基于无人机低空遥感数据的时序动态生物量计算研究
2024-01-19张海浪,廉旭刚,王镭学,高宇璐,石力帆,李宇
张海浪,廉旭刚,王镭学,高宇璐,石力帆,李宇








摘要:為解决林分自然生长和人工剪伐修枝引起的单木特征参数变化所造成的生物量变化问题,采用地基激光雷达数据(TLS)和无人机激光雷达数据(UAV-LS)为数据源,通过单木分割的方法,以地基激光雷达数据提供的高精度数字高程模型为基础,提升无人机激光雷达数据的单木召回率;基于无人机激光雷达数据进行单木树高的提取及一致性评定,通过优化的生物量模型,利用树高参数计算2022年和2023年各树种单木生物量。结果表明,联合地面激光雷达数据可以将无人机激光雷达数据的单木召回率从60.0%提升至73.1%;对2022年、2023年树高参数提取得到近两年树木自然生长、修剪状况;对树高一致性评定得到一致性相关系数(Concordance correlation coefficient, CCC)为0.98,均方根误差(RMSE)为1.12 m;对生物量计算得到近两年各树种单木生物量、林分生物量,2022年、2023年单位面积生物量分别为77.39 、81.56 t/hm2。研究证实在研究区通过无人机低空遥感数据获取树高时序动态计算各树种单木生物量可行,可以掌握林分自然生长和人工修剪引起的生物量变化。
关键词:TLS;UAV-LS;树高;生物量;无人机
中图分类号:S771.8文献标识码:A文章编号:1006-8023(2024)01-0017-09
Research on Time-series Dynamic Biomass Calculation Based on UAV Low-altitude Remote Sensing Data
ZHANG Hailang, LIAN Xugang*, WANG Leixue, GAO Yulu, SHI Lifan, LI Yu
(College of Mining Engineering, Taiyuan University of Technology, Taiyuan 030024, China)
Abstract:In order to solve the problem of biomass change caused by the change of the characteristic parameters of single wood caused by the natural growth of forest stand and the pruning of artificial shears, terrestrial laser scanning (TLS) and aerial vehicle laser scanning (UAV-LS) data were taken as data sources, through the single-wood segmentation method, the single-wood recall rate of UAV-LS data based on the high-precision digital elevation model provided by terrestrial laser scanning was improved. Based on the UAV-LS data, the extraction and consistency evaluation of individual tree height were carried out. The optimized biomass model was used to calculate the individual tree biomass of each tree species in 2022 and 2023 using tree height parameters. The results showed that the combined TLS data can increase the recall rate of UAV-LS data from 60.0% to 73.1%. The tree height parameters in 2022 and 2023 were extracted to obtain the natural growth and pruning status of trees in the past two years. The consistency correlation coefficient (Concordance correlation coefficient, CCC) of tree height consistency evaluation was 0.98 and the root mean square error (RMSE) was 1.12 m. And the biomass of single wood and stand biomass in the past two years was calculated and the stand biomass was 77.39 and 81.56 t/hm2 per unit area in 2022 and 2023, respectively. This study confirmed that it was feasible to obtain tree height time series dynamic calculation of individual tree biomass of each tree species by using UAV low-altitude remote sensing data in the research area and can grasp the biomass changes caused by natural growth and artificial pruning of forest stands.
