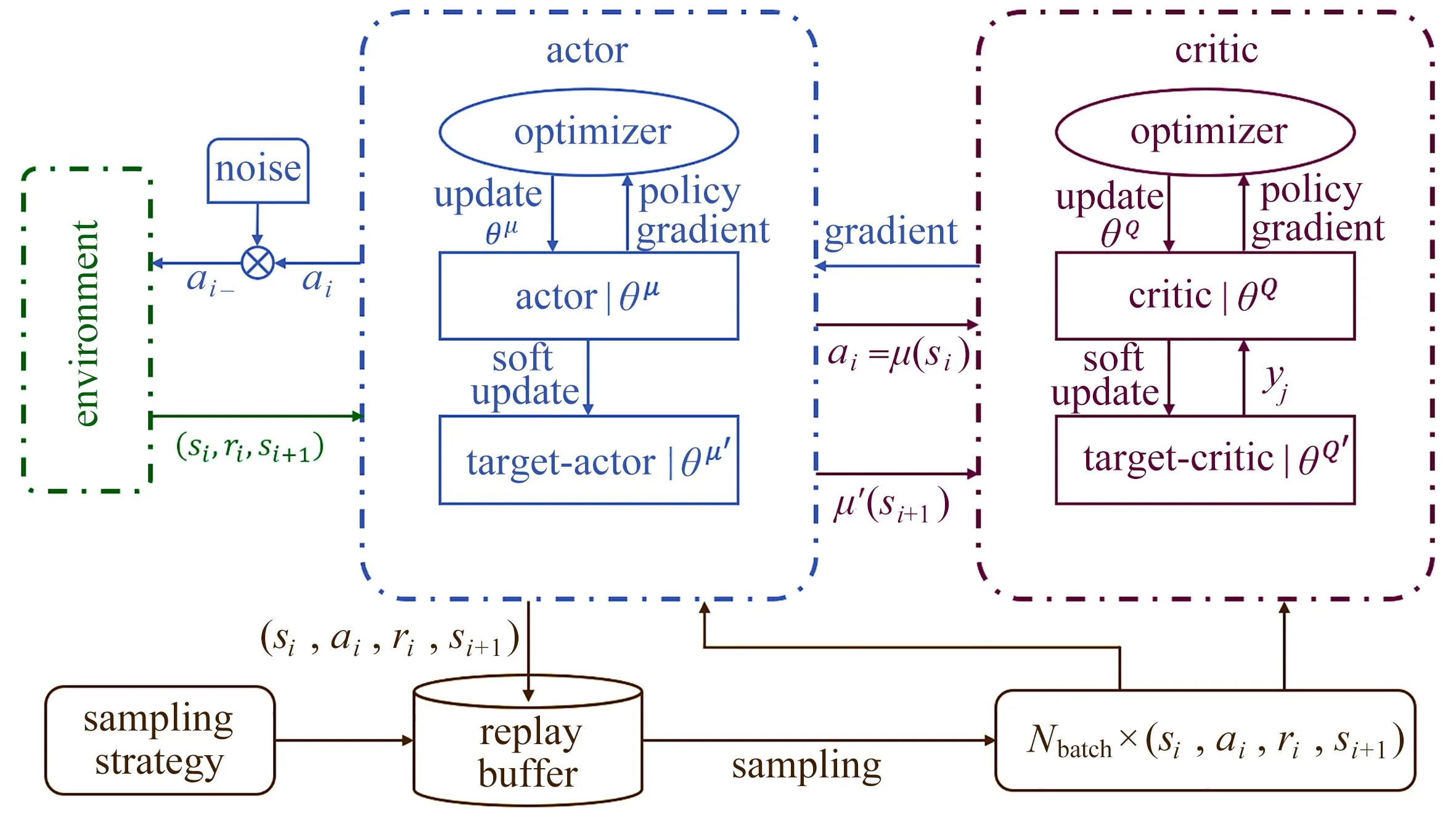
图6 DDPG算法框架
算法1 DDPG算法流程
1 randomly initialize networkQ(s,a|θQ) andμ(s|θμ)
2 initialize target networkθQ′←θQ,θμ′←θμ
3 initialize replay buffer R
4 initialize noise parameterσ,~N(0,σ2)
5 for episode=1, EPISODE do
6 noise attenuation:σ=σ×φ
7 receive initial states1
8 while not done do
9 select actionat=μ(st|θμ)+according to the current policy
10 executeatand observe rewardrt, next statest+1, terminating information
11 store transition (st,at,rt,st+1) in R
12 sample a random minibatch ofMtransitions from R
13 setyi=ri+γQ′(si+1,μ′(si+1|θμ′)|θQ′)

15 update the actor policy using the sample policy gradient:

16 update the target networks:
θQ′←τθQ+(1-τ)θQ′
θμ′←τθμ+(1-τ)θμ′
17 end for.
2 设 计 过 程
2.1 优化模型
第4届阻力预测会议(DPW)[24]给出跨音速运输机公共研究模型(CRM),大量学者基于其机翼和翼型结合变弯度技术开展了多项减阻研究[20,22]和抖振性能优化研究[8-9].在Kenway等[8]基于机翼外形优化对抖振和流动分离的研究中,上表面流动分离首先发生于机翼中段,并随迎角增加呈现向翼尖扩展的趋势.故本文选取机翼展向60%截面为初始翼型,融合变弯度技术改善其基础外形,在抖振性能不减的前提下,增强其巡航多升力系数点下的升阻性能.基于此,以CRM机翼和RAE2822翼型验证三维、二维网格和计算方法的正确性,以2.5D和2.75D方法将机翼三维设计工况转变为翼型二维设计工况.再发散得到二维非设计工况,来研究变弯度翼型的多升力系数工况优化.
CRM机翼设计工况为:巡航Mach数0.85、Reynolds数500万、升力系数0.5.三维网格收敛性验证如表1所示,网格数量与DPW总结文献[24-25]相近.中等网格压力云图如图7所示,不同截面压力分布如图8所示,参考值为文献[26]的计算结果,文献[27]也有类似结果.可以看出三维中等网格已基本收敛,可以用于后续研究.

