基于数字孪生技术的危化品车辆运输路径优化方法
2024-01-12张凯月温海骏陈跃鹏孟华严巨雨亭
张凯月, 温海骏*, 陈跃鹏, 孟华严, 巨雨亭
(1.中北大学机械工程学院, 太原 030051; 2.先进制造技术山西省重点实验室, 太原 030051)
危化品具有腐蚀、毒害、爆炸等性质,在运输过程中由于运输路线规划不合理或安全监管力度不足等原因发生事故,对人体或周边环境易造成严重危害[1-2],成为制约合规利用危化品促进社会经济发展的关键因素。因此,制定合理的危化品运输车辆调度方案变得至关重要。
危化品车辆调度问题本质上属于车辆路径规划问题(vehicle routing problem,VRP),目前中外针对车辆路径问题的衍生问题有大量研究。Zhang等[3]、Jose等[4]和Islam等[5]运用了遗传算法或蚁群算法求解带时间窗的VRP问题。李魁梅等[6]采用混合蝙蝠算法求解带车辆载重量约束的多式联运车辆路径优化模型。危化品路径问题作为VRP问题的重要一项,很多学者也对此类问题做过相关研究。郭硕等[7]结合概率语言平均解距离评价法,对危化品道路运输路径决策问题进行了求解。李树民[8]用深度遍历搜索算法与非支配排序算法,求解了降低运输事故风险和成本双目标的危险货物运输路径优化问题。范杰[9]将可靠性选址与路径优化问题结合,解决了危化品物流系统中储存和运输环节的风险和成本控制问题。
现有文献主要集中于建立固定风险模型并结合启发式算法实现危化品车辆路径规划研究,针对危化品路径问题的研究中考虑实时性动态信息因素较少,且一般未充分结合新兴电子信息技术实现对动态信息数据的获取。由于危化品物流运输介质的特殊性和风险管控难度大的特点,危化品物流的特殊性主要表现在企业运输许可、运输车辆和驾驶人员的专门要求两方面。因此现将数字孪生技术融于不确定性因素下多目标优化的危化品运输车辆路径问题研究,动态获取驾驶员疲劳状态预警及车辆故障预警的实时数据与调度方案进行交互融合,降低货物配送的成本及发生风险概率。
1 数字孪生驱动下危化品物流配送系统框架构建
1.1 基于数字孪生的联动信息构架
数字孪生技术在车间管控[10-11]、产品制造工艺[12-13]以及装备管理[14-15]等方面应用的研究较多。基于数字孪生的危化品车辆调度系统,主要是在孪生数据的驱动下,先对危化品物流运输物理空间中的数据信息,根据需求与约束进行提前储存与分析计算。虚拟空间针对数据模型制定初始车辆调度计划,并实时接收动态数据,从而实现虚拟模型在动态性干扰的作用下结合优化算法对调度方案进行不断优化仿真。如图1所示。
1.2 系统体系架构设计
基于以上联动信息架构运行机制,提出了基于数字孪生技术的危化品物流配送系统整体框架,分为物理层、服务层、模型层、运维服务层4个层次,如图2所示。

图2 危化品物流配送系统数字孪生框架Fig.2 Digital twin framework of hazardous chemicals logistics distribution system
(1)物理层。该层负责接收危化品车辆调度系统指令,并获取运输车辆危险驾驶物理信息。依据主动安全智能防控系统的疲劳监测系统(driver status monitor, DSM)获取驾驶员疲劳状态视频图像,也可通过汽车自诊断(on-board diagnostics, OBD)系统,应用基于控制局域网总线(controller area network, CAN)的相关协议,通过OBD检测仪获取车主驾驶行为习惯、车辆故障信息码及油耗、车速等关键信息,实现对车辆驾驶情况进行实时监管。
(2)服务层。该层利用孪生数据采集模块与5G通信技术实现运维服务层和物理层之间的数据采集和传输。
(3)模型层。该层通过对危化品车辆配送过程中采集的数据结合路径规划算法,对危化品车辆调度方案进行实时动态调整和优化。为基于数字孪生技术的配送管理提供动态数字孪生模型。
(4)运维服务层。该层其他三层的基础上,通过前端应用设计交互界面,实现对危化品车辆调度系统的数据表示与处理、信息管理与接收以及配送场景虚拟映射的数字可视化功能,并对物理层进行实时交互反馈与控制。
2 问题描述与数学建模
2.1 问题描述
基于数字孪生技术,考虑危化品运输过程中驾驶员疲劳状态及车辆故障等多种动态危险因素的时变性,构建在运输时间窗的约束下,以运输成本最小为目标的危化品运输动态决策模型。
针对所研究的问题,做出以下假设。
(1)每辆车仅配送于一条路径,且要保证配送初始点和结束点都是配送中心。
(2)每辆车可经过多个客户点,每个客户点只能被一辆车经过。
(3)危化品运输车辆类型单一。
(4)每辆车服务其路径上的每个客户时,应在客户规定的时间窗内到达配送地点,或早或晚都将面临惩罚。
(5)所有的危化品运输车辆在行驶过程中速度恒定且相同,不考虑行驶过程中道路拥堵等影响因素。
(5)配送中心和客户点的位置坐标为已知。
(6)客户点的服务时长,最早、最晚服务时间点及货物需求量已知。
2.1.1 运输成本

