基于扰动预测的网联车鲁棒协同巡航预测控制
2024-01-18何德峰冯阳辉穆建彬
何德峰,冯阳辉,穆建彬
(浙江工业大学 信息工程学院,浙江 杭州 310023)
协同自适应巡航(Cooperative adaptive cruise control,CACC)的主要功能是基于V2V(Vehicle-to-vehicle)车载通信技术,保证多辆车以相同速度在同一车道上保持近距离行驶,其对于提高交通效率和驾驶安全性有着重要意义[1-3]。相较于自适应巡航控制(Adaptive cruise control,ACC),CACC不仅可以通过传感器获取前车速度和位置信息,还可以通过V2V通信获取更多附加信息,如前车当前的加速度信息。有效利用这些信息可以很好地提高车辆队列的整体性能。在网联车协同控制中,如何有效利用V2V的附加信息提高控制性能已经受到了学者们的广泛关注[4-10]。模型预测控制(Model predictive control,MPC)作为一种先进的控制技术已被广泛应用于智能网联车控制中,与传统控制算法相比,它能够处理饱和约束和多目标控制问题。然而传统的MPC对模型较为依赖,当出现模型外的扰动时,控制器可能违反约束,无法保证原本的控制性能[11-12]。为了解决这一问题,提出了可以显式处理扰动影响的鲁棒MPC算法。目前鲁棒MPC主要分为min-max MPC和tube MPC。前者考虑扰动作用下性能指标最差的情况来求解优化变量[13]。然而考虑到该算法在线求解的优化问题较为复杂,在实际应用中实时性可能无法得到保证。而tube MPC在线计算时,无须显式处理扰动的影响。tube MPC在离线阶段已经计算好扰动的鲁棒不变集,之后通过扰动的鲁棒不变集对名义系统的约束进行紧缩处理,以确保实际系统在扰动下仍满足约束[14-15]。在车辆控制过程中扰动是不可避免的,因此针对使用鲁棒MPC处理扰动已经有了诸多研究成果,Lin等[16]针对ACC系统前车未来速度未知的情况,首先通过常数预测的方法得到前车的速度预测值,然后根据已知的物理约束条件,通过离线计算得到一个更紧凑的扰动不变集,达到降低保守性的目的。Luo等[17]通过设计比例多重积分观测器来估计扰动,采用前馈和干扰补偿的方式组成综合控制律来控制PLF(Predecessor-leader-follower)通信拓扑下的车队,保证车辆在扰动下达到控制目标。
针对鲁棒MPC在处理扰动下的车辆队列控制方面虽然已经有了诸多研究,但是当车辆通信传递的信息有限时,如车辆只能获取前车的当前加速度信息,现有方法处理系统不确定性带来的扰动均有一定的局限性,如tube MPC具有较高的保守性,min-max MPC的计算复杂度较高、实时性难以保证。因此在通信资源和计算资源有限的情况下,如何保证车辆队列控制在不确定工况下的实时性和稳定性仍具有进一步研究的意义。因此笔者针对前车未来加速度信息不确定的工况,基于管(tube)的概念,设计了一种tube MPC算法来处理车辆队列的巡航控制问题[12]。控制器主要由状态反馈、前馈补偿和tube MPC组成。笔者在Lan等[13]的研究基础上用tube MPC代替了min-max MPC,在不影响控制性能的前提下,缩短了优化问题的在线计算时间。此外,还根据滚动预测扰动范围得到了更紧凑的扰动多面体,进而降低了保守性,提升了控制性能。笔者首先介绍了车辆队列的纵向运动学模型以及控制目标;然后介绍了算法设计并分析了递推可行性和稳定性;最后通过仿真验证了算法的有效性。
1 问题描述
由于笔者研究的车辆队列中车辆都行驶在同一车道,因此没有转向操作。假设车队的横向控制是稳定的,只需考虑纵向运动学。假设车队由M辆车组成,车队的领航车辆编号为0,其他的跟随车辆编号依次为1到M-1。车队采用PF(Predecessor-follower)通信拓扑,即每辆车可以通过V2V接收到前车的当前加速度信息,并将自车加速度信息发送给后车,前车的未来加速度对于后车是未知的。
1.1 车辆纵向运动学
车辆i的纵向运动学模型可以表示为
(1)
式中:pi(t),vi(t)分别为车辆i在t时刻的纵向位置和速度;ai(t)为车辆i在t时刻的加速度。车辆i可以通过车载传感器获得前车i-1的相对速度ev,i(t)和相对位置ep,i(t),其中ev,i(t)=vi-1(t)-vi(t),ep,i(t)=pi-1(t)-pi(t)。为了便于控制器设计,将原来的二阶模型式(1)改写为误差模型,即
(2)
式中:Δpi(t)=ep,i(t)-ds;Δvi(t)=ev,i(t)。∀i∈Z[1,M-1],ds代表车辆间的安全间距。为了便于之后的算法设计,选择采样时间为T,得到对应的离散模型,即
xi(k+1)=Axi(k)+Bui(k)+Ddi(k)
(3)