表1 CRM机翼网格收敛性验证
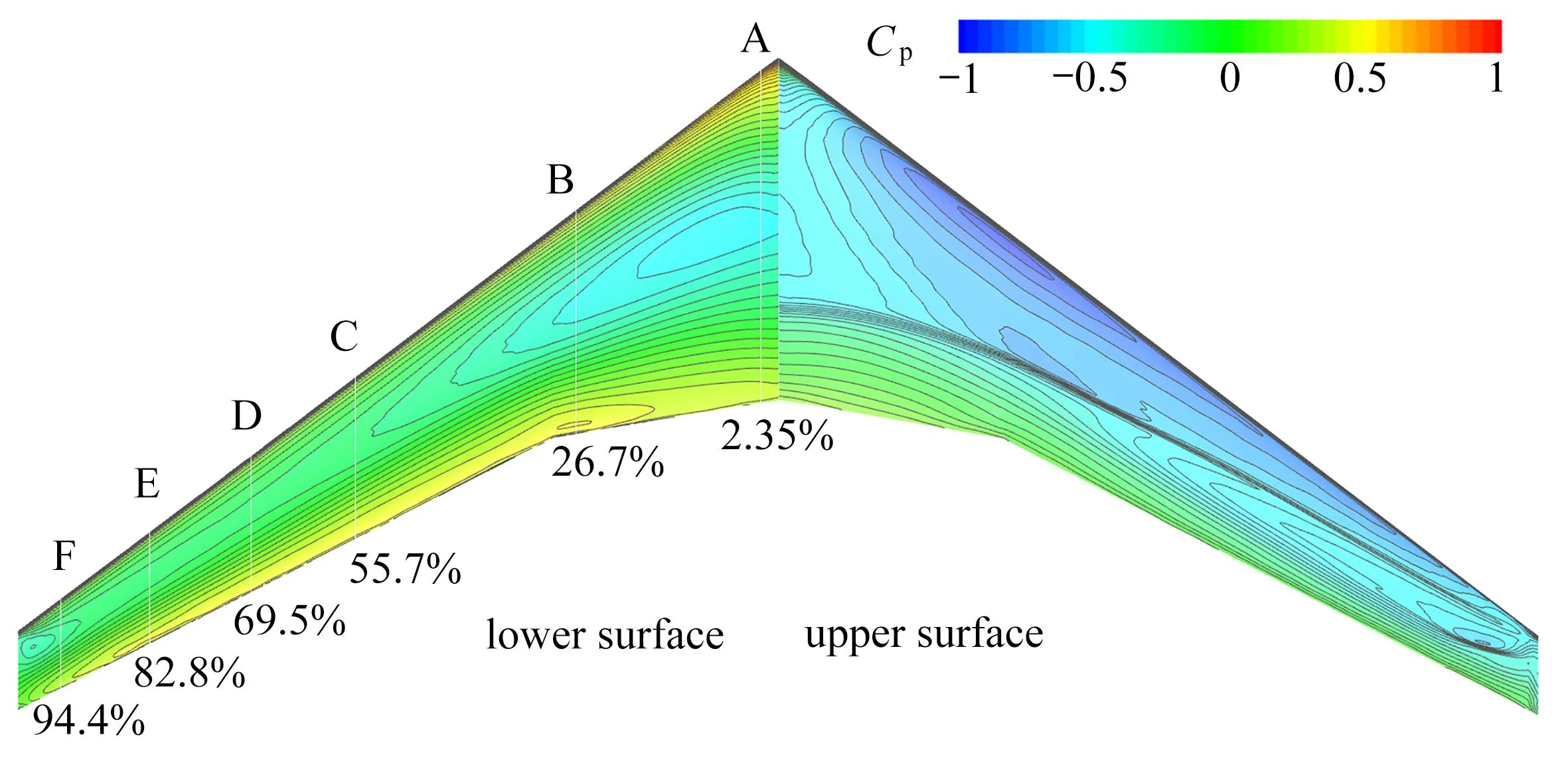
图7 机翼表面压力云图
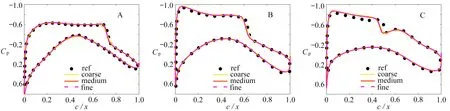
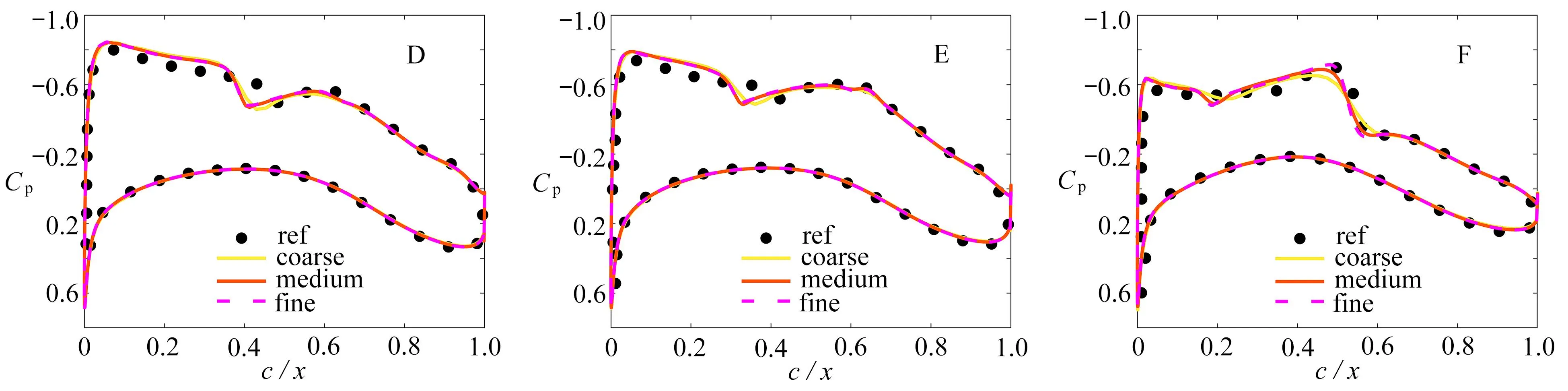
图8 不同网格精度下机翼截面压力分布
RAE2822翼型验证工况为:Mach数0.73,Reynolds数6.5×106,迎角3.19°(升力系数0.803),二维网格收敛性验证如图9所示,其中参考值ref来自AGARD的case 9[28].参考值的工况为:Ma=0.73,α=3.19°,Cl=0.803,Cd=0.016 8.虚曲线是Mach数修正为0.734[29],能更精确地对照ref的激波位置.可以看出二维中等网格已基本收敛,可以用于后续研究.