Keywords:TLS; UAV-LS; tree height; biomass; unmanned aerial vehicle (UAV)
0引言
森林生物量在减少温室气体(GHG)排放方面至关重要,及时准确地估算森林生物量,对森林生态系统管理和气候决策支持具有重要意义[1-2]。树高、胸径参数是生物量计算的关键指标,也是评价森林生长状况的重要参数,森林空间结构受树木自然生长、人工剪伐修枝的影响,单木参数会产生一定的变化。快速、准确地获取林木信息,及时监测森林资源的动态变化是林业部门的主要任务之一,但是人工调查单木树高、胸径的时间和人力成本较高,效率较低,不能满足林业精准化、精细化、时序监测森林生物量的需求[3-4]。
地面激光雷达(TLS)依靠其高扫描精度和扫描密度,可用于单木树高及胸径测量,能够节省人力,提高工作效率。根据地面激光点云数据通过最小二乘圆拟合算法得到单木胸径(DBH),在获取到DBH后根据种子点的三维坐标搜索DBH半径范围内的点或最近点作为初始种子点簇进行单木分割,能够提高单木召回率,可以保证研究区单木个数,同时对高密度点云采用自适应不规则三角网滤波算法(ATIN)对其进行点云滤波、反距离加权作插值处理可以得到高精度数字高程模型(Digital Elevation Model,DEM)。但对冠幅较大的单木采集数据时不易获取树木冠幅上方信息,不能很好地获取树高参数[5-6]。机载激光雷达数据可获取较高精度的树高参数信息,但获取数据成本较高,很难进行高频访问[7-8]。
随着卫星导航系统(GNSS)、惯性导航系统的小型化、低成本,无人机搭载激光雷达将激光测距技术、计算机技术、惯性测量单元和GNSS差分定位技术集成于一体,非常适合对林区进行时序化动态监测,成为近些年发展最为迅速的低空遥感技术[9-12]。激光雷达不受云层等天气情况影响,可以快速获得林分垂直方向结构参数,将数字地表模型(Digital Surface Model,DSM)数据减去数字地形模型(Digital Terrain Models,DTM)数据获取冠层高度模型(Canopy Height Model,CHM),通過冠层高度模型对树木进行单木分割,取得单木树高参数,在计算森林生物量方面获得很大优势。但是对于复杂林分中冠层较大的树木,冠幅的遮挡造成其下方树木点云密度稀少,激光雷达无法准确得到地面信息,森林结构信息具有较高的不确定性,造成冠幅下方树木漏检情况;同时也可能将一个较大的冠幅多分为几个冠幅,造成冠幅多检情况[13-14]。
为探究无人机低空遥感数据在便捷、高效、低成本和时序化估算森林生物量方面的可行性,本研究根据TLS数据提供的研究区单木召回率和高精度DEM,对2022年和2023年无人机激光雷达数据提取的树木高度参数进行生长变化评估及一致性评定,基于优化的生物量模型利用树高参数计算研究区的各树种单木生物量,了解各树种的自然生长变化及人工修剪情况,为今后无人机低空遥感数据高频时序化监测森林生物量提供理论支撑。
1材料与方法
1.1研究区概况
1.1.1研究区位置
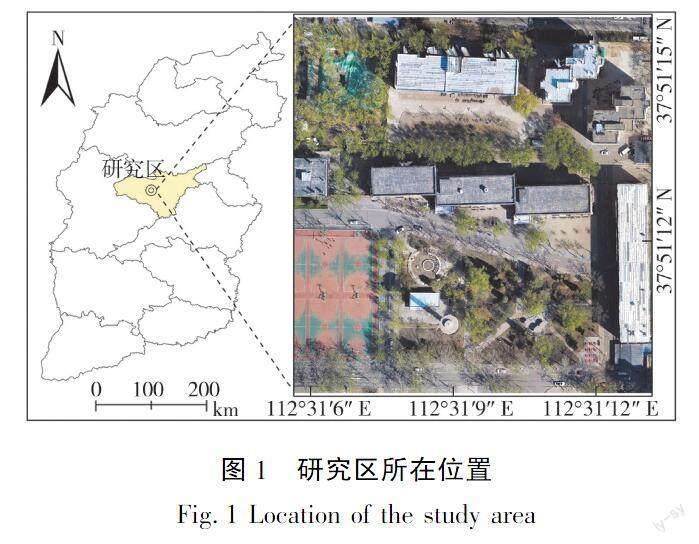