预测模型在k时刻对k+j时刻的预测表示为
(4)

(5)
因为前车加速度的变化是有界的,所以wi(j|k)是有界的,即
wi(j|k)∈[wmin,wmax],Δwi(j|k)∈[Δwmin,Δwmax]
(6)
式中:wmin,wmax表示扰动的极限值;Δwmin,Δwmax表示扰动变化率的极限值。因为无法直接对wi(j|k)进行建模,所以采用tube MPC对名义模型进行控制,使名义状态可以收敛,并将实际状态控制在以名义轨迹为中心的“tube”内。不考虑扰动wi(j|k)的影响,式(3)的车辆名义模型为

(7)

1.2 车辆队列控制目标
为了实现车辆队列稳定跟踪,需要满足以下控制目标:
1) 当车队稳定之后,所有跟随车辆可以跟踪领航车的速度轨迹,并且车辆之间可以保持一个固定的安全间距ds,即
(8)
2) 所有车辆的速度和加速度都满足物理约束,即
(9)
式中:vmin,vmax分别表示速度上、下界;amin,amax分别表示加速度上、下界。
3) 车队所有车辆的轨迹偏差ei(k)=[ep,i(k)-di,s,ev,i(k)]T需要满足以下约束,即
(10)
式中:ep,min,ev,min均小于0;ep,max,ev,max均大于0。
4) 车辆队列满足ISPF(Input-to-state-leader-predecessor)弦稳定[13],即存在一个KL函数σ1,一个K∞函数σ2和正数c1和c2,使车辆轨迹误差ei(t)满足

(11)

2 控制器设计
为实现第1节中的控制目标,笔者设计了一种由tube MPC、反馈控制和前馈补偿组成的综合控制策略,总体控制框架如图1所示。车辆i的控制律表示为
(12)

图1 控制器设计框架Fig.1 Framework of controller design
2.1 线性控制部分设计

(13)
控制律式(12)要求系统是稳定的,并且满足l2增益属性,即
(14)

(15)
式中
(16)
式中P为半正定矩阵。对于上述Riccati方程可以通过递归的方式来求解P[16]。当P确定后,对应的最优控制增益可以表示为
(17)
2.2 扰动范围预测
从预测模型式(4)中可以看出预测模型需要使用前车的加速度信息。由于前车的未来加速度无法直接获取,因此需要通过前车历史加速度信息di(k)对前车未来加速度进行预测,以此得到前车的未来加速度预测序列,即
(18)
W(j|k)={w|wmin(j|k)≤w≤wmax(j|k)}
∀j=0,1,…,N-1
(19)
式中
wmin(k+i|k)=min(max(0,w(k)+iΔwmax),wmax)
wmax(k+i|k)=max(min(0,w(k)+iΔwmin),wmin)
(20)
与式(6)相比,式(19)具有更紧凑的扰动范围。相较于k时刻,扰动wi(1|k)在k+1时刻是可获得的。因此不同时间扰动多面体的关系可以表示为
W(j|k+1)⊆W(j+1|k) ∀j=0,1,…,N-1
(21)
2.3 tube MPC设计
控制律式(13)可以保证控制目标式(8)和式(11)的实现,然而不能保证控制目标式(9,10)。因此接下来需要设计tube MPC控制器使系统式(4)满足物理约束和安全约束。控制目标式(9,10)要求系统式(3)满足
xi(k)∈X,ui(k)∈U,wi(j|k)∈W(j|k)
(22)
名义模型和实际模型的失配可以表示为