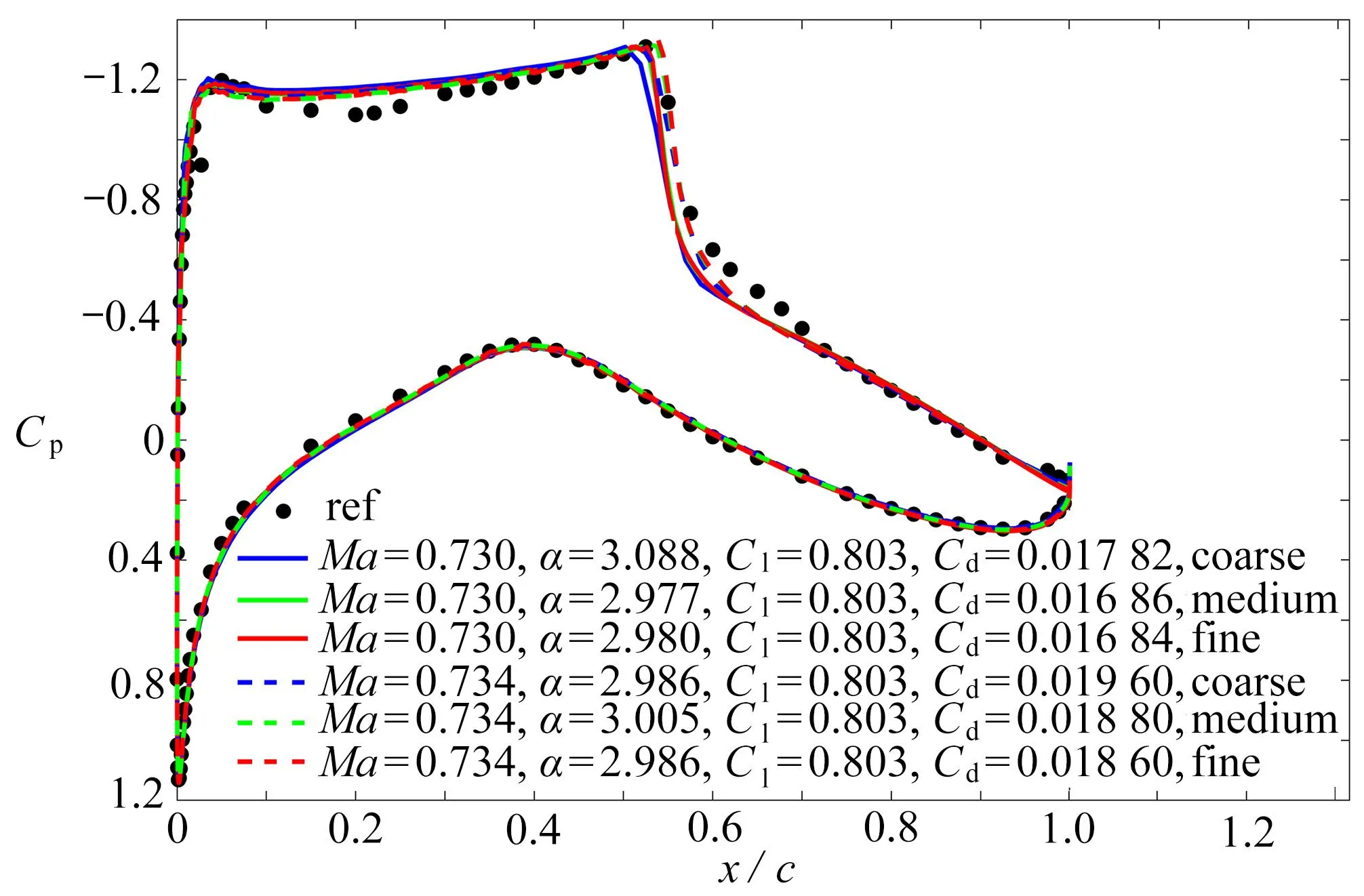
图9 RAE2822翼型网格收敛性验证
2.5D和2.75D方法是三维与二维流动差异的弥补,使得二维设计仍对三维设计有足够的贡献.2.5D方法称为经典后掠理论或余弦规则[30],适用于翼型与无限翼展后掠翼之间的参数转换,如式(3)—(6)所示:
C′p=Cp/cos2Λ,
(3)
C′l=Cl/cos2Λ,
(4)
C′d=Cd/cos2Λ,
(5)
M′∞=M∞·cosΛ,
(6)
等式左边为二维参数,右边为三维参数,Λ为1/4弦线后掠角.
而实际机翼还需考虑根尖效应的影响,在设计时额外对二维升力进行1.1~1.2倍放大[31],即
C′l=(1.1~1.2)Cl/cos2Λ.
(7)
但跨声速机翼/翼型上表面激波的出现,导致2.5D方法精度有了较大下降,基于激波位置附近1/2弦线后掠角的2.75D方法[32-33]就迅速发展而成,限于篇幅,不做介绍.而Streit等[34]也以1/2弦线后掠角改进了2.5D方法.本文分别以2.75D和改进2.5D方法将三维工况(Ma和Cl)转换为二维工况,计算截面翼型的压力分布,再转换回三维压力分布,与机翼实际三维计算结果对比,如图10所示.可见改进后的2.5D与3D计算结果基本一致,只是因为缺少激波后的机翼展向流动信息导致激波后压力分布有些差距.但2.75D方法不仅激波后表现不佳,在前缘上表面、尾缘上下表面更是与3D结果有着较大差距.故本文以改进2.5D方法进行后续设计,转换前后的设计工况如表2所示,机翼1/2弦线后掠角取29.88°.

