基于相位差测深声呐(PDBS)技术的莱州湾人工鱼礁探测
2024-01-13刘玉斌张建兴宋永东张毅涵栾振东
刘玉斌, 张建兴, 宋永东, 张毅涵, 栾振东, 3
基于相位差测深声呐(PDBS)技术的莱州湾人工鱼礁探测
刘玉斌1, 3, 张建兴1, 2, 宋永东1, 2, 张毅涵4, 栾振东1, 2, 3
(1. 中国科学院 海洋研究所 海洋地质与环境重点实验室, 山东 青岛 266071; 2. 中国科学院 海洋大科学研究中心, 山东 青岛 266071; 3. 中国科学院大学, 北京 100049; 4. 青岛海洋地质工程勘察院有限公司, 山东 青岛 266071)
相位差测深声呐(Phase Differencing Bathymetric Sonar, PDBS), 也被称作干涉式声呐(Interferometric Sonar), 可以同步采集水深点云数据和双频侧扫声呐图像, 完全适用于大范围的近海人工鱼礁探测。本文采用基于PDBS原理的Edge Tech 6205地形地貌一体化测量设备对莱州湾某海域海洋牧场投礁区进行全覆盖探测, 获取了高精度水深数据以及双频侧扫声呐图像。对水深数据进行地形特征变量计算, 精细刻画了研究区的微地形地貌特征, 并结合侧扫声呐图像通过多数据融合实现了对鱼礁边界的精准识别。在此基础上利用地理信息系统中的空间分析方法对人工鱼礁的水下物理参数进行计算和统计, 并探讨了研究区地形地貌的成因及其演化模式, 最后论证了基于PDBS的近海人工鱼礁探测技术具有高效率、低成本、高精度等诸多优势。研究结果表明, 研究区水深介于4.1~7.3 m, 鱼礁分布区有较大的海底起伏且在礁体周围存在明显的沉降和冲刷现象; 鱼礁总占地面积约占研究区的14.04%, 总空方量共计2 528.22 m3, 鱼礁高度介于1.26~3.63 m且呈正态分布。本研究为近海人工鱼礁探测提供了数据和技术支撑, 具有较强的实践意义。
PDBS; 人工鱼礁; 莱州湾; 海洋牧场; 多数据融合
海洋牧场是利用现代的科学技术手段, 借助自然地理优势来实现渔业资源增产的人工渔场[1]。人工鱼礁是海洋牧场建设过程中的关键技术手段, 增加了附着生物的附着面积, 引起了光、声、水体流态等物理环境的变化[2-3], 促进了物质和能量的交换[4], 从而为海洋生物的繁殖创造了有利条件, 对于保护海洋生态环境、渔业资源增产等方面具有积极的作用[5-6]。因此合理的人工鱼礁建设有助于保护资源环境、发展国民经济。高精度、高效率的水下探测和评估技术是人工鱼礁建设的重要一环[7], 是实现海洋牧场可持续发展的重要保障。
声波在水中具有衰减速度慢, 传播距离远等优势, 因此声学探测在海洋测绘领域已经成为不可或缺的探测手段。近年来, 随着多波束测深系统、侧扫声呐等声学设备的普及, 可以获取礁区高精度的水深地形数据, 然后通过地理空间分析技术来对表征鱼礁的特殊地形进行提取和分析, 从而实现水下人工鱼礁的精准探测[8-10]。其中多波束测深系统和侧扫声呐在水下人工鱼礁探测上都具有鲜明的优势: 多波束探测系统作为水深测量的主流手段, 可以提供高精度的水深数据来清晰快速确定鱼礁宏观位置和微观状态,并且准确地评估人工鱼礁的投放质量; 侧扫声呐根据提供的海底地貌及其底质信息来确定人工鱼礁投放的位置及形态[11]。但是单一设备所采集的数据往往不能很好地表征鱼礁的水下物理状态, 只有将多种声学数据相互对比验证, 才能实现对水下鱼礁的位置、形态、空方量等水下物理状态的精确计算[12-14]。相位差测深声呐(Phase Differencing Bathymetric Sonar, PDBS), 是海洋声学测深的一种常用技术手段[15], 其具有多条平行接收线阵结构, 发射一次声学信号之后利用多条平行线阵来同时接收海底回波信号, 通过回波信号中的相位差信息来计算回波入射方位角及海底深度信息[16-17]。简言之, PDBS是一种集成式的测深和双频侧扫声呐系统, 可以提供同步的双频侧扫和测深数据, 实时生成高分辨率的海底三维点云和侧扫声呐影像[18], 完全适用于浅海人工鱼礁的高精度快速探测。