(23)
式中AK=A+BKx。扰动所在的集合可以表示为
(24)
式中⊕表示Minkowski集合相加。当R(j|k)确定后,名义模型的输入约束和状态约束可以表示为
(25)
(26)
为了实现1.2节中的式(9,10),将优化问题的目标函数设计为

(27)

Vi(k)=[vi(0|k),vi(1|k),…,vi(N-1|k)]
(28)
为了使实际系统状态轨迹保持在名义轨迹为中心的管上,将tube MPC的优化问题设计为
(29)
(30)
(31)
(32)
(33)
(34)
约束式(32)分别是名义模型的状态约束和输入约束,为了使综合控制律式(9)满足目标式(6,7)。约束式(33)为终端约束,其作用是保证系统最终收敛到终端约束范围内。
算法1车辆i的分布式tube MPC设计

当k≥0时,循环:
1) 车辆i通过雷达获得和前车i-1的相对速度ev,i(k)和相对位置ep,i(k),将传感器得到的当前状态作为名义模型的初始状态。



6)k=k+1,返回步骤1)。
3 性能分析
3.1 递推可行性
引理1如果优化问题式(29~34)在k-1时刻是有解的,那么系统对应的状态和控制输入满足控制目标。
证明令k-1时刻优化问题式(29~34)的解为
(35)
名义系统式(7)对应的预测控制输入序列为
(36)

(37)

(38)
因此,对优化问题式(29~34)的求解可以保证实际的系统式(3)满足状态约束和输入约束。证毕。
引理2如果优化问题式(29~34)在k-1时刻有解,那么在k时刻也一定有解。
证明将k-1时刻的最优控制序列作用于k时刻,控制输入预测序列表示为
(39)

(40)
进一步推导得到

(41)

(42)
(43)
由于在k-1处的最优解考虑了在预测时域上的扰动影响,因此在k处的名义状态满足以下关系[18],即

(44)

定理1假设优化问题式(29~34)在初始时刻k=0有解,那么优化问题式(29~34)是递推可行的。
证明根据引理1可知优化问题式(29~34)的解可以使原系统满足约束。由引理2可知如果优化问题式(29~34)在k-1时刻有解,那么在k时刻也一定有解。综上所述,若系统在初始时刻有解,则优化问题式(29~34)是递推可行的。证毕。
3.2 稳定性
(45)

(46)

(47)
式中j=0,1,…,N-1。进一步推导可得
(48)
(49)
假设1加权矩阵Q和R的选取满足
(50)

定理2若假设1成立,则系统式(3)在式(29~34)作用下是输入到状态稳定(Input to state stability,ISS)的。

(51)


(52)
将式(45~47)带入式(52)可得

(53)

(54)
若假设1成立,则
(55)
将式(55)带入式(53)可得

(56)
因为扰动wi是有界的,所以存在一个常数λ满足
(57)
因此

(58)
根据范数乘法性质和几何序列求和公式可得
(59)
选取标量常数ξ1和ξ2,使其满足
(60)
因此可以得到
(61)

