可用于天空偏振场导航的超分辨光学相机
2024-01-12姚东张飞舟晏春回张子晗秦鑫李延飞
姚东,张飞舟,晏春回,张子晗,秦鑫,李延飞
( 1. 中国科学院长春光学精密机械与物理研究所, 长春 130033;2. 北京大学空间信息集成与3S 应用北京市重点实验室, 北京 100871;3. 中国科学院航空光学成像与测量重点实验室, 长春 130033;4. 中国科学院大学研究生院, 北京 100864 )
0 引言
太阳光在进入大气层之前被认为是非偏振的,大气层中存有各种大气分子,如N2、O2、CO2、CO、各类稀有气体以及气溶胶粒子. 光是一种电磁波,当太阳光穿透大气层时,光线受到上述分子、粒子的作用,进而产生散射、吸收、反射、折射等光学现象,到达地表后的光子产生了偏振效应. 然而,这种偏振信息并非均匀分布于天空,而是随着由太阳位置、观测位置与方向、大气成分以及气溶胶条件的不同而变化. 偏振导航的目的在于确定观测者的位置和方向,在上述因素中,太阳位置的变化规律是明确的、大气成分以及气溶胶条件被认为是稳定的,因此在观测者看来,天空偏振特征的变化规律被认为是已知的,天空的偏振图像分布符合瑞利散射偏振理论,观察者可以利用对天空偏振特征的观测,实现对自身的定位.
例如,多种昆虫都进化出了感知天空偏振光方位角并将其用于导航的奇异能力,以帮助其完成觅食、归巢及迁徙等行为[1-3]. 人类的自身器官不具备感知偏振特性能力,但是,随着偏振感知芯片的出现,人类同样可以借助偏振探测器件感知周围环境的偏振信息,这为天空偏振光场导航带来了技术上的可行性.
近年来,有众多的学者开展地球天空偏振场导航研究. 1997 年,Lambrinos 等利用多个光电二极管阵列研制了偏振光传感器,可以获取不同方向的线偏光,计算天空偏振光的空间分布特征,用于定位导航[4].1999 年,Labhart 等仿照昆虫的偏振光敏感神经元,研制出基于光电传感器的天空偏振光导航装置[5].2000 年,Lambrinos 等学者受到昆虫偏振导航行为的启发,提出了路径整合和视觉导航机制,并成功应用于移动机器人Sahabot 2[6]. 2010 年,澳大利亚Chahl等研究学者参考蜻蜓的偏振光导航方式,发明了偏振光导航传感器[7]. 该导航传感器利用三个独立敏感单元感知天空中的偏振光空间分布特征,并成功应用于无人机的航向角测量. 2012 年Karman 等提出仿生偏振导航是新型导航系统的研究发展方向[8],模仿生物自主导航机制研制出了偏振导航传感器. 2014 年,Barta 等使用全天空成像偏振仪测量了多个谱段的偏振特征分布,揭示了动物定向和维京人基于天空偏振导航的背后原因[9]. 2017 年,Hamaoui 等提出了一种基于梯度的天空偏振导航技术,从天空偏振图像中恢复了太阳方位角和仰角[10]. 2019 年,Gkanias 等给出了昆虫从天空偏振光场输入到行为输出的计算模型,研究了在天空偏振模式和昆虫眼传感器阵列的现实限制下,昆虫大脑如何可靠地计算出这些方向信息[11].2019 年,Eshelman 等首次利用偏振成像仪器记录了日出到日落过程中的天空斯托克斯矢量S1和S2以及偏振度,详细描述了天空偏振模式在一天中的变化情况[12]. 2022 年,该团队设计了一款天空偏振成像仪器,利用大气偏振模式来寻找高度准确的航向[13].
在国内,2008 年至今,北京大学晏磊等学者深入研究了全天空偏振光的空间分布特性[14],提出了利用天空中偏振光的空间分布特征进行导航的初步模型[15]. 大连理工大学团队在2012 年发明了六通道偏振角传感器[16]. 经过多年的技术更新,目前已经完成了三代仿生偏振导航偏振光测角仪器[17]. 2012 年,合肥工业大学高隽等采用电场矢量描述光波,研究微观粒子对自然光电场矢量振动方向变化,得到散射光的偏振强度和偏振主方向[18]. 同年,合肥工业大学高付民等设计了探测天空偏振光方向信息的光电测试系统,实验证明了仿生偏振导航的可行性和光电测试系统设计的有效性[19]. 2013 年,王波等提出了一种基于高阶多项式拟合的航向角处理方法,解决了POL-神经元模型中存在的航向角歧义性问题,并可显著提高模型的测角范围[20]. 2015 年,中北大学任建斌等提出一种基于Rayleigh 大气偏振模式的太阳和太阳子午线空间位置的计算方法,重建了理论和实测大气偏振模式[21]. 2016 年国防科技大学王玉杰等设计了一款偏振视觉传感器,分析了基于一阶瑞利散射模型的天空光偏振模式,研究结果揭示了生物偏振光导航的机理[22]. 2016 年,中北大学Tang 等提出了一种基于脉冲耦合神经网络(pulse coupled neural network,PCNN)算法的偏振天光成像罗盘信息计算新方法,适用于云层、树木和建筑物遮挡以及弱偏振信息源(如月光)等复杂场景[23]. 2019 年,国防科技大学张文静等提出一种基于微偏振阵列成像的实时天空偏振光导航方法,实验证明航向获取精度优于0.1°[24]. 2019 年,中北大学Tang 等提出了一种三通道偏振成像相机,由三个配有鱼眼镜头的微型TFT-LCD 光学相机组成,使结构更紧凑,并且获得了较高精度的太阳高度角和方位角[25]. 2021 年,大连理工大学蔡弘等研究了基于深度学习的多云天空偏振场方向特征识别方法,并通过实验验证了该方法在天空偏振导航的实际定向应用中具有较好的可行性和较高的鲁棒性[26].2022 年,北京理工大学李宇阳等提出一种基于局部大气修复的偏振导航方法,该算法能适应视野内部分遮挡环境,去除视野中的随机遮挡,恢复图像细节信息[27].
