基于TOF测量的红外光电测距传感器研制
2024-01-23叶益诚李红娟
叶益诚,田 敏,谢 勇,李红娟
(上海兰宝传感科技股份有限公司,上海 201404)
0 引言
随着智能设备不断更新发展,对测量传感器提出更高要求,如检测精度、色差性能、温漂特性、环境耐受力。为了满足智能设备的高精度、无接触、远距离测量需求,本文研制了一种面向智能设备检测的光电测距传感器。
1 传感器总体方案
1.1 总体设计
红外光电测距传感器主要由PCB电路板、发射和接收腔体、发射透镜、接收透镜、滤光片组成。PCB电路板是整个结构的核心部分,主要实现光信号发射控制、光信号接收处理以及对外接收上位指令和输出数据。滤光片、透镜、腔体组成了传感器的光学系统。发射管在4.5 MHz方波信号的驱动下发射光信号。在待测目标物表面经过漫反射返回到接收透镜及接收PD上。光信号经过算法处理后,计算出传感器与目标物之间的距离值。传感器整体结构图如图1所示。一体化腔体对发射与接收光路进行隔离。传感器封灌环氧树脂,达到IP67防护等级。
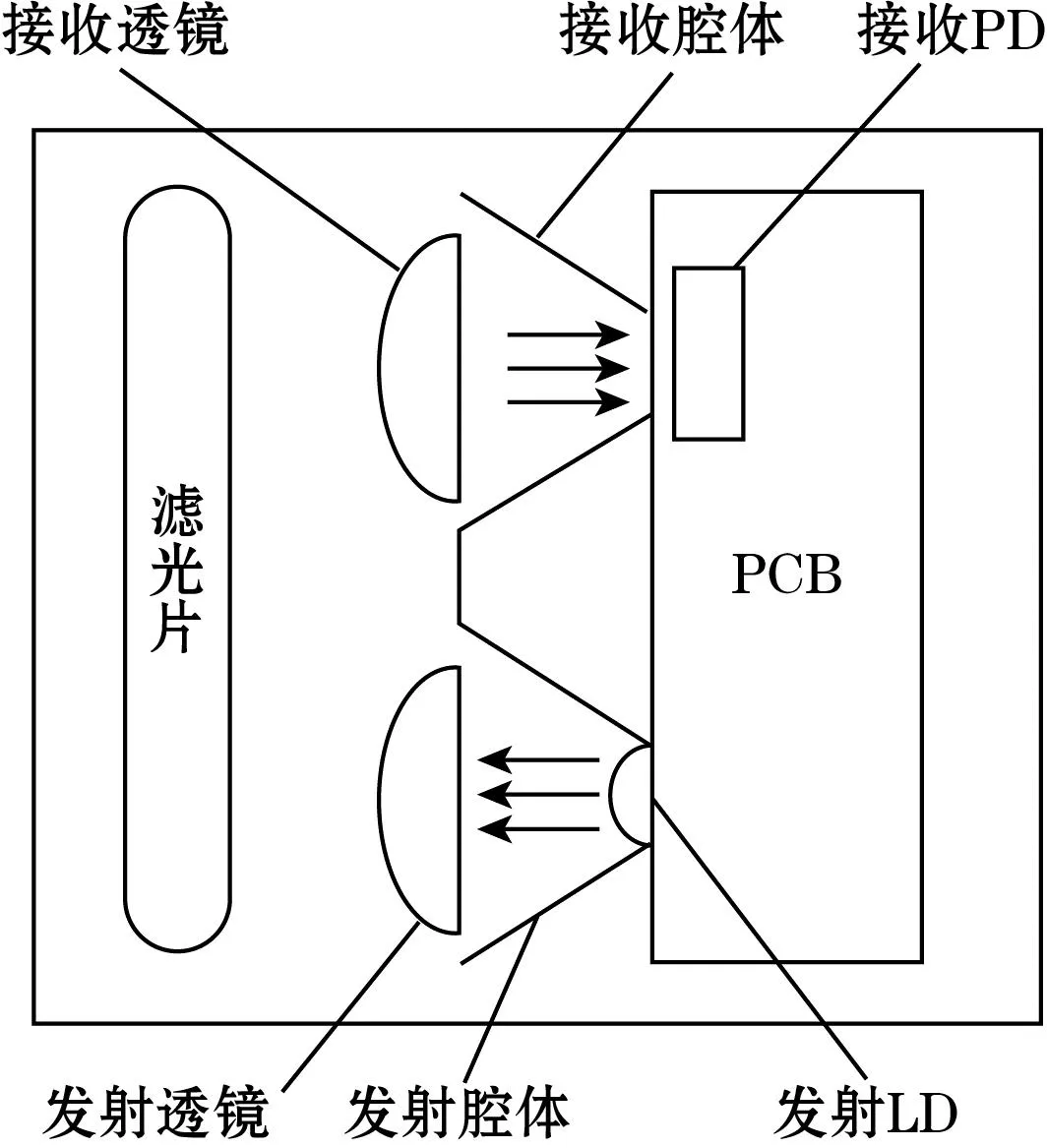
图1 传感器整体结构图
1.2 传感器工作原理
TOF测量原理图示意如图2所示,采用“方波调制-间接飞行时间法(SWM-ITOF)”技术原理,将相位偏移转化为距离测量值。TOF法成像原理是基于测量光往返飞行的时间进而测量成像系统与目标物的距离,采用主动红外调制光,可以在无光照的条件下工作,具有便携性好、集成度高、稳定度高、成本低的优点[1]。目标物体的距离可以通过式(1)计算:
D=(cΔφ)/(4πfmod)
(1)
式中:D为目标物体到传感器的距离,m;c为光速,m/s;fmod为调制频率,Hz;Δφ为发射和接收信号间的相位差,rad。

图2 TOF测量原理图
2 传感器硬件设计