4 数值仿真
在Matlab上考虑了由1辆领航车和4辆跟随车组成的车辆队列。车队保持PF通信拓扑,每辆车可以通过V2V通信,接收到前车的加速度信息并把本车的加速度信息发送给后车。车辆的具体参数如表1所示。
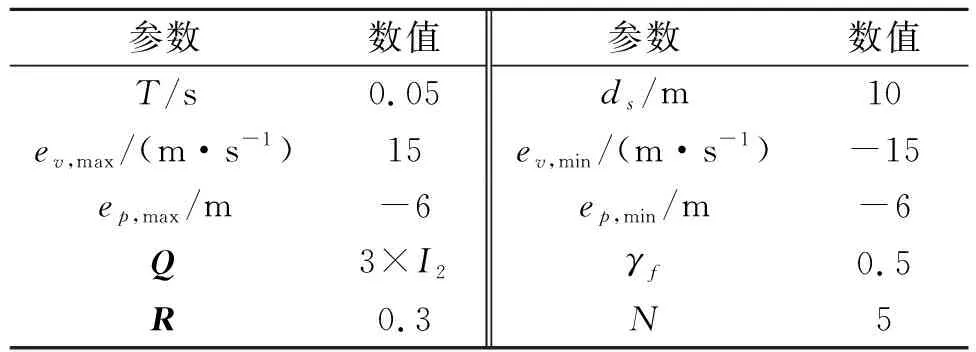
表1 仿真参数

传统的tube MPC和Pre tube MPC通过离线计算得到名义系统的终端不变集,结果如图2所示。由图2可知:通过滚动预测扰动范围,扰动鲁棒不变集的范围变小了,与此同时得到了更宽松的终端不变集。很明显Pre tube MPC在传统tube MPC的基础上降低了保守性。

图2 终端不变集对比Fig.2 Comparison of terminal invariant set
为了分析Pre tube MPC在车辆队列加减速工况下的有效性,跟随车辆的初始状态为xi(0)=[0.2,-0.1]T,i=1,2,…,5。领航车有一个加减速过程,速度轨迹如图3所示。

图3 领航车速度轨迹Fig.3 The pilot vehicle speed trajectory
上述3种算法在一个5辆车队列中的速度误差比较如图4所示。由图4可知:从初始误差的收敛性可以看出,tube MPC的收敛速度比min-max MPC的收敛速度快,当速度变化时,Pre tube MPC的收敛速度最小,这可以在紧急情况下减少不必要的加减速。3种算法的位置误差如图5所示。从图5中的局部放大图可以看出:3种算法都是ISPF稳定的,即前车的干扰误差不会沿着车辆队列的方向将扰动传播给后车。在车辆减速的过程中,与传统的tube MPC相比,Pre tube MPC位置误差变化范围较小,并且可以在短时间内快速收敛到0,min-max MPC位置误差变化幅度较小,然而最后会存在一个较小的恒定误差。Pre tube MPC可以将车间距离误差控制在更小的误差范围内,因此车辆间可以保持更小的车间距,这样在长度有限的车队中可以容纳更多的车辆。

图4 速度误差对比Fig.4 Speed error comparison

图5 位置误差对比Fig.5 Spacing error comparison
由图4,5可知:Pre tube MP和min-max MPC的控制效果相差不大,两者的线性控制部分的控制增益是一样的,两者区别主要在于对扰动的处理不同,min-max MPC将前车加速度视为扰动,因此扰动的范围是加速度的范围,扰动范围较大。而Pre tube MP对前车加速度进行了预测,将预测值和真实值的偏差视为扰动,相对来说扰动的范围比直接把前车加速度视为扰动的范围更小。
3种算法的控制输入比较如图6所示。传统tube MPC的控制输入大约在7.5 s时超过加速度约束范围,而Pre tube MPC仍然满足控制约束。这表明Pre tube MPC的保守性较低,在处理扰动方面更具有优势。3种算法的平均每步计算时间如表2所示。由表2可知Pre tube MPC的平均每步计算时间介于其他两种算法之间。相较于min-max MPC,Pre tube MP能够保证车辆在加性扰动作用下可以快速收敛到平衡点,同时具有更快的计算速度。