传统导航主要基于GNSS 和磁力场,然而在极端的磁场条件下,如地球南北极,基于磁力场导航的方式将受到重大的冲击,这为平台到达目的地带来了技术挑战和安全风险. 然而,天空偏振场导航却是一个不依赖于磁场的可用方式,相对稳定的大气层分布和确定的太阳高度角为天空偏振场导航带来了技术可行性.
但是,目前对偏振场的观测设备尚未统一,缺少一款高精度、轻小化的偏振成像相机. 因此,对偏振场的观测设备开展设计研究,设计一款即可以用于偏振成像,又能满足天空偏振场导航要求的偏振相机是一个明确的需求. 基于这种偏振相机,开展后续的偏振试验,使得后续试验具有相同的数据形式和质量有重要的研究意义. 本文针对这一需求,围绕分焦平面偏振探测芯片,开发了一款可用于天光偏振场导航的超分辨偏振成像系统. 展示了设计效果,同时给出了超分辨标定过程和偏振信息获取数据,并对比分析了超分辨前后的成像效果. 本项工作为后续天空偏振光场导航和成像提供了新思路.
1 光量子偏振参量的基本描述
1809 年,法国天文学家Arago 第一次观测到了天空中的偏振光现象,随后不久,他在天空中观测到一个偏振度为零的点,也就是大气偏振中性点(Neutral point),现在学界将这一个中性点称为Arago中性点[28].
最初,法国物理学家Malus 于1808 年发现偏振现象,确定偏振光强度的变化规律,用 Polarization 来描述光的这一种偏振特性,首次给出偏振光强的定量化公式,现被称为马吕斯定律[29],自此拉开了偏振光方面研究的帷幕.
偏振与强度、频率和相位共同构成光量子的四个基本物理量.
偏振光的状态描述有电矢分量、琼斯矢量、斯托克斯矢量以及邦加球作图等方法(实际上斯托克斯矢量与邦加球作图法是统一的),这四种表示方法各有优缺点,在偏振信息测量的实际应用中选择相应的方法可以简化计算过程. 其中,电矢分量适合单个光学器件中偏振信息的分析和计算. 这里简单介绍前三种偏振描述方法.
1.1 电矢分量方法
电矢分量偏振态描述方法以经典波动理论为基础,在迪卡尔坐标系里,设一束单色平面偏振波沿轴传播,其三个电矢分量为:
式中:A、B为振幅; δx、 δy为Ex、Ey电失分量的初相位;k为波矢大小; ω 为时间角频率.
通常情况下,合成电矢量末端的轨迹在数学上可以表示为一椭圆,即
由式(2)可知,该矢量的运动轨迹是一个矩形的内接椭圆,该矩形在x方向和y方向分别取值A、B,如图1 所示.
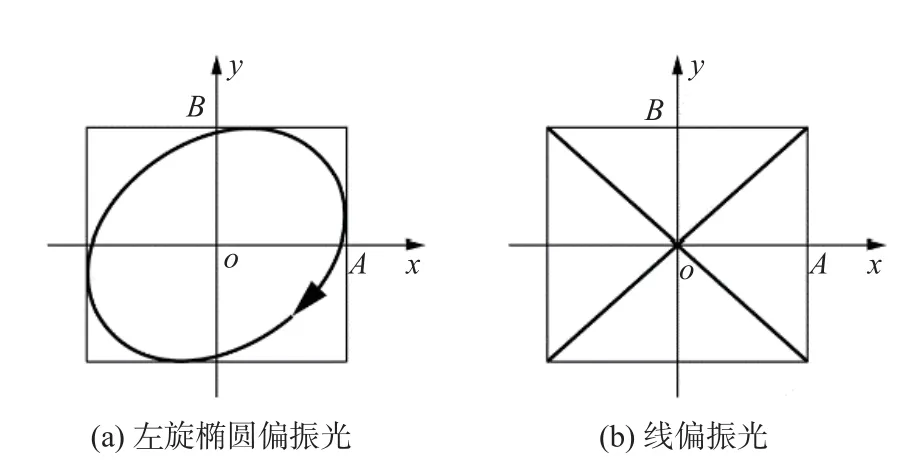
图1 椭圆偏振光和线偏振光
根据方程(2)的数学表达式,当 δ=0 和 π 时,为线偏振光运动轨迹;当 δ=π/2 时,为圆偏振光运动轨迹. δ 的取值范围在 0 <δ ≤π 时,矢量运动轨迹为左旋,即矢量轨迹的运动方向与光的传播方向形成左手螺旋关系; δ 的取值范围在 -π <δ ≤0 时,矢量运动轨迹为右旋,即矢量轨迹的运动方向与光的传播方向形成右手螺旋关系. 综上所述,可以根据矢量的振幅A、B以及相位差 δ 三个参数的大小确定运动轨迹的形状和方向,最终得到矢量的偏振态信息.
