快速路入口区域车辆跟驰行为研究
2024-01-12葛婷华凯宗奕净胡俊艳周源
葛婷, 华凯, 宗奕净, 胡俊艳, 周源
(1.苏州科技大学土木工程学院, 苏州 215011; 2.上海市政工程设计研究总院(集团)有限公司, 上海 200092)
快速路入口区域作为城市快速路和其他道路的关键连接节点,车辆需在此范围内完成换道、加减速、合流等一系列操作,导致该区域交通运行状况复杂多变,交通冲突严重,极易发生交通事故。车辆跟驰行为是描述同一车道上不适合超车的前后两车在驾驶过程中的相互作用,是一种基础的微观驾驶行为[1]。汇入车辆在入口区域的合流操作直接影响到主线车辆的跟驰行为,致使该区域追尾事故频发。研究表明:快速路入口区域所发生的交通事故占总事故30%以上,公里事故率是其他路段的4~6倍,且追尾事故占所有事故50%以上[2-3]。
近些年,基于不同理念的跟驰行为研究及建模层出不穷。张兰芳等[1]采用高仿真多自由度模拟驾驶的手段获取车辆轨迹数据,结合数据驱动类车辆跟驰模型从微观层面入手,对地下快速路环境下的跟驰行为进行分析与建模。王博[4]基于跟驰理论,结合实际驾驶员驾驶行为特征,提出了与速度相关的动态敏感系数函数,构建了考虑动态敏感系数的跟驰模型,并进行了稳定性分析及数值模拟。王健等[5]利用粒子群优化的模糊聚类算法,从车速稳定性、跟驰行为倾向性和横向位置稳定性3方面对跟驰行为特征进行聚类分析,深入分析合流区不同车道跟驰行为存在的差异性。徐进等[6]通过725条有效跟驰轨迹数据,明确了车头时距和车头间距的分布特征,并且对不同跟驰状态和驾驶人性别差异下的跟驰数据进行了分析。洪家乐等[7]基于车头间距反馈构建了考虑驾驶员特性的改进车辆跟驰模型,采用数值仿真方法验证了驾驶员在跟驰中对于车间距的反应强度的影响。魏福禄等[8]采用一种基于GPS的实时动态车辆跟驰数据采集方法获取了大量城市信号交叉口左转车辆跟驰数据,解析了信号交叉口左转车辆跟驰特性及其关键影响因素。宗芳等[9]分析了不同类型车辆跟驰行为特性,构建了一种适用于多类型车辆的跟驰模型,通过稳定性分析和数值仿真验证模型的有效性。Ren[10]在现有交通轨迹数据的基础上,采用合适的神经网络构建汽车跟随模型,进而对驾驶员的汽车跟随行为进行分析和研究。Wang等[11]提出了一种基于MPC算法的个性化跟驰模型,该模型能够有效解决约束条件下的多目标优化问题。
快速路入口区域复杂的交通流和道路条件,使得各车道驾驶员受到不同的干扰,从而导致各车道的跟驰行为有所不同。然而目前大多数跟驰研究均集中在基本路段上,对快速路入口区域的研究较为有限,因此有必要对快速路入口区域的跟驰行为展开研究。
现采用无人机对快速路入口区域进行航拍以获取车辆跟驰轨迹数据,从跟驰车辆的跟驰速度、跟驰距离和不同交通流下的跟驰行为差异三个维度,对快速路入口区域车辆跟驰行为进行分析和判定;并探讨了快速路入口区域车辆跟驰速度和跟驰距离随交通流的变化规律以及不同车道车辆跟驰距离的差异。通过对入口区域车辆跟驰行为的研究,进一步明确快速路入口区域驾驶行为特性,为改善入口区域提供依据。
1 数据采集与提取
1.1 数据的采集
基于快速路入口设计实验[12]和已有研究成果,本文研究所采集数据的地点需包含入口匝道上游200 m至下游100 m范围,全长近300 m。采用大疆无人机御mavic air 2在200 m高空对目标区域通行车辆进行悬停定点拍摄,如图1所示。该无人机设备搭载了1/2英寸CMOS传感器,可拍摄4 800万像素照片、4 K/60 fps视频及8 K移动延时视频,长达34 min的续航时间,同时气动性更好。