随着PDBS技术的成熟[19], 多波束回声测深仪(Multi-beam Echo Sounder, MBES)和侧扫声呐(Side Scan Sonar, SSS)等声学探测技术在浅海探测领域中地位可能会被撼动。PDBS系统可以被看作是一种多层级的侧扫声呐, 通过比较不同层级之间的相位差来确定来自海底反射角, 最终收集宽条幅的测深数据和声呐的振幅数据[20]。PDBS系统在浅水中能够提供高分辨率的宽幅测深, 其条幅宽度是水深的10~15倍, 相比于典型的3~5倍水深的MBES性能有了显著提高。但长期以来PDBS系统的水深数据质量不高[21], 分辨率限制在水深的2%~3%, 且其尺寸和重量较大, 严重限制了其在近海探测的适用性。随着近期电子技术、相位反卷积技术以及算法的进步PDBS系统缺陷逐步消除[22-24]。新罕布什尔大学最近研究指出[25], 当前PDBS获取数据往往比MBES具有更高的标准差。研究还发现, PDBS和MBES水深数据之间的平均差异小于0.1 m, 并且PDBS能够准确分辨地形起伏为0.1 m小的沙波[26]。此外, PDBS系统还能够同步获得高分辨率的侧扫声呐数据, 这些数据可以和三维点云水深数据进行配准。在面对一些不确定的水深点云数据需要做出判断时, 这种特性具有非常重要的意义, 否则单一的水深数据会引起争议。随着近海浅水测绘需求的增加, 以及传统调查技术的低效率促使PDBS系统成为海洋声学设备公司开发的焦点。在高效率、低成本的基础上提高数据质量是当前海洋探测的主要需求, 而PDBS系统是在浅水环境中实现这些目标的最有前景的工具。
本研究采用基于PDBS技术的EdgeTech 6205对山东莱州湾某海洋牧场人工鱼礁分布区进行扫测, 对获取的高精度水深数据以及侧扫声呐影像数据进行相互验证、对比分析, 有效提高了数据的准确性, 实现了对鱼礁的精准识别与定位。此外, 利用地理空间分析技术实现了鱼礁的形态及位置参数的计算。最后分析了礁区地形地貌的特征及其成因, 为该海域海洋牧场的发展提供了数据支撑和技术支持。
1 研究区概况
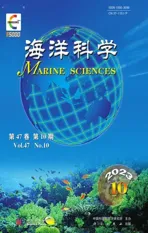
莱州湾, 位于渤海南部, 是黄河入海口与屺姆角的连线以南的海域(图1), 毗邻东营、潍坊、烟台, 是渤海三大海湾之一, 也是山东省最大的海湾。当前莱州湾的面积大概有6 060 km2, 随着莱州湾西北部黄河入海口的不断淤积, 海湾的面积有缩小的趋势。莱州湾水深较浅, 湾内水深大都不超过20 m, 且泥沙含量充足。黄河入海口给湾内带来了丰富的营养物质, 因此这里是我国海洋牧场的重点开发地。
海湾潮汐为不正规半日潮, 最高高潮位和最低低潮位分别为3.78 m和1.28 m。海浪的主波方向为NE向并随着潮汐的涨落而在S-W向和N-E向之间变化, 潮流主要沿顺时针的方向旋转。海湾内全年少雨, 冬季严寒, 夏季高温, 是典型的大陆性气候。湾内不仅具有丰富的卤水资源, 也具有充足的海洋生物资源, 是我国北部海域海洋生物资源的摇篮, 有“黄金海湾”的称号[27]。近年来, 山东蓝色海洋科技股份有限公司向湾内投放了大量的人工鱼礁和各类鱼苗, 有效实现了海洋生物资源的增产和增值。
人工鱼礁探测区处在莱州湾的东南部, 位于刁龙嘴海岸的西南方, 其南部建设有养虾场、海上风电场等海洋工程项目。刁龙嘴海岸是典型的砂质海岸, 该岸段自20世纪60年代以来发生了强烈的侵蚀后退现象, 侵蚀陡坎普遍形成, 海滩变窄变陡, 水下岸坡侵蚀严重, 这是风暴潮、波浪和风的共同作用的结果。海域南岸建设有规模较大的海洋养殖场以及大规模的海上风电, 海域内投放了大量的人工鱼礁、建设了大量的人工岛群, 如此大规模的海洋工程项目必然对莱州湾内海域的潮流、波浪等海流状况产生影响, 进而影响着莱州湾海域的冲淤变化。本文从人工鱼礁的角度着手分析探测区的冲淤变化, 对指导该区海岸防护、工程选址以及沿岸地区的经济发展规划具有重要意义。
2 研究方法
对莱州湾某海洋牧场人工鱼礁区进行了大规模全覆盖的鱼礁探测, 获取了高精度的水深数据以及双频侧扫声呐数据, 利用这些数据对人工鱼礁进行精准定位、边界识别以及参数计算。对于基于PDBS的水深数据而言, 虽然可以实现对鱼礁的精准定位, 但是对于起伏不大的鱼礁无法精准地圈定其边界; 对于基于PDBS的侧扫声呐图像而言, 虽然可以根据人工鱼礁底质和淤泥底质所反映出的声学回波强度的差异来识别地貌单元边界, 但是其位置信息的精度误差较大。基于此, 利用这两种数据优势互补的思想, 对鱼礁及其边界进行精准的定位和识别, 准确圈定鱼礁范围, 确定鱼礁斑块, 在此基础上利用DEM对研究区的各类鱼礁参数进行计算和统计。本文以其中的一小块典型礁区为例, 分析研究区的地形地貌特征, 准确识别了鱼礁边界并对鱼礁的物理参数进行了计算和统计。
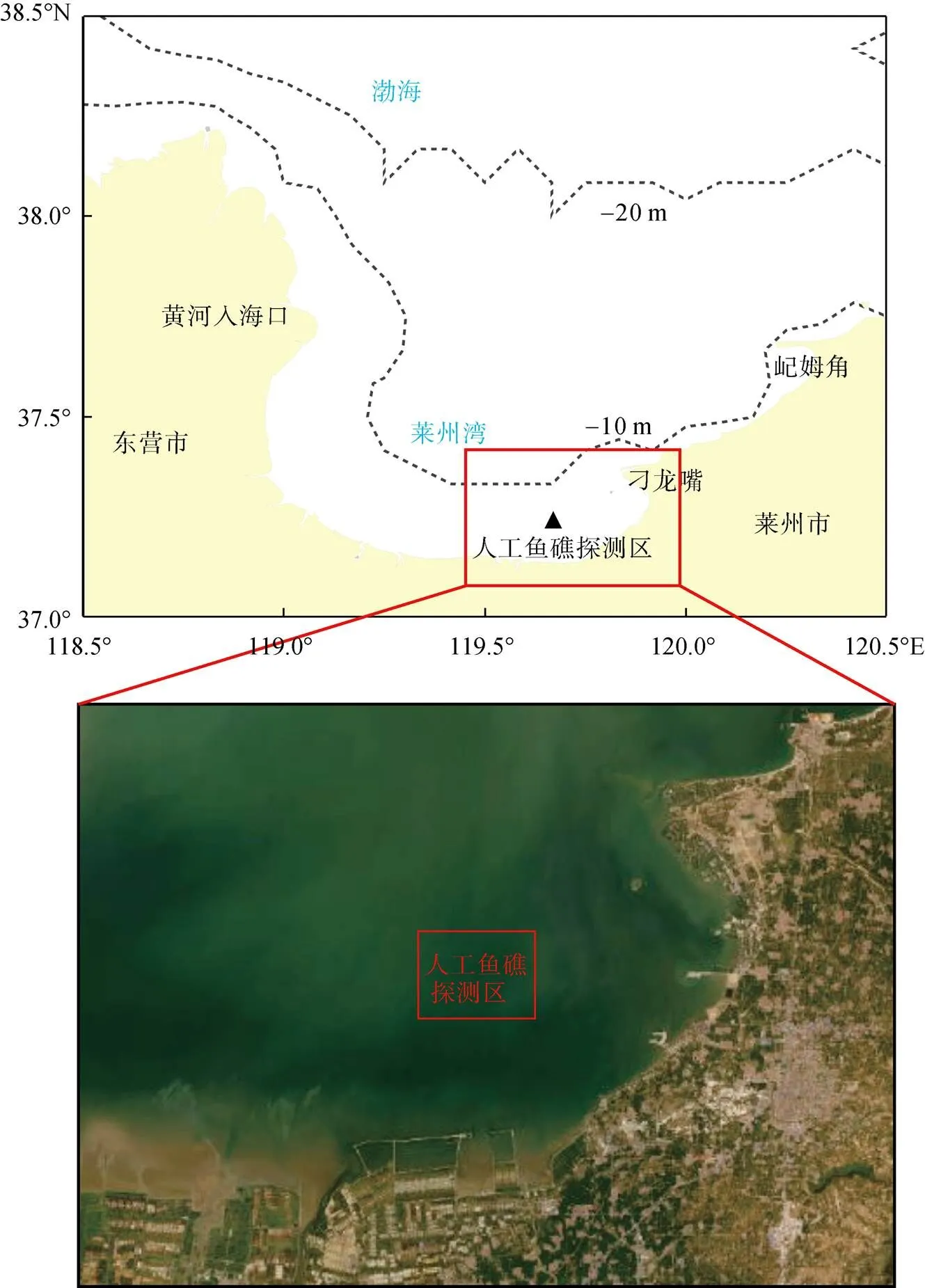
图1 研究区地理位置及其周边自然地理概况
2.1 数据采集
本研究的野外数据采集按照海洋调查规范(GB/T 12763.8—2007), 利用EdgeTech 6205采用走航式调查方式实现了对鱼礁的全方位探测, 获取地形点云数据和侧扫声呐图像。主测线以30 m为间距沿调查区WE向布设, 实现了海底全覆盖, 且重复覆盖率不低于20%, 船速控制在4节左右, 沿测线保持直线匀速行驶。外业调查采用WGS84坐标系, 投影方式为高斯克吕格三度带投影(Gauss Krueger-3 degree zones), 带号为Zone 40(118.5°E~121.5°E), 高程基准为国家1985高程基准。