1.2 琼斯矢量方法
1941 年Jones 首先提出琼斯矢量方法来表示光的偏振态信息. 琼斯矢量利用包含复振幅分量的二元矢量矩阵来描述光传播方向的偏振态,其定义为
式中, δ=δy-δx为两个矢量分量的相位差. 相位差δ的取值范围在[ -π,π ]. 略去系数ei(ωt-kz)eiδx,一束偏振光就可以描述为琼斯矢量
光强I可由下式求出
归一化的琼斯矢量可以表示为
归一化强度为单位1. 当相位差 δ=±nπ 时,琼斯矢量表示为线偏振光;相位差 δ=±(2n+1)π/2 时,琼斯矢量表示为圆偏振光. 当振幅A和振幅B相等且n为自然数时,琼斯矢量的线偏振光和圆偏振光的归一化表示分别为和. 其中,-i表示右旋圆偏振光, +i表示左旋圆偏振光.
1.3 斯托克斯矢量表示法
1852 年,英国物理学家Stokes 提出一种新的偏振光表示方法,该方法被学者称为斯托克斯矢量表示方法(Stokes 矢量). 该矢量既可以表示完全偏振光,也可以表示部分偏振光.
Stokes 矢量包含四个参数,可以通过矩阵表示
以S0、S1、S2、S3为标记的四个斯托克斯参数定义为(R.M.A.阿查姆等,1956;新谷隆一等,1994):
式中:Ex、Ey分别为电矢量在x方向和y方向的分量; δ 为x方向分量和y方向分量的相位差;方程中的符号〈 〉 为时间平均. 由方程可知,Stokes 矢量可以表示任意方向的偏振光.
Stokes 矢量表示的偏振态信息如下:
式中: ψ 为偏振角度信息;P为偏振度信息,其取值范围在[0,1]. 当P为0 时,表示非偏振光;当P为1 时,表示全偏振光;当P在(0,1)时,表示部分偏振光.
以S0、S1、S2、S3为标记的四个斯托克斯参数与邦加球的参数密切对应,设邦加球的经向角度用表示,纬向角度用 2χ 表示,式(5)可表示为:
式(8)所代表的偏振特征可以在邦加球上表示,如图2 所示.
邦加球上的任意一点与斯托克斯矢量对应,代表一个偏振态,表示单位强度全偏振光的偏振度和偏振方位角. 邦加球的经度表示偏振方位角,邦加球的纬度表示椭圆率. 邦加球的球心表示的是自然光(非偏振光). 邦加球的球体内的点表示部分偏振光. 邦加球的球面上的点表示完全偏振光. 其中,邦加球的赤道上的点表示线偏振光,邦加球的南北极点分别表示左旋圆偏振光和右旋圆偏振光. 邦加球面上的任意一点表示形态各异的椭圆偏振光,其中下半球面上的点表示左旋椭圆偏振光信息,上半球面上的点表示右旋椭圆偏振光信息.
2 天空偏振场的基本描述
在天文学领域,天球用于表示地球上方的天空.所以,天球是以地球为球心、半径为无穷大的球体.为了确定天体的位置,我们把天体投影到天球的表面. 可以建立直角坐标系表示天体位置,也可以通过其他坐标系表示天体位置:黄道坐标系、时角坐标系、赤道坐标系、地平坐标系.
地平坐标系常用于表示天空的偏振场. 在地平坐标系中,假设地平坐标系无限大,天球表面与地平面相交的圆称为地平圈,地平圈与天顶和天底相交的较大的圆称为地平经圈,与其平行的小圆则被称为地平纬圈. 太阳方位角的大小可以通过天体午圈和地平经圈夹角计算,午圈为起点,正负方向分别为南向西向北和南向东向北. 太阳高度角的大小可以通过天体中心和人眼观察者连线与地平圈的夹角计算,以地平圈为起点,正负方向分别为地平圈到天顶的方向和地平圈到天底的方向. 因此,天体的位置可以通过地平坐标系中的太阳方位角的大小和太阳高度角大小表示.天体上的中天时刻定位为0°太阳方位角和0°太阳天顶角,其物理意义为天体中心直射子午线. 如图3 所示,字母S表示太阳,表示天空中人眼观测的方向,Z表示天顶. 偏振方位角 ϕ 表示天空中P点的E-矢量振动方向与的夹角,其中P点的E-矢量振动方向垂直于PS, ϕ= 90° -∠ZPS.