图1 快速路入口区域示意图Fig.1 Schematicdiagram of expressway entrance area
采集时间选择天气状况良好,无风和雨雪天气情况下的15:30-17:30时段进行调查,包含了平峰和高峰时段。
采集地点为苏州友新立交和劳动路入口区域,友新立交入口区域是平行式入口,劳动路入口区域后期管控后近似直接式入口,各入口几何构造如下图所示,线形平直,通视条件好,满足试验要求。
1.2 数据的提取
采用Tracker软件对航拍的视频进行数据提取,先通过实测数据在Tracker软件中对航拍视频进行严格的尺寸标定,并在视频图像中设置坐标参考系以计算车辆位置。为了便于后续分析,坐标轴交点建立在合流鼻端,X轴位于加速车道和主线外侧车道分界线上,Y轴垂直于车道的中心线。使用定标尺进行比例校准以主线车道线6 m进行标定;每5帧记录一次车辆的位置。软件自动追踪目标车辆,提取的数据包括每辆车编号、行驶轨迹坐标、时间、速度、加速度,最后对提取的数据进行平滑处理,保证数据的有效性。
2 跟驰行为分析及判定
2.1 跟驰行为提取准则
根据李林波等[13]提出的跟驰行为准则:跟驰片段需要持续15 s及以上。通过此准则初步筛选出277个跟驰样本,每对跟车数据包括时间以及该时刻前后车的位置坐标、速度等信息。提取的跟驰样本数据如表1所示。以车辆跟驰距离、相对跟驰速度绝对值和跟驰片段长度作为跟驰行为判定指标,对这些跟驰样本进行进一步分析,以此确定快速路入口区域的跟驰行为准则。

表1 不同地点跟驰样本数据表Table 1 Car-following sample at different locations
2.2 跟驰距离分布特性
跟驰距离是指跟驰状态下前后车的车头间距。对快速路入口区域车辆跟驰距离进行描述性分析,结果如图2和表2所示。可知快速路入口区域处于跟驰状态的车辆的跟驰距离集中分布在15~30 m,占到总样本数的80%,其中20~25 m占比最多。此时的跟驰距离分布图近似对数正态分布,平均跟驰距离在26 m。

表2 车辆跟驰距离描述统计Table 2 Description and statistics of car following distance

图2 跟驰距离分布图Fig.2 Distribution of car following distance
2.3 跟驰车辆相对跟驰速度绝对值分布特性
相对跟驰速度是指跟驰状态下前后车速度的差值。图3和表3为快速路入口区域跟驰车辆相对跟驰速度绝对值的描述结果。可知车辆的相对跟驰速度绝对值集中分布在0~1 m/s,分布曲线属于指数分布;跟驰状态下的前后车速度较为接近,平均相对跟驰速度绝对值为0.75 m/s。

表3 相对跟驰速度绝对值描述分析Table 3 Description andanalysis of absolute value of vehicle relative following speed

图3 相对跟驰速度绝对值分布图Fig.3 Distribution of absolute value of relative car following speed
2.4 分布特性拟合性检验
跟驰距离和相对跟驰速度绝对值是跟驰特性研究的重要指标。对快速路入口区域跟驰样本数据处理可知跟驰距离服从对数正态分布,相对跟驰速度绝对值服从指数分布。为了检验样本数据分布的可靠性,采K-S检验法(Kolmogorov-Smirnov test)对跟驰距离和相对跟驰速度绝对值两个指标进行拟合性检验,K-S检验结果如表4所示。由表4可知,两组数据的显著性(P值)均大于0.05,即快速路入口区域跟驰距离服从对数正态分布,相对跟驰速度绝对值服从指数分布。

表4 K-S检验结果Table 4 Kolmogorov-Smirnov testresults
2.5 最终跟驰行为准则判定
目前关于跟驰行为准则判定的方法主要集中在对跟驰行为中的自车速度、与前车纵向距离、相对速度绝对值、跟驰片段时间长度、侧向距离绝对值等参数进行限制。Leblanc等[14]确定跟驰提取准则为自车速度大于40 km/h,相对速度绝对值小于2.0 m/s,片段长度大于15 s。Chong等[15]确定跟驰片段提取准则为侧向距离绝对值小于1.9 m,自车速度大于20 km/h,纵向距离小于120 m,片段长度大于30 s。王雪松等[16]确定跟驰片段提取准则为侧向距离绝对值小于3.5 m,纵向距离大于7 m且小于150 m,相对跟驰速度绝对值小于2.5 m/s,片段长度大于15 s。再结合本文对初步跟驰状态下的277个样本进行数据分析和处理,对跟驰距离和相对跟驰速度绝对值进行描述分析,得出跟驰距离的最大值为75 m,相对跟驰速度绝对值90%集中分布在小于1 m/s的区间内。综上确定快速路入口区域最终的跟驰行为准则如表5所示,即纵向距离小于75 m,相对跟驰速度绝对值小于1.5 m/s,片段长度大于15 s。