2.2 数据处理与成图
利用CARIS 9.1软件对PDBS测得的水深数据进行处理, 处理流程包括声速折射修正、剔除噪点、潮汐改正、声速改正、海底曲面生成、数据合并等过程, 获取能够准确反映鱼礁形态位置等信息的研究区高精度水深地形数据。利用Sonarwiz软件对侧扫声呐数据进行处理, 在软件内利用调整增益、滤波、镶嵌、拼接等手段来提高图像的清晰度和准确度, 获取能够准确反映鱼礁位置和形态特征的侧扫声呐声学TIFF格式图像。
2.3 鱼礁边界识别与投礁空方量估算
鱼礁边界识别采用了基于PDBS的DME(Digital Elevation Model)法和侧扫声呐图像目视解译法[28]相结合的综合分析方法。基于PDBS的水深点云数据具有较高的分辨率, 能够建立礁区高精度的DEM。此外, 通过高精度的水深地形数据可以对地形因子进行提取, 尤其是坡度这种地形因子对于精准识别鱼礁边界至关重要。但由于水深数据的局限性, 对于起伏较小的鱼礁不能利用其与周边淤泥海底的底质差异进行区分, 这就要依赖同步测量的侧扫声呐图像了。不同的底质所产生的回波强度存在差异, 导致了侧扫声呐图像上的明暗差异。这种根据声波回波强弱所形成的明暗不均的声呐图像可以获取高分辨率的海底地貌单元属性信息, 进而通过目视解译法轻松识别人工鱼礁边界。但是由于侧扫声呐难免存在位置精度较低的问题, 因此在鱼礁边界识别的过程中, 首先利用侧扫声呐图像来准确圈定人工鱼礁的边界, 后续结合水深数据精准定位鱼礁。两种数据优势互补互相来确定鱼礁的几何边界, 有效提高了鱼礁识别的准确度。
本研究利用DEM法来计算空方量, 将识别的鱼礁边界当作理论海底底界面, 然后将网格的高度与理论海底底界面的高度之差作为积分高度, 将单位网格的面积作为积分单元, 最后把鱼礁范围内的体积累加求和所得结果即为鱼礁投放空方量。具体来说, 选取鱼礁边界构建多个鱼礁斑块作为鱼礁分布的投影区域, 将边界处的水深作为礁体的理论海底面, 构建人工鱼礁投放分布区的理论海底DEM, 对比实测的海底DEM进行子区域划分从而形成多个不规则的棱柱体, 利用ArcGis软件挖空方等三维空间分析功能, 计算获取人工鱼礁投放礁体的空方量。其计算的原理是将人工鱼礁斑块又继续划分出了较多的子区域, 每个子区域相对于鱼礁边界区的高层的差值乘以该子区域的面积, 便是该子区域的挖填方量, 进行累计求和便是我们所需要的鱼礁空方量。计算公式为:

式中:A为第个子区域的面积;H为第个子区域中鱼礁的水深;h为利用鱼礁边界建立的理论海底面的水深;为鱼礁斑块内子区域的数量;为当前计算子区域的编号;为所圈定的单个鱼礁的空方量。
3 结果与分析
3.1 研究区地形地貌特征
研究区面积3.32万km2, 地貌类型以淤泥地貌和人工鱼礁地貌为主。研究区范围内高精度DEM(图2)清晰展示了礁区的地形地貌特征。研究区整体地势平坦, 水深介于4.1~7.3 m, 但由于人工鱼礁的投放在礁区附近产生了较大的海底起伏, 形成了复杂多变的地形。人工鱼礁杂乱无章且广泛分布于研究区内, 在海底大多呈不规则的丘状堆砌, 在其周围出现明显的沉降冲刷现象。礁体间距离不一, 还有个别礁体彼此连接。

图2 基于PDBS高精度地形数据的研究区DEM
为了更好地展现投礁前后的地形起伏变化, 在西部平坦的未投礁区和其东部约35 m的位置处沿NE-SW向选取了-′和-′两处平行线进行地形剖面分析(图2)。由于两个剖面距离较近,-′近似代表了投礁前的地形,-′尽可能穿过较多鱼礁, 代表了投礁后的地形。典型地形剖面对比显示(图3), 投礁前研究区内水深在剖面上基本没有变化, 在6.8 m水深上下微有几十公分的起伏。而在投礁之后, 由于鱼礁的存在导致原本平坦的地形上产生了最大约2.5 m的地形起伏。此外, 投礁区的淤泥海底相对于未投礁区产生了约半米的高差, 这是投放鱼礁带来的海底冲刷的结果。
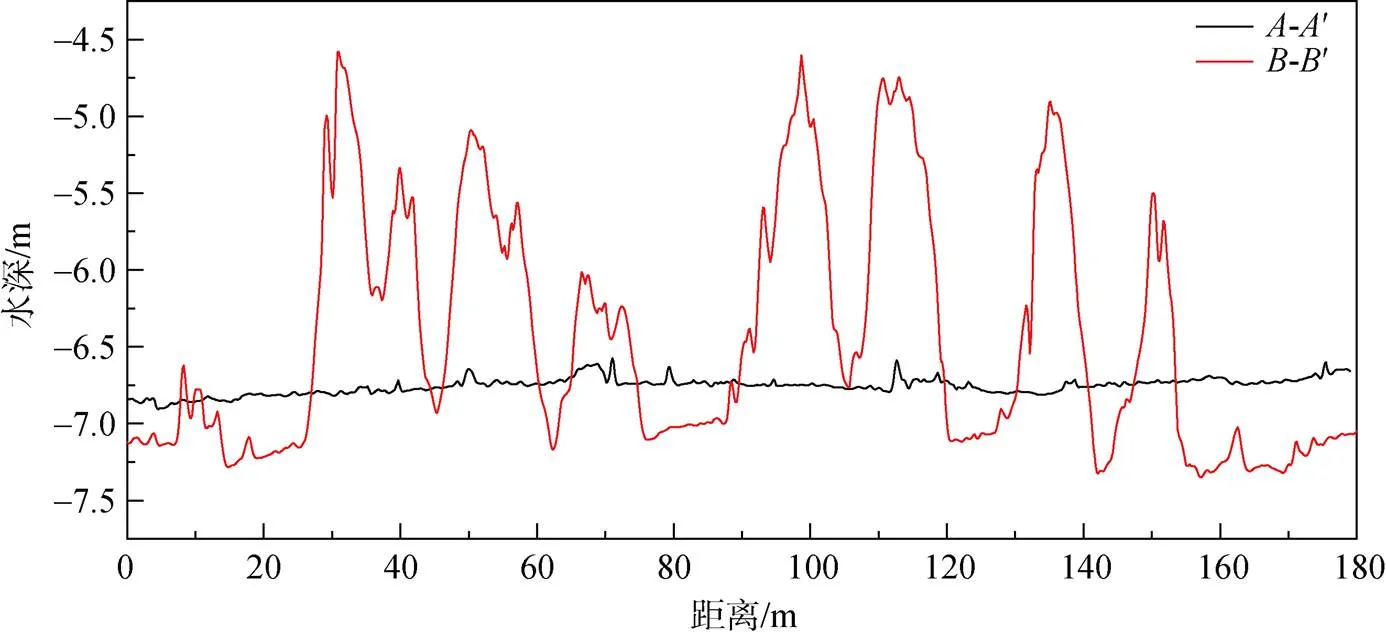
图3 典型地形剖面对比
研究区内鱼礁绝大多数都呈丘状堆叠, 位于研究区东北角的4堆鱼礁(图2)呈丘状, 且礁堆之间的间距较大, 可以清晰地呈现出单个鱼礁的形态特征, 以其作为典型鱼礁区非常具有代表性, 可以代表研究区整体的鱼礁形态来对研究区内的鱼礁微地貌特征进行进一步探究。选取典型鱼礁区(图2)进行三维展示, 并沿-′做典型鱼礁区的地形和坡度剖面图。三维地形图(图4a)显示不规则丘状堆砌的鱼礁高度不等, 以一定间距间隔排列, 周围有少量碎石散落。-′剖面所穿过鱼礁处具有明显的地形起伏(图4b), 鱼礁高度约为2.5 m。而淤泥海底和礁体的顶端没有明显的地形起伏, 坡度较小, 在鱼礁边界至鱼礁顶端以较高的坡度抬升。