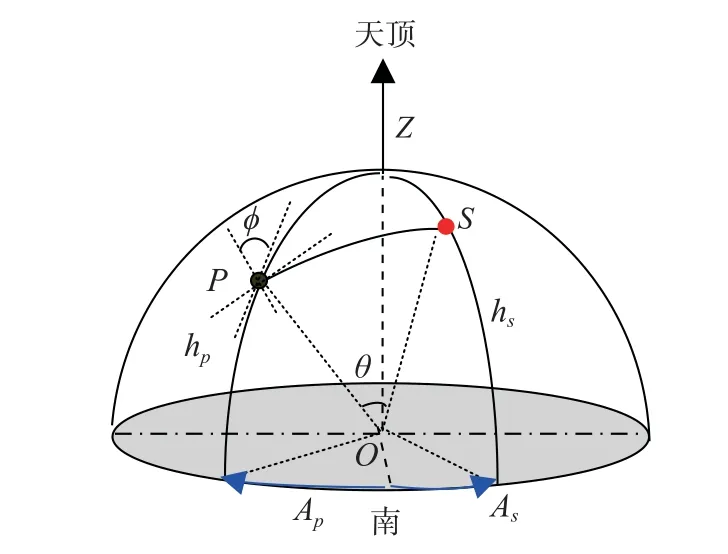
图3 天空P 点E 矢量偏振信息
由偏振度的定义,得天空偏振度分布为
式中, Θ 为散射角. 偏振方位角 ϕ 可由下式计算
由式(9)~(10)可以得到天空中观测方向光束的偏振度P和偏振方位角 ϕ ,如图4 所示,其中人眼看到的天空通过阴影部分表示,天空的偏振方向通过黑色虚线表示,天空的偏振度通过黑色虚线的宽度表示. 所以,天空的偏振态信息与太阳高度角相关,其角度值决定了天空的偏振分布特性、偏振强度以及偏振方向信息. 该角度值与天空的偏振强度信息成反比,这就意味着中午时刻(太阳高度角最大)天空的偏振强度值最小,傍晚或早晨时刻(太阳高度角最小)天空的偏振强度值最大. 此外,天空的偏振分布图有两条对称线:其中一条是与太阳点相距90°角距的大圆,在该条对称线上天空的偏振度最大;另一条是太阳与反太阳点的连线,在这条对称线上,天空的偏振角是90°.
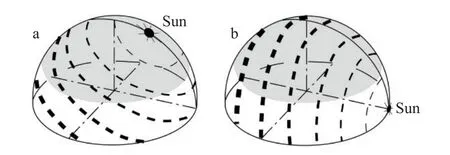
图4 不同时刻天空中的偏振模式图
因此,当我们获取了天空的图像,可以根据偏振特征的分布形式,计算获得观测者的方位信息. 多位学者对方位信息解算方法进行了深入研究.
3 一种适用于空天偏振场导航的超分辨光学相机
3.1 对偏振相机的基本需求
方法需要有数据获取传感器的支持. 在偏振导航领域,人们需要使用偏振成像相机来获取目标场景的偏振特征. 然而,可以获取目标场景偏振特征的技术具有多样性,不同的技术所获取的偏振特征具有差异性. 因此,一种小型化的具有高成像质量的光学相机变得尤其重要. 介于部分平台具有较高的移动速度,如无人机、车辆、卫星等. 我们选择快照式偏振信息获取技术,使用分焦平面偏振成像芯片,快速获取目标场景的偏振信息. 同时,希望该相机还具有对地获取目标偏振图像能力,要求偏振相机具有以下特点:
1) 单张图像具有较大的像素规模,像素规模2448×2048,进而满足获取更大的信息量;
2) 采用快照式成像技术,在单次积分时间内获取目标场景的全域图像,进而实现对动态场景的实时获取;
3) 具有高帧频图像采集能力,在1 s 内获取20 张以上的图像信息,进而感知高速动态的目标场景;
4) 具有较强的目标场景细节感知能力,在100 m距离下具有厘米级空间分辨能力(例如2 cm@100 m);
5) 具有常规的观测视场,对角线视场不小于30°.
3.2 技术指标规划
为了满足上述的要求,规划光学系统的核心指标:使光学遥感系统的分辨率达到2448×2048 像素规模;将空间分辨率设置在1.8 cm@100 m,满足无人机载条件下对地细节信息的获取;将图像获取帧频设置在30 Hz 以上,满足人眼对视频的要求;将光学谱段设置在420~700 nm,具有较宽光学谱段的同时,具有优于100∶1 的偏振消光比;将光学系统的观测视场设定在不小于20°×13°的中视场,满足对大范围目标的信息获取;同时,由于这是一款航空摄影相机,将光学系统的畸变设置在小于1‰,进而满足后续图像拼接的需求.