以太原理工大学虎峪校区一绿地作为研究区,地理坐标为37°27′~38°25′N, 111°30′~113°09′E。研究区最高点海拔为799 m,最低点海拔为786 m,平均海拔为792 m,占地面积为0.7 hm2。研究区位置如图1所示。
1.1.2样地数据
区域内柳树共16棵,12棵分布在场地外围,4棵分布在研究区中央;杨树共13棵,均分布在场地南部外围,分布比较松散;丁香树共67棵,集中分布在研究区西北角、东南角,白皮松15棵,分布在研究区内道路旁,位于场地中央柳树下方,圆柏共31棵,零散分布在研究区内;槐树21棵,均匀分布在场地北部和东部外围,分布比较松散。样地分布如图2所示。
1.2激光雷达遥感数据采集
1.2.1地面激光扫描(Terrestrial Laser Scanning,TLS)数据
2022年4月使用全站扫描仪采集地面点云数据,距离扫描精度0.6 mm,扫描速率为30 m内每秒1 000点。共布设21个测站,为保证不同测站之间扫描结果分辨率一致,在各测站开始扫描之前均设置相同的点云密度参数。设置扫描平距为15 m时,获得的点云水平间隔10 cm,垂直间隔10 cm,扫描速度1 000 点/s,估算点数为4万左右,耗时25 min。
1.2.2无人机低空(Light Detection And Ranging,LIDAR)遥感数据
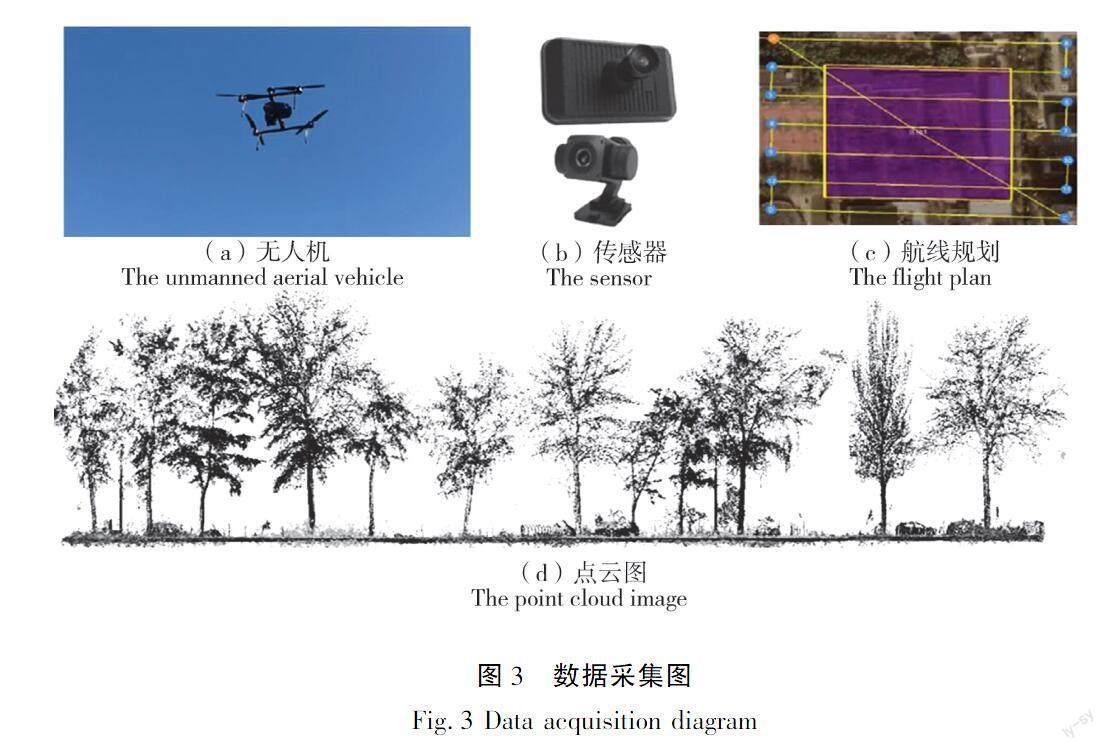
2022年4月及2023年4月使用飞马无人机D-LIDAR激光雷达采集了UAV-LS数据。飞机飞行高度为128 m,飞行速度为13.5 m/s。平均点密度286 点/m2,获得了多达3次回波,回波强度为8 bits。激光脉冲波长和频率为905 nm和240 kHz。收集的数据采用飞马无人机的UAV-managing软件进行处理,包括全球卫星导航系统(GlobalNavigationSatelliteSystem,GNSS)及惯性测量单元(Inertial Measurement Unit,IMU)处理。数据采集如图3所示。
1.3无人机激光雷达数据处理
原始激光雷达点云数据需要进行GPS格式转换、网络差分解算、紧耦合差分解算和精度评定,完成点云轨迹解算。轨迹解算后的点云数据进行预处理,包括点云解算、质量检查(如分层,需要进行航带平差)、去冗余、坐标转换和精度检查,得到激光雷达标准点云。
1.4 研究方法与技术路线
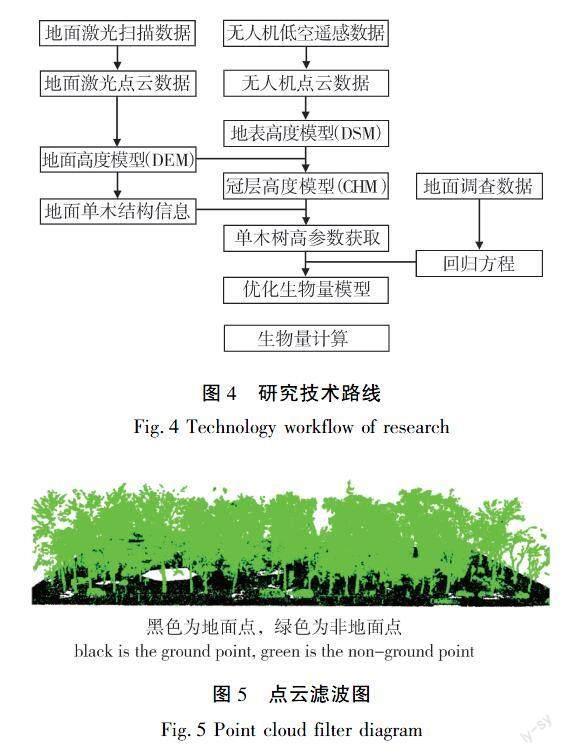
本研究以地基激光雷达数据和无人机激光雷达数据为数据源,通过单木分割的方法,以地基激光雷达数据提供的高精度数字高程模型为基础,提升无人机激光雷达数据的单木召回率;基于无人机激光雷达数据进行单木树高的提取及一致性评定,通过优化的生物量模型,利用树高参数计算2022年和2023年各树种单木生物量。研究技术路线如图4所示。
1.4.1点云滤波
基于地面激光雷达扫描生成的研究区原始点云数据分为地面点云和非地面点云,为了准确获得DEM,需要进行地面点分类。本研究采用改进的渐进加密三角网滤波算法(Improved Progressive TIN Densification, IPTD)分类地面点,先通过种子点生成一个稀疏的三角网,然后通过迭代处理逐层加密,直到所有地面点分类结束[15]。点云滤波如图5所示。
