基于熵差的海底地形匹配导航算法
2024-01-12晏泽翌沈体雁于家成
晏泽翌,沈体雁,于家成
( 1. 中国地质大学(武汉)公共管理学院, 武汉 430074;2. 华北科技学院电子信息工程学院, 廊坊 065201;3. 北京大学政府管理学院,北京 100871 )
0 引言
惯性导航系统(inertial navigation system,INS)自主性好,隐蔽性强,被广泛应用于航空、航天、航海和陆地等多种军民技术领域中. 由于INS 的定位误差随时间积累,在实际使用过程中多用外部信息进行校正从而形成组合导航系统. 目前,在水上空间载体导航中,多采用天文信息、无线电信息及卫星信息来进行校准. 然而,利用水下载体进行导航时,接收水面信息极大地影响了系统的隐蔽性[1]. 为了提高隐蔽性,同时增强系统的精确性,利用海底地形辅助导航(terrain-aided navigation,TAN)系统、重力无缘辅助导航系统和磁场图形匹配导航系统等[2]的地球物理导航技术引起了人们的高度重视 .
海底TAN 系统是通过多波束系统测量水下载体的地形来决定载体精确位置的系统. 它由INS 提供载体的基本位置信息,根据该位置坐标,从存储在计算机中的海底地形数据库中读取相关区域的地形数据,然后将多波束声纳测深仪测得的航线下方的地形信息一同送给数据处理计算机,进行相关匹配,得到最佳匹配点. 利用该匹配点的位置信息对INS 进行校正,从而有效提高INS 的定位精度. 在这一过程中,关键技术之一是匹配算法的设计,由于地形熵差包含了丰富的地形信息,在TAN 中获得了较广泛的应用.文献[3-4]在图像的基础上提出了基于熵特征和局部熵差的图像匹配算法,并使用图像的熵进行了匹配,文献[5]在处理噪声滤波时提出了局部差异熵的概念,由于熵具有信号占比的特点,从而根据这种占比滤除信号噪声. 文献[2]提出了在水下TAN 系统中应用地形熵进行匹配的方法,匹配过程设计为三个阶段(搜索、定位和跟踪),但是存在计算量大的缺点,搜索速度慢.
为了提高匹配速度,本文对传统算法进行了改进,在搜索阶段对匹配区域不再进行分块搜索,而是采用遍历的方法,通过搜索与定位的转换逻辑,省却了跟踪阶段,提高了匹配速度,同时,匹配的精确度也获得了一定情况的改善.
1 地形信息熵匹配导航
截取水下运动载体的一段航迹,该航迹的水深测量点构成了一个水深序列,该水深序列的地形差异熵值反映了这段航迹所经过区域的局部地形信息特征.将量测水深序列的差异熵值与匹配窗口内的水深值序列所构成数组的每一差异熵值作比较,得到的熵差值最小的点即为匹配点[6-7],局部地形差异熵的定义如下.
1.1 局部地形差异熵的概念与表达
对于电子海图中M×N大小的区域,各格网点的图示水深是hi,j,平均水深定义为
任一格网点地形差异值定义为
局部差异概率为
Pi.j表示该格网点水深值对局部地形差异熵的贡献率.
该电子海图区域的局部地形差异熵为
局部地形差异熵可以用来描述地形起伏的复杂程度,具有以下优点:
1)地形差异熵反映了该地形所含信息量的大小,并由此来反映局部地形的起伏特征. 局部水深变化越剧烈,地形起伏越复杂,信息量越丰富,计算出的熵就越大,越有利于匹配.
2) 地形差异熵具有平滑奇异水深测量点的作用,比如由于鱼群、海藻等水下生物造成的测量奇异点.
3)地形差异熵具有抗水深测量误差的能力,主要是可以利用平滑多波束系统本身的测量误差和水下环境的瞬时变化造成的水深量测误差,通过比较实时地图与INS 输出点附近区域的地形差异熵,用来校正INS 输出的位置误差.
1.2 组合导航原理
首先应用多波束声纳系统获得海底局部地形的水深值实时图,在载体自身携带的电子海图的基准匹配区域内进行匹配,通过搜索和定位两个阶段的地形差异熵匹配算法设计,按照实时图地形差异熵与匹配区域内各子域地形差异熵差值最小作为相似度准则.通过匹配结果来校正INS 随时间积累的位置误差[8],实时过程中的误差过滤还可以结合Kalman 滤波方法[9-10],从而获得载体的精确位置,其原理如图1所示.
