激光全息照相景深扩展实验探讨
2013-12-01肖怡安
肖怡安
(武汉大学 物理科学与技术学院,湖北 武汉430072)
1 引 言
激光全息照相原理指出,拍摄某物体时,在记录介质上必须记录下物体光波和参考光波叠加相干所形成的干涉图样,即全息图.只有这样的全息图,物体光波的全部信息才能被记录下来.再现时才能重新获得各个物点的光波,即清晰地看到物像.如果物体上只有局部物点散射的物光波和参考光波叠加相干形成全息图,也就是只有局部物光波被记录下来.再现时不能重新获得相应的局部的物光波,即只能看到局部模糊的物像或形成暗区.这是由于另外一些物点散射物光波虽然也和参考光波叠加,但由于未能相干形成对应的全息图,因此介质上未能记录下这些物光波的信息,致使物像上局部模糊甚至形成暗区.
来自同一激光器,物点散射的物光波和参考光波能否叠加相干形成全息图,取决于该点物光波和参考光波的光程差与激光器相干长度的关系.光程差小于相干长度的物光波能够形成全息图而记录下来;光程差大于相干长度的则物光波不能被记录下来.因此,下面简单介绍激光器的相干特性和相干长度.
2 影响全息照相景深的若干因素
普通激光器容易做到横基模输出,因此空间相干性是很好的.但是激光器的时间相干性,由于纵模输出模式的不同而有很大差别.单纵模输出,相干特性很好;双纵模或多纵模输出,则相干特性变差.如图1所示,纵轴表示由激光器分出的2束光叠加相干形成的干涉条纹的可见度,即激光器的时间相干度.横轴表示2束光的光程差.图1中分别给出不同的纵模模式(N=1,2,3,4)对应的相干条纹可见度Y随着光程差X 变化的情况.
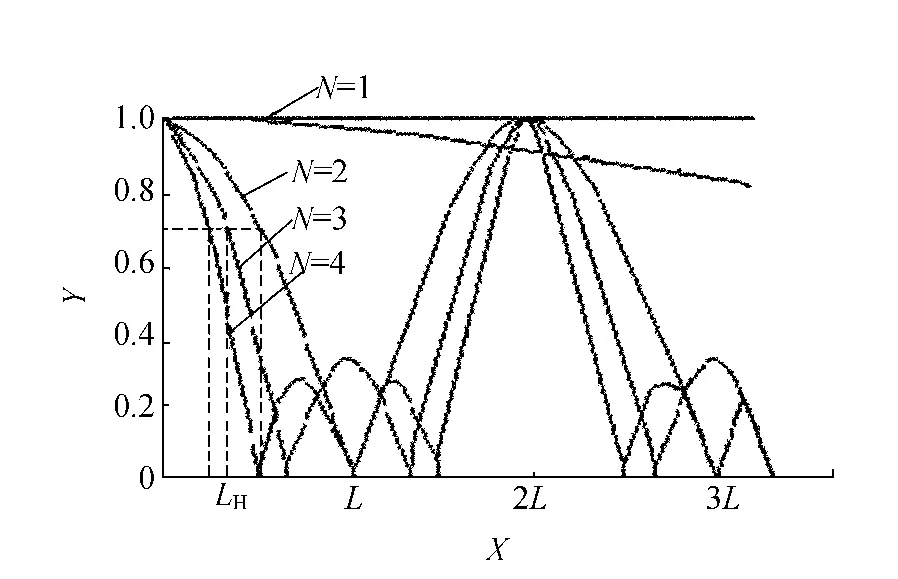
图1 激光器纵模输出时间相干特性
分析图1的曲线分布,可以得出[1]:
1)多纵模输出激光器分出的2束光的相干条纹可见度,即激光器的时间相干度随着光程差产生周期性变化,其极大值出现在光程差为激光器腔长偶数倍处.