1.4.2地面高程模型的生成及精度评定
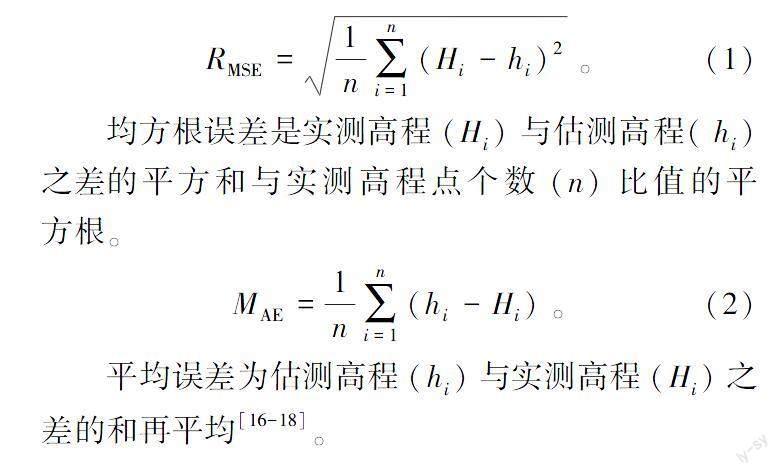
对分类后的地面点云数据进行处理,采用反距离加权插值得到DEM。为消除地形起伏对点云数据高程值的影响,将原始点云数据投影到DEM上,得到与其相对应的DEM高程值,再将每个点云的高程值减去对应DEM地面高程值,得到地面点归一化点云数据[6]。将分类后的地面点构造三角网并进行插值,获取到实测单木在DEM对应位置方向的高程值(h),与导入实测单木的高程值(H)作差,得到实测单木点与地面点的高程差值(Z)。计算均方根误差(RMSE,式中记为RMSE)及平均误差(MAE,式中记为MAE)来评估DEM的精度,公式为
RMSE=1n∑ni=1(Hi-hi)2 。 (1)
均方根误差是实测高程(Hi)与估测高程(hi)之差的平方和与实测高程点个数(n)比值的平方根。
MAE=1n∑ni=1(hi-Hi)。(2)
平均误差为估测高程(hi)与实测高程(Hi)之差的和再平均[16-18]。
1.4.3CHM模型生成
对无人机低空遥感数据获取的标准点云数据进行去噪、地面点分类、克里金插值得到精确数字地表模型(DSM)。无人机低空遥感点云数据和全站扫描仪点云数据都使用的是千寻网络提供CGCS2000坐标系统,两者有相同的地理参考、相同的坐标系,将数字地表模型(DSM)与地面激光扫描得到的数字高程模型(DEM)作差值,获得冠层高度模型(CHM)。CHM模型生成完毕之后会存在冠层间隙及无效值这样的黑色像素点,使得树冠区域不完整,需将无效值进行填充,并对填充后的CHM进行高斯滤波处理,来解决过分割或欠分割现象。
1.4.4单木位置探测与分割及精度评定
地面激光点云经过地面归一化后根据最小二乘圆拟合算法得到DBH,在获取到DBH后根据单木位置探测的种子点三维坐标搜索DBH半径范围内的点或最近的点作为初始的种子点簇进行单木分割[19],可以获取到单木位置及胸径参数;无人机点云数据根据冠层高度模型采用局部最大值算法提取单木顶点位置并作为种子点,该算法将树冠最高点作为单木位置,通过移动窗口逐步对栅格数据进行搜索,并判断搜索窗口的中心点是否为局部极大值,若为局部极大值,则将此像素标记为单木顶点。将种子点通过分水岭分割算法进行单木分割,把CHM的高点处当作山峰,低点处为山谷,用水填充,在水汇合的地方建立屏障,屏障即为分割的结果。
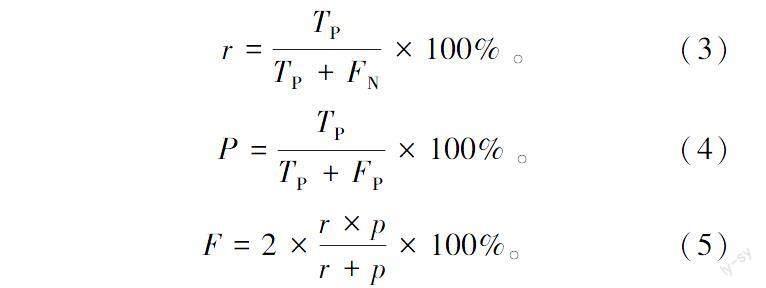
以实测单木作为参考与提取的单木位置进行匹配。若实测单木位置附近范围内存在唯一单木为正检(True Positive, TP,式中记为TP);不存在单木为漏检(False Negative, FN,式中记为FN);存在多個单木则为错检(False Positive, FP,式中记为FP)。单木检测结果使用召回率 (r)、准确率 (p)和F测度(F-score)进行评价,其公式为[16]
r=TPTP+FN×100%。 (3)
P=TPTP+FP×100%。(4)
F=2×r×pr+p×100%。(5)
