融合无人机和地基激光雷达点云数据估测单木结构参数
2024-01-19丁志文,邢艳秋,尹伯卿,郭振
丁志文,邢艳秋,尹伯卿,郭振





摘要:激光雷達(Light detection and ranging, LiDAR)作为一种主动遥感技术,能够通过发射激光能量并接收返回信息的方式获取森林空间结构信息,然而,单独使用时存在扫描盲区,无法获取完整的森林树木三维点云。为此,提出融合无人机和地基LiDAR点云估测单木结构参数的方法,采用地面特征和树木位置关系的配准方法实现点云融合,并在融合点云数据的基础上提出一种改进的K均值层次聚类分割算法完成单木分割,然后根据基于分割后的单木点云使用轴对齐包围盒算法以及最小二乘拟合圆法分别提取单木树高和胸径,最后通过生物量异速生长方程估测单木生物量。研究结果表明,蒙古栎样地的树高、胸径和单木生物量的决定系数(R2)分别为0.84、0.93和0.91,单木结构参数的均方根误差(RMSE)分别为0.75 m、0.96 cm和26.31 kg/株;樟子松样地的树高、胸径和单木生物量的R2分别为0.92、0.96和0.95,相应的均方根误差分别为0.43 m、1.06 cm和26.12 kg/株。融合无人机和地基LiDAR点云为快速完整地获取林木构型信息提供可靠的数据基础,为联合多源激光雷达技术深入林业应用提供有力的技术支撑。
关键词:无人机LiDAR;地基LiDAR;点云融合;单木分割;单木结构参数
中图分类号:S771.8文献标识码:A文章编号:1006-8023(2024)01-0142-10
Fusion of UAV and TLS LiDAR Point Cloud Data for Estimating Individual Tree Structure Parameters
DING Zhiwen, XING Yanqiu*, YIN Boqing, GUO Zhen
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China)
Abstract:Light detection and ranging (LiDAR), as an active remote sensing technology, is able to obtain information on the spatial structure of forests by emitting laser energy and receiving the return information, however, when used alone there is a scanning blind spot and a complete 3D point cloud of forest trees cannot be obtained. Based on this, this study proposes a method for estimating the structural parameters of a individual tree by fusing UAV and TLS LiDAR point clouds, and realizes point cloud fusion by using a registration method based on ground features and tree position relationships. Based on this, an improved K-means hierarchical clustering segmentation algorithm is proposed to complete the individual tree segmentation, and then based on the segmented individual tree point cloud, the axis-aligned bounding box algorithm and the least squares fitting circle method are used to extract the height of the individual tree and diameter at breast height respectively, and finally estimate the biomass of a individual tree through the biomass allometric growth equation. The research results show