基于GPS定位的智能运送小车设计
2024-01-11邝川明黄安儿曾一煌郭佳怡王佳蓓
邝川明 黄安儿 曾一煌 郭佳怡 王佳蓓
摘 要:近些年,受新冠病毒疫情的影响,快递运送和外卖送餐等服务存在疫情传播隐患和诸多不便。本文结合GPS导航技术,设计了一款定位运送智能小车。该小车采用MM32芯片作为主控,并将GPS采集到的经纬度数据进行flash存储到芯片中。该小车可以根据不同订单需求调用不同数据,使车辆沿不同路线行驶。该小车通过GPS导航可实现快递或外买最后一公里的定位运送,在方便人们生活、提高人们生活质量的同时,也减少了疫情防控期间的人员接触和聚集。
关键词:GPS 定位运送 MM32芯片 舵机
1 引言
在疫情的影响下,为响应疫情防控的要求,居民的生活和购物等方面都受到了很大的影响。随着互联网行业的快速发展,在给人们的生活和购物等方面带来便利的同时,还带动了快递行业和外卖服务的空前繁荣,而随着业务的不断增加,快递行业和外卖服务面临着一系列的问题。例如:部分地区的人口比较密集,快递包裹数量多,派送人员因工作量繁多可能无法准时配送包裹而引发买家与快递公司的争执。归结原因在于,近年来,我国人民的生活水平不断的上涨,互联网购物日益增加,快递和外卖服务的需求不断提高,而现实中派送人员的不足及工资不断上涨等,使得各企業开始选择无人配送进行最后一公里或者一个区域的配送服务,无人配送不仅可以降低成本,增加效率,还可以缓解劳动力短缺的问题。
因此,无人驾驶的定位运送智能小车是未来快递行业发展的一种趋势。首先,定位导航技术可解决配送“最后一公里”的实时反馈配送位置的问题,让用户能通过查询快递的实时位置和配送情况。其次,定位导航技术能够高效地完成配送任务,可以省去现有的很多取件环节,只需要用户在确认的定位点,就可以方便的取件。
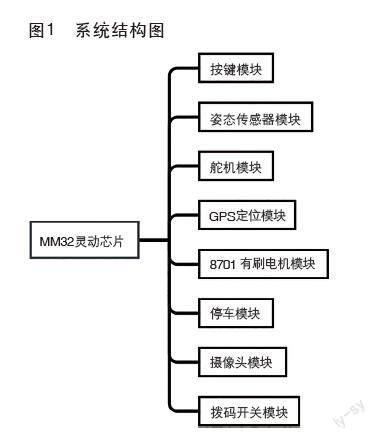
2 系统结构设计
整车系统包括使用灵动MM32芯片、GPS定位模块、摄像头模块、8701电机驱动模块、姿态传感器模块、舵机模块、停车模块、有(无)刷电机等模块以及各种传感器组成,结构图如图1所示。以MM32芯片主控,将GPS采集到的经纬度数据进行flash存储到芯片中,可以根据不同需求调用数据,使车辆进行不同路线的行驶。控制原理:根据点的经纬度数据计算距离和航向,使车在行驶中不断进行航位推算,寻所存的经纬度点。
3 硬件电路设计
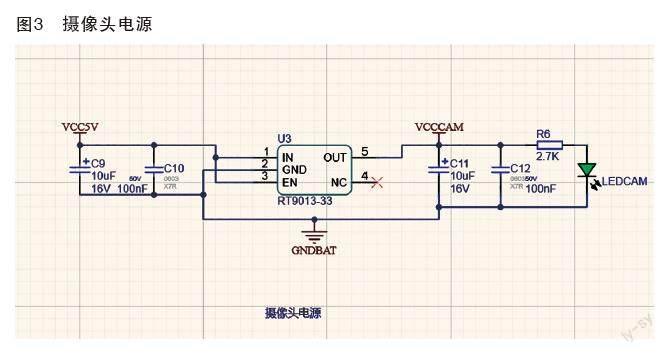
3.1 MM32主控芯片
如图2所示,为MM32芯片及其所对应的各引脚的网络标识。程序上的指令主要通过其各引脚的网络连接,传输到到电路板上的各个模块中,进行控制和反馈。
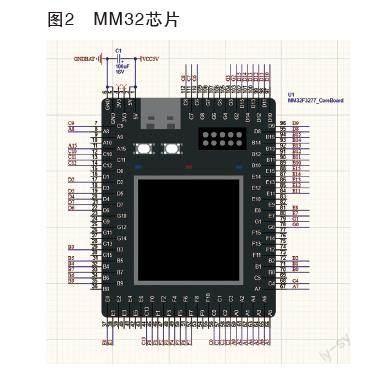
3.2 摄像头模块
如图3所示,为摄像头电源的电路原理图。电路中所用的芯片为线性稳压器,其功能是将输入的电压输出为3.3V的电压,能够在输入电压或者负载发生变化时提供稳定的直流输出电压,保证电路的工作。
3.3 舵机模块
如图4所示,为舵机电源的电路原理图。其中所使用的DC-DC电源芯片主要起降压作用,其输入电压为3.8V到36V,输出电流最大可达5A,在电路中起到降压、稳定输出电压的作用。