硬件系统采用模块化设计,主要由电源模块、信号采集模块、信号处理模块、信号输出模块组成,如图3所示。硬件系统主要实现电源电压转换、传感器供电、光信号采集处理、测量值输出及通信等功能。
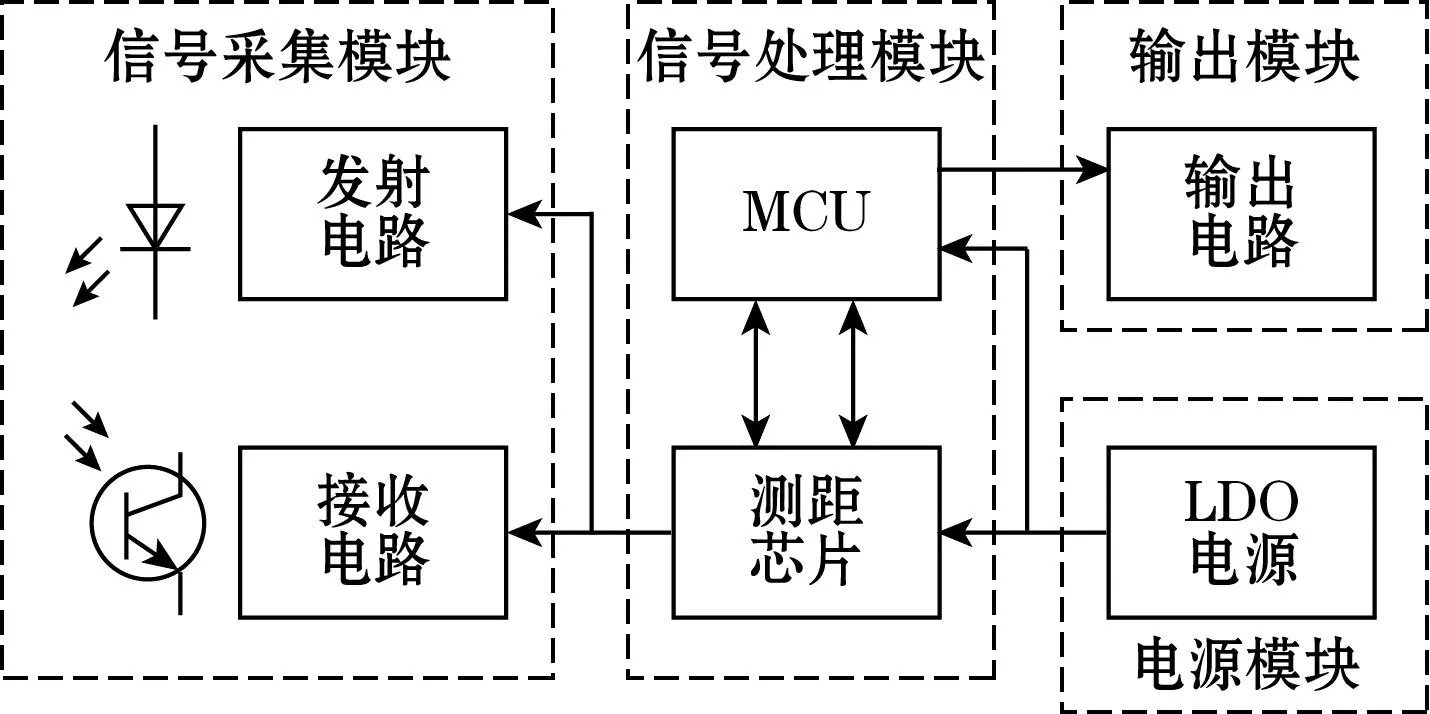
图3 硬件框图
2.1 电源模块设计
传感器供电电源为直流10~30 V,通过两级电路转成3.3 V电压。第1级电源采用DC/DC电源,如图4所示,电压10~30 V被降到5 V。输入端二极管作为逆极性保护,防止电源极性接反损坏电路。一个双向TVS作为ESD保护。输出端通过反馈电阻R5和R7对输出电压进行精准调整。计算公式:Vout= 0.81×(1+R5/R7)。

图4 第1级电源电路