图4 典型鱼礁区三维地形图(a)及其地形与坡度剖面(b)
3.2 人工鱼礁的水下物理状态
人工鱼礁水下物理状态主要包括礁体位置、占地面积、投礁空方量、礁体高度等信息。首先利用水深数据计算出礁区的地形特征变量, 结合侧扫声呐图像来进行鱼礁识别和边界圈定, 然后根据所圈定的范围对DEM进行斑块提取, 把斑块的面积视为鱼礁的占地面积, 把斑块内的水深最高点和水深最低点之差看作鱼礁高度, 对斑块内进行填挖方计算来反映鱼礁的空方量, 最终实现了人工鱼礁的水下物理状态统计。
坡度差异在礁区范围内最为显著, 利用坡度来进行人工鱼礁的识别和边界圈定是准确而有效的(图4b)。在人工鱼礁所在的位置处坡度表现出明显的高值(图5a), 据此对人工鱼礁进行识别和边界提取。但仅靠单一数据识别鱼礁往往会造成误判, 比如在一些地形起伏不明显的位置存在较为扁平的鱼礁而没有较大的坡度, 有时会被忽略。基于PDBS的侧扫声呐图像(图5b)可以从底质的角度来同步定位鱼礁,在侧扫声呐图像上具有阴影和亮斑等明显的声学特征。以此结合DEM共同识别这些被忽略的鱼礁, 有效提高了数据的可信度。通过对坡度和侧扫声呐图像的综合比对发现绝大多数鱼礁的位置、边界等信息可以完全对应, 但也存在少部分无法明确确定其边界的地形起伏不明显的鱼礁, 需要结合侧扫声呐图像来综合判定鱼礁的存在状态。
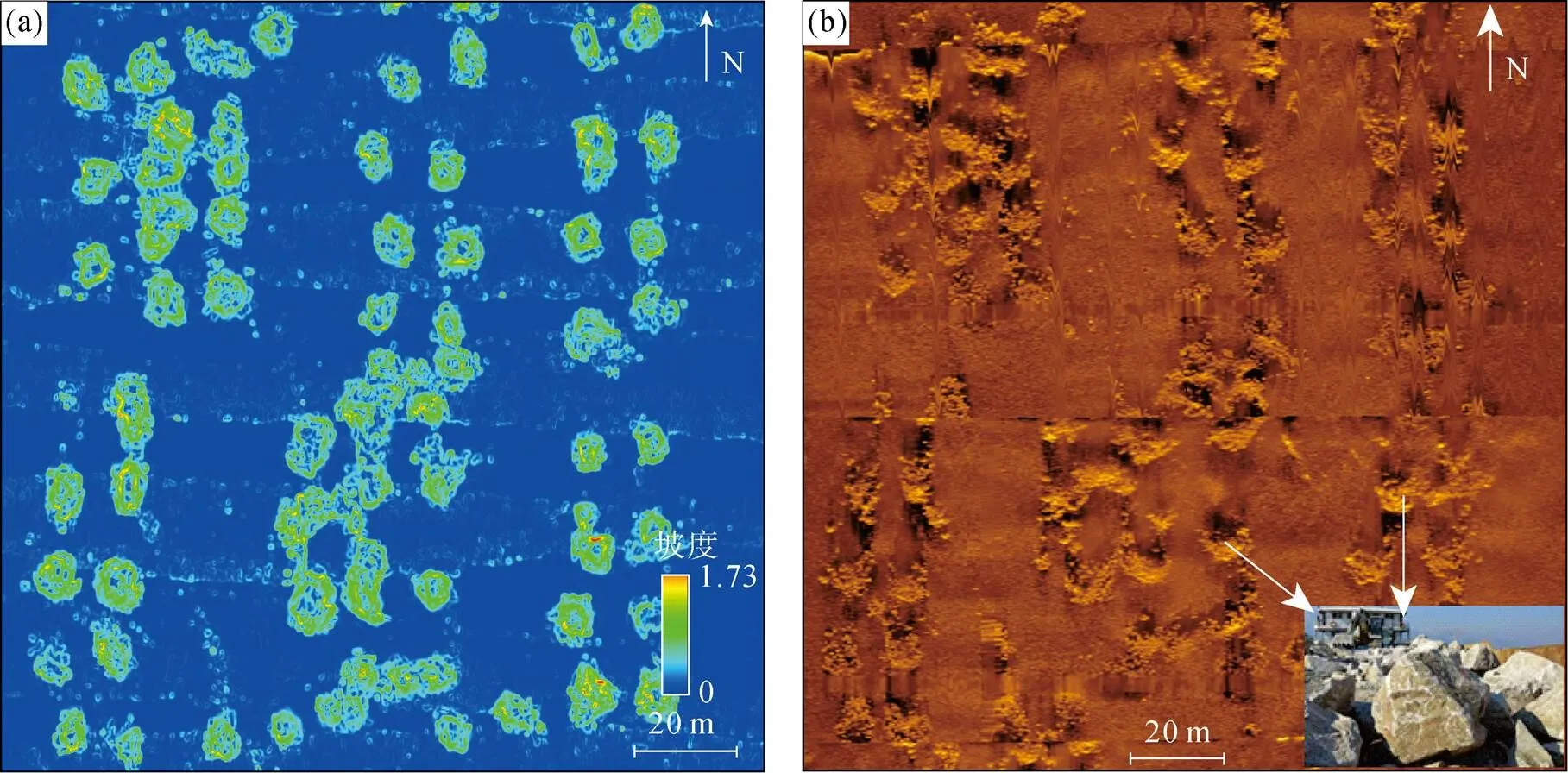
图5 基于PDBS的鱼礁识别
注: a研究区坡度; b为研究区侧扫声呐图像
利用坡度和侧扫声呐图像所圈定的鱼礁边界对研究区DEM进行斑块提取(图6), 共计获取了61块人工鱼礁斑块。这些斑块面积总计4 662.3 m2, 占整个研究区的14.04%, 它们大小不一且形状不规则, 在研究区内广泛分布。基于地理信息系统软件对斑块进行分析, 对其所反映的鱼礁占地面积、鱼礁投放空方量、鱼礁高度等物理参数进行了计算和统计。
针对宏观的角度而言人工鱼礁的水下物理状态包括鱼礁的占地面积和投放空方量。统计表明, 研究区内单个人工鱼礁的占地面积(图7a)在25~250 m2, 最大值(编号51)约是最小值(编号36)的5倍, 这是由于有些鱼礁堆之间相互连接(如编号51、编号34), 人为地将其划分成了一个较大的斑块。排除这两个较大的异常值,绝大多数鱼礁占地面积都在25~130 m2, 50%的人工鱼礁占地面积为50~88 m2。根据划分的鱼礁斑块计算得出研究区内人工鱼礁总投放空方量约为2 528.22 m3, 平均每一个鱼礁的投放空方量为41.45 m3。单个鱼礁的空方量具有较大差异(图7b), 50%的鱼礁为20~50 m3,存在较大鱼礁(编号34)可达117.34 m3和仅有4.97 m3的较小碎石礁(编号49)。
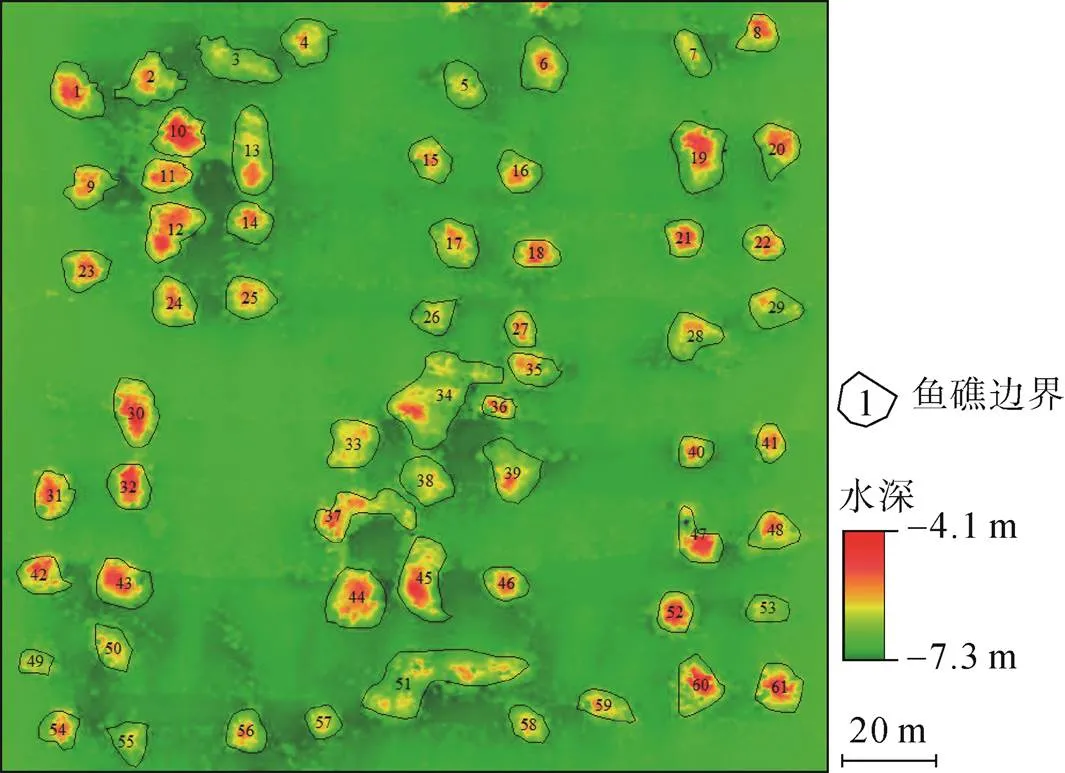
图6 鱼礁斑块提取

图7 鱼礁占地面积与空方量统计
人工鱼礁的高度是反映其微观层面物理状态的关键参数。本文对每一个鱼礁斑块区内的最高点水深和最低点水深进行统计, 并以其差值作为鱼礁高度(图8a)。统计表明, 鱼礁斑块内的最高点水深在–4~ –6 m, 说明鱼礁顶部参差不齐, 最高悬殊2 m, 并不在同一水平高度。鱼礁斑块的最低点代表了淤泥海底处的水深, 在–7.22 m上下有微小波动, 没有较大起伏, 表明在鱼礁斑块内部的淤泥海底基本都在同一深度。研究区内鱼礁高度 (图8b)呈正态分布, 最小高度为1.26 m(编号53), 最大高度为3.63 m(编号47), 平均高度为2.17 m, 礁体高度中位数为2.15 m, 大多数礁体的高度在1.85~2.45 m。
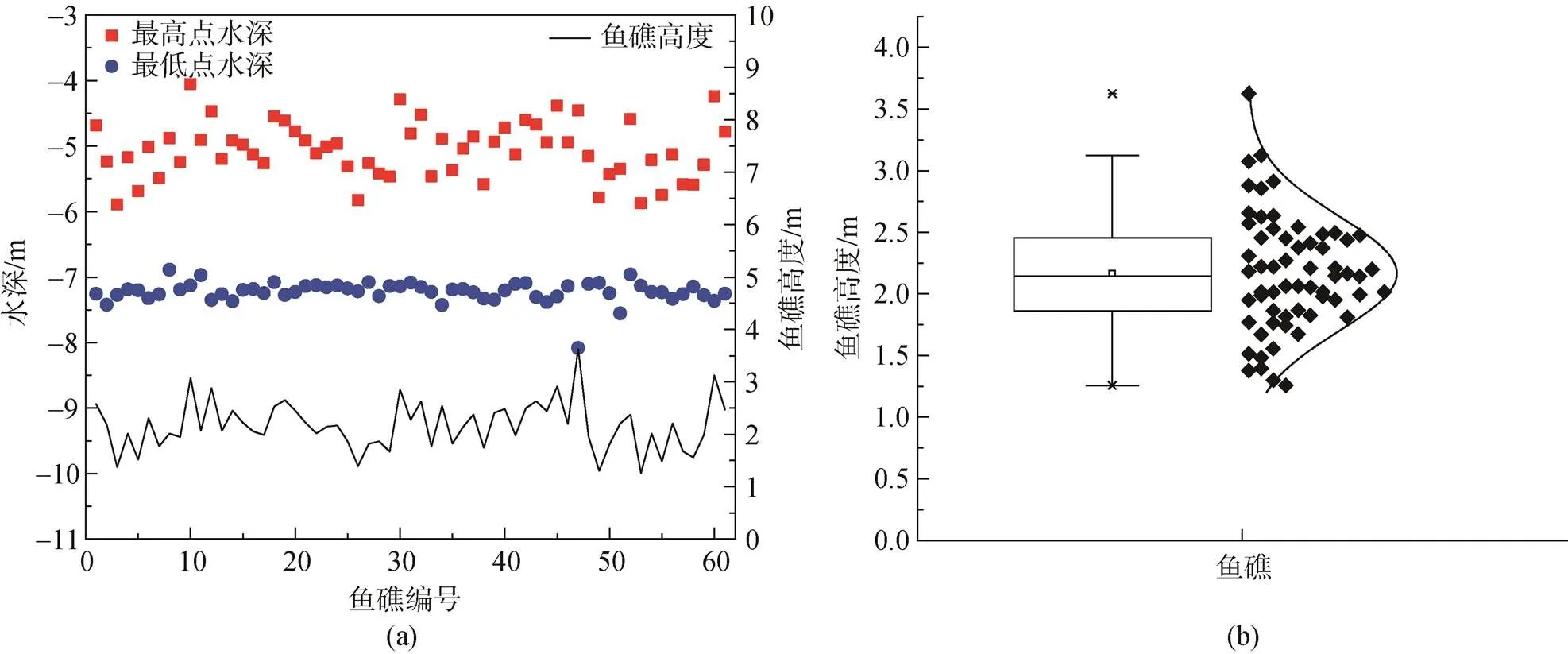
图8 鱼礁最高点及最低点水深及其高度统计
4 讨论
4.1 鱼礁区地貌成因探讨
人工鱼礁作为一种外来底质, 大规模地投放必然会对自然地形地貌环境产生迅速的影响。原本基本没有地形起伏的淤泥质海底由于人为投礁导致了人工鱼礁地貌的形成, 由原来接近6.8 m的均匀水深在投礁区演变成了4.5~7.5 m的地形起伏(图3)。统计表明研究区人工鱼礁平均高度2.17 m, 人工鱼礁所产生的高度差直接导致了海底产生了多个隆起并使局部水深变浅。此外礁体还对淤泥海底产生了直接或者间接影响, 导致了淤泥海底的冲淤。