3.4 电机驱动模块
如图5所示,为驱动板上DRV8701芯片和4个mos管组成的全桥驱动电路原理图。
4 软件控制部分
4.1 GPS定位功能的实现
程序1:
功能:通过串口接收GPS定位数据,对数据进行简单的赋值。
程序2:
功能:对GPS语句进行解析,得出经纬度、高度和卫星数目等数据,然后使用这些数据进行导航的实现。
4.2 小车导航功能的实现
程序:
作用:计算车与定位点的距离,判断车在行驶过程中是否到达用户所需的位置,执行控制变量KP,KD的赋值,电机PWM的输出。
4.3 姿态传感器功能的实现
采用高分辨力差分数模转换器,内置自动补偿和滤波算法,最大程度减小了环境变化引起的误差。把静态重力场的变化转换成倾角变化,通过数字方式直接输出当前的横滚角和俯仰角,产品安装方便、使用简单、体积小、抗外界电磁干扰、承受振动冲击能力强。
程序:
作用:使用四元数对IMU进行姿态解算,使单片机实时了解车的所在位置和姿态,提高导航精度。
4.4 小车避障功能的实现
基于结构光的深度相机,发射出的光会生成相对随机但又固定的斑点图样,这些光斑打在物体上后,因为与摄像头距离不同,被摄像头捕捉到的位置也不相同,之后先计算拍到的图的斑点与标定的标准图案在不同位置的偏移,利用摄像头位置、传感器大小等参数就可以计算出物体与摄像头的距离,再将采集的数据传送给MM32芯片处理,重新规划出路线。
程序:
作用:对摄像头采集的图像进行大津法求阈值大小,进行动态阈值的输出,使摄像头采集的不同环境下的图像都可以清楚的被芯片识别与处理。
5 定位运送的功能原理
以MM32芯片主控,将GPS采集到的经纬度数据进行flash存储到芯片中,可以根据不同需求调用数据,使车辆进行不同路线的行驶。当小车到达指定的运送点后,用户可在小程序上点击“取件”,小车通过小程序上的信息传输到MM32芯片,芯片根据信息作出响应,然后发出指令打开舱门给客户,待货物取出后关闭舱门,舱门上相应的传感器会将舱门关闭的信息传递给MM32芯片,最终判定此次运送结束。
6 结论
小车采用了一种以灵动MM32为核心与多个模块相结合来实现GPS定位运送智能小车的设计方案。经过多方面的调试后,小车不仅能够完成我们最后一公里的外卖和快递的运送,还能够灵活的应用在各个领域中,在给我们的日常生活提供便利的同时,积极的响应疫情防疫的要求,有较好的使用和推广价值。
参考文献:
[1]林立,谭青青,胡凯程智能无人快递小车(机器人)创新服务设计研究[J].山东工业技术,2018,(16):108-109.
[2]王俊.电子商务环境下“最后一公里”物流配送模式研究[D].北京:北京交通大学,2017.
[3]杨琪,李国卿,郝俊杰,等.智能快递车自助寄取快递系统的设计[J]机电技术,2017,(2):2-6
[4]陈玉.浅谈无人驾驶汽车之各种感知传感器技术[J].汽车与驾驶维修:维修版,2018(7):88.
[5]王淼.多传感器智能无人平台开发与导航技术研究[D].沈阳: 沈阳理工大学,2018.
[6]王玲玲,梁勇.基于摄像头的自主循迹智能车设计门.计算机与数字工程,2017,45(11):2314-2316.