2)在光程差偏离这些极大值处,其时间相干度很快下降.通常认为时间相干度下降到以下,即认为2束光不再相干了.对于相干度保持在以上的,即认为2束光完全相干.激光器的相干长度就是根据这一特性定义的,即相干度从1下降到时,其对应的光程差定义为激光器的相干长度LH.
3)理想单纵模输出激光器,时间相干长度保持1不变,即相干长度无限长.但是,实际上单纵模输出的激光器,其波长总有一定带宽,因此其相干长度总是有限.较好的单纵模输出的激光器,其相干长度可达几km,甚至是几十km.
一般地讲短腔长的激光器纵模输出较好,时间相干特性好,对应的相干长度较长,但输出功率较小.反之较长腔长的激光器其纵模输出较差,时间相干特性差,对应的相干长度较短,但输出功率较大.对于激光全息照相而言,我们既希望激光器的相干长度长,又希望其输出功率大.但是实际上这2点要求常常相互矛盾,只能根据拍摄对象的不同来选择激光器.较小的物体,需要激光覆盖的面积小,对激光器功率的要求不是主要的,因此可选择较短腔长的单纵模输出激光器.对于较大物体,虽然较长腔长的激光器是多纵模输出,相干长度也较短,但需要功率输出较大的激光,因此只能选择较长腔长的激光器.
本文正是针对具有较大景深的物体选择输出功率较大的激光器,在其相干长度较短的情况下,采取光程补偿方法,以期获得激光器相干长度较长的效果.
3 改善全息照相景深的实验方法
下面介绍几种光程补偿扩展全息照相景深的实际光路.
3.1 参考光扩展拍大景深物体组三维的全息图方法之一:三角形参考光程补偿
在激光器的相干长度较短的情况下,具有较大景深的物体,其各个物点漫射的物光波与选定的参考光波的光程差,常常不能都同时落在相干长度之内.对于不能满足相干条件的物点,需要选择另一束参考光,即对原来的参考光进行光程补偿,使补偿后的光程差重新落在相干长度之内[2].如图2,选用激光器腔长为1m,相干长度约为25cm,功率约为30mW的He-Ne激光器.选择物体为约有30cm景深的3个物体O1,O2和O3,其中O1和O2二物体相距约为12cm,O2和O3二物体相距约为18cm.控制原参考光R′光程与O1物光程约相等.由BS2和M5及M6组成的三角形光路,使其中一部分参考光增大了光程.这增大了光程的参考光R″部分可与光程最长的那部分物光(O3上漫射来的光)相干涉,而不通过三角形光路的参考光R′与光程较短的那一部分物光(从O1和O2上漫射来的光)相干涉(O1和O2间距离小于激光器的相干长度).选择三角形参考光R″光程补偿约等于25cm,使参考光R′+R″光程略大于O1物光程而小于O2物光程,以保证参考光R′+R″光程与O1物光程、O2物光程之间的光程差小于相干长度25cm.遮挡补偿光路,拍照第1张全息图,再现时只能看到2个物体O1和O2.打开补偿光路,拍照第2张全息图,再现时可同时看到3个物体O1,O2和O3,获得全息照相景深扩展的明显效果.从图3实验全息片可看出,没有补偿前图像不清晰;而参考光进行光程补偿后,就可得到清晰的图像.
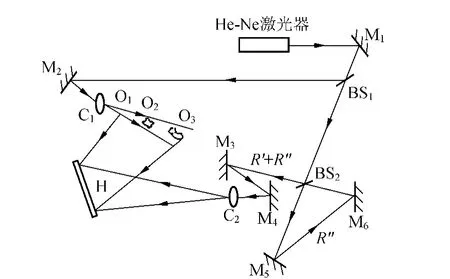
图2 三角形参考光程补偿
原参考光R′与补偿后的参考光R″容易产生背景干涉条纹,影响再现物像的视场.克服这一有害因素的有效方法,一是补偿光程略大于相干长度,使其R′与R″相干可见度下降;二是使产生的背景干涉条纹间距增大,最好使整个亮条纹覆盖干板.参考光强IR′和补偿参考光强IR″的选择应满足通常全息照相选定的物光强与参考光强的比例关系.即在干板处原参考光强IR′与物体部分光强(IO1+IO2)的比例关系以及补偿参考光强与物体另一部分光强的比例关系应满足3:1~10:1.这样,就记录了整个物体组的全部信息.