表5 已有研究中跟驰片段提取准则Table 5 Car following segment extraction criteria in previous studies
3 快速路入口区域跟驰行为影响分析
3.1 交通流变化对跟驰行为影响
通过对筛选出的跟驰样本进行交通流划分,以跟驰距离和后车跟驰速度作为跟驰行为表征指标,分析其随交通流变化的分布特性,结果如图4所示。由2.5节可知跟驰状态的判定准则,当道路处于二、三、四级服务水平时,分析发现此时均有符合跟驰状态的车辆,故进行跟驰行为分析。
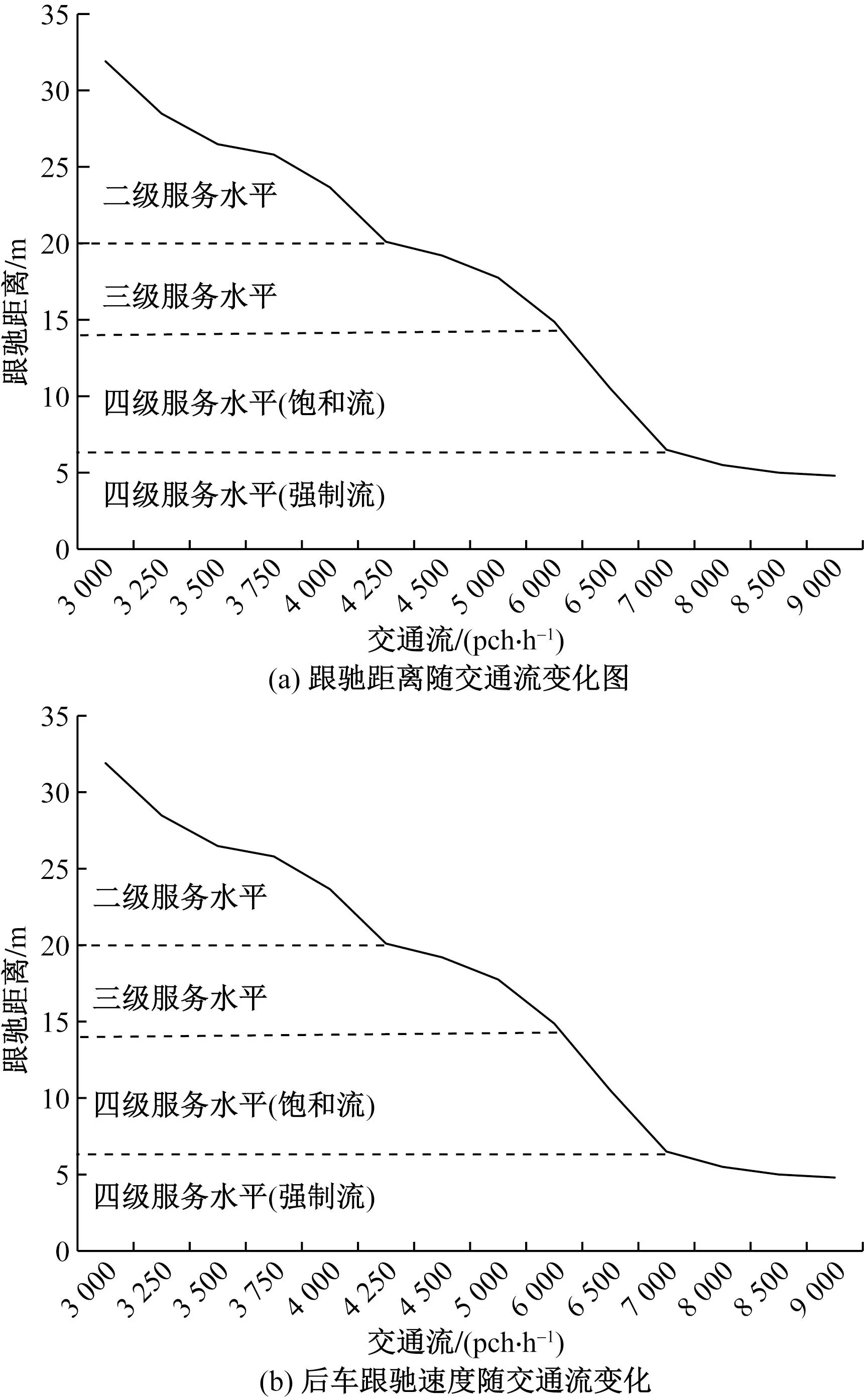
图4 跟驰行为随交通流变化图Fig.4 Variation of car following behavior with traffic volume
由图4可知不同交通流状态下的跟驰行为参数存在显著差异。快速路入口区域大部分车辆跟驰距离集中分布在40 m以内;当处于二级道路服务水平时,此时跟驰距离大于20 m;道路处于三级服务水平,跟驰距离在14~20 m;当道路处于四级服务水平,跟驰距离小于14 m,且在四级服务水平强制流时趋于稳定,此时最小跟驰距离为7 m。
后车跟驰速度总体呈现随交通流的增大而逐渐减小的趋势。当道路处于二级服务水平时,后车跟驰速度在58~70 km/h;三级服务水平时,跟驰速度减小的较快;当达到四级服务水平,后车跟驰速度小于35 km/h,且在强制流时趋于稳定,此时后车跟驰速度保持在20~25 km/h。
3.2 跟驰距离对后车跟驰速度的影响分析
由图5可知,后车跟驰速度会随着前后车跟驰距离的减小而降低,当跟驰距离为27 m时,后车跟驰速度保持在65~67 km/h;当跟驰距离为20 m时,后车跟驰速度保持在48~58 km/h;当跟驰距离为5 m时,此时跟驰距离趋于稳定,后车跟驰速度小于25 km/h。