礁体在投放之后, 其自身的重力作用会导致鱼礁在较软的淤泥海底在较长的时间尺度内产生缓慢的沉降, 在沉降的过程中发生了流体、淤泥海底以及鱼礁之间的相互作用, 这是礁区地貌形成的主要原因[29-32]。在礁石投放后, 由于自身重力作用导致礁石陷入淤泥海底(图9a), 造成了鱼礁投放区的海底沉降。陷入淤泥底部的鱼礁和周围的淤泥介质表现出明显刚性差异, 水动力条件因此而产生改变。据研究区的水深点云数据推测, 在鱼礁的一侧迎面而来的流体与礁体产生碰撞, 水平方向上的流体改变方向转而变成了垂直于淤泥海底的下降流(图9b), 这种方向被改变了的湍急流体与礁体的底部发生碰撞导致淤泥遭到冲刷。这种对鱼礁周边的淤泥海底不断冲刷的底层流会使得鱼礁与海底之间存在空隙, 进而导致礁体和周边淤泥海底之间摩擦力以及淤泥承载能力的减弱, 使礁体不断下陷。侧扫声呐图像显示, 在礁体周边海底相对于普通的淤泥海底具有更强的声呐图像亮度, 这表明前者具有相对较硬的底质, 说明鱼礁周围沉积物的粒度相对更大, 这代表了较强的流体动力环境。此外, 研究区内礁体之间的间距较小且数量庞大, 这种紧密排列会在礁体之间形成狭窄的通道从而使底层流速加快[33], 导致了礁体之间的淤泥遭受冲刷, 最终造成了鱼礁附近淤泥底质的“削平”(图9c)。当刚性的岩石礁体投放在淤泥海底之后, 尤其是在底层水动力强度大的海域, 至少需要6~7年才可以实现礁体的平衡和稳定[34]。因此, 定期对人工鱼礁水下物理状态进行精准探测对海洋牧场的可持续发展至关重要。
本文所使用的美国EdgeTech公司所开发的EdgeTech 6205 测深侧扫一体化设备是一种先进的PDBS系统, 它的条幅宽度是MBES系统2~3倍, 可以实现海底全覆盖, 而且它可以同时进行双频侧扫, 这样兼顾扫描范围和分辨率, 大大提高了近岸和浅水水文测量的效率并保证了作业安全[35]。EdgeTech 6205的左右两侧各有多条平行线阵构成的声呐阵, 声呐阵向两侧发射声波后, 海底的回波按照时间的先后被声呐阵接收, 通过估计各回波到达的来波方位, 即可计算出数百个测深深度, 而利用声信号的强度变化来获得侧扫声呐图像[36]。此外, EdgeTech 6205可以通过多个接受换能器所接受反射回波信号来计算出数据的平均值和标准差, 从而在统计学上实现噪点的去除, 获得每个测深点的准确数值[37]。EdgeTech 6205还设计了两个专用的侧扫声呐信号的接收和传输通道, 这使得该系统既能保留双频侧扫声呐的高分辨率图像, 还不会干扰测深信号。有学者单从水深测量的角度对传统的MBES和EdgeTech 6205进行了对比[37], 结果表明EdgeTech 6205不仅有精度的提升, 还大大减少了调查人员在海上的作业时间。EdgeTech 6205在作业现场始终为水深数据及时补充具有相同定位和时间戳的高分辨率双频侧扫图像, 经过后期处理, 这种同步进行的侧扫描图像为水深数据提供了参考, 在特征检测、目标分类和数据滤波等方面提供可靠证据。
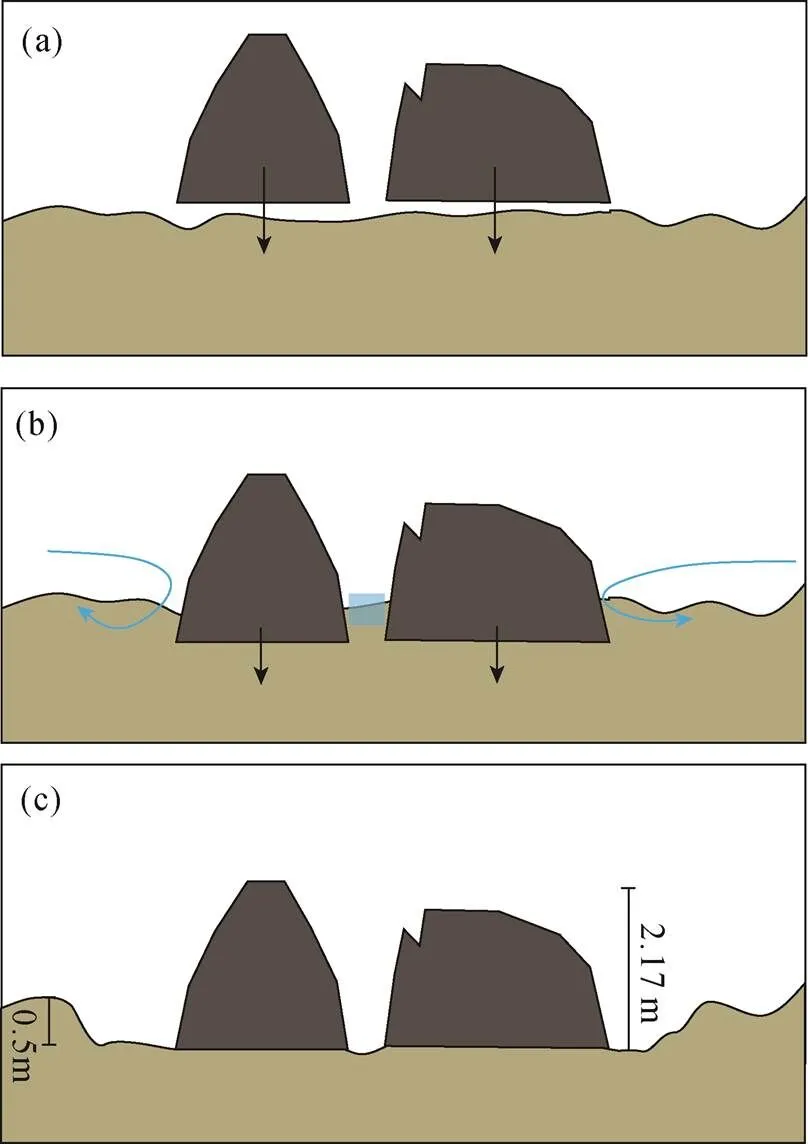
图9 鱼礁区地形地貌演化示意图
4.2 基于PDBS的人工鱼礁探测技术的应用探讨
不同声源优势互补对目标体进行探测与解译, 可提高探测的准确性, 减少解释误判[38]。在鱼礁探测工程中仅靠水深数据很难检测识别尺寸较小的鱼礁, 但高频侧扫声呐则可利用礁石处背向散射回波强的特点导致其与平坦海底产生了鲜明的对比, 从而实现对其的精准识别。EdgeTech 6205测深和双频侧扫描系统可以实现最大条幅宽度为150 m, 低频侧扫描的最大条幅宽度为300 m, 高频侧扫描的最大条幅宽度为70 m。在本次近海鱼礁探测的过程中, 研究区最大水深不超过10 m, 550 kHz和1 600 kHz的频率组合是很好的选择, 较低的频率用于大范围的鱼礁分布评估, 较高的频率用于探测目标鱼礁的微观物理状态。PDBS相对于MBES和SSS更适用于大范围的鱼礁扫测, 单次测线就可以获取水深数据和侧扫图像, 大大减少了探测的工作量, 实现了高效率探测, 极大降低了数据采集时间和成本。
5 结论
研究区水深介于4.1~7.3 m, 由于人工鱼礁的投放在研究区内产生了较大的海底起伏。鱼礁大多呈不规则的丘状杂乱无章地广泛分布于研究区内, 个别鱼礁之间彼此相互连接, 且在其附近的淤泥海底处出现了沉积物的冲刷、沉降和再悬浮等现象。特殊地貌成因主要包括礁体自身的重力作用以及底层流的冲刷作用。鱼礁总占地面积约占研究区的14.04%, 总空方量共计2 528.22 m3, 鱼礁高度介于1.26~3.63 m且呈正态分布。PDBS相比于MBES和SSS更适用于大范围的鱼礁扫测, 单次测线就可以获取水深数据和侧扫图像, 大大减少了探测的工作量, 而且这种同步进行的侧扫声呐图像为水深数据在数据处理、鱼礁识别、边界确定等方面提供了可靠依据。投放人工鱼礁在较短的时间内就会对周边的海洋环境产生显著的影响, 因此建议在人工鱼礁建设之后要重点关注礁体周边底层流的变化, 注意观测鱼礁周边海底的冲淤程度, 关注鱼礁的稳定性, 定期对鱼礁进行探测和维护, 从而促进渔业资源的发展。
