融合LiDAR点云与高分影像的单木检测方法研究
2021-11-14艾明耀
刘 欢,王 玥,艾明耀
(1.武汉大学遥感信息工程学院,湖北 武汉 430079)
随着各种遥感技术的飞速发展,高分辨率光学遥感与三维激光雷达遥感在林业资源调查和监测中应用越来越广泛,单木检测更是林业资源管理和监测的关键。高分辨率遥感影像具有高空间分辨率和纹理信息,但无法探测单木的垂直结构信息,而激光雷达能够穿透树冠,获取树木从地面到树冠的三维坐标点云,但其辐射纹理信息缺乏[1]。将这两种数据结合起来,提高基于遥感技术的单木分割提取和检测的准确性和效率,是当前林业遥感发展的趋势。
1 单木检测方法
当前基于高分影像的针对不同地理对象的分割分类方法已经颇多,单木作为一种对象也是各种高分影像面向对象分割方法提取的研究热点,但受制于高分影像数据特点,各种基于高分影像的单木检测只能提取勾勒出单木树冠,难以实现单木定位及单木结构信息的进一步提取。
机载激光雷达可以获取具有垂直分布结构信息的树木三维激光点云,使得单木检测、定位及精确结构参数提取成为可能。机载LiDAR点云滤波分类可快速构建数字表面模型DSM和数字高程模型DEM,将 二者作差得到树冠高度模型CHM,即可进行单木提取分割[2]。王平等[3]利用在黑龙江省伊春市凉水自然保护区的LiDAR点云数据进行了单木检测与树木参数提取研究,计算出单木冠幅大小,通过与实地测量数据对比,平均精度在85%以上。Chen等[4]提出过一种基于冠层极值模型CMM的树顶探测方法对树木冠层进行分割提取,该方法所使用的空间插值方法和格网间距选择会引入误差导致单木分割不确定性。Koukoulas[5]采用机载LiDAR点云对阔叶林优势树种的树冠顶部多边形进行了检测,通过与CHM叠加空间分析对单木的树冠顶部进行定位来提取树高,得到91%的 精度。