3.3 偏振光学相机的光机系统设计
本研究团队在上述指标约束下,开展了航空观测核心光学载荷的设计工作. 为了实现更大的信息量获取,光学系统与索尼IMX250MZR 探测器相匹配,像元规模达到了2448×2048,像元大小为3.45 μm. 为了保障单像元的光照度,将光学系统F数设为3.5;设计光学系统采用多片透射式结构,设置光学系统视场角为24.2°×20.3°的观测范围;采用78 组9 片透镜结构,实现了焦距19.7 mm,采用准像方远心光学系统设计,保障了系统的可装配性和较好的温度适应性. 光学系统具有较宽的通光谱段,谱段范围达到了420~750 nm. 光学系统重点优化了空间频率,经过光学像差迭代优化,全视场在145l p/mm 的空间频率处MTF 设计值优于0.4,对应空间分辨率1.75 cm@100 m,如图5 所示. 由于分焦平面探测器会损失50%的空间分辨率,我们采用精密位移控制台与光学系统融合设计的办法,驱动孔径光阑光学组件移动,实现超分辨成像;同时,光学系统的场曲和畸变得到了较好的抑制,全视场场曲小于50 μm,全视场畸变小于0.7‰,如图6 所示. 同时,为了适应不同温度范围,全系统采用了光学消热差设计,保证在-20°~40°具有良好的成像效果. 光学系统核心参数指标如表1 所示.

表1 偏振相机的基本参数表

图6 光学系统的场曲图和畸变图
偏振相机核心光机系统设计如图7 所示.
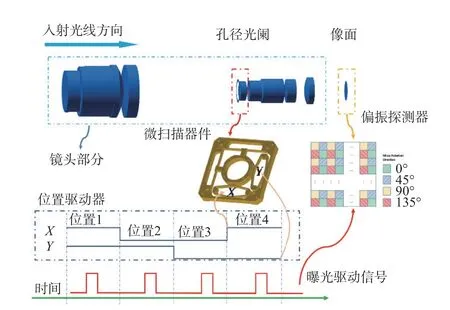
图7 超分辨光学相机系统构成图
完成的超分辨相机如图8 所示.

图8 超分辨光学相机实物图
入射光经过镜头进入光学系统,将目标影像投影于探测器靶面上. 为例弥补空间分辨率的损失,在孔径光阑组件上加入微扫描器件,压电陶瓷驱动孔径光阑组件移动,进而实现目标空间像面与探测器之间的高速精确相对运动,驱动电压需经过成像前标定获得.