[1] 杨红生. 我国海洋牧场建设回顾与展望[J]. 水产学报, 2016, 40(7): 1133-1140. YANG Hongsheng. Construction of marine ranching in China: reviews and prospects[J]. Journal of Fisheries of China, 2016, 40(7): 1133-1140.
[2] 陈勇, 于长清, 张国胜, 等. 人工鱼礁的环境功能与集鱼效果[J]. 大连水产学院学报, 2002, 17(1): 64-69. CHEN Yong, YU Changqing, ZHANG Guosheng, et al. The environmental function and fish gather effect of atificial reefs[J]. Journal of Dalian Fisheries College, 2002, 17(1): 64-69.
[3] CARR M, HIXON M. Artificial reefs: The importance of comparisons with natural reefs[J]. Fisheries, 1997, 22: 28-33.
[4] WANG X, FENG J, LIN C G, et al. Structural and functional improvements of coastal ecosystem based on artificial oyster reef construction in the Bohai Sea, China[J]. Frontiers in Marine Science, 2022, 9: 16.
[5] DOWNING N, TUBB R, ELZAHR C, et al. Artificial reefs in Kuwait, northern Arabian Gulf[J]. Bulletin of Marine Science, 1985, 37: 157-178.
[6] BUCKLEY R, HUECKEL G. Biological processes and ecological development on an artificial reef in puget- sound, washington[J]. Bulletin of Marine Science, 1985, 37: 50-69.
[7] 李东, 唐诚, 邹涛, 等. 近海人工鱼礁水下物理状态探测与评估[J]. 自然资源遥感, 2022, 34(1): 27-33. LI Dong, TANG Cheng, ZOU Tao, et al. Detection and assessment of the physical state of offshore artificial reefs[J]. Remote Sensing for Natural Resources, 2022, 34(1): 27-33.
[8] 李东, 唐诚, 邹涛, 等. 基于多波束声呐的人工鱼礁区地形特征分析[J]. 海洋科学, 2017, 41(5): 127-133. LI Dong, TANG Cheng, ZOU Tao, et al. Terrain character analysis of artificial reefs area based on multibeam echo sounder[J]. Marine Sciences, 2017, 41(5): 127-133.
[9] 佟飞, 唐振朝, 贾晓平, 等. 基于侧扫声纳方法的框架式人工鱼礁测量[J]. 南方水产科学, 2018, 14(1): 99-104. TONG Fei, TANG Zhenzhao, JIA Xiaoping, et al. Frame- type artificial reef measurement by side-scan sonar[J]. South China Fisheries Science, 2018, 14(1): 99-104.
[10] 郭栋, 董婧, 付杰, 等. 基于双频识别声呐的东港大鹿岛人工鱼礁调查研究[J]. 海洋湖沼通报, 2018, 2: 41-48. GUO Dong, DONG Jing, FU Jie, et al. Artificial reef and fisheries estimation in Dalu Island based on Dual Frequency Sonar[J]. Transactions of Oceanology and Limnology, 2018, 2: 41-48.