表2 2.5D方法工况转换结果
基于巡航过程中燃油重量的不断变化,设定巡航为升力系数0.7至0.9,0.01为间隔的均匀工况.如图2所示,低于0.7时,各弯度下升阻比相近,变弯度设计意义不大;高于0.9时也对应于最大角度的变弯度.故设定工况为0.7至0.9,也使得0.8为工况中心.文献[35]介绍了具体根据巡航不同阶段重量变化的工况比例,本文参考文献[26],以多工况同等重要做方法研究.即设定优化目标为多工况下的平均最大升阻比最大,对应为图2中不同弯度下的最大升阻比曲线的平均值最大.而若以此曲线按不同权值加权平均,也可实现不同重量工况的重要程度分级.但对本文方法研究无影响,仅是设计结果侧重于不同重量工况阶段,故不深入考虑.翼型的后缘襟翼角度离散为[0°,1°,2°,3°,4°,5°],更大范围的角度变化在0.7至0.9的工况内无明显升阻性能提升,更密的襟翼角度分布也是使得最大升阻比曲线更加光滑,无突出性能提升.
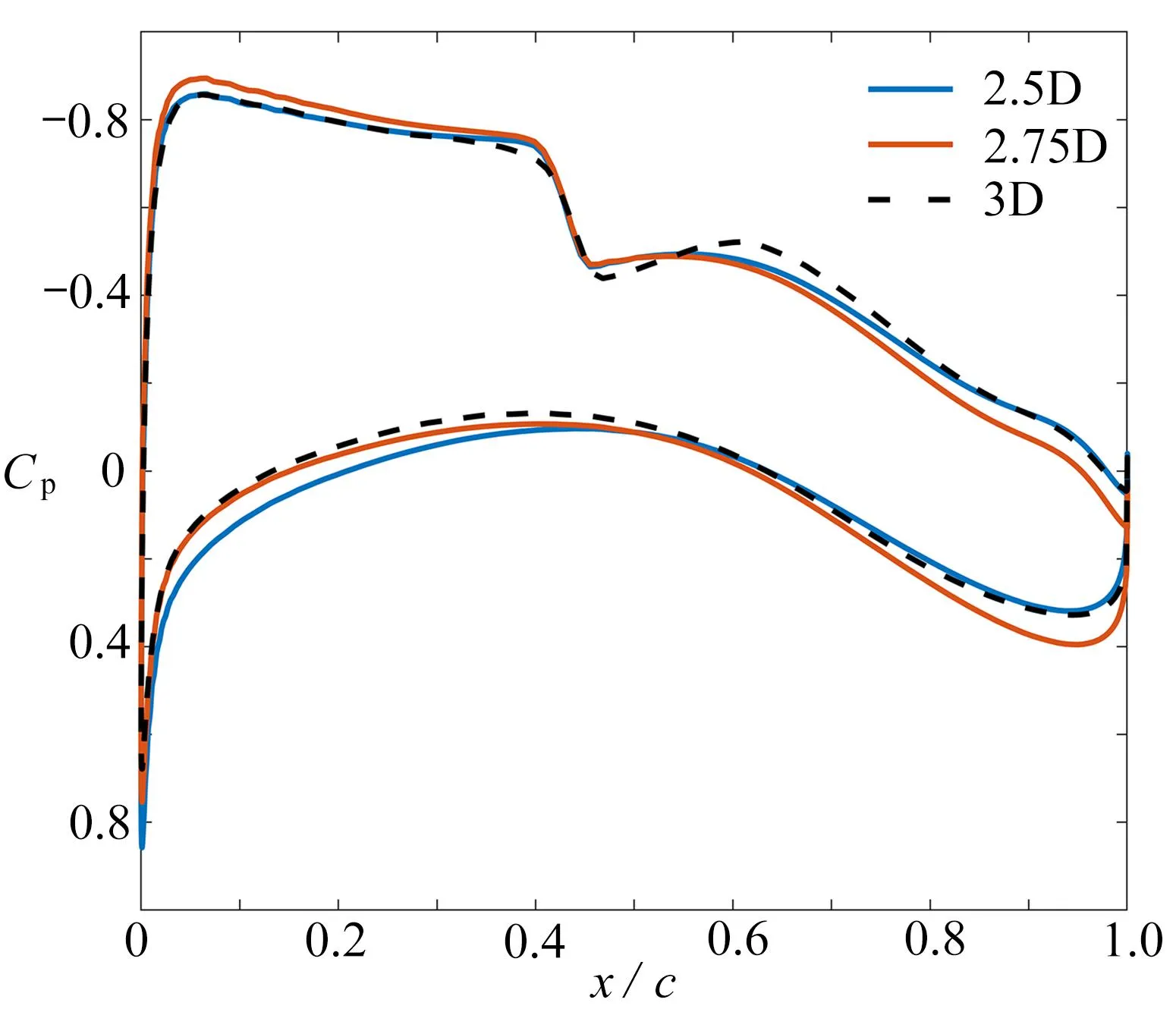
图10 2.5D、2.75D和3D计算的压力分布对比

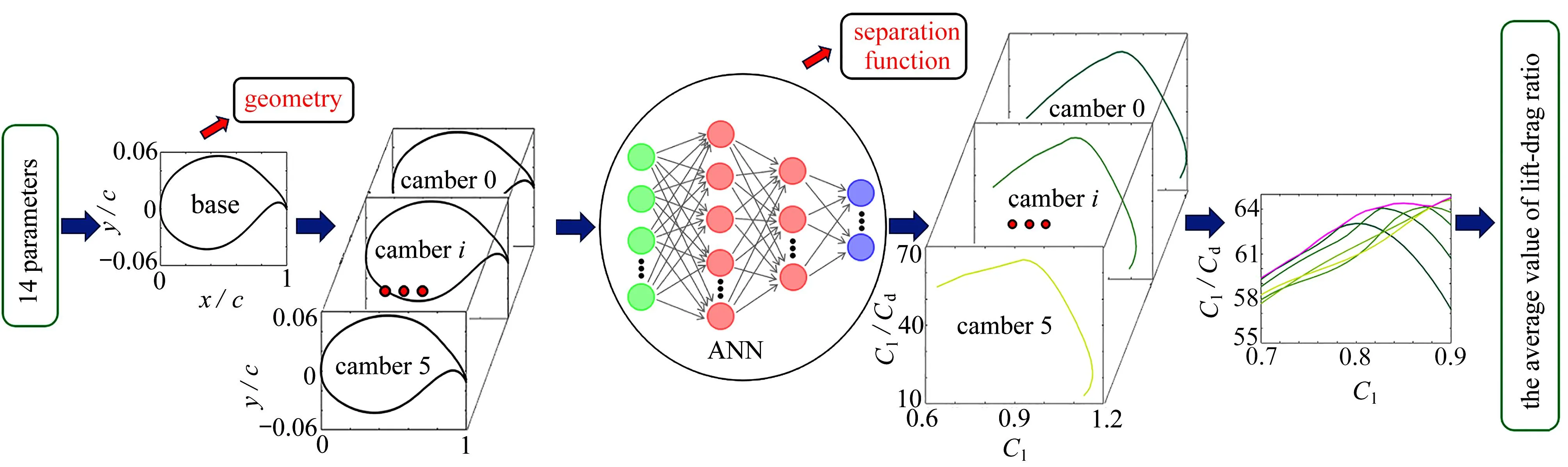
图11 优化模型
在优化模型中,额外添加翼型厚度约束,为前缘半径、最大厚度、尾缘厚度不小于初始的90%(不小于初始值为对照组);添加分离函数约束,为升力系数1.075以前分离函数值不大于0.04.分离函数值随升力系数增长而增长,1.075前分离函数值不大于0.04也就保证了分离函数值达到0.04时升力系数不小于1.075,即抖振边界不小于1.075.如图14所示,1.075为初始翼型抖振边界,约为设计升力系数0.798的1.35倍,图14为初始翼型不同弯度下两种方法得到的抖振边界.优化模型结合变弯度技术和分离函数方法,实现输入14个CST参数,输出平均最大升阻比和多重约束信息.
