基于改进Canny算子的空压机曲轴轮廓提取
2024-01-26席晨馨官世杰
席晨馨,官世杰
(1.东华大学 机械工程学院 上海 201620;2.重庆交通大学 机电与车辆工程学院 重庆 400074)
0 引言
曲轴是汽车空气压缩机的关键组成部分,而且曲轴在反复的循环运转过程中由于承受交变载荷往往会出现失效和疲劳断裂等问题,进一步产生很多难以控制的问题.随着计算机与数学的发展,数字图像处理技术逐渐形成了一门独立、应用前景广阔的学科.目前的轮廓提取技术也在不断发展,并在遥感图像[1]、制造业[2]、城市建筑[3]、农业[4]、工业[5]、畜牧业[6]、汽车[7]和生物影像[8]等领域得到了广泛应用.
但目前国内外对工业零件轮廓提取的研究仍需丰富完善,尤其是在新能源商用车的空压机曲轴轮廓提取方面.曾定邦等[9]采用基于Delaunay三角化的曲线重建算法来将切片截面重构出曲轴轮廓线.毛向向等[10]提出了一种薄壁零件复杂光照情况下的轮廓特征识别算法用于薄壁零件的图像恢复和轮廓识别.袁宗艳等[11]用激光扫描获取工业设计数据,利用自适应加权曲线拟合获取连续点,提取精密工业零件三维轮廓边缘.对于以上文献提出的工业零件轮廓提取方法均存在提取轮廓不完整,噪声条件下误差较大等问题,因此本文采用数字图像处理技术提出了一种改进的空压机曲轴轮廓提取方法.通过面向对象的设计方法将图片进行更好的处理,并采用改进的和传统的Canny算子进行比较实验,验证本文所提改进的Canny算子的优越性.
1 轮廓提取预处理流程
对于加工好的曲轴,为了保证曲轴的质量,在完成加工后采用图像处理技术对曲轴轮廓进行提取分析,监测所得曲轴是否有缺陷.本研究中选用东风140型空压机曲轴进行实验.在提取轮廓前,由于环境、光照等的影响,相机采集到的图像不能直接用于提取,需要对原始图像进行一系列的预处理,如灰度变化、平滑处理和阈值分割.整个预处理流程如图1所示.

图1 曲轴轮廓提取预处理流程Fig.1 Pre-processing flow of crankshaft profile extraction
1.1 灰度变化
由于相机采集到的图像为用R、G、B表示的3通道彩色图像,数据量大,需要占用较大的存储空间.因此,需要通过灰度变化将彩色图像转化成灰度图像,用0到255之间不同的数字代表图像的灰度等级,将其转化为一个二维数字矩阵,从而提高后续计算机的处理速度.如图2所示分别为进行灰度变化前后的图像.

图2 灰度变化前后对比图:(a)原始图像;(b)灰度图像Fig.2 Comparison before and after gray scale change:(a)Original image;(b)Gray scale image
1.2 平滑处理

图3 导向滤波后效果图Fig.3 Effect after guided filtering
通过相机采集到的曲轴图像含有各种不同类型的噪声,为了提高曲轴图像的识别准确度,所以要对拍摄到的曲轴图像进行滤波平滑处理,降低噪点.但进行滤波降噪会使图像变得模糊,边缘明显特征消失.因此,需要在保证曲轴图像边缘信息的同时减少周围粗糙杂质的影响.在滤波平滑过程中,本文选用了具有保边作用的导向滤波器和双边滤波器进行对比分析,二者在平滑图像的同时可以很好地保证图像边缘.在执行过程中选用双边滤波器所需时间为1.010 1 s,选用导向滤波器所需时间为1.004 1 s,通过对比最终选择了计算速度较快的导向滤波器.如图3所示为导向滤波后所得效果图.从图3中可以看出滤波后曲轴轴颈部分变得光滑,且曲轴边缘和背景表达清晰,很好地保留了曲轴的边缘信息.
1.3 阈值分割
波后对图像进行二值化,将曲轴与背景分割开,突出目标曲轴轮廓.由于环境等的影响,固定阈值每次需要重新设定,不具有普适性.本文使用自动阈值分割方法,自动对256个亮度级别的灰度像素进行分割,得到能够表现曲轴整体特征的图像.将它分成两个灰度值,分别描述曲轴图像的前景和背景的二值图像[12].