本相机方案与常规光学成像系统相比,改变了原有光学系统的静态模式,增加的高速高精度移动部件. 如图8 所示,在孔径光阑处增加了压电陶瓷高速位移台,用于驱动光学元件做扫描运动,进而实现相机像面与探测器之间的精确相对位移. 与常规基于分焦平面探测器的偏振成像相机相比,本设计使得相机具有了超分辨、像移补偿、稳像以及偏振数据质量提升等多项新能力;同时,与分孔径式偏振相机相比,本设计具有明显的体积和重量优势.
3.4 “位移-电压”的精确标定
构建一套超分辨“位移-电压”标定系统,以平行光为入射光,在探测器靶面上将形成艾里斑,驱动微扫描器件的控制电压,使艾里斑在探测器靶面上移动,记录“电压-位置”关系,通过最小二乘拟合,获取曲线具体表达式. 系统构成示意图如图9 所示,曲线拟合结果如图10~11 所示.
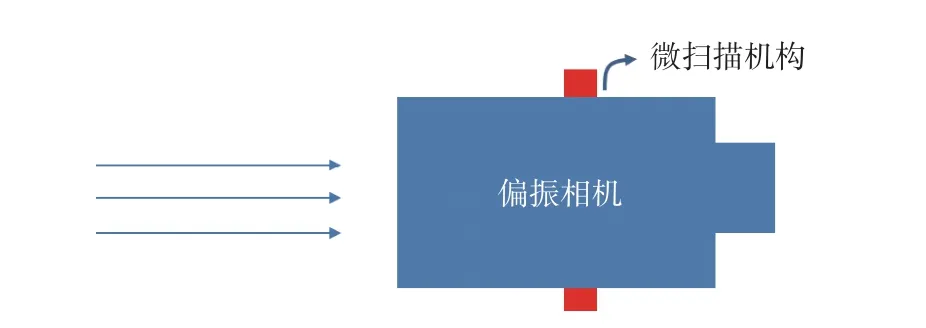
图9 标定系统构成示意图
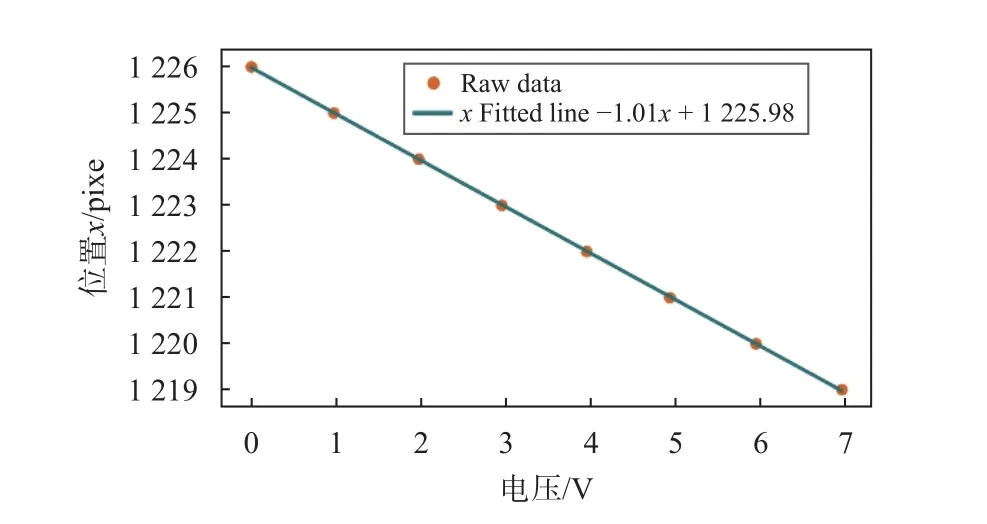
图10 X 方向位置电压曲线
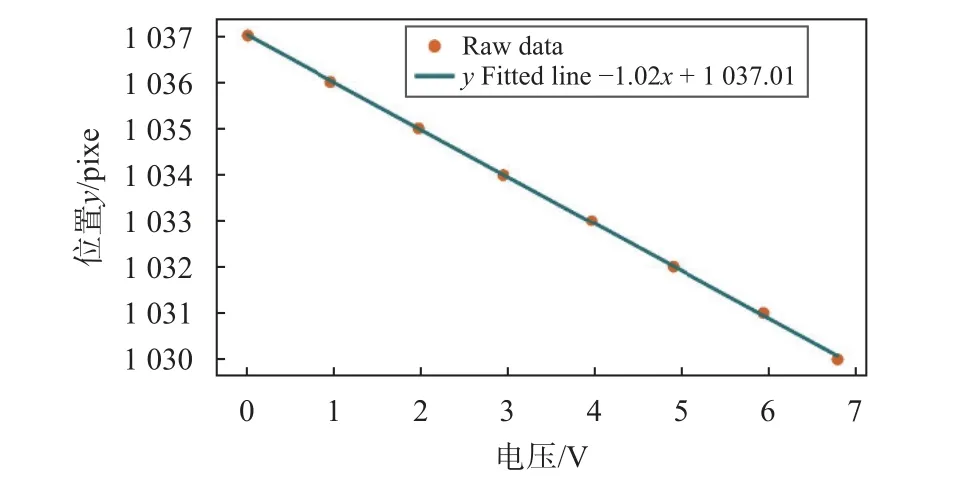
图11 Y 方向位置电压曲线
3.5 图像数据获取与质量提升分析
我们利用相机开展了对外成像和对天空成像,获取了清晰的偏振图像,依据原始数据解算获取了偏振度图像和偏振相角图像,从偏振度图像中可以发现,经过超分辨后的偏振度图像可以明显减弱原始分辨率图像中的直线断裂问题. 相机所获取的图像数据如图12~17 所示.
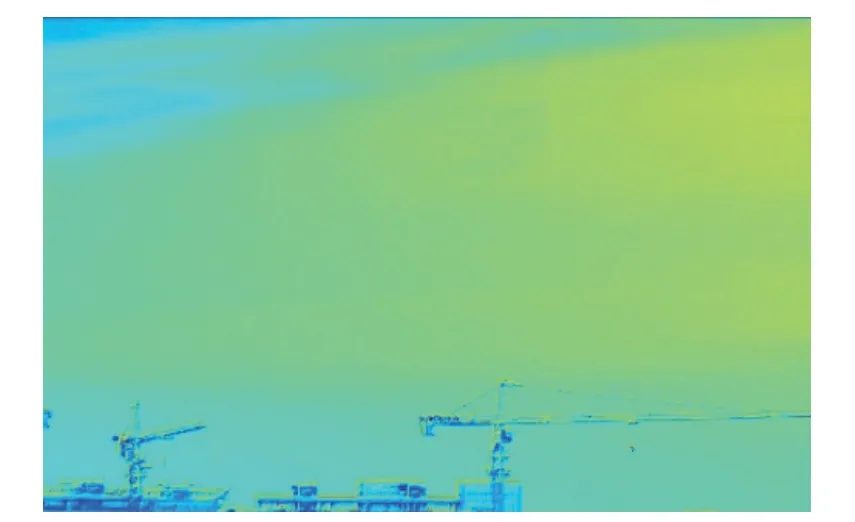
图12 含有天空偏振场变化的图像
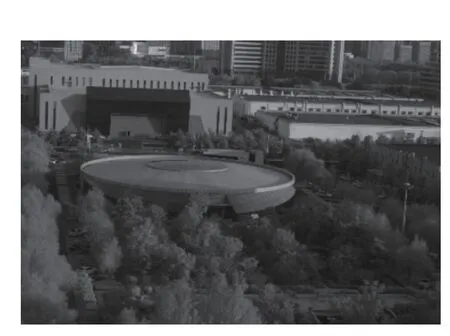
图13 获取目标场景的偏振强度图像
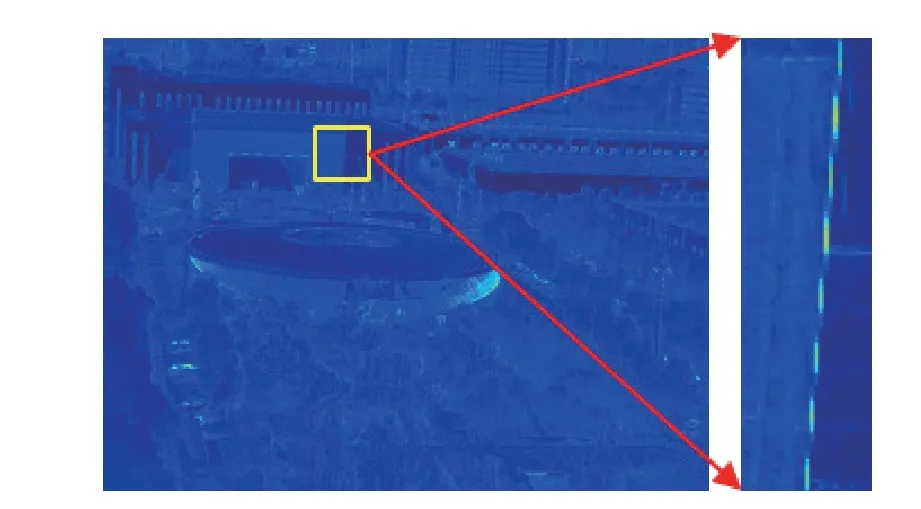