2.2 优化过程
基于上述优化模型,本文以翼型14维CST参数作为状态,14维参数变化量作为动作,设立DDPG方法,从翼型初始外形出发,学习回报最高的修型路线.其中回报函数如式(8)所示,r为奖励函数值,x为CST参数,f(x)为目标项,g(x)为约束项;f(x)具体如式(9)所示,g(x)在不同约束不满足时取不同的常数值:
r=f(x)-g(x),
(8)
f(x)=c1×ec2×(Cl(x)/Cd(x))-c3,
(9)
式中Cl(x)与Cd(x)为CST参数对应翼型的升阻力系数,c1,c2,c3为常数,在本文中取值为0.005,0.15,100,使得目标项f(x)在达到较优值附近时回报函数具有更大的梯度,进而使得较优值附近的微小进步也能够被智能体所学习.
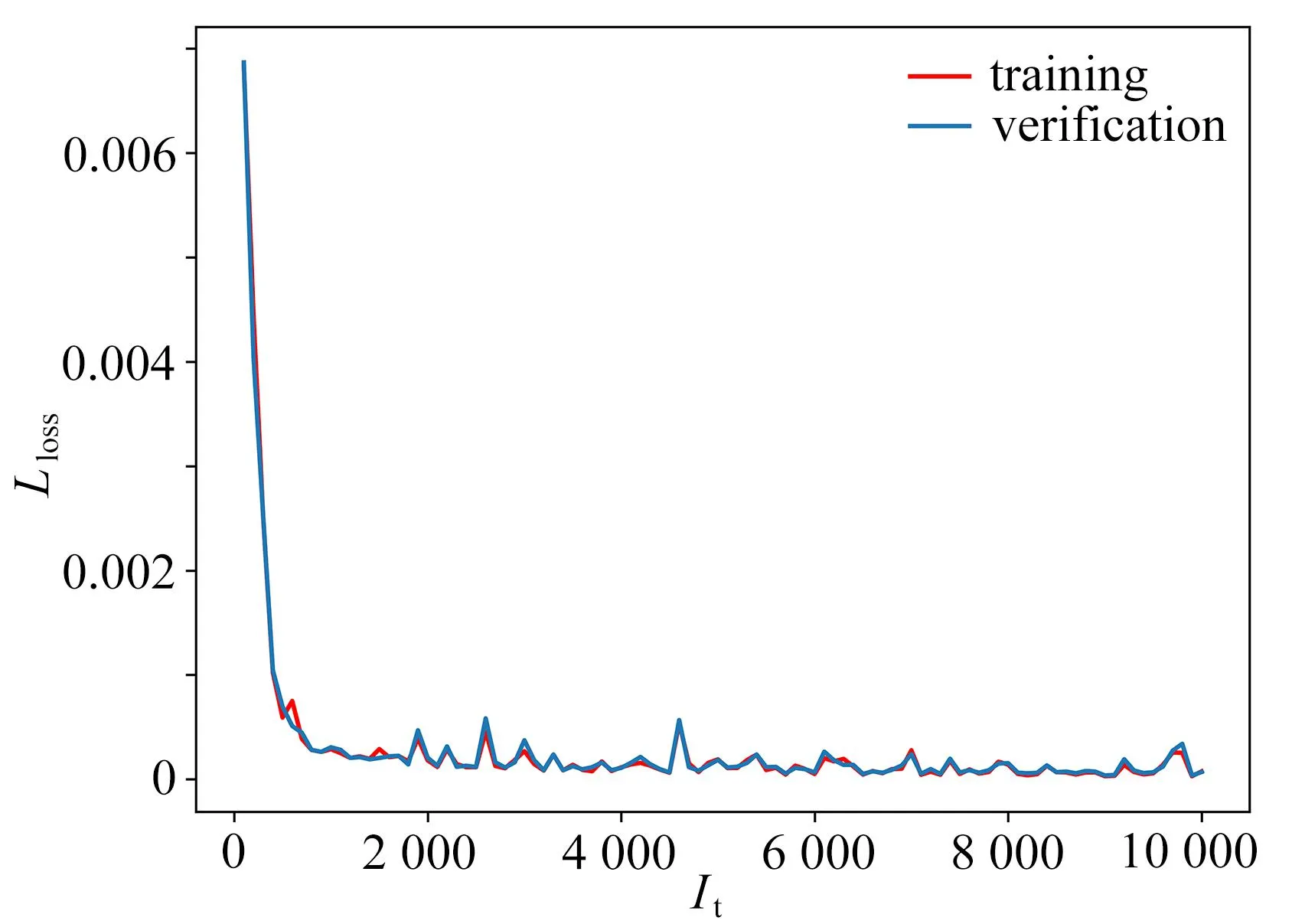
图12 训练集和验证集的损失函数收敛曲线
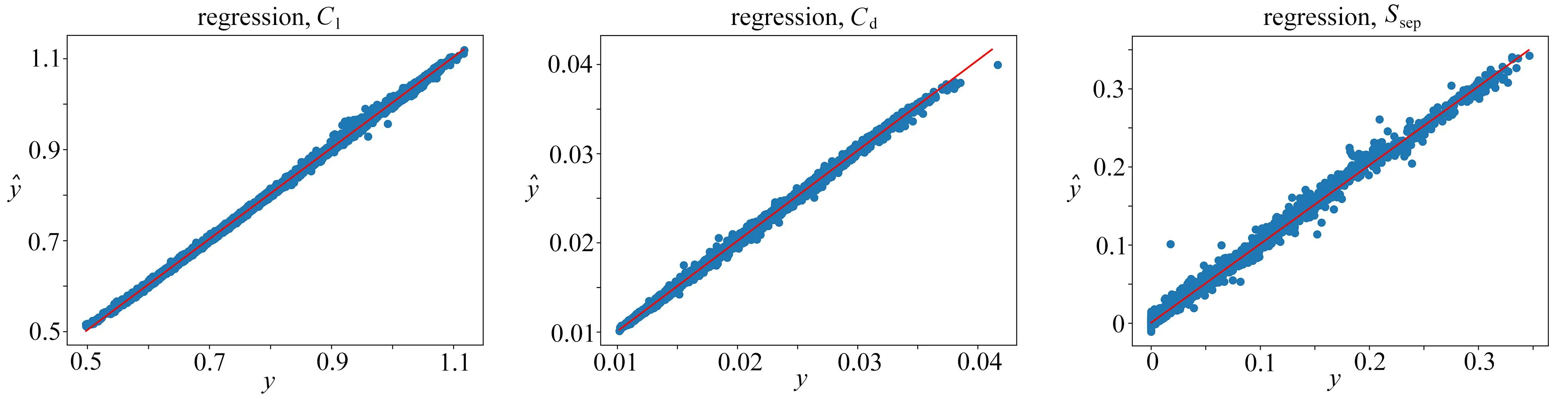
图13 整体数据集预测的Cl, Cd, Ssep的线性回归图
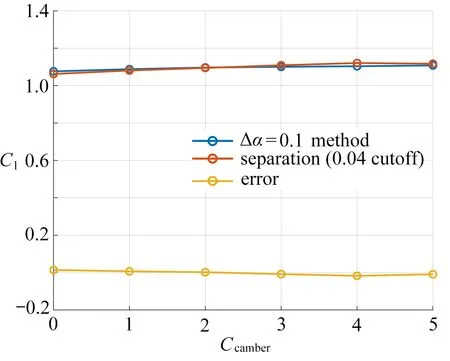
图14 初始翼型不同弯度下的抖振边界
以此DDPG算法进行寻优,收敛曲线如图15所示,横轴为训练代数,纵轴为奖励函数值.其中红色曲线为5步修型,actor动作上限为状态空间大小的1/5,即actor通过5步可至状态空间内的任意状态,actor在达到给定升阻比以上或是累计5步后停止修型.蓝色曲线为 1 步修型,actor动作上限为状态空间大小,即1步可至状态空间内的任意状态.

图15 DDPG收敛曲线
为验证DDPG方法设计结果的合理性,用优劣两种群智能算法对本文模型的优化结果作对比,算法为PSO[38]和改进GWO[39].两种算法流程相似,如图16所示,其中适应度为优化目标的相反数(转为min问题),不满足约束的个体适应度受到额外惩罚.两种算法收敛曲线如图17所示,种群大小均为60,改进GWO具有更强的寻优能力,其头狼的额外混沌搜索能显著增强寻优效率和增加跳出局部最优的能力.