第2级电源电路,采用了LDO电源,如图5所示,其具有高精度、低纹波、小体积等优点。经过LDO电源芯片U2转换为精度为1%的3.3 V电压。其中R2、C5、C6构成输入端滤波电路。C7为启动电容,决定上电延时时间。R4和R6决定输出电压,计算公式:Vout=(R4+R6)/(2R6)。

图5 第2级电源电路
2.2 信号采集模块设计
信号采集模块由发射电路、接收电路和DSP测距芯片组成,如图6所示。U4为测距芯片,是一片DSP处理器。工作时产生4.5 MHz的调制方波信号,驱动D3发射管产生脉冲光信号。D4接收管接收发射光信号,并经过U4测距芯片处理后,计算出相应距离、信号强度、温度等数据,通过I2C接口向外传输给MCU电路。
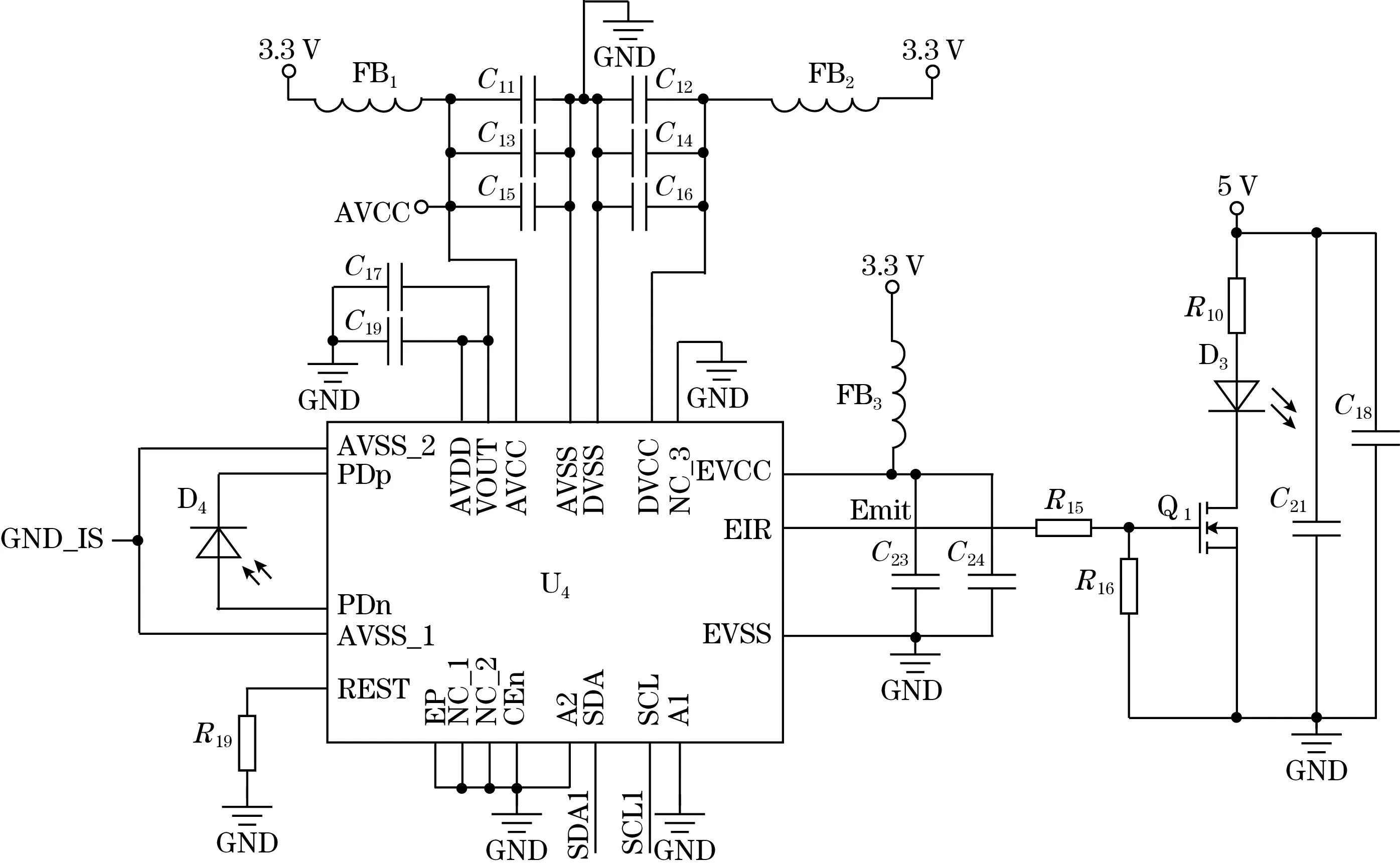
图6 信号采集电路
2.3 数据处理模块设计
DSP测距芯片输出的距离值无法达到精度要求,为提高测量精度,在MCU内采用适当的算法处理测量值。MCU电路如图7所示。MCU采用Cotex内核芯片。