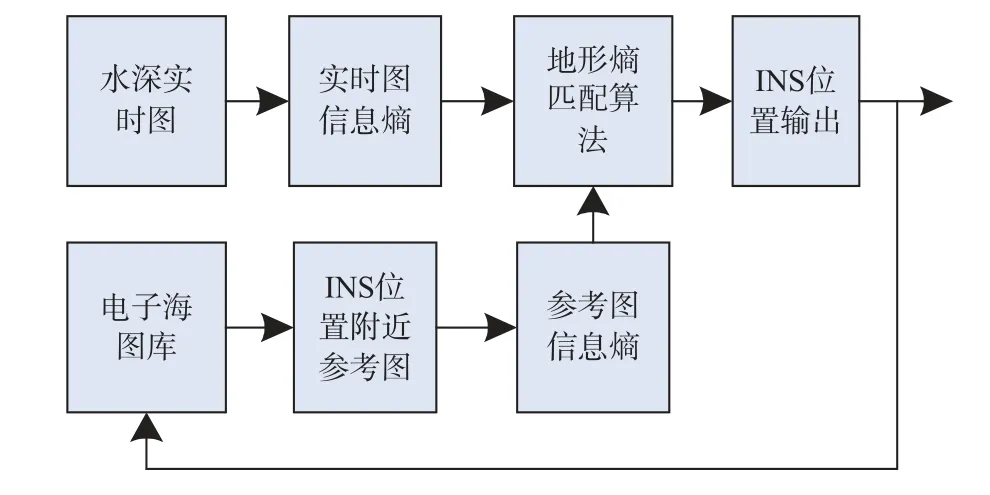
图1 地形熵辅助组合导航系统原理图
1.3 地形差异熵匹配算法设计
将海底局部地形(差异)熵引入水下TAN 系统的匹配算法中,地形匹配分为两个阶段:搜索阶段和定位阶段. 其中搜索阶段用于较大范围的地形搜索匹配;定位阶段是小范围的地形单点匹配阶段,当搜索误差小于设定的检测窗口大小时进入定位阶段[11-12].
1.3.1 搜索阶段
搜索阶段主要用于较大范围的地形搜索匹配,适用于初始匹配以及INS 误差较大时的区域匹配. 其基本思想是,计算多波束系统实际测量的水深实时图的地形差异熵,以当前点的INS 输出位置和前一步积累的误差大小确定匹配窗口,然后将水深实时图在匹配窗口内沿经度方向和纬度方向进行遍历,通过比较各差异熵,得到绝对差最小或方差最小的格网点,将该点确定为最佳匹配点,遍历顺序如图2 所示.
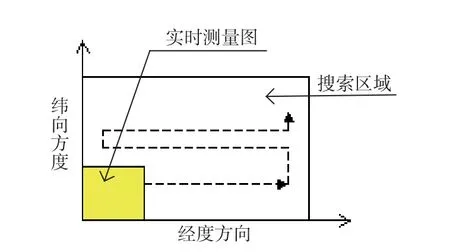
图2 搜索遍历示意图
具体步骤如下:
第一步,将实时图内测量的水深值先沿经度,再沿纬度方向排成一列数组,计算该数组的熵值作为实时图的熵.
第二步,在搜索区域内先沿经度方向,后沿纬度方向进行遍历搜索,搜索到任一位置时,从此位置开始在搜索区域内截取一块实时图大小的子区域,先沿经度方向,后沿纬度方向排列水深数组,计算该数组的熵值作为匹配子区域的熵.
第三步,比较最小绝对差或最小方差,得到最佳匹配格网点. 将前面计算得到水深序列的(差异)熵和熵序列数组的各元素比较,求出最小绝对差或最小方差以及对应的最佳匹配格网点,在此选用最小绝对差进行计算.
1.3.2 定位阶段
定位阶段用于小范围的地形搜索与定位,适用于INS 误差很小时的匹配,属于单点匹配. 当INS 的误差范围小于等于搜索窗口大小时,进入定位阶段.由于搜索窗口较小,在定位阶段匹配检测窗口内只能得到1~2 个水深量测点,因此在定位匹配算法中,直接把实时量测水深数据引入到电子海图水深数据中,进行差异值计算并进行匹配.
具体步骤如下:
第一步,设定定位窗口大小,或者在匹配开始前将定位窗口大小设定好. 通常定位检测窗口w设定为3×3 或5×5. 以当前待匹配点为中心,确定检测窗口位置.
第二步,将量测水深值引入到检测窗口的格网水深数据中,进行水深差异值和差异概率的计算.