图16 群智能算法流程

图17 群智能算法收敛曲线
2.3 结果分析
初始翼型和PSO、GWO、DDPG-5、DDPG-1的优化翼型结果如表3所示,base 0表示不可变弯度的初始翼型,base表示可变弯度初始翼型.第一行为基于优化模型得到的平均最大升阻比,第二行为算法运行时间.第三、四行为各翼型CFD计算验证,分别是平均最大升阻比和抖振边界.
其中各翼型基于优化模型和CFD计算得到的升阻比相近,误差在0.5%以内,说明本文基于ANN的优化模型的精度是可以接受的.GWO、DDPG-5、DDPG-1优化升阻比相近,且相比于PSO有更大的优化效果,说明了本文DDPG算法对变弯度翼型优化模型有着较强的优化效果,与较优的群智能算法有相当的优化能力,这是actor-critic网络架构和衰减噪声的作用.actor-critic的结构使得DDPG算法能够更容易和更稳定地学会修型策略,衰减的噪声则在保证后期收敛能力的同时增强了前期的探索能力,保证了DDPG算法较强的寻优能力.而分离函数在升力系数1.075前不大于0.04的约束也使得各优化翼型均有不小于1.075的抖振边界,淘汰掉了以降低抖振性能为代价减阻的一批翼型.最后在算法效率方面,虽通过ANN替代了CFD计算过程,但每个翼型以不同弯度和迎角对ANN的多次调用仍是算法运行的主要时间消耗,如何从更少的样本中学会优化方式是算法效率的关键.DDPG算法一边根据当前策略填充经验池,一边从经验池中抽取历史经验学习,可实现对于历史经验的重复使用,使其在样本利用率方面具有显见的优势,也就具有了优于群智能算法的强大寻优效率.而1步修型的DDPG-1在相同算法代数下仅生成和使用5步修型1/5的经验数据,也就具有近5倍的算法效率,且优化能力也不差于其他几种,故DDPG-1无疑是本文优化能力强且效率最高的算法,其优化结果相比于初始不可变弯翼型也取得了6.8%的升阻比提升.