图5 后车跟驰速度随跟驰距离变化图Fig.5 Variation of the following speed of the rear vehicle with the following distance
3.3 主线车道分布对跟驰行为影响
快速路入口区域最内侧车道和中间车道的跟驰距离和后车跟驰速度统计结果如图6所示。可知交通流稳定条件下,最内侧车道的前后车辆跟驰距离要明显大于中间车道,最内侧车道的跟驰距离在28 m左右,而中间车道的跟驰距离在23 m左右;主线最内侧车道的后车跟驰速度要大于中间车道的跟驰速度,由数据可知最内侧车道的平均跟驰速度为50 km/h,中间车道的平均跟驰速度为48 km/h。最内侧车道属于较快车速车道且入口匝道车辆对最内侧车道的影响最小,车辆汇入会对中间车道的跟驰距离和跟驰速度产生影响,从而使最内侧车道的车辆跟驰距离和跟驰速度都要大于中间车道。

图6 跟驰行为随主线车道变化图Fig.6 Change of car following behavior with the main line lane
3.4 入口形式对主线车辆跟驰行为影响
本文研究所调查快速路入口区域形式可分为平行式(友新立交)和直接式(劳动路),对两种入口形式对主线车辆跟驰行为的影响进行对比分析,结果如图7所示。

图7 跟驰行为随入口形式变化图Fig.7 Change of car following behavior with entrance form
从图7可知:在交通流稳定时,直接式入口的平均跟驰距离为28.8 m,平行式入口的平均跟驰距离为24 m,直接式入口跟驰距离要大于平行式入口;直接式入口的平均后车跟驰速度为67 km/h,平行式入口的平均跟驰速度为58 km/h,直接式入口的跟驰速度要大于平行式入口。在拍摄的300 m区域内,平行式入口区域车辆对主线车道车辆的跟驰距离和跟驰速度影响要明显大于直接式入口,从而导致主线车道车辆的跟驰状态提前结束。
4 结论
(1)对快速路入口区域车辆跟驰距离和相对跟驰速度绝对值进行分析,发现跟驰距离的平均值为26 m,最大值为75 m,80%车辆跟驰距离集中分布在15~28 m;相对跟驰速度绝对值平均值为0.75 m/s,90%车辆相对跟驰速度绝对值小于1 m/s;在此基础上,确定了快速路入口区域跟驰行为判定准则。
(2)通过对不同交通流下快速路入口区域车辆跟驰行为的分析,得出车辆的跟驰距离及后车跟驰速度随交通流的增加而减小,并在道路处于四级服务水平强制流时,跟驰距离和跟驰速度趋于稳定状态;且后车跟驰速度会随着跟驰距离减小而降低,跟驰速度小于25 km/h时,跟驰距离趋于稳定。
(3)分析了主线车道分布和入口形式对跟驰行为的影响。研究发现稳定交通流下快速路入口区域最内侧车道的跟驰距离和后车跟驰速度要大于中间车道,直接式入口的主线车道车辆跟驰距离和跟驰速度大于平行式入口。
(4)受限于数据获取方式,本文研究对快速路入口区域的跟驰行为研究还不够全面,后续应补充更加完整的交通事故数据并完善其他车辆的跟驰及换道行为,以量化此区域内特殊的交通流特性与交通事故风险的内在联系。