that the Coefficient of Deter mination (R2) of tree height, diameter at breast height and individual tree biomass of Quercus mongolica sample plots are 0.84, 0.93, 0.91 respectively, and the root mean square error(RMSE) of individual tree structure parameters are 0.75 m, 0.96 cm, 26.31 kg/plant respectively. The R2 of tree height, diameter at breast height and individual tree biomass in the Pinus sylvestris plot are 0.92, 0.96, and 0.95, respectively, and the corresponding root mean square errors are 0.43 m, 1.06 cm, and 26.12 kg/plant, respectively. The fusion of UAV and TLS LiDAR point cloud provides a reliable data basis for the rapid and complete acquisition of forest structure information, and provides a strong technical support for the deep forestry application of joint multi-source LiDAR technology.
Keywords:UAV LiDAR; TLS LiDAR; point cloud fusion; individual tree segmentation; individual tree structure parameters
0引言
森林由无数个单独的树木组成,因此树木的生物物理参数和树木之间的空间结构是森林资源调查的主要内容,也是森林生态研究的基础数据[1]。单木结构参数估算是指通过使用激光雷达(Light detection and ranging, LiDAR)等遥感技术来获取单木的各种参数,如树高、胸径和生物量等。随着激光雷达技术的飞速发展,无人机LiDAR和地基LiDAR已成为获取单木结构参数的主要手段之一。传统的单木结构参数统计以实测数据为基础,需要进行大量的实地调查,工作量大、周期长,且对植被造成一定的破坏[2-3]。激光雷达技术不仅可以弥补传统调查方法的不足,而且数据获取成本相对低廉,甚至可以在不适宜人工采集的林区进行数据采集,因此被广泛应用于单木结构参数的研究中[4-6]。
空中平台点云可直接提取的单木结构参数是树高,提取参数的前提在于树木点云的单木分割。因此,基于无人机点云提取单木结构参数的方法可分为基于冠层高度模型(Canopy Height Model,CHM)和基于点云2类。耿林等[7]利用可变大小的动态窗口在冠层高度模型上搜索局部最大值作为树冠顶点,并以树冠顶点作为标记采用标记控制分水岭算法勾勒树冠边界,并进一步提取树高等参数,结果表明,其树冠正确分割率达到88.5%,树高的提取精度达到90.34%。Peng等[8]利用点云重采样技术获取了不同密度的点云,并生成CHM用于提取树高,研究发现,随着点云密度的增加,CHM提取树高的精度也随之提高。基于点云分割相较于CHM,避免了因插值损失的精度,单木信息提取更加准确。霍朗宁等[9]提出了一种分层聚类的三维点云单木分割方法,结果表明,其单木树高的提取精度在90%以上。基于生物量异速生长方程可间接估算生物量,Gleason等[10]使用了支持向量回归、随机森林算法等多种方法建立了单木尺度和样地尺度上的生物量模型,结果表明,在单木水平上,不同方法得到的生物量模型效果差别不大。而在样地水平,采用支持向量回归方法的生物量模型效果最优。针对地面平台点云提取单木结构参数。郭沈凡等[11]利用格网化拟合圆柱法和最小二乘拟合圆法分别从地基点云中提取树高和胸径参数,并与实测值回归分析,其树高和胸径的决定系数分别为0.60和0.91。刘鲁霞等[12]对比了地基LiDAR多站与单站提取树高和胸径的精度,结果表明,不论是天然林样地还是人工林样地,多站点云提取的单木参数要比单站点云提取的参数更加接近实测值。李丹等[13]使用二维Hough变换和椭圆拟合方法来识别单棵树木并获取其单木位置和胸径,然后在此基础上进行圆柱体拟合来提取树高,该方法的单木识别精度达到了70%以上,且估测的树高和胸径与实测值具有较高的一致性。Dassot等[14]利用地基点云数据进行三维重建以拟合树木的几何形状,并进一步提取树木结构参数,通过材积转换法估算出单木生物量。陈世林等[15]利用优化的QSM算法从单木点云中重建三维结构模型,并用模型体积和特定树种的木材密度估算出单木生物量,与异速生长模型得出的单木生物量参考值进行对比,结果显示二者具有较好的一致性。