[11] SHEN W, MA J, ZHANG J, et al. Research on automatic identification method of artificial reef based on side scan sonar[J]. Hydrographic Surveying and Charting, 2019, 39: 34-37, 42.
[12] 李勇航, 单晨晨, 苏明, 等. 声学水面无人艇在浅水海底地貌调查中的应用[J]. 海洋地质与第四纪地质, 2020, 40(6): 219-226. LI Yonghang, SHAN Chenchen, SU Ming, et al. Application of acoustic unmanned surface vehicle to submarine geomorphology survey in shallow water[J]. Marine Geology & Quaternary Geology, 2020, 40: 219-226.
[13] LEVY N, BERMAN O, YUVAL M, et al. Emerging 3D technologies for future reformation of coral reefs: Enhancing biodiversity using biomimetic structures based on designs by nature[J]. Science of The Total Environment, 2022, 830: 154749.
[14] OKAMOTO M. Function of tyre-made artificial reefs by comparisons of fish faunas between artificial and natural reefs[J]. Bulletin of the Japanese Society of Scientific Fisheries (Japan), 1989, 55: 197-203.
[15] BRISSON L, WOLFE D, STALEY M. Interferometric swath bathymetry for large scale shallow water hydrographic surveys[C]//Canadian Hydrographic Conference. 2014: 1-18.
[16] MOHAMMADLOO T, GEEN M, SEWADA J, et al. Assessing the performance of the phase difference bathymetric sonar depth uncertainty prediction model[J]. Remote Sensing, 2022, 14(9): 2011.
[17] LURTON X. Swath bathymetry using phase difference: Theoretical analysis of acoustical measurement precision[J]. IEEE Journal of Oceanic Engineering, 2000, 25(3): 351-363.
[18] STEWART W, CHU D, MALIK S, et al. Quantitative seafloor characterization using a bathymetric sidescan sonar[J]. IEEE Journal of Oceanic Engineering, 1994, 19(4): 599-610.
[19] PORPILHO D, KLEIN A, CAMARGO R, et al. Automatic classification of bedforms using phase differencing bathymetric sonar[J]. CEP, 2014, 88061: 505-510.
[20] LURTON X. Precision analysis of bathymetry measurements using phase difference[C]//IEEE Oceanic Engineering Society. OCEANS'98. Conference Proceedings (Cat. No. 98CH36259). IEEE, 1998, 2: 1131-1134.