式中: r为召回率,表示正检株数占实测株数额比例; p为准确类,表示正检株数与检测的株数之比;F为测度,是对召回率r和准确率p的综合描述。
1.4.5生物量模型优化
生物量模型是林木生物量估算的经典方法,通过将生物量模型与胸径、树高等单木参数建立经验方程式来估算生物量。同种类型的生物量模型有较高的相似性,区域差异很小,对同种类型的林木可以采用相同的生物量模型。研究区蓄积量计算采用了单木二元材积模型蓄积量(V)
V=aDbHc。 (6)
式中:a、b、c为模型参数;D为胸径;H为树高。
生物量计算中研究区采用了乔木类生物量模型,地上部分总生物(WT)
WT=a(D2H)b。 (7)
地下部分生物量(WR)
WR=WT/3.85。(8)
生物量(W)
W=WT+WR。(9)
研究者将实地调查的树高、胸径值使用回归方程建立树高与胸径的模型,通过模型利用树高推测胸径值。各树种回归方程公式见表1。
D的单位为cm;H的单位为m。利用上述回归方程,将蓄积量与生物量模型的胸径参数用树高参数表达,得到优化后的各树种蓄积量、生物量模型。见表2。
2结果
2.1DEM精度评定
无人机低空遥感数据对于复杂林分中冠层较大的树木,冠幅的遮挡造成其下方树木点云密度稀少,激光雷达无法准确得到地面信息,森林结构信息具有较高的不确定性,需要准确的地面高程信息提升获取的树高信息准确度。根据地面激光点云数据获得的DEM精度评价表见表3。
TLS得到的高精度的DEM均方根误差为7.3 cm,既可为无人机低空遥感数据的树高参数获取提供很好的保障,又可作为长期时序观测的数据分析基础。
2.2单木检测精度评价
研究区实测单木160株,以实测单木作为参考与提取的单木位置进行匹配。据2022年地面激光扫描(TLS)数据提供的研究区单木高召回率可以提升无人机激光雷达数据(UAV-LS)的单木召回率,单木检测见表4。
根据无人机点云的单木召回率,对于研究区内树冠较大的树木,由于冠幅的遮挡造成冠幅下方树木点云密度稀少,会存在漏检冠幅下方树木现象。根据地基点云的单木召回率往往会高于基于无人机点云的单木召回率,其与地基融合无人机点云的单木召回率一致,说明地基点云可以准确识别出单木树干,可以保证研究区的单木个数,利用TLS提供的单木召回率可以很大程度提升低空遥感数据的单木召回率,将地面激光扫描运用到研究区去获取DEM及单木胸径参数为后续生物量时序计算提供数据分析基础及技术参考。
2.3树高生长变化评估及一致性评定
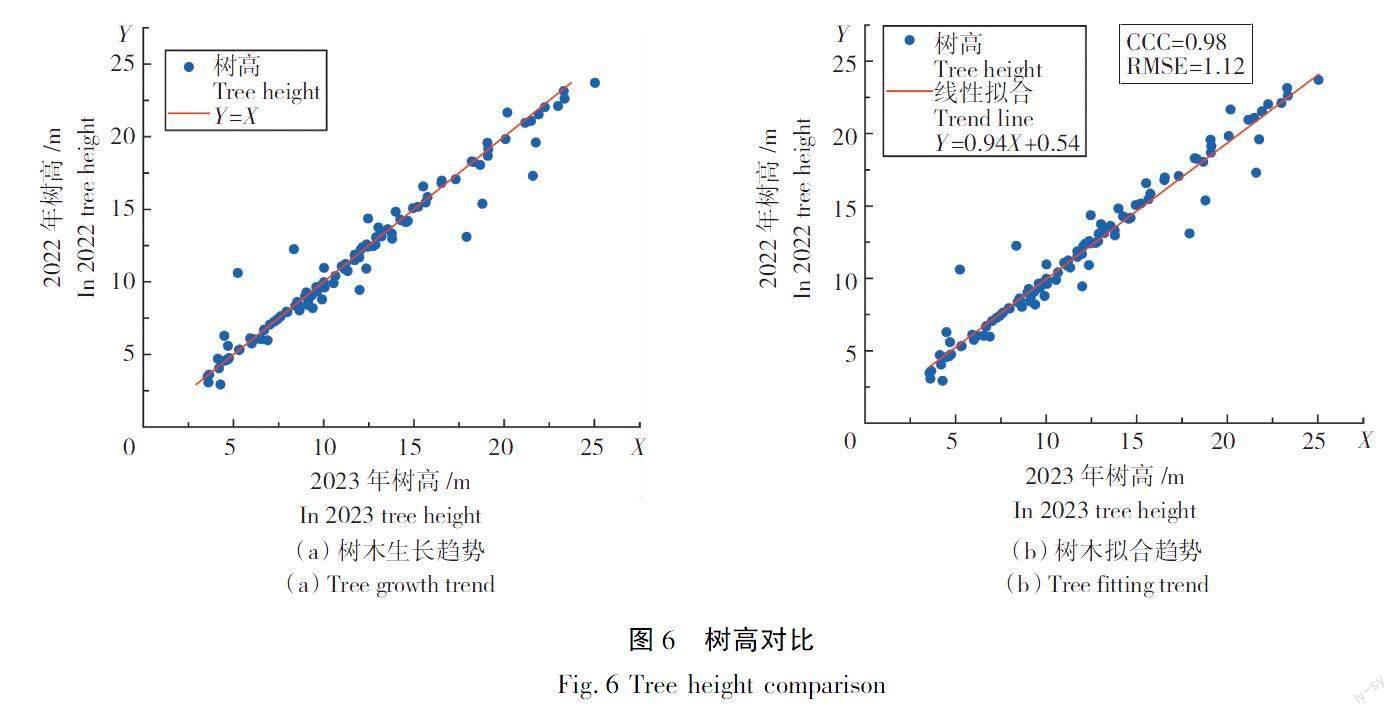
本研究将激光雷達数据2022年和2023年的树高进行了比较,图6评估了2022年—2023年树木生长变化,X>Y表明了树木的自然生长,X<Y表明园丁对树木进行了修剪,修剪的基本是位于校园道路旁的槐树,为防止雷雨天气树枝受风力的影响刮倒砸伤行人,园丁冬季会对道路旁的槐树进行修剪。同时为了评估激光雷达点云数据近两年所获取的树高之间关系,使用了一致性相关系数(Concordance correlation coefficient, CCC)和 RMSE,CCC(式中记为CCC)相对于Pearson相关系数的优势在于其能检测度量值的偏移和增益偏移[20]。计算公式为