(1)

当系统监测到司机疲劳驾驶或车辆故障等信息后,此时车辆在运输过程中发生事故的概率会随着行驶距离的增加而增加,将司机疲劳驾驶危险度系数设为ρ1,将车辆故障危险度系数设为ρ2,为方便计算,取ρ1=ρ2,综合表示为危险度系数ρ取值1.5。且风险成本与车辆行驶里程成正比。
车辆固定成本主要包括车辆行驶油耗成本以及车辆累计损耗、相关车辆监测设施装备及相关软件系统的损耗,其中油耗成本与行驶里程成正比。
2.1.2 惩罚成本
(2)

(3)

根据以上分析建立数学模型为
minT=min(T1+T2)
(4)
s.t.
(5)
(6)
(7)
(8)
(9)
(10)
EETi≤tik≤ELTi
(11)
(12)
(13)
(14)
式中:T为总成本。
式(5)表示配送初始点和结束点都是配送中心;式(6)~式(8)表示货车k在路径上的流量限制;式(9)表示每辆车所承载的货物总量qi不应超过车辆的载重量Q;式(10)表示车辆k行驶时间不间断,其中si为客户i的服务时长,wi为从节点i到j的路程消耗时间,M为足够大的正数;式(11)表示车辆的到达时间必须在客户i规定的最早和最晚时间窗范围内;式(12)为二值变量,值取1时表示车辆k由客户i行驶到客户j;式(13)为二值变量,值取1时表示车辆k服务客户i;式(14)为二值变量,取值1时表示车辆k完成了客户i的服务。
2.2 算法内核设计
基于数字孪生技术的危化品物流配送系统相比于传统物流配送调度系统,增添了运维服务层和物理层之间的数据驱动反馈,使选择的算法内核根据物理层实时获取的物理信息和运维服务层的数据交互,实现对危化品车辆状态信息进行实时把握和动态调整。本文研究选择遗传算法作为算法内核对危化品物流配送调度问题进行求解,遗传算法流程如图3所示。
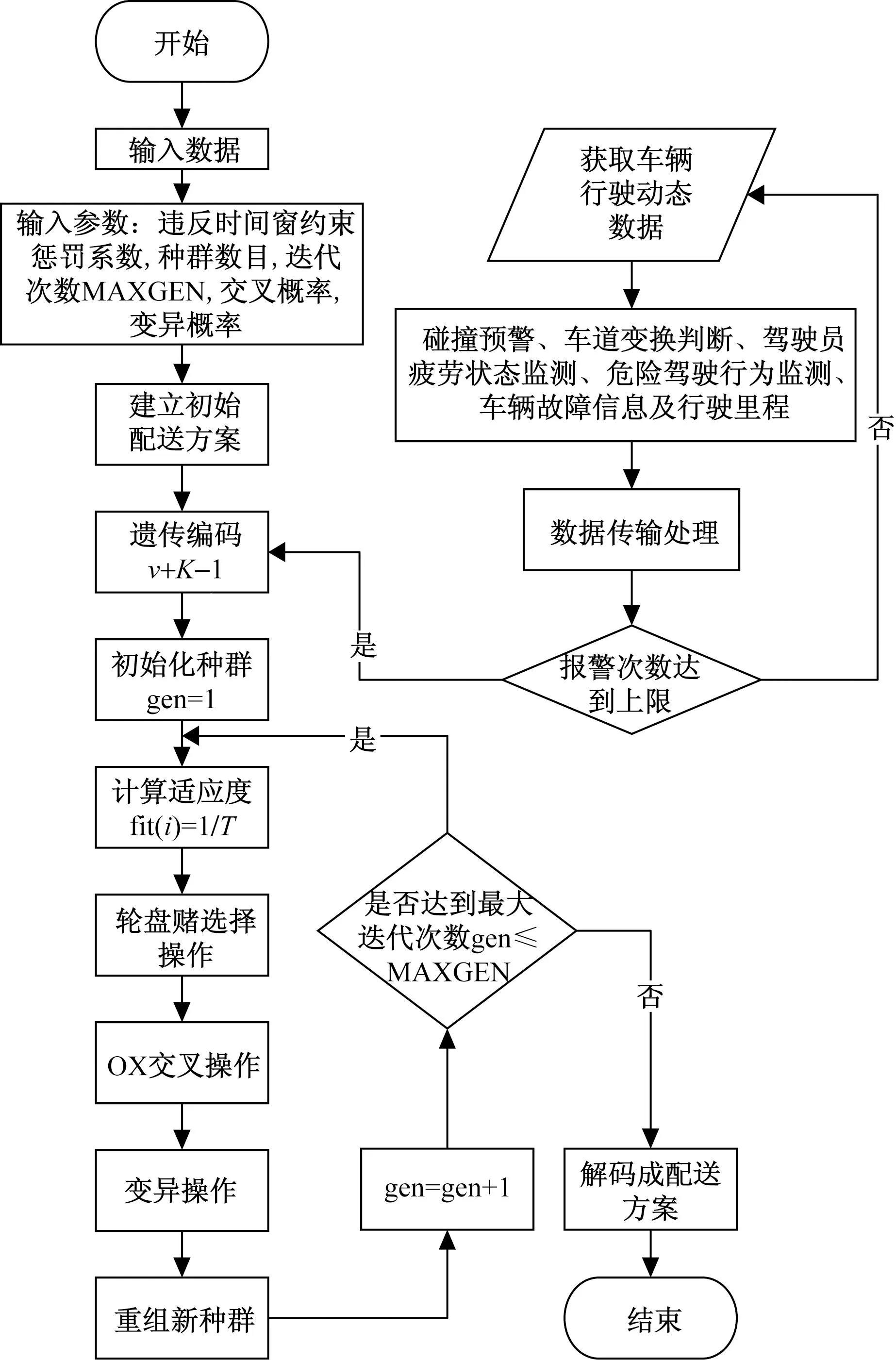