当前基于LiDAR点云的单木检测研究表明,采用机载LiDAR点云单木分割结果精度与树冠形状多边形提取精度以及所生成的CHM的精度息息相关,而高分影像则在树冠分割方面具有显著的优势,因此,本文提出将高分影像和机载LiDAR点云结合,以高分影像提取的树冠作为约束,对机载LiDAR点云进行单木点云分割,进而引入局部冠层高度模型进行单木定位和检测,从而得到更准确的单木检测结果,提升单木定位精度,为后续单木结构参数的提取奠定 基础。
2 融合的单木检测方法
本文单木检测方法主要包括基于高分辨率影像的树木范围提取、原始点云与单木点云分类并分别生成单木冠层高度模型以及基于冠层高度模型的单木定位分割等主要步骤,其算法流程如图1所示。

图1 本文单木分割方法
本文方法以研究区域内的高分影像和机载LiDAR点云为数据源,在高分影像和机载LiDAR点云数据严格配准基础上,以高分影像确定的单木分布区域作为约束输入,将机载LiDAR点云中逐个单木点云分割出来,针对单木点云更加稳健的建立精确的冠层高度模型(CHM),在此基础上利用单木局部CHM对单木进行准确定位和分割。
2.1 高分辨率影像树木范围提取
高分辨率影像中树木范围的提取采用面向对象分割方法在研究区域的高分正射影像上进行。面向对象的多尺度分割通过将相邻的像素或小的分割对象合并,在保证这些对象与对象之间平均异质性最小、对象内部像元之间同质性最大的前提下,形成各对象分割层,进一步基于区域合并技术对分割对象进行区域合并,形成各个影像对象,自动分割精度高[6]。本文直接采用易康(eCognition)软件的面向对象多尺度分割模块对单木树冠进行分割,得到单木树冠多边形 图层。
2.2 单木点云分类
高分正射影像经过摄影测量几何处理,与LiDAR点云精确配准,具有相同的地理参考。将高分正射影像树冠图层与LiDAR点云叠加,以树冠多边形作为外接包围盒,即可将单木点云逐个分离出来。图2中分别给出了正射影像上单木树冠多边形、树冠多边形与LiDAR点云叠加和分离出的单木点云示例。

图2 LiDAR点云单木分离
