智能采摘机器人路径规划的设计与研究
2024-01-11吴妮妮
吴妮妮
(长江职业学院,武汉 430074)
0 引言
随着人工智能化的发展,我国果园的采摘任务逐渐由人力劳作向机器自主作业进行转变。机器自主作业时,需要识别一条无障碍、短距离的采摘路线[1]。然而,我国大部分的果园地处山林丘壑间,路面宽窄不一,起伏不平,加之行驶过程中出现的果树等障碍物,导致采摘机器人无法快速、安全地到达目标点,故不能有效地完成采摘任务,使得果园智能化作业陷入瓶颈[2]。
针对上述现象,借助图像处理、蚁群算法、PID闭环控制等技术对采摘机器人的行驶路线进行规划和跟踪,并运用嵌入式为手段设计了一款适用于采摘机器人的路径规划-跟踪控制系统。系统能够寻找出一条避开障碍且距离较短的行驶路线,使得采摘机器人能够更智能化作业,对今后智慧农业的发展具有现实意义。
1 总体设计方案
果园采摘机器人实现自主智能采摘的关键是能够找到一条最优路径,并设计出合理的路径跟踪控制方法,使其能够准确、安全地到达目标点[3]。因此,采摘机器人的导航任务分为路径规划和路径跟踪。路径规划是指机器人在有障碍物的工作环境中如何找到一条最优运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有障碍物;路径追踪需要采摘机器人根据自身情况,从某一处出发,按照某种控制规律到达该路径上,实现其跟踪运动。因此,从果园图像的采集开始,设计的采摘机器人的路径规划及路径跟踪思路如图1所示。
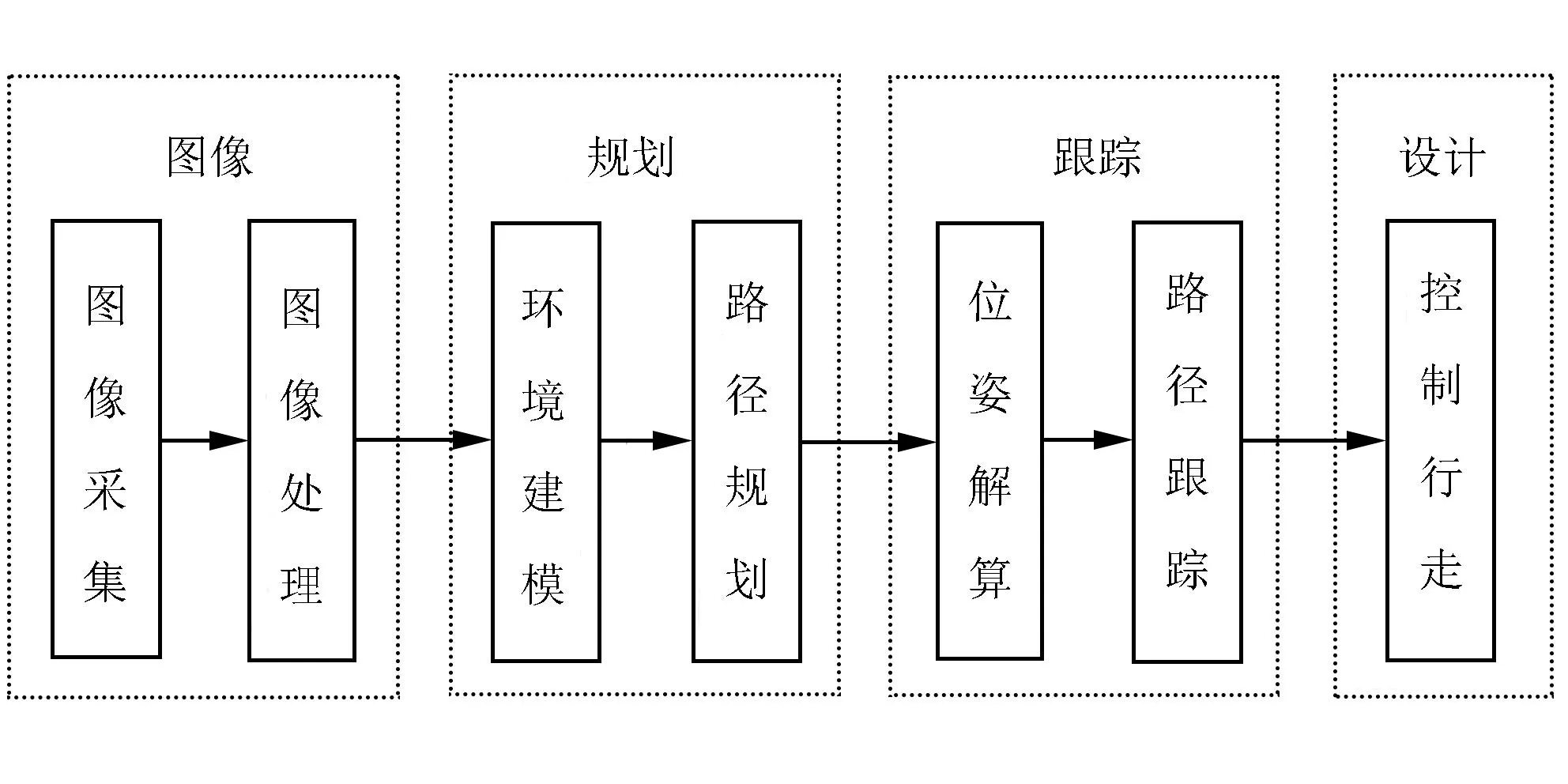
图1 总体设计思路Fig.1 Overall design idea
由无人机搭载相机拍摄果园图像,并通过WiFi无线通讯发送给机器人;经过相关图像处理后,确定相关比例尺寸[4];采用栅格法对图像的