DSP测距芯片通过I2C接口与MCU进行数据传输。MCU的UART接口PTB4、PTB3、PTB1连接到IO_LINK输出电路。

图7 数据处理电路
2.4 信号输出模块设计
光电测距传感器具有2种类型输出:一种是普通的IO_LINK推挽输出,另一种是带有通信功能的IO_LINK输出。电路中使用2颗IO_LINK芯片用作推挽输出及IO_LINK单总线通信。图8为IO_LINK推挽输出电路。通过EN、IN2端控制芯片输出开关量信号,可配置成NPN、PNP、推挽输出。输出端通过D6和D82个TVS管进行防护。
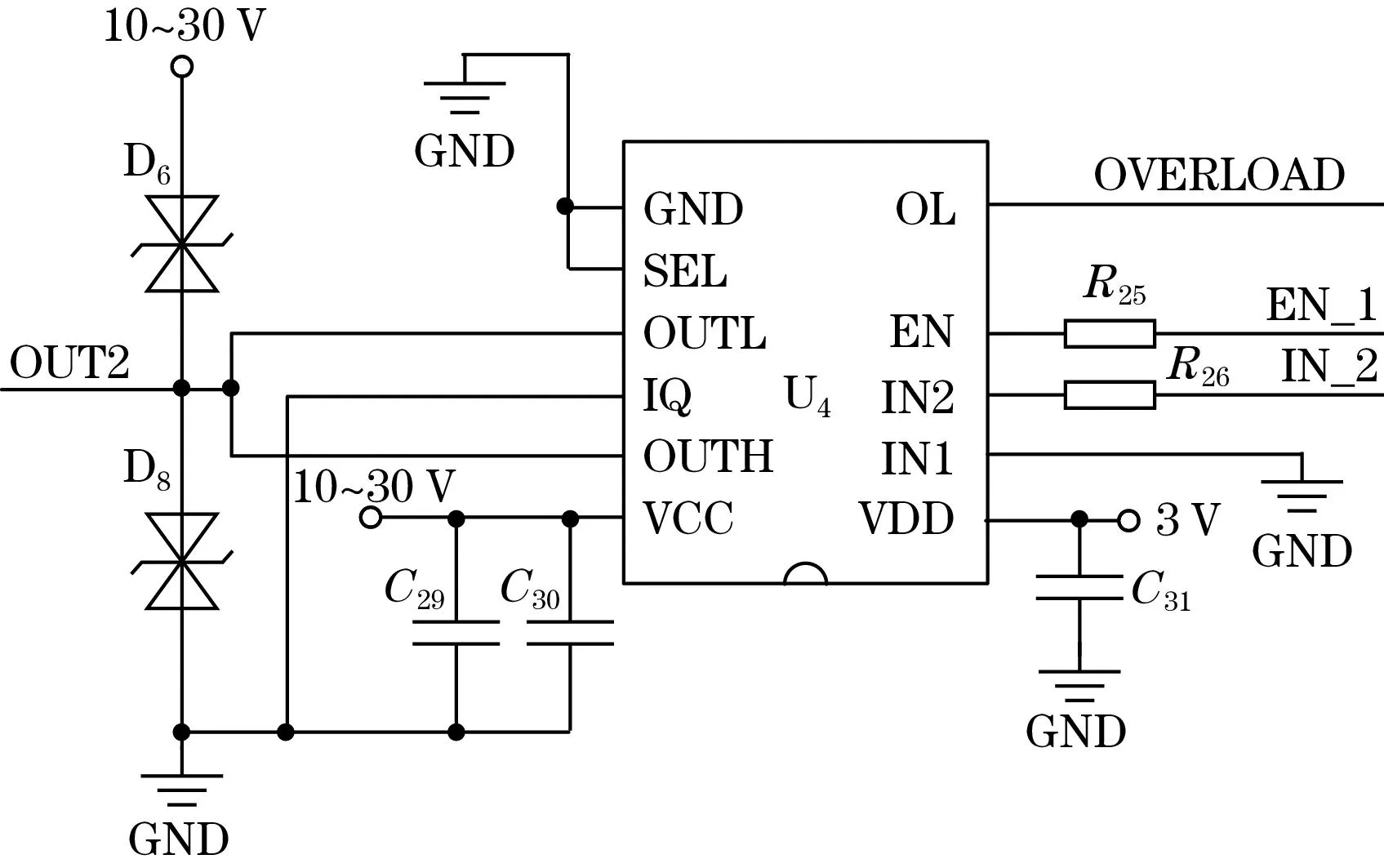
图8 IO_LINK通信电路
L6362A是IO_LINK从站芯片,用2个IO配置成推挽输出、NPN输出、PNP输出,芯片自带过流保护。当用作IO_LINK通信时,用3个IO控制端口(EN、RX、TX)。