综上所述,无人机或地基LiDAR技术均可提取单木结构参数,但各自都存在局限性。无人机LiDAR可以提供高分辨率、高密度的树冠中上层信息,但通常无法获取树干、胸径等更加详细的林下信息。地基LiDAR可以提供详細的林下树木信息,包括树干、胸径等参数,但是只能获取有限高度范围内的树木信息。单一平台的LiDAR点云无法描绘完整森林树木信息。因此,为了估测更加完整的单木结构参数,需要将无人机LiDAR和地基LiDAR技术联合使用。本研究基于地面点云特征和树木位置关系实现了无人机和地基点云的深度融合,并在此基础上提取单木结构参数与实测数据进行对比分析,以探究融合点云数据在估测单木结构参数中的应用潜力。
1研究区概况与数据获取
1.1研究区概况
研究区位于哈尔滨城市林业示范基地(45°43′5″ N~45°43′15″ N,126°37′15″ E ~ 126°37′35″ E),占地面积约为44 hm2,海拔为136~140 m,属中温带大陆性季风气候。该林场主要为人工林,优势树种有樟子松(Pinus sylvestris var. mongolica)、黑皮油松(Pinus tabuliformis)、蒙古栎(Quercus mongolica)、水曲柳(Fraxinus mandshurica)和白桦林(Betula platyphylla)等。本研究选取蒙古栎和樟子松林作为研究对象,在其内部布置20 m×20 m的样地进行试验。
1.2激光雷达点云数据获取
1.2.1无人机激光雷达点云数据获取
无人机LiDAR点云数据采集于2021年4月,在数据采集时,天气晴朗少云,没有对激光雷达数据采集造成影响。本次飞行试验设备采用大疆M300 RTK四旋翼无人机搭载禅思L1激光雷达系统,数据采集时间持续2.5 h,扫描频率为160 Hz,无人机飞行高度约为50 m,飞行速度为4 m/s,激光雷达数据预处理使用大疆智图软件,三维重建后生成的点云平均点密度为504点/m2,采用CGCS2000坐标系和UTM投影方式。
1.2.2地基激光雷达点云数据获取
本次地基LiDAR点云数据采集试验于2022年5月进行,使用的设备是FARO Focus3D X330地面三维激光扫描仪。本次试验采用多站扫描模式,样地中心及样地角点附近架设测站,并在样地内均匀放置靶球,确保各站扫描的靶球有重合。本次采集的数据包括多站LiDAR点云和现场同步拍摄的光学影像,所有数据均同步储存在闪存卡中,使用FARO设备配套的处理软件SCENE进行多站点云配准及数据导出。
1.2.3地面实测数据获取
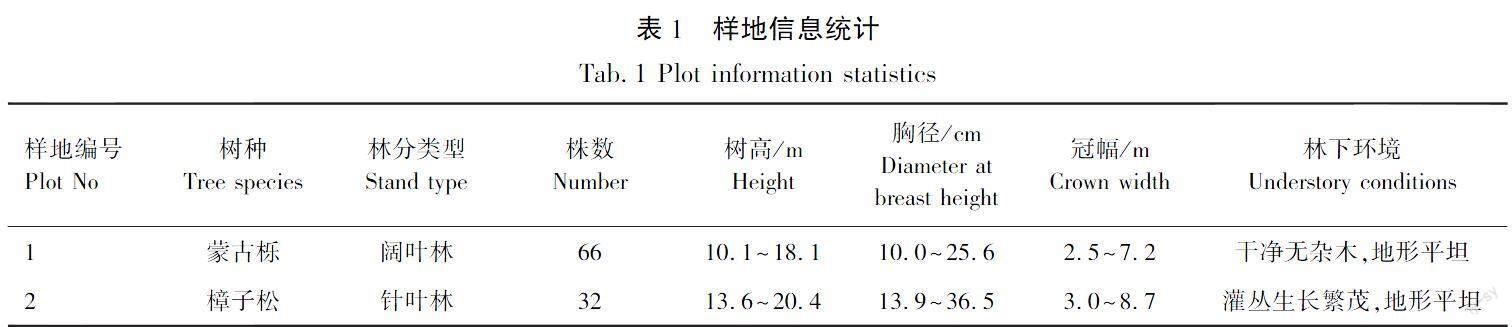
为了保证地面实测数据与采集的激光雷达点云数据尽可能保持时间的一致性,本研究于2022年5月在基地内进行人工实地调查,样地地面实测的信息包括树高、胸径、冠幅和树种等信息,使用Postex林地调查仪对样地内所有已编号单木进行定位,单木胸径使用围尺测量,树高信息采用超声波测高仪Vertex V测量,树木的冠幅信息通过皮尺测量,具体样地信息见表1。
2研究方法
本研究将无人机LiDAR点云和地基LiDAR点云融合,利用改进的K均值层次聚类分割算法分割单木点云,进而估测单木树高和胸径参数,并基于生物量异速生长方程估算单木生物量,最后将估算的单木结构参数与真实参考值进行线性回归分析,以验证基于融合点云数据估测单木结构参数的精度。
2.1数据预处理
激光雷达数据采集时由于样地环境、仪器设备以及异物遮挡等不可抗力因素影响,所获取的庞大点云数据中通常含有大量的噪声点。本研究利用基于统计学的离群点去噪算法[16]进行剔除,其核心思想是计算激光点云中各点到其邻域内所有点的平均距离,并以此建立高斯分布,确定其均值(μ)和标准差(σ),设定标准差倍数(Standard Deviation,std,式中记std),将邻域平均距离处于(μ-std·σ,μ+std·σ)以外的点标记离群点。