比例尺寸进行建模,由蚁群算法完成路径规划,筛选出一条最优线路;根据运动学模型得到采摘机器人的位姿数据,由PID控制器转换为实际的控制信号,控制采摘机器人行走[5]。
2 图像采集及处理
通常情况下,无人机搭载相机采集到的果园图像需进行以下处理,从而转化为对应的数字信息。
1)原始果园图像属于YUV颜色空间,需将其转换为RGB颜色,转换表达式为
2)对得到的RGB图像进行灰度处理,即处理成黑白二值图像,其表达式为[6]
Gray=0.2989R+0.5870G+0.1140B
3)得到的二值图像需区分果树与道路,故进行Otsu分割。假设阈值为T,则表达式为
g(T)=ω0ω1(μ0-μ1)2
其中,ω0、ω1分别为目标、背景像素点数量;μ0、μ1分别为目标、背景平均灰度值。
4)将果园实际坐标值与图像中点的坐标进行对应,得到图像坐标向实际坐标转换的矩阵,实现图像的几何校正。转换矩阵的表达式为
5)为了确定后续栅格尺寸的大小,需要将图像尺寸按比例转换为实际果园的尺寸[7],故进行比例尺寸的转化,即
其中,k为比例因子;l为图像上的两点间的距离;L为果园实际两点间的距离;(x1,y1)为起点的坐标位置;(x2,y2)为终点的坐标位置。
3 基于蚁群算法的路径规划
依据收集的环境图像信息的程度可以将路径规划分为全局路径和局部路径[8]。
鉴于采摘机器人能够最大程度地找到出发地到目标点的最佳线路,采用全局路径进行规划。首先以实际图像建立栅格图,然后采用蚁群算法进行路径最优筛选。
栅格图是将果园环境转换为二值信息的图片,规定黑色栅格为果树等障碍物,白色栅格为采摘机器人能够行驶的区域,实体的障碍物如果不满1格,按1格计算。栅格尺寸越小,计算越准确,复杂程度会越高,如图2所示。

图2 栅格图事例Fig.2 Grid case