平均水深为
检测窗口内格网点的水深差异值为
水深差异概率为
量测点的水深差异值为
其水深差异概率为
第三步,将定位检测窗口中各点与量测点进行比较,计算最小互信息量,相应的格网点即为最佳匹配点.
第四步,对最小互信息量进行阈值判定. 由第二步的公式可以发现,在定位阶段最小互信息量与最小条件差异概率具有相同的含义. 由于定位阶段不用进行局部差异熵的计算和匹配,因此,不能采用前面的最小条件差异概率值来确定阈值. 在此我们对最小互信息量进行阈值判断,阈值的设定采用自适应的方法,用前一阶段的最小互信息量作为当前阶段的阈值.
为了决定是否采纳该匹配点,需要对定位效果进行评价,以决定是否采纳该匹配点,进行匹配处理策略的设计.
1.4 匹配效果评价及误匹配处理策略
如何在理论上评价匹配效果,并获得有效的评价指标,对匹配程度进行定性且定量的评价也是一个重要问题. 同时,在怎样的情况下认为匹配是成功的,结果是可接受的,为此采取如下三方面策略:
1) 对两幅水深图像,在方向已经配准或仅存在位置平移的情况下,相同位置上,若水深差值限定在某个范围的数目不小于某个数值,则认为匹配结果是可以接受的.
2) 对于两幅水深图像A、B定义距离.
式中,d(a,B) 表示在B中的所有点到A中某一点的距离最小者, 同理定义
式中,d(b,A) 表示在A中的所有点到B中某一点的距离最小者.
如果两幅图达到了匹配,那么,对A中的一点a,在B中则找到了相应的匹配点,从而有d(a,B)<δ1;同理,对B中的一点b,在A中则找到了相应的匹配点,从而有d(b,A)<δ1.
其中, δ1为因量测误差、制图误差等因素而设置的阈值. 计算A中所有达到匹配的点的数目,计为N(A). 同理,计算B中所有达到匹配点的数目,计为N(B),当完全匹配时,N(A)=N(B) =匹配图内水深点数目. 考虑到各种误差因素,将有N(A)=N(B)< 匹配图内水深格网点数目. 因此,愈大匹配效果愈好.
3) 在理想情况下,设两幅图总的格网点数目为N.通常,N(A)=N(B)≤N,等号对应格网点获得完全匹配,但一般小于号成立.
4) 在N(A)<Nδ1、N(B)<Nδ1时,认为匹配失效,或称误匹配,此时不再进行匹配,以INS 给出的位置为准.
2 实验仿真
利用VC 编写仿真软件,对海底某地形进行了仿真,将该地形划分为60×60 格网点,格网间距456 m,面积大约为27 km×27 km 的方形区域,匹配区域基准地形如图3 所示.
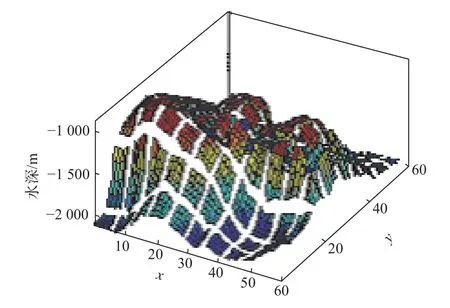
图3 匹配区域基准地形海图
仿真过程中,因地形过大,取其中10×10 格网点区域,即面积约为2.7 km×2.7 km 方形区域,重新插值为100×100 细格网,设载体直线航行,采用的初始条件为:初始经度 λ=125.174 °,初始纬度 ϕ=25.506 °,初始经纬度误差 0.02 °,陀螺漂移率 ε=0.001 °/h,加速度漂移率 ∇=10-5m/s2,潜艇航速V=4 m/s . 沿纬线直线航行,沿途经历水深如图4 所示,由图4 可知,载体由水浅处逐渐航行到水深处,由-2015 m 过渡到-2040 m 处的水域. 对INS 给出的途径位置进行匹配,通过搜索和定位两种转换逻辑的匹配仿真,经度匹配误差和纬度匹配误差分别如图5 和图6 所示.由图可知,在同时进行经度和纬度匹配的情况下,2 s内都达到了收敛,匹配逐渐稳定时,精度控制在100 m之内,经度比纬度的匹配效果稍好,相对于文献[2]中500 个点耗时5000 s,平均每个点10 s,匹配速度具有一定改善.