CCC=2ρσ12σ21+σ22+(μ1-μ2)2(10)
式中:ρ为2个度量值的相关系数;σ2和μ分别是相应的方差和均值。
RMSE用于量化建模体积偏差的大小和平均符号差(MSD)以评估偏差[20]。根据2022年和2023年激光雷达数据获取的树高进行对比,很好地反映出了两年内树木的生长程度,大部分树木呈一个缓慢生长的态势。树高的一致性相关系数(CCC)为0.98,均方根误差(RMSE)为1.12 m,树高一致性很好。
2.4生物量计算
根据优化生物量模型的无人机低空遥感数据生物量时序计算,可以在很大程度上反映研究区由于林分自然生长和人工剪伐、修枝引起的单木特征参数变化所造成的生物量变化问题。研究区生物量计算见表5。
地面激光扫描可以提供高精度的DEM及单木召回率,利用优化后的生物量模型及两期研究区无人机低空遥感数据对研究区近两年各树种生物量进行计算,2022年研究区单位面积生物量为77.39 t/hm2,2023年研究区单位面积生物量为81.56 t/hm2,柳树、杨树、白皮松、丁香树和圆柏2023年相比2022年生物量都略有增长,反映出研究区由于自然生长所造成的生物量变化;由于园丁对于槐树的修剪,造成槐树2022年的生物量比2023年的生物量略多,反映出研究区由于修剪所造成的生物量变化。研究结果表明将无人机低空遥感数据运用于林业生物量时序估算具有很好的可行性。
3讨论
1)激光雷达扫描数据采集过程中由于飞机、飞鸟等空中物体或者大气悬浮物造成的高空噪点与地表有较大的高差,容易去除;由激光回波多路径效应产生的低空噪点距离地表较近,容易被误分为地面点,对滤波结果影响较大。无人机采集数据时,在植被密集的地方,激光脉冲难以穿透冠层到达地面,无法获取林下数据,没有相对连续的地面数据,会造成植被密集地方地面点分类误差较大,通过借助地面激光雷达扫描数据可以获取到植被密集地方的林下数据,提高地面点分类。在植被落叶季节,树冠层对脉冲到达地面百分比影响较小,地面点密度大大增加,减小了植被对DEM精度的影响,应尽量选择植被落叶后进行无人机激光扫描数据采集。地面点为分布不均匀的三维离散点,需要对其进行插值生成连续变化的(Digital Elevation Model, DEM),插值方法不同生成DEM的精度会略有不同,根据研究区获取数据点云密度大,分布均匀的特性选取反距离加权插值。
2)试验中在进行种子点提取时,依赖手动设置搜索窗口宽度以进行局部最大值过滤,由于柳树及杨树的树冠较大,每个树枝上都可能包含一个以上的局部最大值,可能会将一棵树识别为几棵树,造成多分现象使得单木提取后的树木比实际树木要多;同时由于CHM只反映树木冠层的表层高度,基于CHM数据的分割方法对林木冠层下的小树识别能力较弱,直接影响树木株数及树高参数的估算精度,需要借助计算机算法与人工交互编辑种子点并基于编辑后的种子点对CHM进行分割,提高单木分割的准确性,还需要进一步研究基于CHM数据利用分水岭算法进行单木分割。