使L6362A输出端短路200 ms内,当芯片检测到有短路信号时会设置成通信状态,此时如果MCU及时把L6362A配置成IO_LINK通信,即可实现半双工通信。图9为IO_LINK通信电路。与推挽输出主要的区别在于EN、IN2端与MCU的UART端连接、IQ端通过R27与外部通信端连接,便于实现通信功能。

图9 IO_LINK通信电路
3 软件设计
下位机软件框图如图10所示。通过MCU的I2C端口与测距芯片进行通信,实现读取距离测量值、环境光测量值、温度测量值,同时实现环境光补偿、温度补偿、数据标定及IO_LINK配置及输出功能。

图10 下位机软件框图
4 关键技术指标测试
在室内环境下进行线性精度测试,对标准白卡在0~10 m内进行测量,取标准值与测量之间的差值。线性精度曲线如图11所示。
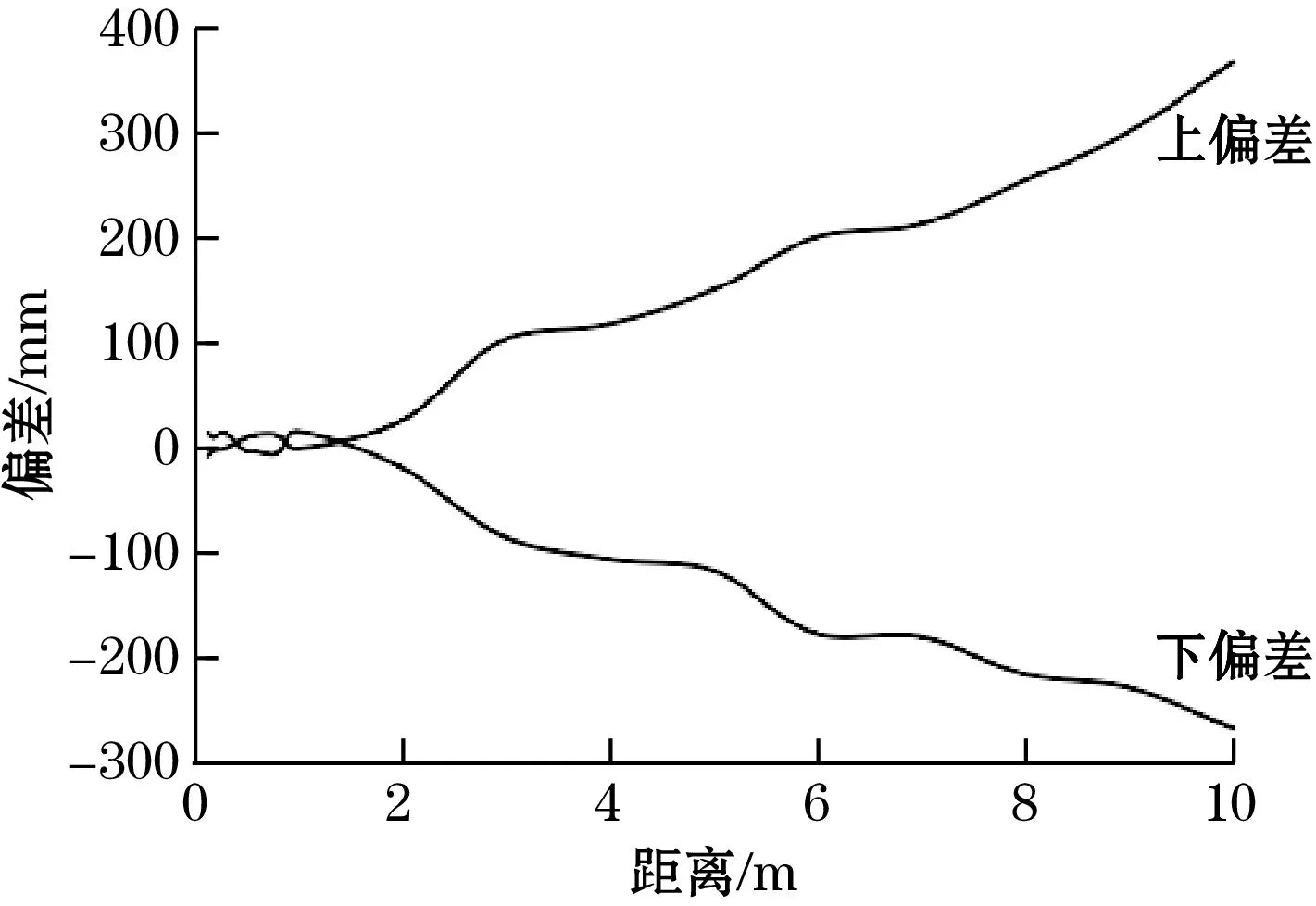