表3 优化结果比较
初始翼型和不同优化翼型的升阻比曲线如图18所示,曲线的拐点是弯度发生变化,从升力系数0.7至0.9每条曲线的襟翼角度均从0°逐渐增加至5°.图18中每条曲线均等价于图2中的紫色曲线,是不同弯度下升阻比曲线的最大值.随升力系数增长,升阻比与迎角均增长,在达到拐点时,弯度与迎角发生突变.之后升阻比与迎角均随升力系数继续增长,形成整条最大值曲线.而弯度若能连续变化,这些曲线的拐点也会更加细密,拐点处也就不会呈现严重的不连续现象,或者说曲线本身就会更加光滑连续.但曲线所处范围不会在图18的基础上发生太大变化,即平均最大升阻比的值不会有太大变化.而弯度连续变化会使得数据库需求样本量成倍增加,故综合考虑下,本文以离散弯度变化来简化设计.
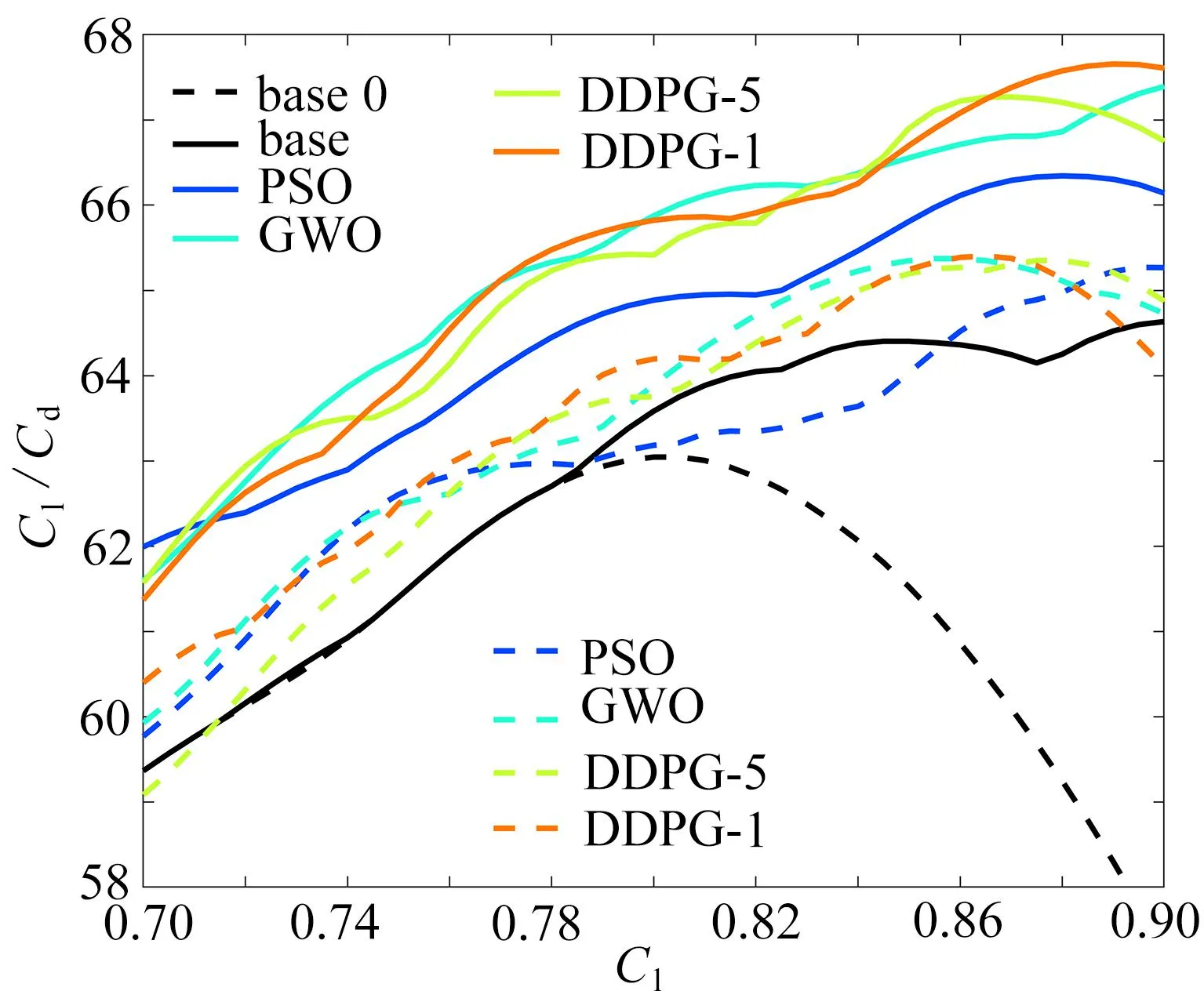
图18 不同方法优化的升阻比最大曲线
图18中彩色实曲线是本文厚度约束不低于初始90%的优化结果,彩色虚曲线是不低于初始100%的结果,黑色实曲线是可变弯度初始翼型,黑色虚曲线是不可变弯初始翼型.初始翼型从通用飞机标准模型CRM机翼上截取,性能本就良好,加入变弯度后在大升力系数工况下更得到明显改善,故彩色虚曲线的群智能算法和DDPG方法在优化翼型基础外形后均只能取得较小性能改善.而适当放松厚度约束后,才能取得如彩色实曲线所示的较大的升阻性能优化.实际翼型设计中,略微放宽厚度约束,也是提升升阻性能的重要手段,但也伴随着机翼容积减少等负面影响,需多方面综合考虑.
实曲线对应翼型基础几何外形如图19所示,可见不同优化结果均是翼型前半段下表面收缩,后半段整体下沉,尾缘变化更加平缓.这些变化使得翼型初始弯度更小,且最大弯度位置前移.一方面使得低升力工况下阻力更小;另一方面通过尾缘变弯获得大升力的同时,最大弯度位置不会过于后移,也对应具有更小的阻力.如此,优化后翼型在不同升力系数工况下均具有比初始不可变弯翼型更优的升阻性能,在整段巡航中具有更高的效率.