[21] MOUSTIER C. Signal processing for swath bathymetry and concurrent seafloor acoustic imaging[J]. Acoustic signal processing for ocean exploration, 1993, 92093- 0205: 329-354.
[22] GRIFFITHS H, RAFIK T, MENG Z, et al. Interferometric synthetic aperture sonar for high-resolution 3-D mapping of the seabed[J]. IEE Proceedings-Radar, Sonar and Navigation, 1997, 144(2): 96-103.
[23] KRAEUTNER P, BIRD J. Beyond interferometry, resolving multiple angles-of-arrival in swath bathymetric imaging[C]//Oceans' 99. MTS/IEEE. Riding the Crest into the 21st Century. Conference and Exhibition. Conference Proceedings (IEEE Cat. No. 99CH37008). IEEE, 1999, 1: 37-45.
[24] WILBY A. The advantages, challenges and practical implementation of an interferometric swath bathymetry system[C]//Oceans' 99. MTS/IEEE. Riding the Crest into the 21st Century. Conference and Exhibition. Conference Proceedings (IEEE Cat. No. 99CH37008). IEEE, 1999, 1: 23-29.
[25] BRISSON L, WOLFE D, STALEY M. Interferometric swath bathymetry for large scale shallow water hydrographic surveys[C]//Canadian Hydrographic Conference. 2014: 1-18.
[26] HILLER T, REED T, STEINGRIMSSON A. Producing chart data from interferometric sonars on small AUVs[J]. The International Hydrographic Review, 2011, 12: 43-50.
[27] HAN D M, KOHFAHL C, SONG X F, et al. Geochemical and isotopic evidence for palaeo-seawater intrusion into the south coast aquifer of Laizhou Bay, China[J]. Applied Geochemistry, 2011, 26: 863-883.
[28] ZHANG J X, GU H Y, YANG Y, et al. Research progress and trend of high-resolution remote sensing imagery intelligent interpretation[J]. Journal of Remote Sensing, 2021, 25: 2198-2210.
[29] 沈蔚, 章守宇, 李勇攀, 等. C3D测深侧扫声呐系统在人工鱼礁建设中的应用[J]. 上海海洋大学学报, 2013, 22(3): 404-409. SHEN Wei, ZHANG Shouyu, LI Yongpan, et al. The application of C3D bathymetry side scan sonar system in artificial reef construction[J]. Journal of Shanghai Ocean University, 2013, 22(3): 404-409.
[30] MASNADI S, MOUSTIER C, CERVENKA P, et al. Differential phase estimation with the SeaMARCII bathymetric sidescan sonar system[J]. IEEE Journal of Oceanic Engineering, 1992, 17(3): 239-251.
[31] STREICH M, AJEMIAN M, WETZ J, et al. A comparison of fish community structure at mesophotic artificial reefs and natural banks in the Western Gulf of Mexico[J]. Marine and Coastal Fisheries, 2017, 9: 170-189.
[32] SAYER M, WILDING T. Planning, licensing, and stakeholder consultation in an artificial reef development: the Loch Linnhe reef, a case study[J]. Ices Journal of Marine Science, 2002, 59: S178-S185.
[33] WILDING T, SAYER M. Evaluating artificial reef performance: approaches to pre-and post-deployment research[J]. ICES Journal of Marine Science, 2002, 59(suppl): S222-S230.
[34] HA H, MAA P, HOLLAND C. Acoustic density measurements of consolidating cohesive sediment beds by means of a non - intrusive “Micro - Chirp” acoustic system[J]. Geo - Marine Letters, 2010, 30(6): 585-593.
[35] BRISSON L, HILLER T. Multiphase echosounder to improve shallow-water surveys[J]. Sea Technology, 2015, 56: 10-14.
[36] PORPILHO D, KLEIN A, CAMARGO R, et al. Automatic classification of bedforms using phase differencing bathymetric sonar[J]. CEP, 2014, 88061: 600.
[37] BRISSON L, WOLFE D. Performance analysis of the EdgeTech 6205 swath bathymetric sonar[J]. 2014, 4: 1-11.
[38] 李勇航, 单晨晨, 苏明, 等. 声学水面无人艇在浅水海底地貌调查中的应用[J]. 海洋地质与第四纪地质, 2020, 40(6): 219-226. LI Yonghang, SHAN Chenchen, SU Ming, et al. Acoustic surface there is no boat in the application of shallow underwater topography survey[J]. Journal of Marine Geology and Quaternary Geology, 2020, 40(6): 219-226.
Artificial reef exploration based on Phase Differencing Bathymetric Sonar in Laizhou Bay
LIU Yu-bin1, 3, ZHANG Jian-xing1, 2, SONG Yong-dong1, 2, ZHANG Yi-han4, LUAN Zhen-dong1, 2, 3
(1. Key Laboratory of Marine Geology and Environment, Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 2. Ocean Research Center, Chinese Academy of Sciences, Qingdao 266071, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China; 4. Qingdao Marine Geological Engineering Survey Institute Co., LTD, Qingdao 266071, China)
Phase Differencing Bathymetric Sonar (PDBS), also known as Interferometric Sonar, can collect bathymetric point cloud data and dual-frequency side-scan sonar images simultaneously. It is suitable for a wide range of offshore artificial reef explorations. In this paper, Edge Tech 6205 integrated topographic and geomorphic survey equipment based on PDBS principles was used to conduct full coverage detection of a marine pasture reef casting area in an area of Laizhou Bay and to obtain high-precision bathymetric data and dual-frequency side-scan sonar images. The water depth data were calculated with topographic feature variables, and the micro-topography features of the study area were described in detail. The boundary of fish reefs was identified accurately by multi-data fusion combined with side-scan sonar images. Based on this, the spatial analysis method in the geographic information system is used to calculate and statistically evaluate the underwater physical parameters of artificial reefs. Additionally, the causes of topography and evolution patterns in the study area are discussed. Finally, it is demonstrated that the offshore artificial reefs detection technology based on PDBS has many advantages, such as high efficiency, low cost, and high precision. Results show that the water depth in the study area is between 4.1 and 7.3 m, and there is a large seabed fluctuation in the distribution area of reefs and obvious subsidence and scour around reefs. The total area of the reef accounted for 14.04% of the study area, and the total empty space was 2 528.22 m3. The height of the reef was between 1.26 and 3.63 m, with a normal distribution. This study provides data and technical support for the exploration of offshore artificial reefs and has strong practical significance.
PDBS; artificial reef; Laizhou Bay; marine ranching; multiple data fusion
Oct. 13, 2022
[Shandong Province Key Research and Development Program “Marine Ranch Biological Resources Conservation Key Technologies and equipment Research and Development and Application Demonstration”, No. 2019JZZY020708; Enterprise commissioned project “Blue Ocean Marine Ranch Terrain Survey”, No. E22225101I]
P756
A
1000-3096(2023)10-0076-11
10.11759/hykx20221013001
2022-10-13;
2022-12-14
山东省重点研发计划“海洋牧场生物资源养护关键技术与设备研发及应用示范” (2019JZZY020708); 企业委托项目“蓝色海洋海洋牧场地形扫测”(E22225101I)
刘玉斌 (1998—), 男, 山东济宁人, 硕士研究生, 主要从事基于ROV的声光融合探测技术研究, E-mail: liuyubin@qdio.ac.cn; 栾振东(1976—),通信作者, 男, 山东青岛人, 正高级工程师, 教授, 硕士生导师, 主要从事深海探测技术及海底地形地貌研究, E-mail: luan@qdio.ac.cn
(本文编辑: 康亦兼)