图14 原始分辨率偏振度图像及细节
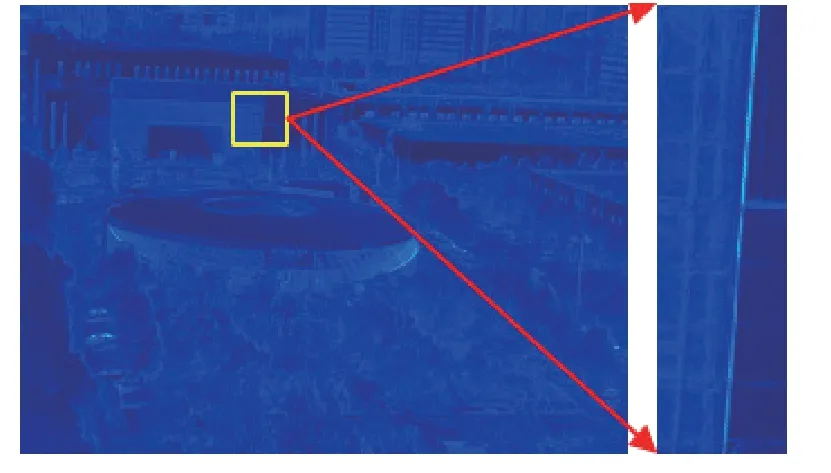
图15 2 倍超分辨率偏振度图像及细节
经过偏振度图像对比可知,超分辨相机可以有效弥补分焦平面偏振探测器的图像断裂问题,更加逼真还原目标几何特征和偏振特征.
经过偏振相角图像对比可知,图16 中原有低分辨率图像的偏振像素空间错位增加了目标图像相角的不均匀性,这使得原本高偏振态物体(如车辆)更加难以与背景(如树木)分离. 相比而言,图17 中超分辨率偏振相角图像却可以进一步降低自然物体(如树木)的偏振相角的不均匀性,这使得人造目标(如车辆)更加容易被识别和区分.
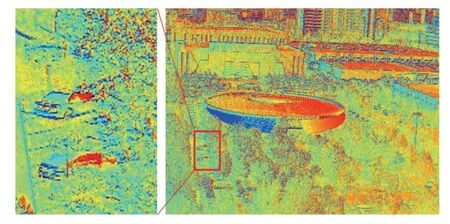
图16 原始分辨率偏振相角图像

图17 2 倍超分辨率偏振相角图像
3.6 天空偏振角模式的获取
由于偏振视觉传感器采用微阵列式像素偏振片对天空进行成像,其中,微阵列式像素偏振片由相邻的四个像素构成一个偏振光测量单元,从而完成对某一方向视角入射光的偏振态解算. 因此,只需要对单一方向采集到的天空偏振图像进行像素级计算处理,利用不同偏振角度方向像素强度,由斯托克斯矢量描述法对光的偏振角、偏振度及偏振角模式进行解算.
为验证偏振视觉传感器获取天空模式以实现偏振导航定向的可行性,选定实验地点为中国科学院长春光机所研发大楼的空旷平台,实验时间为2023 年4 月24 日中午11:00 点. 将天空偏振光测量装置放置在平台上,单次实验采集10 张照片,其中每相邻四个像素分别对应0°、45°、90°、135°微偏振像素方向. 单次实验同一方向采集10 张照片并进行像素平均计算,以减小传感器响应误差,采集所得天空偏振图像如图18 所示. 10 张图片采集用时小于1 s,因此可以认为在这段时间内天空偏振模式保持稳定.