图3 实验全息片
3.2 参考光扩展拍大景深物体组三维的全息图方法之二:矩形参考光程补偿
在相干长度较短的情况下,具有较大景深的物体,其各个物点光波与选定的参考光波的光程差,常常不能同时都落在相干长度内.因此对于不能满足相干条件的物点,依据三角形参考光程补偿原理.选择另外一束参考光,即对原来参考光进行光程补偿,使其补偿后的光程差重新落在相干长度内.如图4,于是原来不满足相干条件的物点,由于匹配另一束参考光R″(光程补偿)重新满足相干条件[3],使未补偿参考光R′光程与O2的物光程约相等,与O1和O2的物光程光程差应小于相干长度.使补偿后的参考光R′+R″光程与O4的物光程约相等,与O2和O3的物光程光程差应小于相干长度.与三角形参考光程补偿方法比较,由于增加参考光的透射次数,因此带来较大的光能损失,但为某些特殊物体的景深拍照的光路布局提供较大灵活性.

图4 矩形参考光程补偿
3.3 物光扩展拍摄大体积物体三维的全息图景深扩展方法
物体三维的全息照相是以干涉条纹的形式记录下物光波的信息,只有和参考光波干涉的物信息才能记录下来,没有和参考光干涉的物信息将损失掉.当被拍摄物体的尺寸大于激光器的相干长度时,从物体上各点漫射出的物光的光程和参考光的光程差就不会都小于激光器的相干长度,即并非物体上各个物点漫射出的物光波都能与参考光波相干叠加,而只有局部物点漫射的物光波才与参考光波相干涉形成全息图.全息图上只记录了这一部分物信息,再现时,就只能重现这一部分物光波,使再现像局部模糊甚至出现暗区.为了尽量减少丢失物体的信息,采用物光扩展的方法把物光分成2束或更多束,从不同方向分段照明物体[4].如图5的双光束照明,由反射镜M5反射的光波充分照明拍摄物体的左半部分,这一部分的各个物点漫反射的物光波的光程与参考光的光程差都小于激光器的相干长度,被拍摄物体的左半部分的全部信息都以干涉的形式记录下来了.同理由M3反射的光波充分照明被拍摄物的右半部分,右半部分的全部信息也都以干涉的形式记录下来.整个被拍摄物的全部信息完整地被记录而没有损失掉.再现时就不会出现局部模糊和暗区,得到清晰完整的再现像.

图5 物光光程补偿
与利用参考光光程补偿的方法比较,采用物光光程补偿较参考光光程补偿更有突出的优点,此方法清除了参考光程补偿时所产生的有害视场的背景干涉条纹.由于对物光程的补偿,物光漫散射带来更大的光能损失,因此使用功率较小的激光器进行全息照相时,应用这种方法比较困难.
4 结 论
综上所述,全息照相景深扩展采取的光程补偿方法是灵活的.虽然光程补偿表象上提高了激光器的相干长度,但实际上光程补偿并没有实质性地改善激光器的相干特性,恰恰相反光程补偿的条件是必须满足激光器的相干特性.
[1]肖怡安.全息照相中的景深[J].大学物理实验,2001,14(1):18.
[2]王路威.全息图的拍摄[J].成都大学学报,2001,20(7):24.
[3]林有义,高淑梅,赵志敏,等.大景深多重全息术及其应用[J].光学学报,1994,14(12):1255.
[4]王策.大幅面大场景全息照相[J].激光杂志,2000,21(4):23.