2.3 单木冠层高度模型(CHM)生成
冠层高度模型(CHM)为点云数字表面模型 (DSM)和数字地形模型(DEM)的差值,如 式(1)[7-9]:

对于单木点云,由于没有其他类型地物,如建筑物、独立地物等影响,可以直接以点云特征点插值生成DEM,DSM则由顶部点生成。较全局范围内CHM生成,局部单木点云生成CHM更为简单和准确。图3中红圈所示给出了部分典型单木点云的CHM。
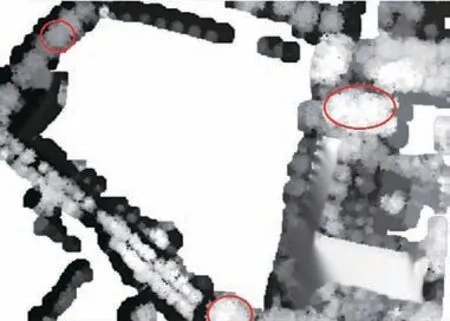
图3 单木点云CHM
2.4 基于分水岭算法的单木CHM分割
得到单木点云CHM后,本文采用分水岭算法对单木进行定位和精确分割。具体步骤如下:
1)单木CHM图像梯度处理,作为算法输入图像,如式(2):
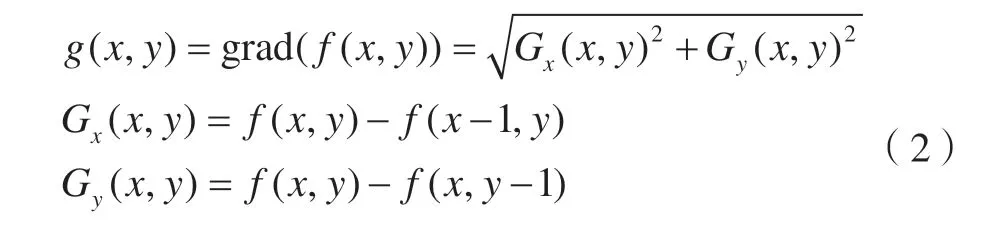
式中,f(x,y)即为输入的单木CHM图像;grad()为梯度运算。
2)对梯度图像进行阈值处理来消除灰度的微小变化产生的过分割,如式(3):

式中,gθ表示阈值,通过多次实验设置来取得梯度图像的最佳限制效果,并获得适量的待分割区域,以此确定最佳阈值,以得到最佳分割效果。
3)对图像的每个像素进行灰度由低到高的排序,并从低到高模拟进行“水淹没”,在这个过程中,每一个局部极小值都需要作出判断并加以标注。
最终,通过分水岭变换得到的是CHM的蓄水盆图像,蓄水盆地之间的边界点,即为“分水岭”,它表示图像的极大值点[10-12],取极大值点即为单木中心,对应的CHM值即为树木高度,基于单木中心可进一步精化树冠多边形。
3 实验结果与分析
3.1 实验区域及数据
实验区域采用Trimble Harrier68i设备获取区域的光学影像和激光点云数据,制作高分辨率正射影像。点云间隔为0.2m,影像分辨率为5cm,测量精度优于10cm。实验区域的高分影像及LiDAR点云数据如图4所示。