图18 获得的天空原始偏振图像数据
使用MATLAB 编程工具,通过采集以相邻四个像素为一个微偏振阵列的强度值,对其进行偏振角、偏振度及偏振角模式计算,验证偏振视觉传感器获取偏振模式可行性. 提取相邻四个像素灰度值,计算出斯托克斯分量I、Q、U,线偏振度(linear polarization degree,DoLP),线偏振角(Linear polarization angle,AoLP),计算所得天空偏振模式的测量结果如图19所示. 提取偏振角模式对称轴结果如图20 所示,图中的横纵坐标表示像素位置.
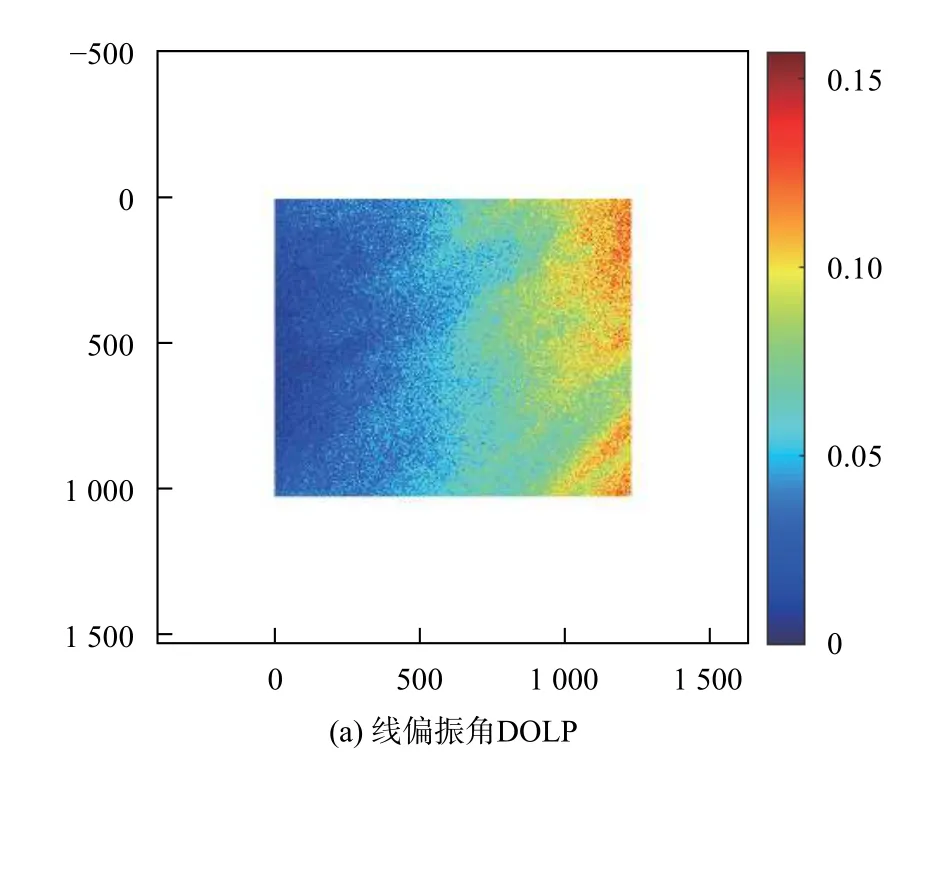

图19 天空偏振模式测量结果

图20 偏振角模式对称轴提取结果
以上结果表明,太阳方向矢量蕴含在天空偏振模式中,且天空偏振模式可以实现偏振导航中载体定向,且不需要直接观测太阳,仅观察天空中一小块区域的偏振模式即可实现定向功能. 但确切的方位角度测量需要进一步的标定和计算.
3.7 成果技术的潜在应用方向
偏振导航系统与目标场景偏振特性测量系统相类似,均以偏振图像信息为基础,计算目标数据(如航向角度、目标偏振特征等),因此具有一定的相似性. 从资源集约角度出发,将二者结合更有利于发挥平台载体的能力. 随着偏振器件性能的不断优化,本技术的偏振信息(如消光比)测量精度亦将不断提高,因此,本技术的潜在应用方向包括:1)精准偏振导航;2)目标场偏振特性遥感;3)遇险搜救;4)气象预报;5)远距离三维形貌测量等.
4 结束语
本文针对空天偏振场遥感的需求,设计了一款基于微扫描位移平台的超分辨偏振相机,优化了光学成像系统的场曲和畸变等像差,并对偏振超分辨成像系统进行了高精度标定. 我们利用标定后的偏振超分辨相机对外场进行连续成像,从线偏振度和偏振相角图像中可以看出,偏振超分辨成像可以提高目标场景的细节分辨能力,验证了偏振超分辨技术在空间分辨率指标上的提升. 目标场景偏振信息高质量获取,可以为后续天空偏振光场导航提供仪器基础.