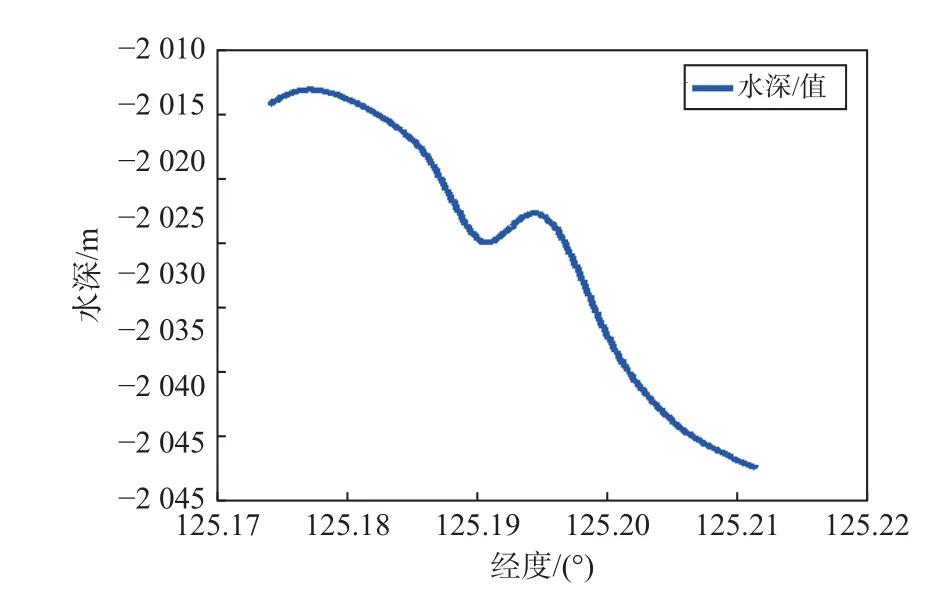
图4 载体沿途航线水深

图5 海底地形经度匹配误
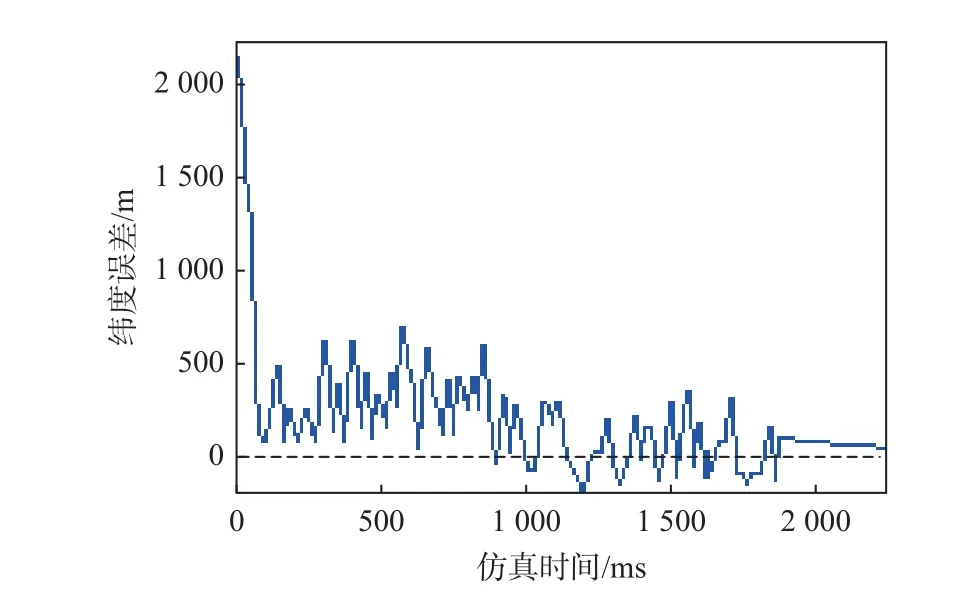
图6 海底地形纬度匹配误差
3 结束语
本文将INS 和海洋地理信息紧密结合起来,应用海底地形差异熵信息,通过设计搜索和定位两个阶段的匹配,对INS 进行校正. 搜索阶段作为粗匹配阶段阶段,一旦匹配失效,则影响以后的精匹配,所以粗匹配阶段更注重匹配的稳健性,以使得真实的位置点包括在匹配范围内;定位阶段为精匹配阶段,注重匹配的准确性,以准确的达到匹配点在真实位置附近,减小匹配误差. 通过VC 仿真平台进行了仿真,仿真结果表明,设计的算法匹配速度快,稳定时精度控制在100 m 之内,具有良好的应用价值和理论意义.