本研究使用改进的渐进加密三角网算法[17](Improved Progressive TIN Densification,IPTD)进行地面点分类。IPTD算法的基本步骤是使用形态学开运算从原始点云中获取潜在的地面种子点,并利用平移平面拟合法剔除其中的非地面点;然后对PTD算法进行两处优化。 一是基于地面种子点构造初始三角网时设置缓冲区,并沿其边界均匀放置模拟地面种子点,用以消除初始三角网的边缘效应并提高三角网的质量;二是在迭代向上加密三角网前先向下加密三角网,可以使初始三角网更接近于真实地形,从而提高地面点分类的效果。最后通过预设的角度和距离阈值,对潜在的地面种子点迭代判断,将满足条件的点加入三角网中完成地面点分类。
2.2点云融合
利用IPTD算法提取地面点云后,首先进行下采样并计算关键点的表面法线,然后提取地面点云的快速点特征直方图[18](Fast Point Feature Histograms,FPFH),基于无人机和地基地面点云中相似的FPFH特征使用随机采样一致性算法(Sample Consensus Initial Alignment,SAC-IA)[19]得到初始配准参数,旋转平移无人机点云完成初始配准。FPFH特征描述子的理论基础如下。
快速点特征直方图其核心思想是对每个查询点Aq,先計算其与邻域中所有点之间的简化点特征直方图(Simple Point Feature Histograms,SPFH),再以其邻域点Ak作为新的查询点计算其对应的SPFH,最后加权得到Aq的FPFH特征值。图1为查询点Aq的FPFH邻域影响图。以r为半径搜索Aq的邻域(图1中的虚线圆)内的k个邻域点形成星形图关系(图1中的红线),根据星形图中边的关系计算其SPFH,再从每个邻域点出发重新确定各自的邻域并计算其SPFH值,最后加权得到Aq的FPFH值。
无人机和地基点云大致重合后,利用树木位置关系进行精细配准。首先对初始配准后的无人机和地基点云进行高程归一化处理。通过提取两者相同高度处的树木位置点作为配准基元构建Delaunay三角网,并基于三角形的角度相似性原理[20]计算2个三角网中三角形对的相似度值,将得到的相似度值记录到M×N(M、N为2个三角网中的三角形个数)的矩阵中,该矩阵称为相似度矩阵。从矩阵中搜索相似度值大于0.85的三角形对作为同名三角形对,最后使用奇异值分解法得到变换矩阵,旋转平移无人机点云即可得到融合点云。
2.3单木分割
本研究基于无人机和地基融合点云提出了一种改进的K均值层次聚类分割算法进行单木分割,K-means算法[21]的基本流程是根据预设的k值,在数据集内随机选定k个数据样本作为初始聚类中心,然后计算剩余数据点与k个聚类中心点之间的欧式距离,按照就近原则将数据点分配到欧式距离最短的聚类中心所代表的聚类簇中。若首轮分配过程中存在未包含数据点的聚类簇,为避免初始聚类中心为孤立点或噪声点引起的聚类局部最优情况发生,需要生成新的聚类中心并重新分配数据点,直至每个簇中均包含数据点为止。在每轮分配完数据点后,均需计算平均误差。该平均误差采用误差平方和的形式表示并用来评价聚类性能,其计算公式如下。
E=∑ki=1∑p∈Xi‖p-mi‖2。(1)
式中:E为误差平方和准则函数;k为聚类簇的个数;Xi与mi分别代表了某轮分配完剩余数据点的第i个聚类簇及其对应的聚类中心;p为聚类簇Xi中的数据点。
当某轮更新聚类中心后,其对应误差平方和与上一轮的误差平方和相同或变化范围在预设阈值范围内,可判定聚类过程结束。若不满足条件,则继续迭代运算,直至满足条件退出循环或达到预设最大迭代次数。
K均值层次聚类分割算法的核心思想是按点云分层建立簇,形成一棵棵以簇为节点的树,并按自底向上的方向逐层进行凝聚聚类。由于K-means聚类算法需要预先确定初始聚类中心的数量,初始聚类中心的数量K决定单木分割后提取的样地树木的株数。不同的K会得到不同的聚类簇,使得聚类结果不稳定且容易陷入局部最优解的情况。为此,本研究将提取的树干种子点的数量作为初始K,树干种子点的位置作为初始聚类中心位置。首先利用直通滤波算法获取1.3 ~1.5 m处的树干点云,并投影到二维水平面上构成胸径点云切片,利用欧式聚类算法提取胸径点云并计算其中心位置坐标作为树干种子点。从距地面0.5 m的树干位置处以1 m为间隔进行竖直方向上的分层直至到达树冠顶点,然后将树干种子点作为底层点云的初始聚类中心,在每一层内使用K均值聚类算法时,将当前层的点云划分到离其最近的聚类中心后,重新计算当前点云层的聚类中心,再划分所有点云到离其最近的聚类中心上,一直迭代重复此过程,直到本层聚类中心位置不再变换,最后将当前层的最终聚类中心向上层传递并作为上一层的初始聚类中心进行聚类,直到树冠顶层点云聚类结束后,最后将属于同棵树的点云簇纵向融合完成单木分割。
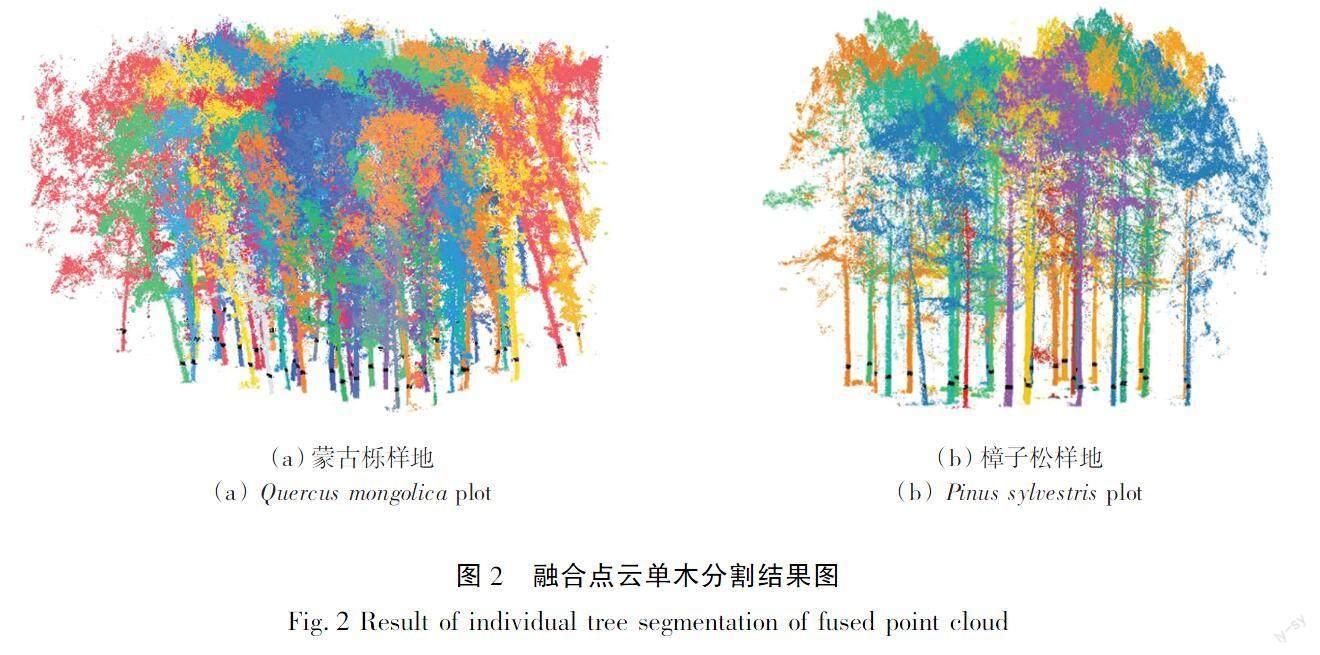