3)实时、准确地对森林结构参数进行动态化监测,从而了解森林健康状况、探究资源储备和制定管理措施的数据基础和关键环节,基于单木分割的监测方法主要从点云数据中分割出单木,然后在单木尺度上监测单棵树木的参数变化,其监测结果很大程度上受单木分割精度影响,分割精度与激光点云数据的密度、质量密不可分,错分和漏分现象在单木分割中不可避免,研究区丁香树和圆柏由于分布在树高较高、小枝条较多的柳树附近,无人机在进行数据采集时,被其所遮挡,造成丁香树及圆柏的点云密度相对较低。点云密度是影响单木生物量参数准确获取的关键因素,通过改善飞行路径、多角度飞行和选用合适的飞行高度来提升点云密度,高效、精准获取单木参数[21]。
4结论
本研究利用TLS点云数据获取高精度DEM及单木召回率,通过无人机低空遥感数据获取树高参数,并基于优化的生物量模型对研究区单木生物量进行长期有序动态计算,研究结果如下。
1)无人机低空遥感数据对冠幅下方的单木召回率较低,根据TLS提供的单木召回率可以很大程度地提升单木召回率,联合地面激光雷达数据可以将无人机激光雷达数据的单木召回率从60.0%提升至73.1%。将地面激光扫描数据运用到研究区提取单木位置等参数,可为后续基于无人机低空遥感的生物量监测提供技术参考。
2)无人机低空遥感生成的点云数据在复杂林分处无法提供准确的地面信息,TLS采集数据可以获取到准确的地面信息,DEM精度评定为:均方根误差为7.3 cm,利用TLS提供的高精度DEM,无人机低空遥感可以获得准确的单木高度,树高一致性精度评定中树高的一致性相关系数(CCC)为0.98,均方根误差(RMSE)为1.12 m,高精度DEM可作为长期时序观测的数据分析基础。
3)运用优化的生物量模型及无人机低空遥感数据可以根据获取的单木树高计算出单木生物量,2022年蓄积量为48.27 m3,单位面积生物量为77.39 t/hm2,2023年蓄积量为50.85 m3,单位面积生物量为81.56 t/hm2。反映出研究区由于树木生长及修剪造成的生物量变化,无人机低空遥感的介入为森林管理提供低成本、高分辨率和持续更新的林业信息,使得时序动态生物量计算可行。
【参考文献】
[1]ROBBIE H, WERNER K. Low tree-growth elasticity of forest biomass indicated by an individual-based model[J]. Forests, 2018, 9(1): 21.
[2]ZENG W S, FU L Y, XU M, et al. Developing individual tree-based models for estimating aboveground biomass of five key coniferous species in China[J]. Journal of Forestry Research, 2018, 29: 1251-1261.
[3]MOE K T, OWARI T, FURUYA N, et al. Comparing individual tree height information derived from field surveys, LiDAR and UAV-DAP for high-value timber species in northern Japan[J]. Forests, 2020, 11: 223.
