船舶捷联惯导划桨误差补偿优化算法∗
2024-01-23耿腾飞秦浩然李晋威刘思远
耿腾飞 刘 明 秦浩然 李晋威 刘思远
(云南民族大学 昆明 650031)
1 引言
在船舶捷联惯性导航系统中,加速度计与陀螺是直接固联在载体上的,由于船舶的位置会时刻的发生变动,这时候加速度计和陀螺仪采集船舶的运动信息会受到干扰,在对其进行处理时会有新的误差出现,我们需要对其进行补偿来降低其对算法精度得影响。相比与对圆锥误差补偿算法的研究[1~7],高精度划桨误差补偿算法的研究较少[8~12],因此对高精度的划桨误差补偿算法的研究是导航定位所迫切需要的。文献[13]在船舶导航定位速度解算时利用更新周内已知的姿态矩阵推导出一种新的划桨误差补偿积分算法;文献[14]通过分析划桨效应产生的机理,提出一种采用前两周期速度增量和角增量的改进三子样划桨误差补偿算法;文献[15]针对系统陀螺和加速度计输出为脉冲的情况下,在速度更新中引入角速率、角增量等信息,提出一种改进的划桨误差补偿算法。本文在经典的划桨运动条件下,先详细推导了求取误差补偿系数的过程,并在此基础上提出一种采用前一周期速度增量和角增量的划桨误差优化算法,跟传统算法相比精度有明显提高,具有明显优势。
2 划桨效应
在进行分析时,选取“东北天”地理坐标系为研究系统的导航坐标系,此时可得到速度的基本方程:
对式(1)在tm-1到tm时间段进行积分,可得:
将式(4)代入式(3)可得到:
式中最后一项为划桨误差补偿。
3 传统划桨误差补偿算法
传统划桨误差补偿算法的一般形式为
设更新周期为T,假设典型的划桨运动中角速度和比力为
i,j是两正交轴的单位矢量,B,C为角振动和线振动幅值,Ω为振动角频率。
仅考虑直流分量时有以下恒等式:
根据式(9)可得传统算法的一般形式为
此时传统划桨效应的补偿值为
将式(10)和式(11)分别泰勒展开可得:
令式(12)和式(13)的对应项相等可得:
算法误差为
4 改进划桨误差补偿算法
参考利用前一周期陀螺角增量信息改进圆锥误差补偿的算法,改进划桨算法的一般形式为
m-1为前一时刻补偿周期,G为补偿系数。
其中:
当仅考虑直流分量时:
此时改进算法的一般形式为:
将式(21)进行泰勒展开,可得到:
令式(13)与式(20)相等可得:
算法误差为
5 算法实例
传统算法,当n=4 时:
算法误差为
改进算法,当n=4 时:
算法误差为
根据圆锥误差与划桨误差的对偶关系,传统四子样算法和改进四子样算法所求系数与传统圆锥误差补偿四子样系数和文献[5]中的利用前一周期角增量圆锥误差四子样系数一致,从侧面验证了本文算法的正确性。
令B=0.2,C=0.5,T=0.1,根据式(24)和式(26)的结果,在四子样算法中不同振动频率Ω 下的取对数后算法误差如下图1所示。
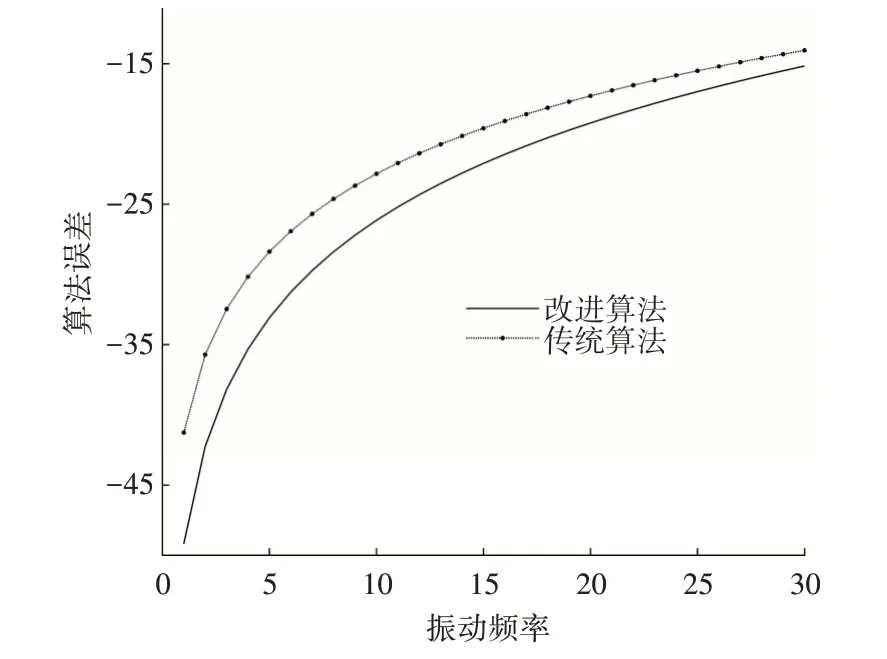
图1 算法误差与振动频率Ω 的关系
对上图进行分析,可以看出算法误差跟振动频率Ω 有极大的关联,在相同频率下,优化后的算法比传统划桨误差补偿算法精度更高。
6 结语
文中在经典的划桨运动条件下,先详细推导传统算法的划桨误差补偿系数,在此基础上推导出一种采用上一周期加速度计的速度增量和陀螺仪的角增量信息的优化划桨误差补偿算法,通过对传统四子样和改进四子样算法的对比分析,与文献[3]所利用前一周期的陀螺角增量改进圆锥误差补偿三子样算法系数相同,验证了算法的正确性,新算法具有更高的精度,有一定的应用价值。