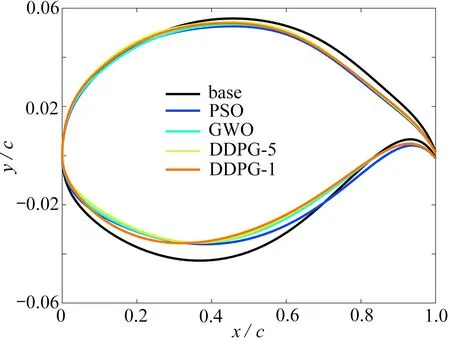
图19 不同方法优化的几何外形
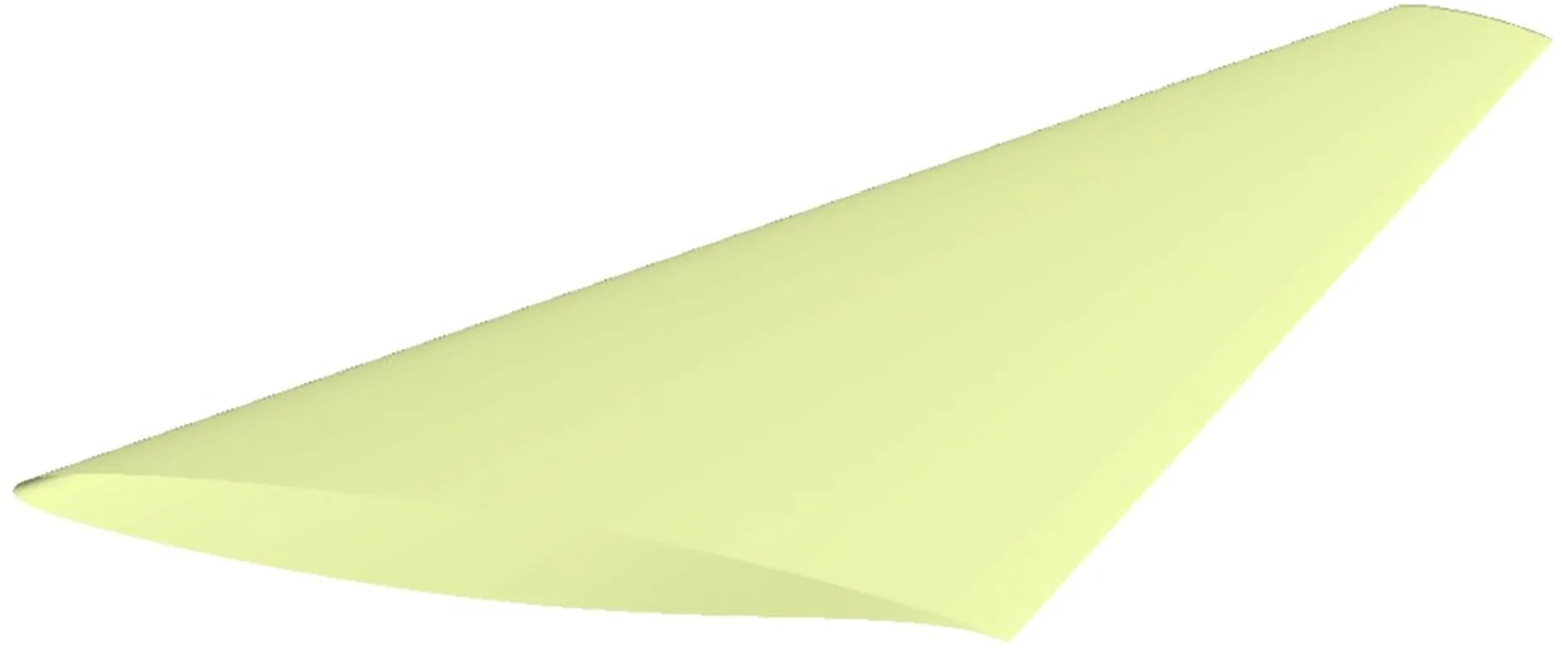
图20 锥形后掠翼
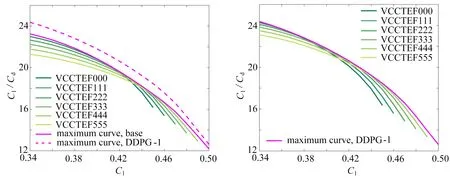
(a) 初始 (b) DDPG-1优化后(a) Initial curves (b) Curves after optimization by DDPG-1图21 机翼升阻比曲线
基于仅优化一个截面翼型的基础,分别以初始翼型和DDPG-1优化翼型作截面,参考CRM机翼外翼段,以弦长1、展弦比6.6、后掠角35°、稍根比0.376作锥形后掠翼.根据改进2.5D方法对应三维工况为Mach数0.9,升力系数0.446,这里外翼段后掠角不等同于CRM机翼后掠角,故三维工况有些变化.锥形后掠翼几何外形如图20所示,升阻比曲线如图21所示.可见变弯度提高了多工况下的升阻比,且DDPG-1优化也提高了后掠翼的升阻性能,说明变弯度以及二维翼型优化对三维机翼优化有着实际的贡献.
3 总 结
1) 本文基于VCCTEF思想设计了一种变弯度翼型优化模型,通过翼型基础几何外形优化和弯度改变实现巡航多升力系数工况升阻性能提高,进而提升整段巡航性能.
2) 本文基于抖振与流动分离的伴随关系,发展了二维翼型分离函数方法,通过对上表面流动分离的约束,限制抖振边界不低于初始翼型,避免升阻性能优化带来抖振性能衰减的负面影响.文中也通过对比传统抖振边界判断Δα=0.1方法验证了本文分离函数方法的有效性.
3) 本文将DDPG方法应用于上述变弯度翼型模型在巡航阶段的多升力系数工况优化,通过对算法的设置,实现DDPG智能体对多弯度多约束复杂模型的快速高效寻优.并通过与群智能算法优化结果的对比,验证了DDPG方法的可行性与高效性.
4) 本文以上述优化模型与方法实现了CRM机翼截面翼型的变弯度设计与优化,实现了巡航阶段6.8%的升阻比提升,并通过2.5D方法验证了二维变弯度翼型设计对三维机翼设计的贡献.