G(i,j)=1,G(i,j)≥T,
(1)
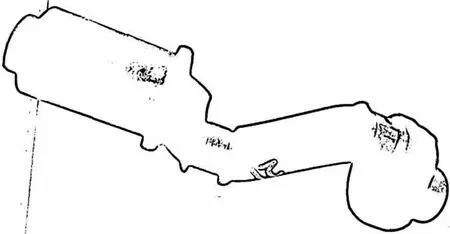
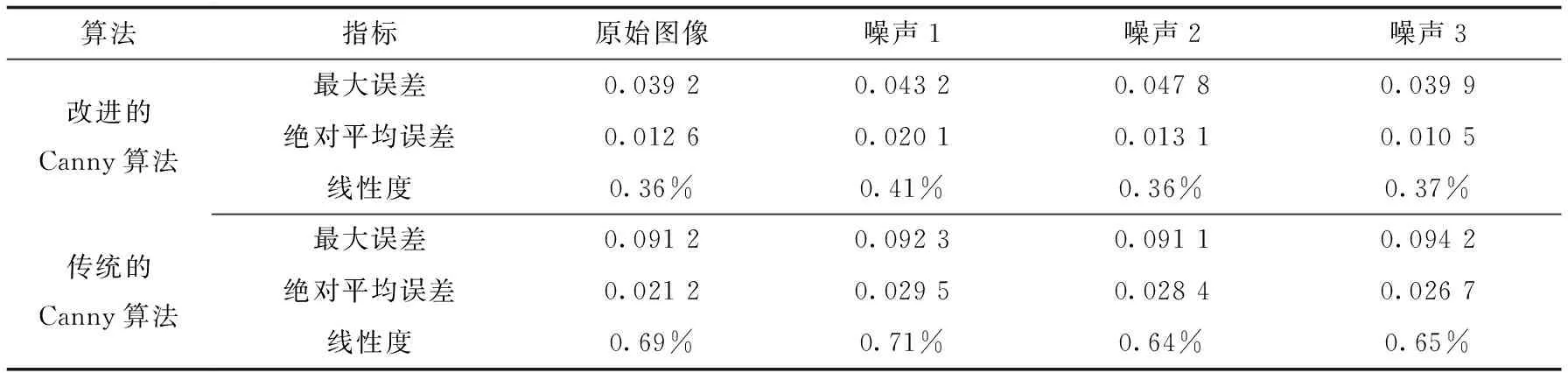
G(i,j)=0,G(i,j) (2) 图4 原始曲轴图像灰度直方图Fig.4 Grayscale histogram of the original crankshaft image 首先对曲轴的灰度直方图进行分析,图4给出了原始曲轴图像的灰度直方图.根据图4可以看出曲轴图像和背景的灰度对比较大,因此,选择自动阈值分割的方法可以很好地将曲轴和背景区域分割开来. 计算像素周围25×25大小像素块的加权均值并进行分割,如果中心点亮度减去领域亮度大于5,设为灰度极大值255白色;如果中心点亮度减去领域亮度小于5,则都设为灰度极小值0黑色.图5所示为二值化后的曲轴图像. (3) 图5 曲轴二值化效果图Fig.5 Effect of crankshaft binarization 在图像边缘提取过程中,常用到的算子有多种,如Robert算子、Sobel算子、拉普拉斯算子和Canny算子等[13].与其他传统轮廓提取算法相比,传统Canny算子虽然具有边缘定位准确、正确率高等优点,但也有很多不足.比如高斯方差和双阈值都是人工手动设定的,自适应能力较差,同时Canny边缘检测算法利用2×2邻域内一阶偏导的有限差分计算梯度幅值,因而会导致对噪声敏感,会检测出很多伪边缘.因此本文提出了一种改进的Canny边缘检测算法,对比研究传统Canny算子和改进Canny算子两种轮廓的提取结果. 采用传统Canny边缘检测第一步用高斯模糊算法进行滤波减少噪声,但是同时也会使图像变得模糊,边缘信息减弱,在后面的步骤中有可能漏掉一些弱边缘和孤立边缘信息.如果增大高斯模糊的半径,加大对噪声的平滑力度,但也会使最后得到的图像边缘变得模糊,导致滤波后的图像达不到所需要求.因此,本文采用导向滤波器对Canny算法进行改进,导向滤波可以有效地保护图像的边缘信息不会丢失. 使用导向滤波器对空压机图像进行平滑去噪,构建输出图像的函数. qi=akIk+bk. (4) 式中:i为像素坐标;I为引导图像素值;q为线性函数拟合的输出图像;ak、bk为线性函数的两个参数,k为线性函数的适用范围. 为了防止线性函数的参数过大引入了正则化参数λ,得到滤波窗口的代价函数. (5) 采用线性回归对上述方程求偏导,求得ak和bk. (6) (7) 式中,Ik和σ2是导向滤波窗口内的均值和方差. 传统 Canny 算子简单但在曲轴的边缘提取过程中存在着一定的缺陷,采用两个方向的一阶差分会损失一些信息使得曲轴轮廓的一些信息无法检测到,因此,提出了用改进Canny算子的8方向模板进行图像梯度计算,定义式如下: Sx=|f(x-1,y+1)+2f(x,y+1)+f(x+1,y+1)|- |f(x-1,y-1)+2f(x,y-1)+f(x+1,y-1)|, (8) 可以用模板表示为: 为了能够保留更多的边缘信息,本文所采用的是 Canny 算子的 8 模板形式,其可通过旋转扩展得到.