图11 线性精度曲线
在室内环境下进行重复精度测试,对标准白卡0~10 m范围内,每0.5 h记录一次测量值,持续8 h以上。重复精度曲线如图12所示。
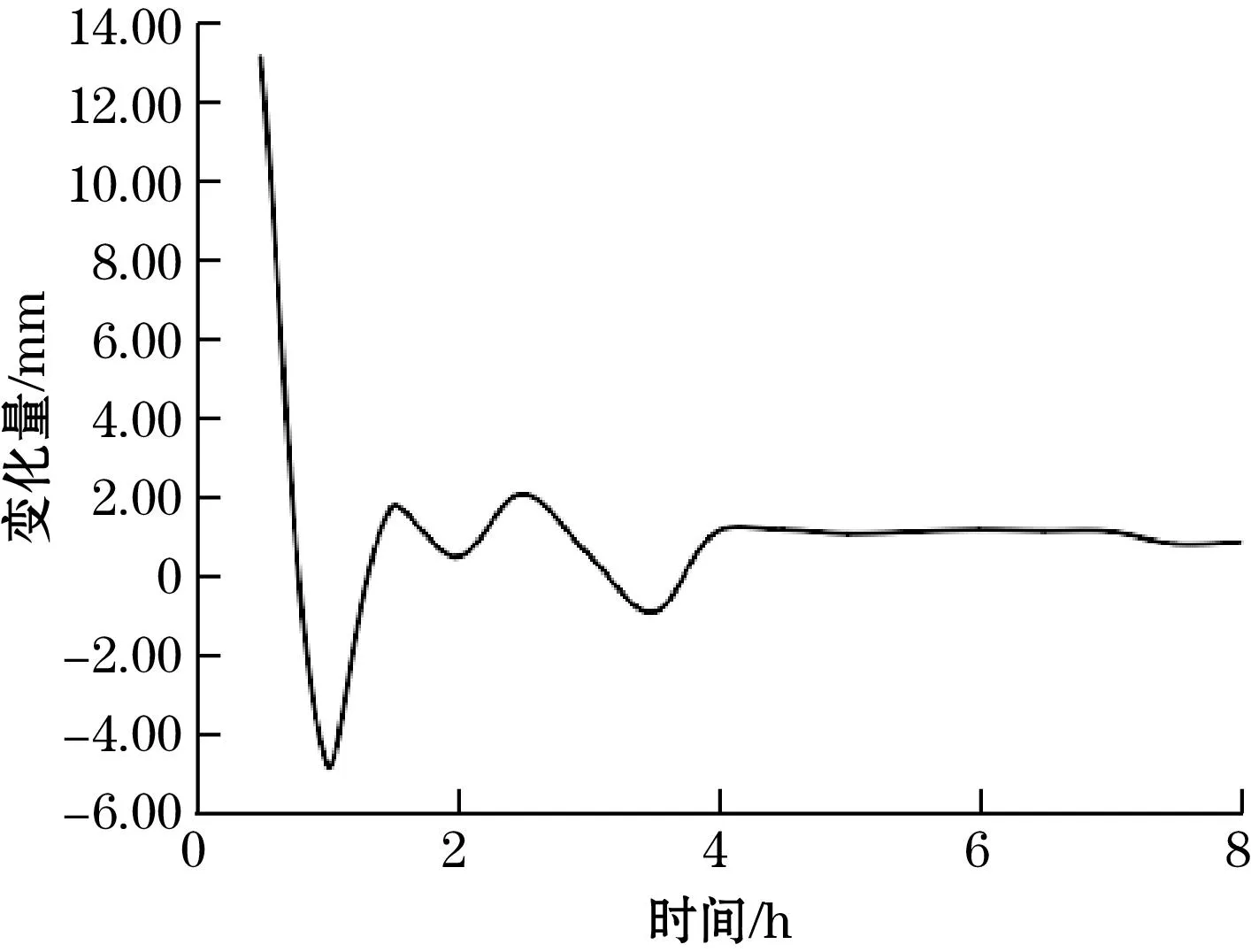
图12 重复精度曲线
在室内环境下进行色敏性测试,分别对标准白卡和黑卡在0~10 m范围内进行测量。两者之差表征色敏性。色敏性曲线如图13所示。在近端2 m内,色敏差值在±50 mm内,远端的最大偏差在±200 mm内。

图13 色敏性曲线
温漂测试在温箱内进行,把传感器和目标白卡置于温箱内。传感器对标准白卡置于1 m处,在-10~75 ℃范围进行测量。温度分别调节至25、0、50、75、-20 ℃,每档温度保持0.5 h以上。确保传感器内部温度基本达到温箱的温度,记录测量值。温漂特性曲线如图14所示。整个温度范围内温度漂移在±15%内。