表2 计算时间对比
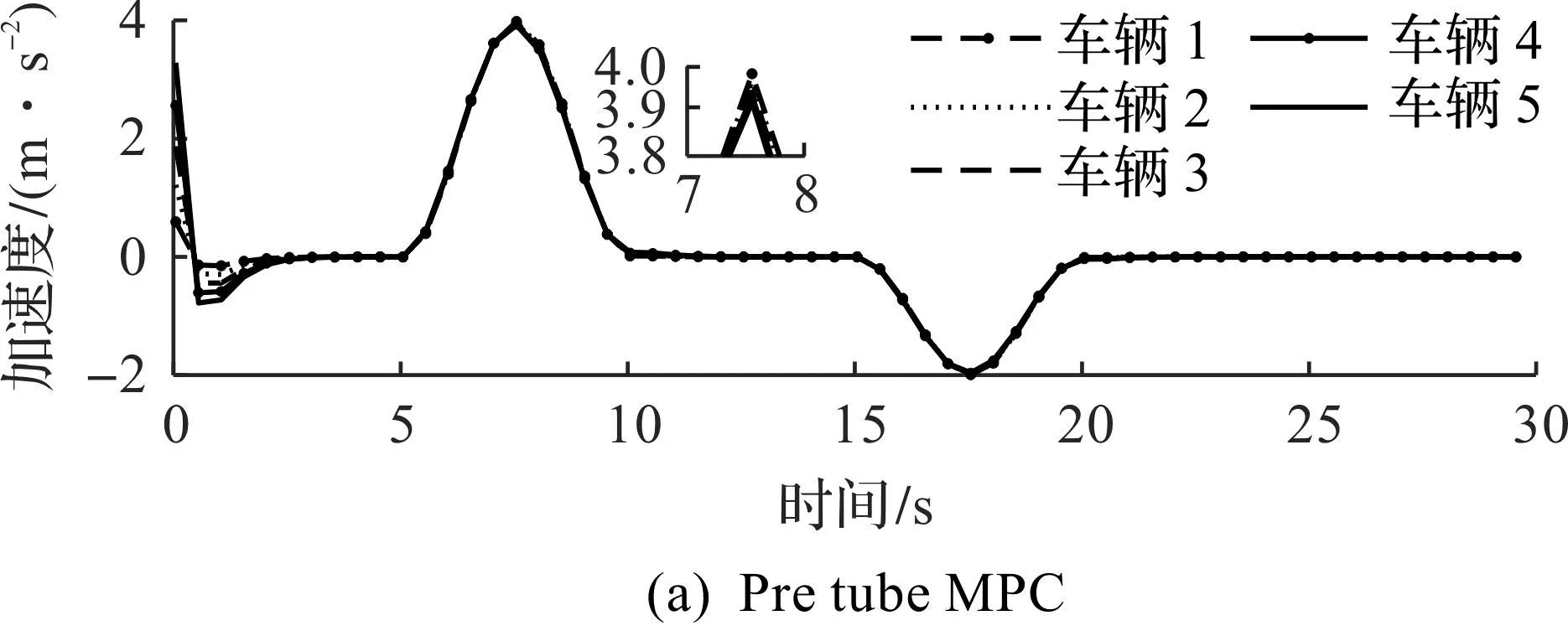
图6 控制输入对比Fig.6 Control input comparison
为了进一步分析Pre tube MPC在未建模扰动下的鲁棒性能,在一个所有车辆在同一车道上都以15 m/s匀速行驶的工况中引入一个正弦衰减扰动,仿真结果如图7所示。由图7可知:Pre tube MPC虽然在扰动衰减方面略低于min-max MPC,但其总体具有更好的性能。与传统的tube MPC相比,笔者所提Pre tube MPC在加性扰动下具有较好的弦稳定性。Pre tube MPC通过滚动预测扰动范围放宽了原名义系统约束的范围,从而提高了鲁棒性。

图7 外部输入扰动下的位置误差对比Fig.7 Spacing error comparison under external input disturbance
5 结 论
笔者提出了一种基于PF通信拓扑的Pre tube MPC算法,该算法可以处理前车在未来加速度不确定情况下带来的加性扰动并实现ISPF弦稳定。Pre tube MPC只需车辆通过PF通信拓扑来传输当前加速度信息,因此在一定程度上降低了通信负担。对应设计的算法通过滚动预测扰动范围降低前车未来加速度不确定的影响,相较于现有的tube MPC,Pre tube MPC有效降低了保守性,提升了控制性能。通过5辆车的仿真验证了算法的性能和实时性。此外,V2V中的通信延迟往往是不可避免的,燃油经济性也是一个重要的性能指标,在未来的工作中将考虑通信延迟和经济MPC。