图3 遗传算法协调逻辑Fig.3 Genetic algorithm coordination logic
(1)编码。选用一种传统编码方式--自然数编码,染色体长度设为v+K-1,v表示客户点数量,K为配送车辆总数。配送中心编码为0,编码1~n代表各个客户点。
(2)解码。将客户点按任意顺序排列,qi代表染色体中第i个客户点的需求总量。如果承载货物总量没有超过车辆最大载重,则判断时间窗约束插入客户点,否则增派车辆,遍历剩余客户点。
(3)适应度函数。根据本文研究的问题,需要在进行选择操作时判断适应度值大的个体并将其选择,所以取综合配送成本倒数作为染色体适应度函数,即fit(i)=1/T。
(4)个体选择。选用轮盘赌选择法,通过判断适应度值的大小来选取综合配送成本更低的个体进行后续操作。
(5)交叉。使用OX交叉的方式,在两个父代染色体中任意选择a、b两点,将两点间的片段确定为交叉片段。将两个父代染色体的交叉片段分别移动到另一条父代染色体的前面,按照从前到后的顺序删除第2个重复基因位,从而形成两个子代染色体。
(6)变异。随机选择两个变异位置,互换后重新判断该个体是否满足约束条件。
根据数字孪生技术,改变传统车辆调度方案中固定的客户服务时间,根据危化品车辆故障信息以及驾驶员疲劳报警信息的数据上报,经系统判断报警次数达到上限后,车辆在到达客户点后可动态选择在客户点的服务时间。例如,客户服务时间为[50,100],若选择服务时间为50 min,则说明车辆行驶状态正常,选择了固定装卸货物的时间;若选择区间范围内的值,则说明驾驶员根据需要自行选择了服务时间;若选择服务时间100 min,则说明根据系统提醒强制选择了最长的服务时间用于驾驶员休整以及车辆故障维修,从而对初始调度方案中客户服务顺序做出改变,生成新的路径规划方案,如图4所示。