为避免点云过分割或欠分割现象对单木结构参数提取的影响,本研究在单木分割结果的基础上使用CloudCompare软件进行人工编辑和调整,剔除错误分割的点云,并手动分割欠分割的单木点云。另外,为提取单木胸径参数,本研究使用直通滤波算法保留了1.2 ~1.4 m高度范围内的树干点云。图2为融合点云的单木分割结果图,其中黑色部分(树干下面黑色小点)为0.2 m厚度的树干点云。
2.4单木结构参数估测方法
单木结构参数是指描述树木形态和结构的数值指标,可用于评估树木生长状态,常见的单木结构参数包括树高、胸径和单木生物量等。本研究通过估测单木点云中的上述参数,并与人工实地调查数据进行回归分析,以评估其精度。
1)单木树高
树高是指在单个树木的点云范围内,高程值最高点和最低点之间的垂直距离差,即该树木的高度。本研究利用轴对齐包围盒[22](Axis Aligned Bounding Box, AABB)对单个树木的点云进行建模,从而提取树高参数。包围盒是计算机图形学中一种常用的数据结构,可以用来求解离散点的最优包围空间。其基本思想是用体积稍大且特征简单的立方体或来近似代替复杂的三维模型。轴对齐包围盒的特点是包围盒的边与坐标轴平行,即6个面都是平行于坐标轴的矩形面。图3表示建模后的树木包围盒的示意图,将单木点云的轴对齐包围盒的高度视为树高。
2)胸径
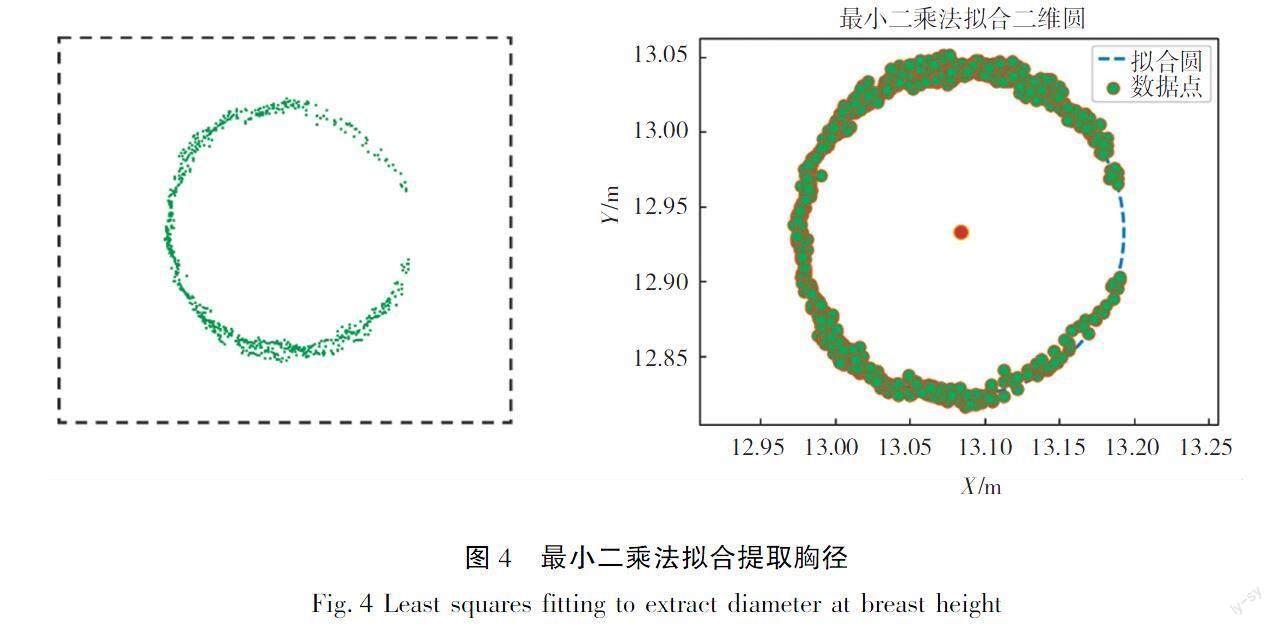
胸径是指林木位于距地面1.3 m处的树干直径。本研究采用最小二乘法[23]对胸径点云切片进行二维圆拟合并提取胸径值,如图4所示,该方法是一种基于最小二乘原理的圆拟合方法,通过最小化所有数据点到圆周距离之和的平方误差,找到最佳的圆心和半径,其原理如下。
树木胸径点云的几何形状近似二维圆,通过圆的方程可以近似表达如式(2)所示。
(x-a)2+(y-b)2=r2。(2)
式中:(x,y)为胸径点云中的点坐标;(a,b)和r分别为胸径拟合圆的圆心及半径,则胸径D=2r,cm。
3)单木生物量
单木生物量可通过直接测量和间接估算2种方式计算而来,但前者对林区树木具有破坏性且费时费力,后者一般利用生物量模型(相对生长模型,CAR)进行估算。其中以二元相对生长模型最为常用,如式(3)所示。
W=a(D2H)b。(3)
式中:W为整株或单木某器官的生物量,kg;D为胸径,cm;H为树高,m;a与树木密度相关的系数;b为与生长环境相关的系数。
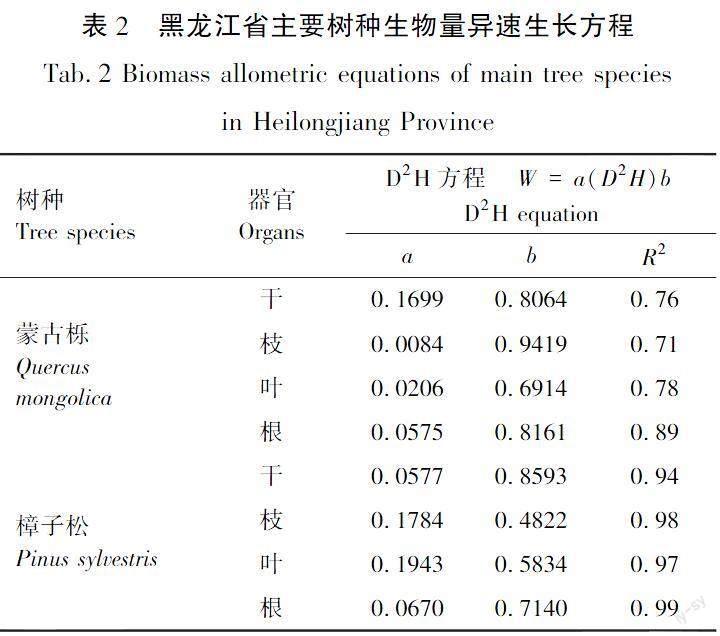
本研究使用黑龙江省相应树种的生物量异速生长方程来分别估算蒙古栎样地和樟子松样地的单木生物量,其中生物量依据《中国森林生态系统碳储量——生物量方程》[24]中的“黑龙江省主要优势树种生物量方程”,见表2,不同树种的单木生物量等于其树干、枝和叶等器官生物量的总和,利用树高、胸径参数结合不同器官的异速生长方程可分别计算出单株树木的干、枝、叶和根4部分的分器官生物量,并以分器官生物量累加之和作为单木生物量。
2.5模型评价指标
为了评价基于融合点云估测单木结构参数的精度,本研究基于单木点云提取树高、胸径参数,并借助生物量异速生长模型分别获取蒙古栎和樟子松样地的单木生物量估测值,并对估测值和实测值进行建模回归分析。在建模过程中,对模型进行评价是一项核心任务,通过模型检验来确定模型的拟合效果。本研究通过计算模型的决定系数(Coefficient of Determination,R2)和均方根误差(Root Mean Square Error, RMSE)对回归模型的拟合结果进行评价。
1)R2用来表示估测值和实测值之间的拟合程度,R2在取值范围在0~1,数值越接近1表示模型的拟合效果越好,计算如式(4)所示。
2)RMSE(式中记为RMSE)用于衡量模型预测值与真实值之间的偏差,反映了预测值与真实值之间的平均误差。RMSE越小,说明模型对数据的拟合程度越好;反之,RMSE越大,说明模型对数据的拟合程度越差。其计算如式(5)所示。
R2=1-∑ni=1(yi-yi^)2∑ni=1(yi-yi)2。(4)
RMSE=∑ni=1(yi-yi^)2n。(5)
式中:yi为实际观测值;yi^为模型估测值;yi为样本平均值;n为样本数。
3结果与分析
3.1树高提取精度
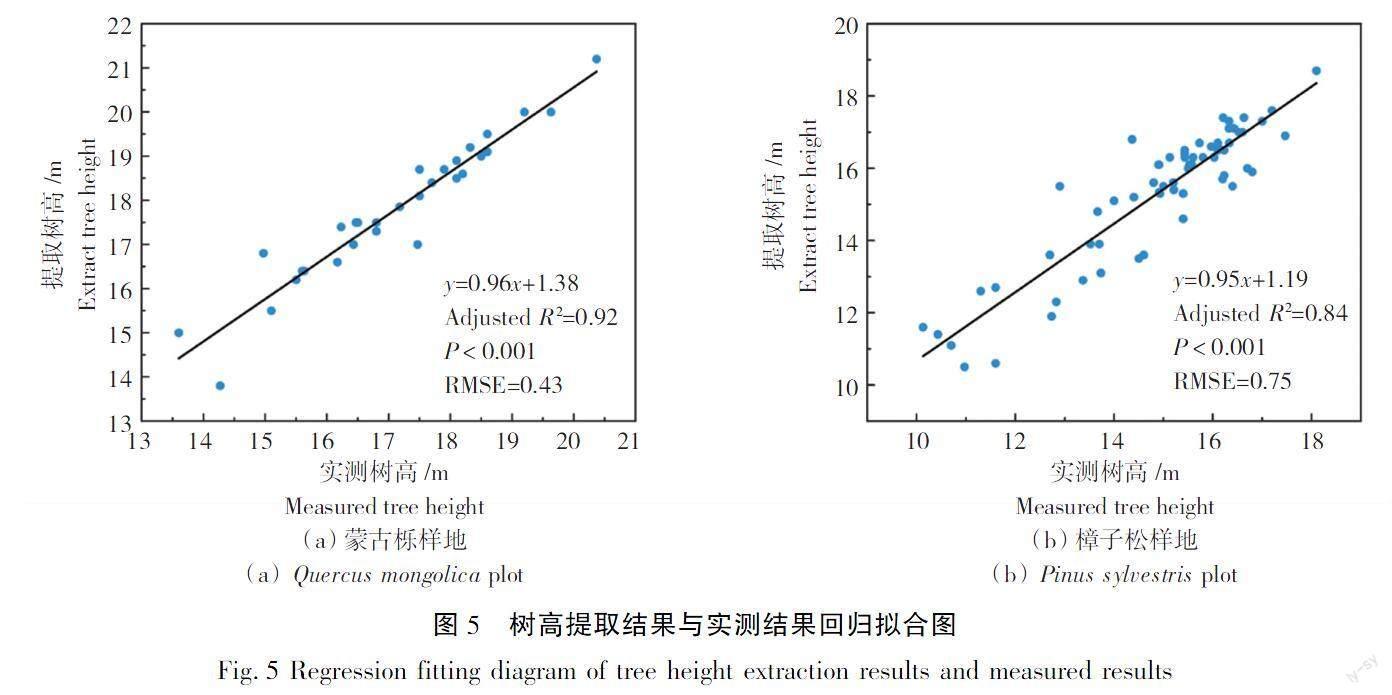
将树高提取值与实测值进行对比,结果如图5所示,樟子松样地和蒙古栎样地的树高提取值的R2分別为0.92和0.84,2块样地树高的R2均达到了0.80以上,表明融合点云树高提取值和实测值拟合精度较高。樟子松样地和蒙古栎样地的树高提取值的RMSE分别为0.43 m和0.75 m。蒙古栎样地树高提取值的RMSE略高,由于蒙古栎为阔叶树种,树冠枝叶的遮挡会造成人工测量树高时难以确定单木最高点,使得实测树高偏小。相比之下,通过单木点云估测树高时,采用的是几何量测的方式,计算树冠顶部最高的枝杈点到地面的垂直高度,因此能够更准确地估测树高。