[4]TORRESAN C, BERTON A, CAROTENUTO F, et al. Forestry applications of UAVs in Europe: A review[J]. International Journal of Remote Sensing, 2017, 38: 2427-2447.
[5]郭庆华,刘瑾,陶胜利,等.激光雷达在森林生态系统监测模拟中的应用现状与展望[J].科学通报,2014,59(6):459-478.
GUO Q H, LIU J, TAO S L, et al. Perspectives and prospects of LiDAR in forest ecosystem monitoring and modeling[J]. Chinese Science Bulletin, 2014, 59(6): 459-478.
[6]廉旭刚,韩雨,刘晓宇,等.无人机低空遥感矿山地质灾害监测研究进展及发展趋势[J].金属矿山,2023(1):17-29.
LIAN X G, HAN Y, LIU X Y, et al. Study progress and development trend of mine geological disaster monitoring by UAV low-altitude remote sensing[J]. Metal Mine, 2023(1):17-29.
[7]ABDOLLAHNEJAD A, SUROVY P, CHITECULO V, et al. Determining tree height and crown diameter from high-resolution UAV imagery[J]. International Journal of Remote Sensing, 2017, 38: 2392-2410.
[8]耿林,李明泽,范文义,等.基于机载LiDAR的单木结构参数及林分有效冠的提取[J].林業科学,2018,54(7):62-72.
GENG L, LI M Z, FAN W Y, et al. Individual tree structure parameters and effective crown of the stand extraction base on air born LiDAR data[J]. Forestry Science, 2018, 54(7): 62-72.
[9]CHEN R, LI C, ZHU Y, et al. Extraction of crown information from individual fruit tree by UAV LiDAR[J]. Nong Ye Gong Cheng Xue Bao/Transaction China Social Agriculture Engineering, 2020, 36(22): 50-59.
[10]REASON M, IAIN W, FRANCE G, et al. Structure from motion (SFM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries[J]. Forests, 2017, 8(3): 68.
[11]CAO L, LIU H, FU X, et al. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests[J]. Forests, 2019, 10(2): 145.
[12]XU D, WANG H, XU W. LiDAR applications to estimate forest biomass at individual tree scale: Opportunities, challenges and future perspectives[J]. Forests, 2021, 12: 550.
[14]LI W K, GUO Q H, JAKUBOWSKI M K, et al. A new method for segmenting individual trees from LiDAR point cloud[J]. Photogrammetric Engineering and Remote Sensing, 2012, 78(1): 75-84.
[15]WANG H, WANG S, CHEN Q, et al. An improved filter of progressive TIN densification for LiDAR point cloud data[J]. Wuhan University Journal National Science, 2015, 20(4): 362-368.
[16]何少東,黄洪宇,陈崇成.影像采集参数对无人机遥感估测树高精度的影响[J].福州大学学报(自然科学版),2020,48(5):558-565.
HE S D, HUANG H Y, CHEN C C. Influence of image collection parameters on the accuracy of tree height estimation based on UAV remote sensing[J]. Journal of Fuzhou University (Natural Science Edition), 2020, 48(5): 558-565.
[17]刘彦枫,李紫荆,吴勇,等.西双版纳栎林和思茅松林地上生物量遥感估测[J].西部林业科学,2023,52(1)147-155.
LIU Y F, LI Z J, WU Y, et al. Incorporating stratification of age groups and topography for aboveground biomass estimation of Quercus spp. forests and Pinus kesiya var. langbianensis forests in Xishuangbanna by remote sensing[J]. Journal of West China Forestry Science, 2023, 52(1):147-155.
[18]景维鹏,张明伟,林敬博.一种神经网络架构搜索遥感图像分类方法[J].哈尔滨理工大学学报,2021,26(1)25-29.
JING W P, ZHANG M W, LIN J B. A network architecture search remote sensing image classification method[J]. Journal of Harbin University of Science and Technology, 2021, 26(1):25-29.
[19]柯敏,解静,刘昔.基于单站三维激光扫描数据的林木胸径提取方法[J].浙江林业科技,2019,39(2):87-91.
KE M, XIE J, LIU X. Extraction method of DBH based on 3D laser scanner of single station[J]. Journal of Zhejiang Forestry Science and Technology, 2019, 39(2): 87-91.
[20]李海奎,雷渊才.中国森林植被生物量和碳储量评估[M].北京:中国林业出版社,2010:1-58.
LI H K, LEI Y C. Estimation and evaluation of forest biomass carbon storage in China[M]. Beijing: China Forestry Publishing House, 2010.
[21]BREDE B, CALDERS K, LAU A, et al. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR[J]. Remote Sensing Environment, 2019, 233: 111355.