图4 配送路线Fig.4 Delivery route
3 实验与验证
假设某配送中心有危化品运输车辆10辆,针对区域内25个配送点建立基于数字孪生技术的危化品车辆配送方案,配送模型相关参数设定如表1所示,客户坐标、需求量、时间窗、客户动态服务时间及选择的服务时间等信息如表2所示,每个客户服务时间可根据系统报警提醒进行动态选择区间范围内服务时间。

表1 物流配送模型参数设定Table 1 Parameter setting of logistics distribution model

表2 客户点坐标、需求量、时间窗及动态服务时间Table 2 Customer point coordinates, demand, time window and dynamic service time
初始种群数为100,交叉概率0.9,变异概率为0.05,经过1 000次迭代之后得出,基于数字孪生技术的车辆调度方案如下。
配送路线1:0-1-2-15-12-13-22-8-19-16-3-0;配送路线2:0-4-21-9-25-17-18-5-0;配送路线3:0-6-7-14-23-24-10-11-20-0。
其中第1、3条路线的危化品运输车辆在经过第22、7顾客后,基于数字孪生技术的车辆监控系统检测到了车辆发生多次危险驾驶警告,经过系统提醒在客户点8、14处强制选择最长服务时间进行了车辆维修或驾驶员休整,导致其后续客户服务顺序发生改变。第1、2条路线的危化品运输车辆在经过第19、17客户点时根据需要在普通装卸货物需要的时间基础上自行增加了10 min的服务时间,但并未对其原始路径规划方案产生变动。其实际路线方案如图5所示。
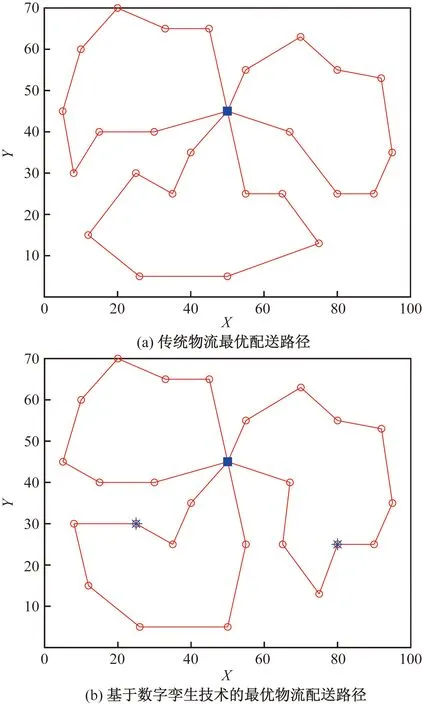
图5 最优配送路径Fig.5 Optimal delivery route
经分析,传统物流配送车辆调度方案中总成本为22 290元,基于数字孪生技术的车辆调度方案中总成本为21 909元,其中事故风险成本为1 789元,由于危化品配送车辆经过了车辆维修及驾驶员休整,不仅降低了危化品运输过程中发生风险的概率,还在一定程度上降低了发生事故后对企业及社会的损失成本。所以减免配送过程中的事故风险成本后的总成本为20 120元,基于数字孪生优化仿真方法得到的物流配送总成本比在传统优化仿真方法下的物流配送总成本降低了9.73%。
4 结论
危化品运输环节中的发生事故不仅会对企业造成严重损失,还会引发重大人员伤亡事故,并且对周边生态环境也会造成严重污染与破坏。
(1)结合危化品物流配送系统数字孪生框架,实现对危化品配送过程中的时变物理信息动态掌握。
(2)通过仿真分析,验证了基于数字孪生技术的危化品车辆调度方案可以根据动态不安全信息调整路径优化方案。
(3)本文方法不仅使危化品在运输过程中的配送总成本降低了9.73%。同时由于在一定程度上降低了危险品在运输过程中发生事故的概率,对事故后续可能产生的生态影响也有一定程度的减轻。