3.2单木胸径
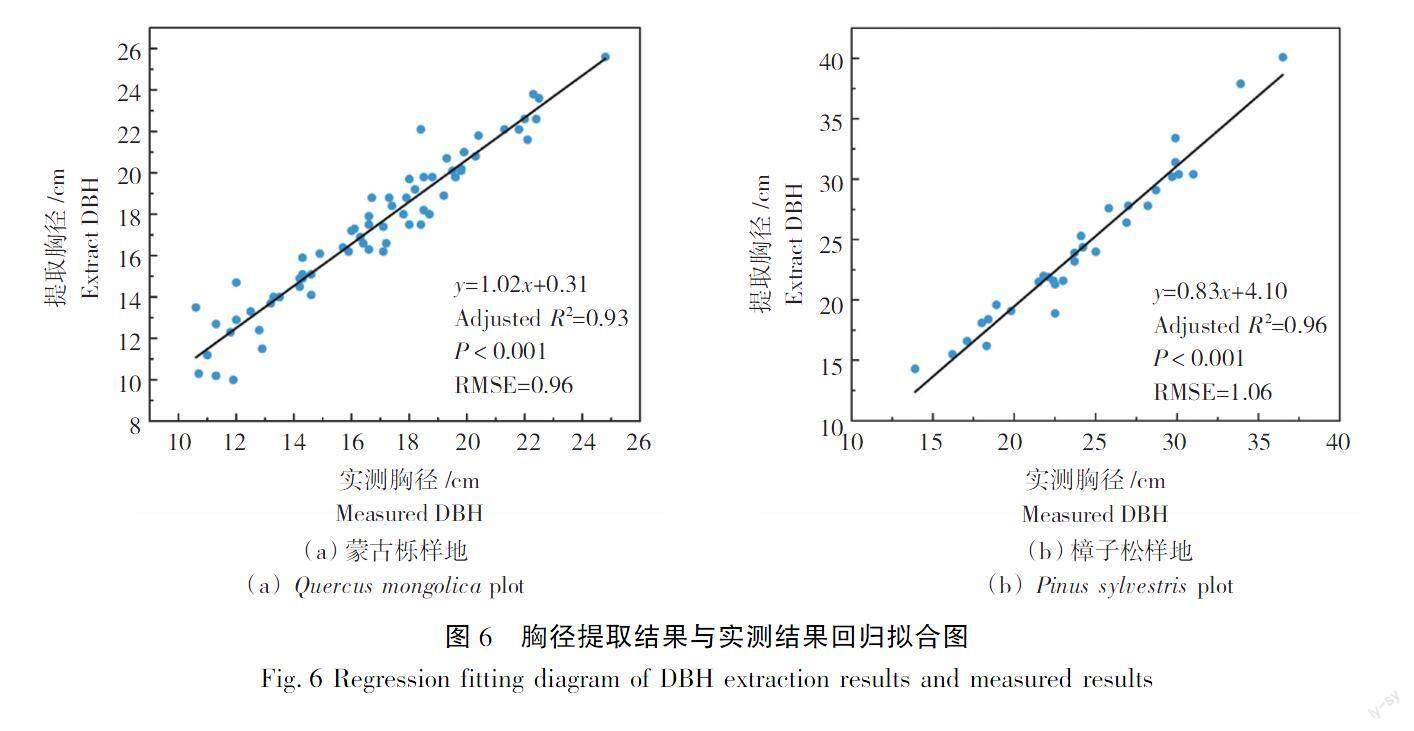
本研究使用最小二乘法从单木点云中提取胸径参数,并与胸径实测值进行回归分析,结果如图6所示。樟子松样地和蒙古栎样地的胸径提取值的R2分别为0.96和0.93,RMSE分别为1.06 cm和0.96 cm。2块样地胸径提取值的R2均达到了0.90以上,樟子松样地和蒙古栎样地的胸径提取值和实测值表现出良好的相关性。机载LiDAR点云数据通常无法直接估测胸径值,需要通过树高与胸径之间的方程进行间接估算,然而这种方法计算出的胸径误差较大,新兴的融合点云形态的出现弥补了机载LiDAR点云在估测单木胸径方面的劣势。
3.3单木生物量
基于单木点云提取的树高和胸径值,利用生物量异速生长方程估算单木生物量,将LiDAR点云估测的单木生物量与生物量参考值进行线性回归分析,结果如图7所示。2个样地的单木生物量估算值和参考值呈良好的线性关系,R2都在0.90以上,RMSE分别为26.12 kg/株和26.31 kg/株。蒙古栎样地的单木生物量R2为0.91,相较于樟子松样地略低。经分析,这是由于樟子松样地的单木分割精度优于蒙古栎样地,蒙古栎由于是阔叶树种,其过分割和欠分割数量要多于针叶林的樟子松样地。另一方面,参与单木生物量方程计算的变量为树高和胸径参数,尤其是树高值,樟子松样地树高估测值与实测值之间的误差要小于蒙古栎样地。从整体上看,基于融合点云估算的单木生物量与真实参考值之间的拟合精度较高,且RMSE较小,这表明融合无人机和地基LiDAR点云在估算单木生物量方面具有很大的应用潜力。
4討论
目前大多数研究多使用单一数据源点云进行单木结构参数提取,Dalla等[25]利用高密度无人机点云分别提取了树高和胸径参数,并与实测值进行回归分析,其决定系数分别为0.91和0.77,其均方根误差分别为1.51 m和3.46 cm。刘浩然等[26]利用无人机点云提取了树高参数,其R2为0.86,估测精度均低于本研究。地基LiDAR可获取完整的林下详细信息,但上层树冠信息容易受到中下层树冠枝叶的遮挡,从地基点云中估测出的树高通常较实测值更低[27]。Liu等[28]采用地基LiDAR技术获取了地形复杂区域的树木点云数据,并利用八叉树分割、连通性标记和霍夫变换等方法对树干进行识别和胸径提取,并根据树木自然生长方向提取了树高参数,试验结果表明,树木胸径的均方根误差在1.17~1.22 cm,树高的均方根误差在0.54~1.23 m。与本研究相比,胸径的估测精度相差不大,但树高估测精度低于本研究,表明通过融合点云提取树高的方法可有效提高单木结构参数的估测精度。此外,由于无人机LiDAR和地基LiDAR数据采集时间不同,可能会对单木结构参数的估测精度产生一定的影响。在未来的研究中,将选择在相近的时间范围内采集不同平台的点云数据,以减少LiDAR数据采集时间差异对估测精度的影响,从而提高单木结构参数估测的准确性。
在融合点云估测单木结构参数方面,张信杰等[29]基于机载和背包融合点云数据估测了桉树的单木因子,估测值与实测值对比结果表明,树高估测值的R2为0.90,RMSE为2.0 m;胸径估测值的R2为0.98,RMSE为0.87 cm。朱俊峰等[30]利用地基和无人机融合点云估测了单木树高、胸径参数,其单木树高的决定系数在0.73~0.89,均方根误差在1.96~3.47 m;单木胸径的决定系数在0.96~0.99,均方根误差在1.35~1.49 cm。与本研究试验结果相比,胸径的估测精度相差不大,但单木树高的估测精度低于本研究。究其原因,本研究点云融合时所使用的无人机点云密度较高,树冠上部点云信息完整,整体点云融合效果较好。
5结论
无人机和地基LiDAR采用不同的扫描方式来获取森林树木的空间结构信息,但单独使用时均无法获取完整的树木点云信息。本研究基于地面特征和树木位置关系,分两步由粗到细实现了无人机和地基点云的深度融合,并提出了一种改进的K均值层次聚类算法进行单木分割,从单木尺度上分析了新兴的融合点云形态对单木结构参数估测精度的影响,通过比较分析单木结构参数估测值和实测值,得出以下结论。
1)对于樟子松样地,其单木树高、胸径和单木生物量的决定系数R2分别为0.92、0.96和0.95,单木树高的均方根误差为0.43 m,胸径和单木生物量的均方根误差分别为1.06 cm和26.12 kg/株。