再对局部梯度最大的点进行保留,并将非局部梯度的最大值记为零,从而得到更加准确的边缘轮廓.不同环境采集的照片采用同一阈值进行分割效果较差,通过自动阈值分割算法自动选取T1和 T2的值,得到两个阈值的边缘图像,实现对曲轴轮廓的清晰提取. 在对曲轴进行提取前,首先对曲轴图像进行灰度转换,将彩色图像变成灰度图像;然后对变换后的图像采用导向滤波算法进行平滑处理;分别选用传统的Canny算子和改进的Canny算子,采用一阶偏导有限差分的方法计算曲轴图像在x轴和y轴的灰度值,并计算曲轴图像梯度的幅值和方向[14].在处理过程中对梯度进行非最大信号抑制处理,剔除非边缘点;最后采用高低双阈值算法来连接边缘,剔除了由噪声引起的假边缘.采用两种方法提取的曲轴轮廓结果图分别如图6和图7所示. 由图6传统Canny算子曲轴边缘提取结果图可以看出,使用传统的Canny算子边缘检测算法对曲轴图像的边缘进行提取的清晰度低,提取出的边缘较粗糙且不能连续地提取出轮廓,不能准确地表达出曲轴的轮廓结构,误差较大. 由图7改进的Canny算子曲轴边缘提取结果图可以看出,使用改进的Canny算法提取的曲轴轮廓清晰度高,能较准确地表达出曲轴的轮廓结构.对比图6和图7两种方法提取的曲轴轮廓结果图可以看出,使用改进的Canny算法对曲轴图像的边缘进行提取的准确度高,提取出的边缘较细并且连续性好,可以较准确地描绘出曲轴的完整轮廓结构. 为分析上述两种算法抵抗干扰的能力,在仿真实验中添加不同噪声下的环境进行分析.其中噪声1、噪声2、噪声3,分别表示高斯噪声、椒盐噪声和斑点噪声.表1中比较了不同噪声条件下两种算法在满尺度下的最大误差、绝对平均误差和线性度. 表1 不同噪声条件下两种算法的最大误差、绝对平均误差和线性度对比 经过对比发现,利用改进后的Canny算法在一般情况和噪声情况下绝对平均误差和最大误差相比传统的Canny算法更小,线性度较小.说明一般情况和有噪声情况下改进的Canny算法对空压机曲轴的检测会更加精确且一般情况和有噪声情况下误差不会大于5%,可以达到噪声条件下图像提取的精度要求[15],且相比传统的Canny算法更为精确. 本文基于数字图像技术采用Open-CV对用于新能源商用车的空压机曲轴进行轮廓提取.首先对曲轴图像进行滤波平滑处理;然后对平滑后的图像进行阈值分割,将曲轴和背景区域分割开;最后利用改进的Canny算子和传统的Canny算子分别对曲轴轮廓进行提取,并添加不同的噪声对比分析抗干扰能力.实验结果表明,利用改进的Canny方法提取的轮廓清晰度高、连续性好,能较准确地表达出曲轴的轮廓且抗噪声干扰能力更强.同时,本文提出的方法也可用于提取曲轴连杆轴颈滚压后的圆角半径、轴颈外圆轮廓,验证加工出的曲轴尺寸是否达到生产要求,并且这种提取方法还可以用于新能源商用车上其他零部件的轮廓提取.
2 轮廓提取结果分析
2.1 轮廓提取
2.2 边缘检测效果对比分析

2.3 噪声条件下误差分析比较
3 结论