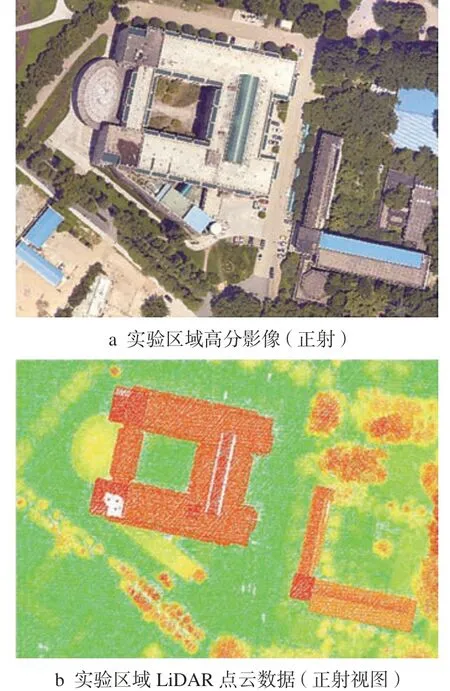
图4 实验区域及数据
为了验证本文单木定位检测精度,联合高分辨率正射影像及LiDAR点云以目视解译和实地核查的方式得到实验区域内单木数量、单木中心坐标、单木高度等信息,视为地面真实数据,如图5所示。

图5 目视解译结果
如图中标注点所示即为单木实验区域内共计147棵 单棵树木,其中最大高度为26.554m,最低高度为1.011m。
3.2 结果分析
基于高分正射影像单木树冠分割结果、基于LiDAR点云CHM单木分割结果和本文方法单木分割结果,如图6所示。
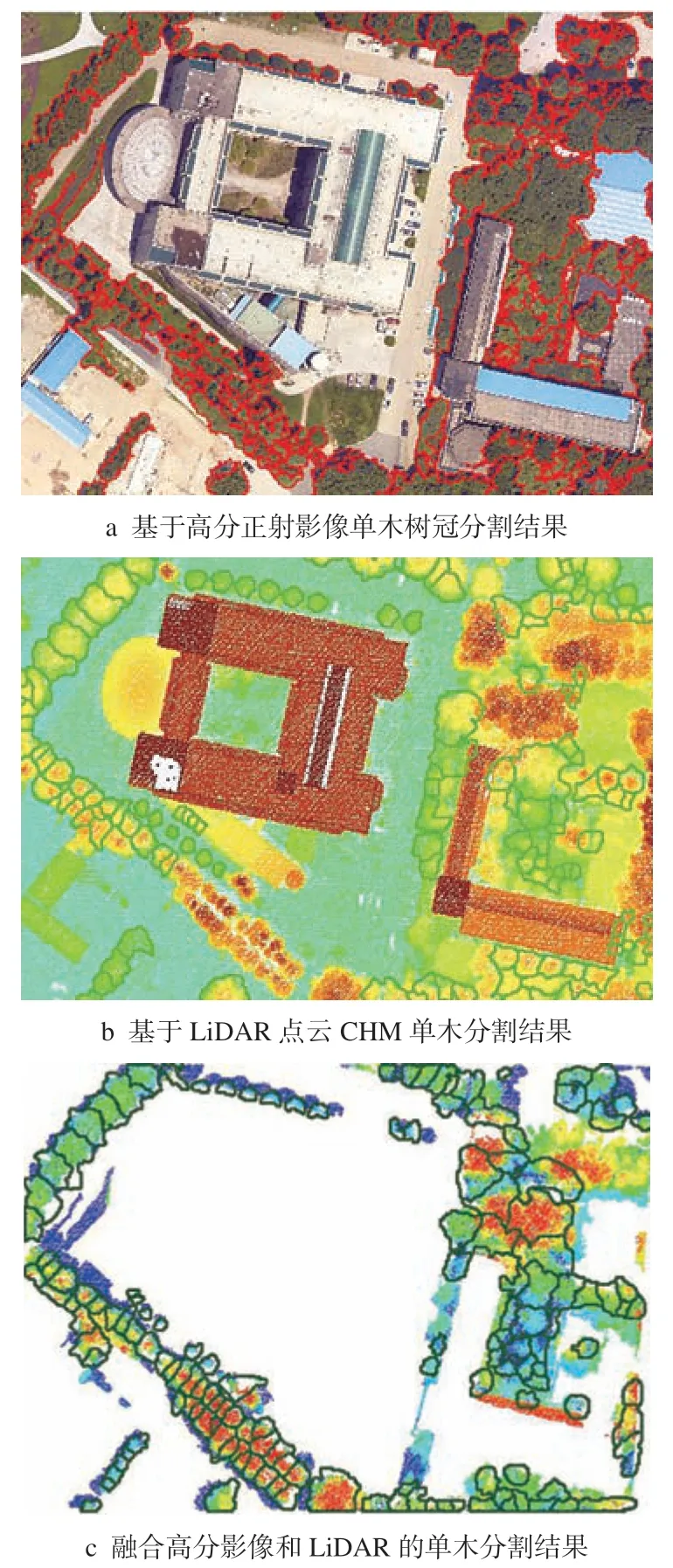
图6 3种方法单木分割结果
3.2.1 单木检测精度
将3种单木检测结果与地面真实数据进行对比分析,分别统计单木检测正确率,其结果如表1所示。
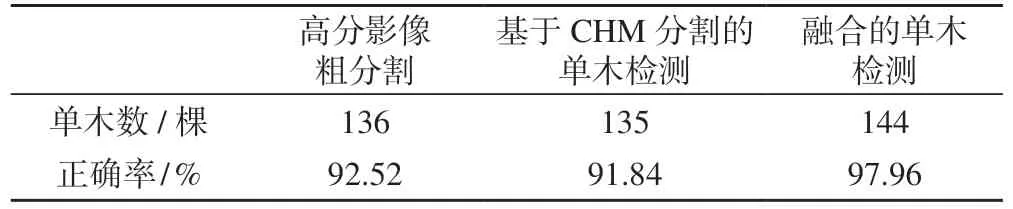
表1 实验结果的统计
由表1可见,本文方法实验结果整体上精度优于基于高分正射影像和LiDAR点云CHM的单木分割结果的精度,分割结果中正确的树木结果数量有较大提高。
3.2.2 单木定位和树高精度对比
在分割结果中,选择部分单木与实地测量结果进行单木定位和树高测量精度验证,统计X、Y坐标以及树高数据,如表2所示。可以看出,本文方法比传统的基于LiDAR点云CHM分割方法的定位与单木树高精度均有提高。
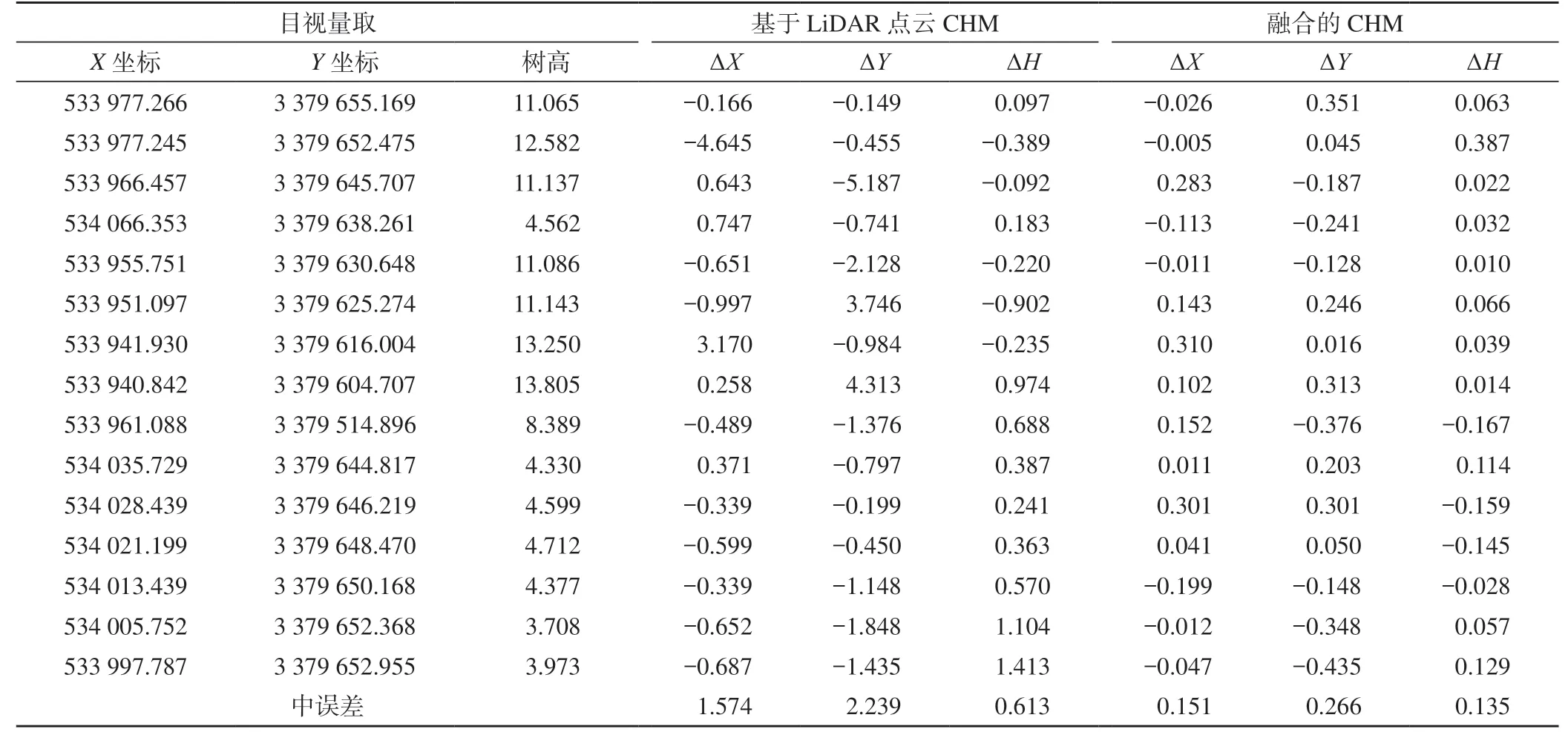
表2 部分单木分割结果位置与树高的统计/m
4 结 语
本文研究结合高分影像空间分辨率高而LiDAR点云数据具有三维信息的特点,提出融合这2种数据进行单木检测的方法,实验结果表明:融合高分影像和LiDAR点云数据能够充分利用高分影像和激光雷达点云优势,在一定程度提高单木检测的结果精度,在城市园林调查监测、森林调查等领域具有广泛的应用前景。