2)对于蒙古栎样地,其单木结构参数的决定系数R2分别为0.84、0.93和0.91,单木树高、胸径和单木生物量的均方根误差RMSE分别为0.75 m、0.96 cm和26.31 kg/株。
本研究基于融合点云估测的单木结构参数与真实参考值具有较高的拟合精度,证实了联合无人机和地基LiDAR技术可以实现对单木结构参数的准确提取。新兴的融合点云形态弥补了传统机载LiDAR点云在估测单木胸径以及地基点云在估测单木树高参数方面的劣势。相比于单一平台获取的点云,融合点云更加完整详细描述了单木尺度上的结构参数,有利于提高森林参数信息的反演精度。联合无人机和地基LiDAR技术可以更好地应用于森林资源调查和动态监测,将进一步促进森林资源的精确监测并成为林业遥感的有力工具。
【参考文献】
[1]郝红科.基于机载激光雷达的森林参数反演研究[D].杨凌:西北农林科技大学,2019.
HAO H K. Inversion of forest parameters using airborne LiDAR[D]. Yangling: Northwest A&F University, 2019.
[2]汤旭光,刘殿伟,王宗明,等.森林地上生物量遥感估算研究进展[J].生态学杂志,2012,31(5):1311-1318.
TANG X G, LIU D W, WANG Z M, et al. Estimation of forest aboveground biomass based on remote sensing data: A review[J]. Chinese Journal of Ecology, 2012, 31(5):1311-1318.
[3]全迎.无人机激光雷达提取长白落叶松单木树冠三维结构的研究[D].哈尔滨:东北林业大学,2019.
QUAN Y. Extraction of three-dimensional crown structure of Larix olgensis by UAV-borne LiDAR[D]. Harbin: Northeast Forestry University, 2019.
[4]尤号田,邢艳秋,王萌,等.小光斑激光雷达数据估测森林生物量研究进展[J].森林工程,2014,30(3):39-42.
YOU H T, XING Y Q, WANG M, et al. The progress on estimating forest biomass using small footprint LiDAR data[J]. Forest Engineering, 2014, 30(3): 39-42.
[5]李增元,刘清旺,庞勇.激光雷达森林参数反演研究进展[J].遥感学报,2016,20(5):1138-1150.
LI Z Y, LIU Q W, PANG Y. Review on forest parameters inversion using LiDAR[J]. Journal of Remote Sensing, 2016, 20(5): 1138-1150.
[6]蘇练.基于机载激光雷达数据的森林参数反演与程序设计[D].成都:电子科技大学,2017.
SU L. Forest parameter inversion and program design based on airborne Lidar data[D]. Chengdu: University of Electronic Science and Technology of China, 2017.
[7]耿林,李明泽,范文义,等.基于机载LiDAR的单木结构参数及林分有效冠的提取[J].林业科学,2018,54(7):62-72.
GENG L, LI M Z, FAN W Y, et al. Individual tree structure parameters and effective crown of the stand extraction base on airborn LiDAR data[J]. Scientia Silvae Sinicae, 2018, 54(7): 62-72.
[8]PENG X, ZHAO A, CHEN Y, et al. Tree height measurements in degraded tropical forests based on UAV-LiDAR data of different point cloud densities: A case study on Dacrydium pierrei in China[J]. Forests, 2021, 12(3): 1-17.