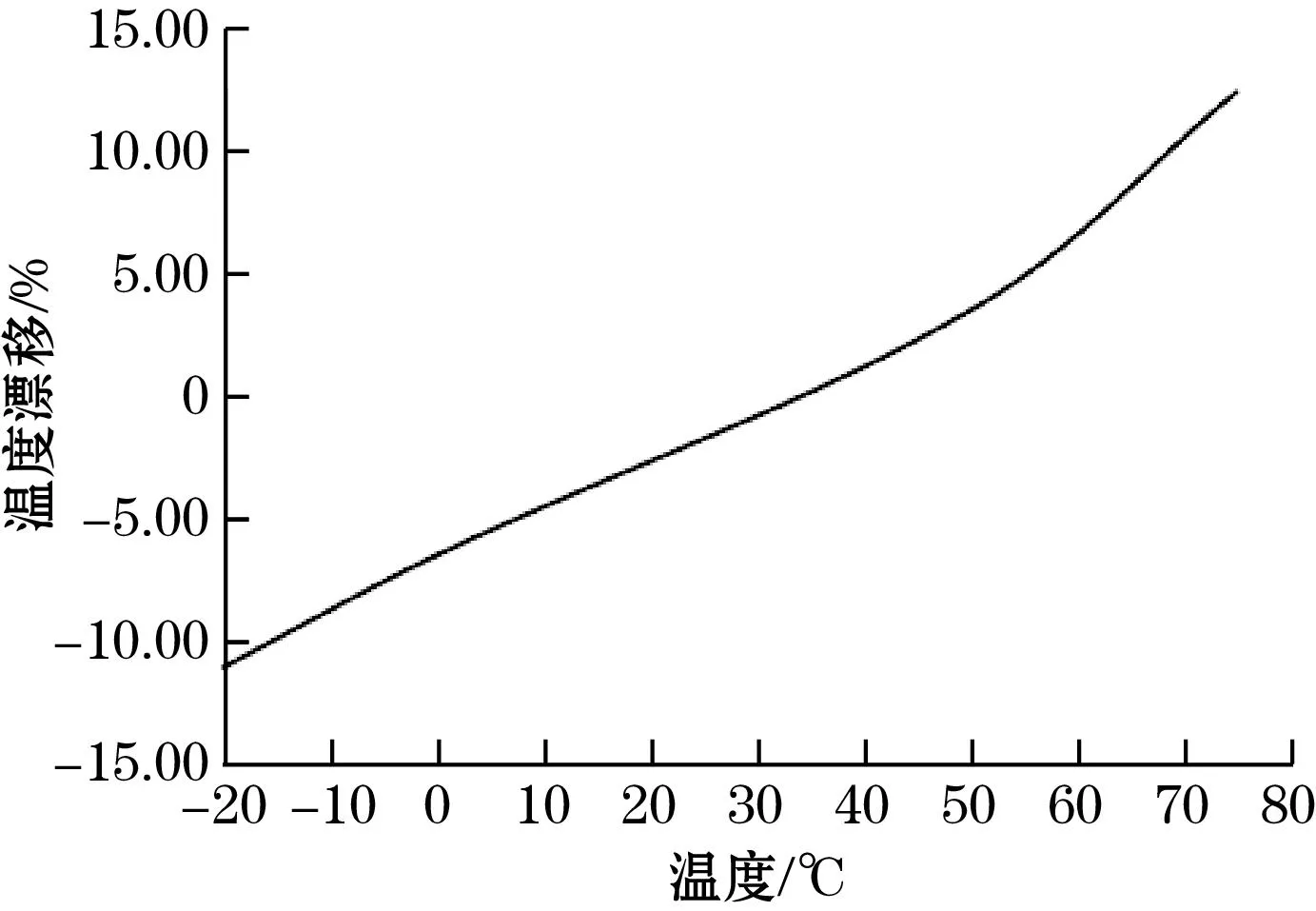
图14 温漂特性曲线
环境光特性测试在室外进行,阳光照度达到10 000Lux。对标准白卡在1~10 m范围内进行测量。环境光特性曲线如图15所示。在近端2 m范围内环境光干扰引起的偏差在100 mm内,在远端环境光干扰引起的最大偏差为250 mm。

图15 环境光特性曲线
5 结束语
文中设计一款利用TOF飞行时间原理进行测量的红外光电传感器,这种传感器结构简单、易于生产、成本低。该传感器能够实现10 m量程内高精度测距。可为智能叉车、VGA小车、无人机等设备提供避障、定高等应用,可抗环境光、具备IP67防护及EMC电磁兼容能力。但该传感器量程有限,在一些大型设备需要更大的量程时,还有待提高。需要继续优化发射光源、光学结构、接收处理模块等,以实现更大量程测量。