[9]霍朗宁,张晓丽.基于机载LiDAR点云多层聚类的单木信息提取及其精度评价[J].林业科学,2021,57(1):85-94.
HUO L N, ZHANG X L. Individual tree information extraction and accuracy evaluation based on airborne LiDAR point cloud by multilayer clustering method[J]. Scientia Silvae Sinicae, 2021, 57(1): 85-94.
[10]GLEASON C J, IM J. Forest biomass estimation from airborne LiDAR data using machine learning approaches[J]. Remote Sensing of Environment, 2012, 125: 80-91.
[11]郭沈凡,顾波,奚冠凡,等.地基LiDAR点云数据提取单木树高和胸径方法研究[J].现代测绘,2019(2):22-25.
GUO S F, GU B, XI G F. et al. Extracting of individual tree characteristics from ground based LiDAR point cloud[J]. Modern Surveying and Mapping, 2019(2): 22-25.
[12]刘鲁霞,庞勇,李增元.基于地基激光雷达的亚热带森林单木胸径与树高提取[J].林业科学,2016,52(2):26-37.
LIU L X, PANG Y, LI Z Y. Individual tree DBH and height estimation using terrestrial laser scanning(TLS) in a subtropical forest[J]. Scientia Silvae Sinicae, 2016, 52(2): 26-37.
[13]李丹,庞勇,岳彩荣,等.基于TLS数据的单木胸径和树高提取研究[J].北京林业大学学报,2012,34(4):79-86.
LI D, PANG Y, YUE C R, et al. extraction of individual tree DBH and height based on terrestrial laser scanner data[J]. Journal of Beijing Forestry University, 2012, 34(4):79-86.
[14]DASSOT M, BARBACCI A, COLIN A, et al. Tree architecture and biomass assessment from terrestrial LiDAR measurements: a case study for some beech trees (Fagus sylvatica)[J]. Silvilaser, Freiburg, 2010: 206-215.
[15]陳世林.激光雷达单木参数提取与生物量估算研究[D].北京:北京林业大学,2020.
CHEN S L. Research on extraction of single tree parameters and biomass estimation based on LiDAR[D]. Beijing: Beijing Forestry University, 2020.
[16]王子建,吴晶华.一种无人机激光雷达系统的点云去噪方法[J].新技术新工艺,2019(4):35-38.
WANG Z J, WU J H. Method of a point cloud denoising of drone LiDAR system[J]. New Technology & New Process, 2019(4):35-38.
[17]ZHAO X, GUO Q, SU Y, et al. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 117: 79-91.
[18]林榆森,李秋洁,陈婷.基于快速点特征直方图的树木点云配准[J].中国农机化学报,2022,43(2):155-162.
LIN Y S, LI Q J, CHEN T. Point cloud registration of tree based on FPFH[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(2):155-162.
[19]荆路,武斌,李先帅.基于SAC-IA和NDT融合的点云配准方法[J].大地测量与地球动力学,2021,41(4):378-381.
JING L, WU B, LI X S. Point cloud registration method based on SAC-IA and NDT fusion[J]. Journal of Geodesy and Geodynamics, 2021, 41(4):378-381.
[20]李赣华,周东祥,董黎,等.基于Delaunay三角化的有效角点匹配算法[J].信号处理,2007,23(5):695-698.
LI G H, ZHOU D X, DONG L, et al. Effective corner matching based on delaunay triangulation[J]. Journal of Signal Processing, 2007, 23(5): 695-698.
[21]SHI B Q, LIANG J, LIU Q. Adaptive simplification of point cloud using k-means clustering[J]. Computer-Aided Design, 2011, 43(8): 910-922.
[22]ULAIMAN H A, OTHMAN M A, ISMAIL M M, et al. Distance computation using axis aligned bounding box (AABB) parallel distribution of dynamic origin point[C]//2013 Annual International Conference on Emerging Research Areas and 2013 International Conference on Microelectronics, Communications and Renewable Energy. IEEE, 2013: 1-6.
[23]LIU C, XING Y, DUANMU J, et al. Evaluating different methods for estimating diameter at breast height from terrestrial laser scanning[J]. Remote Sensing, 2018, 10(4): 513.
[24]周国逸,尹光彩,唐旭利,等.中国森林生态系统碳储量——生物量方程[J].北京:科学出版社,2018.
ZHOU G Y, YIN G C, TANG X L, et al. Carbon storage in forest ecosystems in China - biomass equation[J]. Beijing: Science Press, 2018.
[25]DALLA CORTE A P, REX F E, ALMEIDA D R A, et al. Measuring individual tree diameter and height using GatorEye high-density UAV-Lidar in an integrated crop-livestock-forest system[J]. Remote Sensing, 2020, 12(5): 863.
[26]刘浩然,范伟伟,徐永胜,等.基于无人机激光雷达点云的单木生物量估测[J].中南林业科技大学学报,2021,41(8):92-99.
LIU H R, FAN W W, XU Y S, et al. Single tree biomass estimation based on UAV LiDAR point cloud[J]. Journal of Central South University of Forestry & Technology, 2021, 41(8): 92-99.
[27]HOPKINSON C, CHASMER L, YOUNG-POW C, et al. Assessing forest metrics with a ground-based scanning LiDAR[J]. Canadian Journal of Forest Research, 2004, 34(3): 573-583.
[28]LIU G, WANG J, DONG P, et al. Estimating individual tree height and diameter at breast height (DBH) from terrestrial laser scanning (TLS) data at plot level[J]. Forests, 2018, 9(7): 1-19.
[29]张信杰,郑焰锋,温坤剑,等.融合机载和背包激光雷达的桉树单木因子估测[J].林业资源管理,2022(6):131-137.
ZHANG X J, ZHEN Y F, WEN K J, et al. Estimation of single tree factor of eucalyptus by merging airborne and backpack LiDAR[J]. Forest Resources Management, 2022(6): 131-137.
[30]朱俊峰,刘清旺,崔希民,等.地基与无人机激光雷达结合提取单木参数[J].农业工程学报,2022,38(14):51-58.
ZHU J F, LIU Q W, CUI X M, et al. Extraction of individual tree parameters by combining terrestrial and UAV LiDAR[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(14):51-58.