假设栅格图为m×n,单个栅格表示(i,j),则所有栅格的集合为E[9],所得表达式为
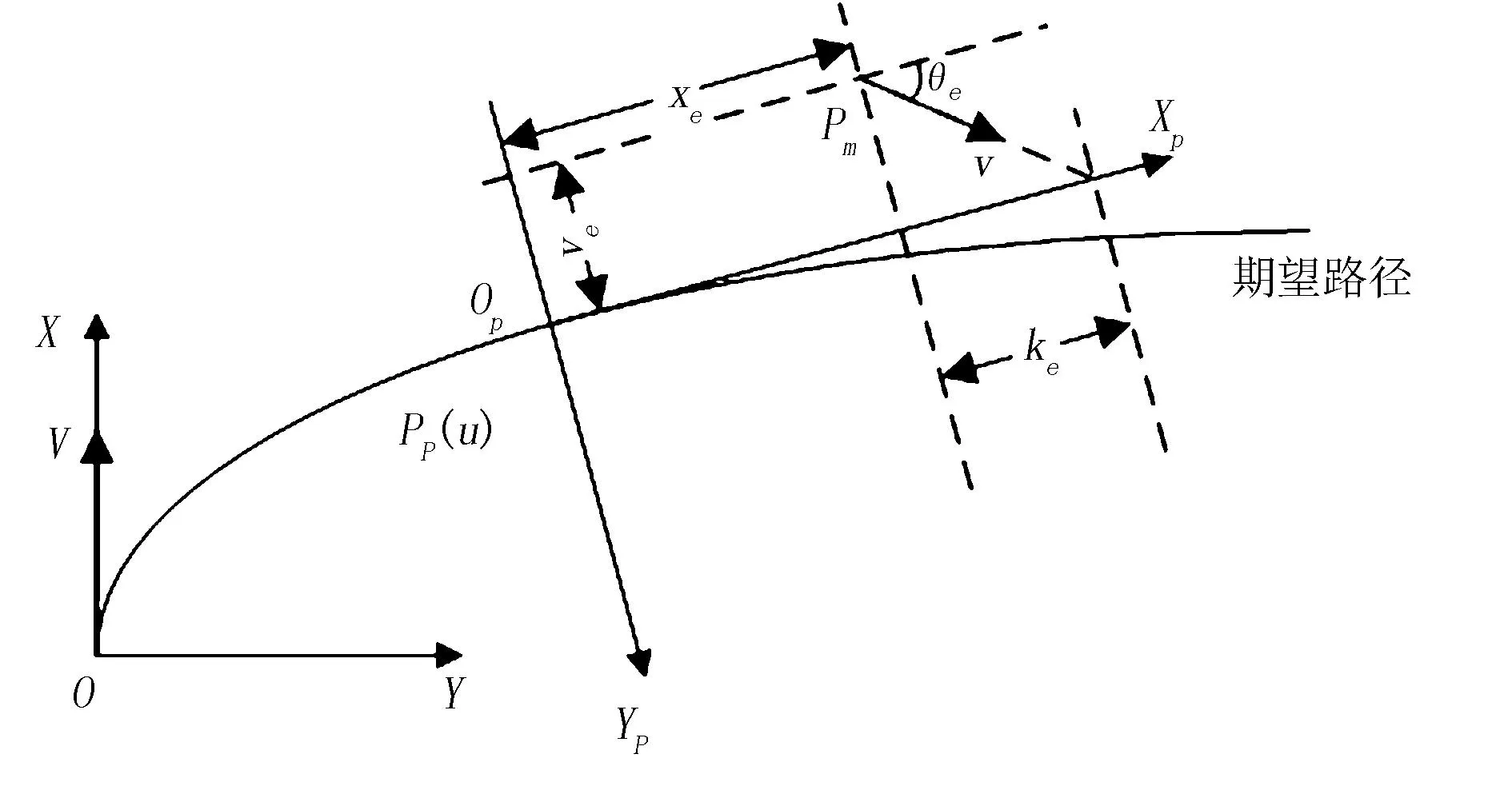
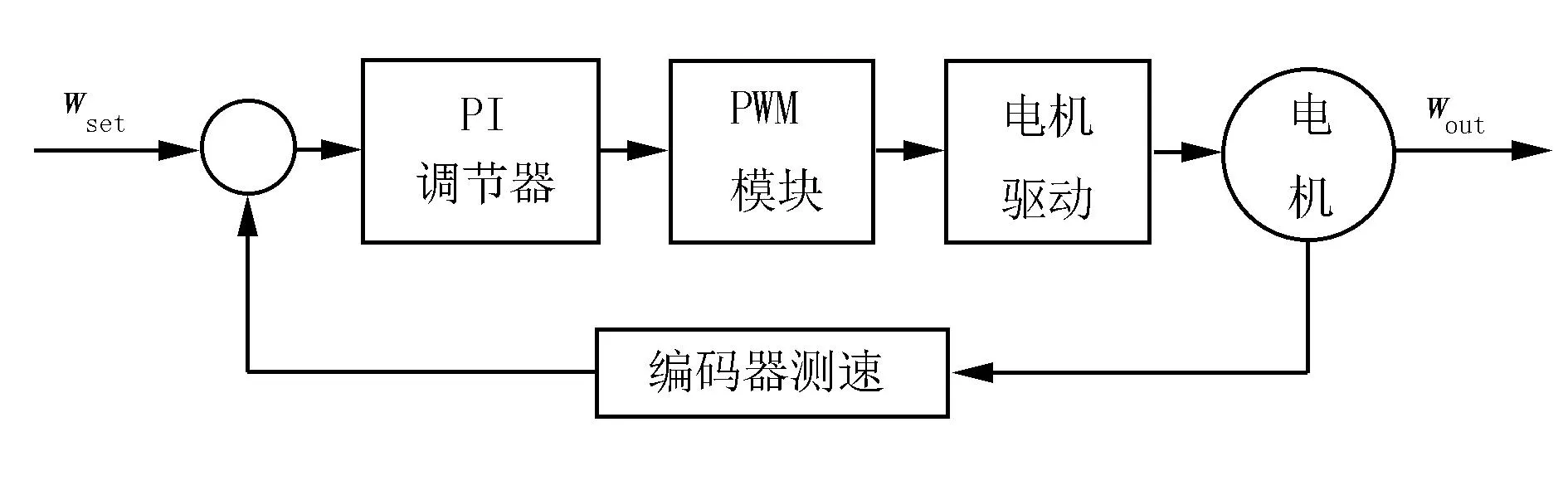
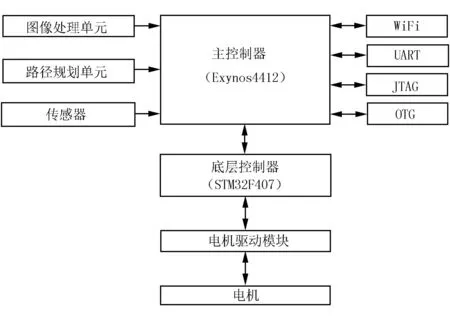
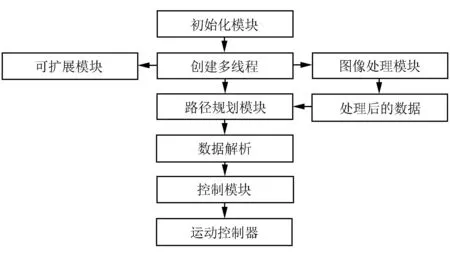
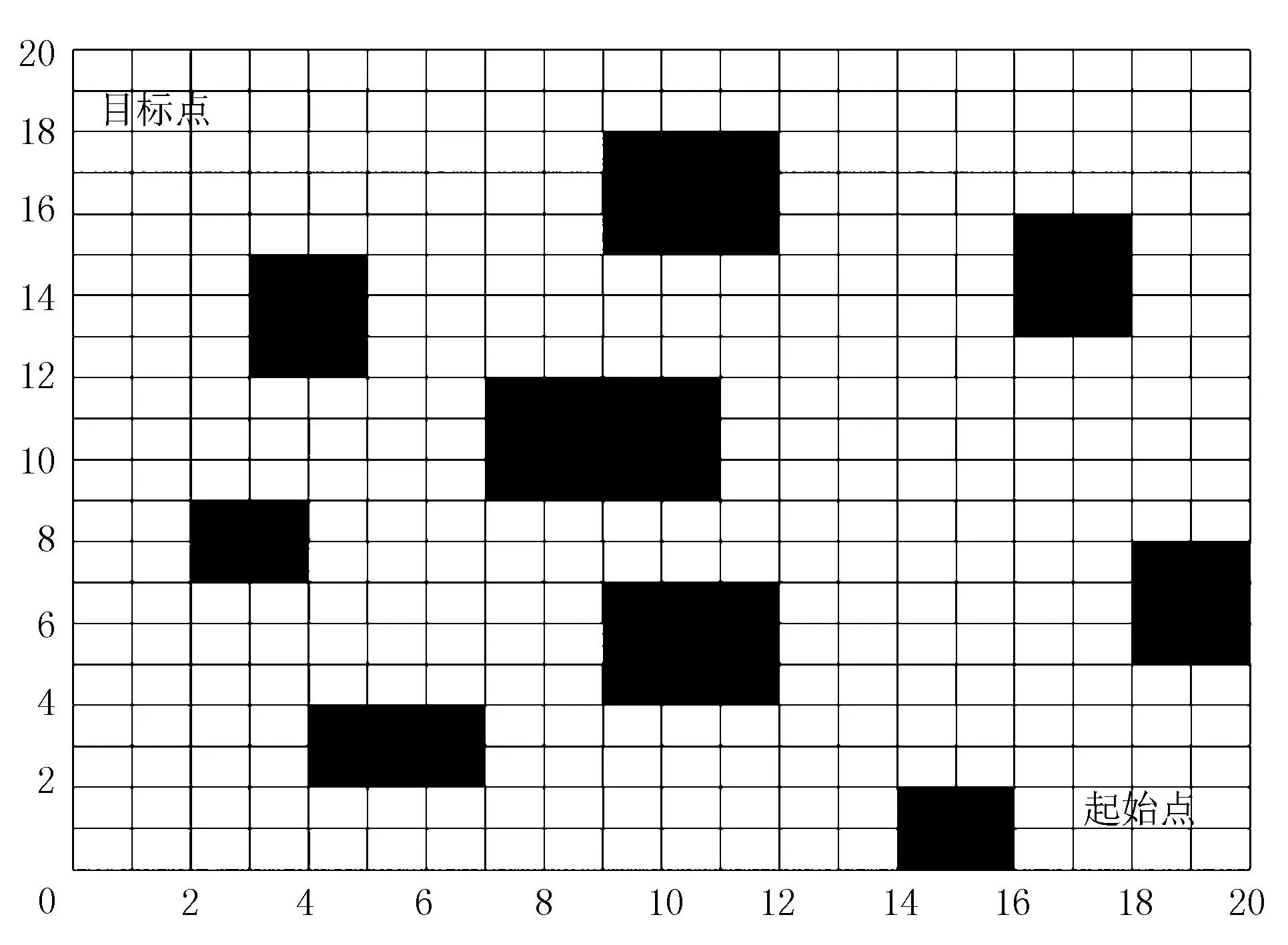
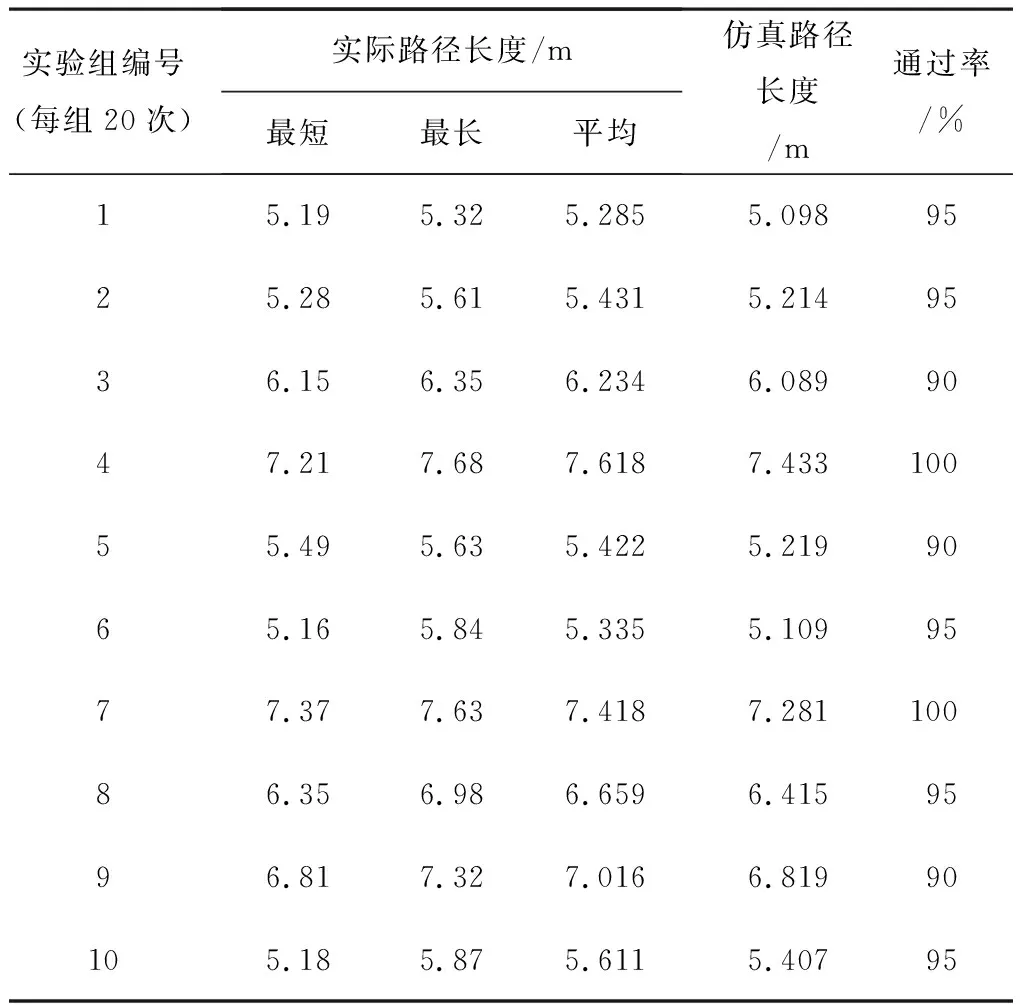
E={(i,j)|0 当采摘机器人用八领域行走,则其在位置(a,b)时,下一步的栅格集合为D(a,b),表达式为 D(a,b)={(a-1,b-1),(a-1,b),(a-1,b+1), (a,b-1)(a,b+1),(a+1,b-1), (a+1,b),(a+1,b+1)}|(i,j)∈E 根据栅格图构建障碍物矩阵为 则最短路径可表示为 其中,t为实际时间;T为运行最多时间。 由于采摘机器人按八领域行走,故其行走必须满足位移、规避障碍物和行走停止等要求。 1)位移要求:采摘机器人可以向8个方向移动,但每次只能移动1步,故位移必须满足的条件为 |Xi-Xi-1|≤1 ∀t>1 |Yi-Yi-1|≤1 ∀t>1 |(Xi+Yi)-(Xi-1+Yi-1)|≤1 ∀t>1 2)规避障碍物要求:假设障碍物在栅格中的坐标为(r,c),则必须满足的条件为 |(Xi-r)+(Yi-c)|≥1 ∀t>1 3)行走停止要求:当采摘机器人到达目标点后,需要停止前进[10],则必须满足的条件为 |(Xi+Yi)-(Xi-1+Yi-1)|≤|(Xi-1+Yi-1)-(Xi-2+Yi-2)| ∀t>2 基于上述模型,运用蚁群算法,从采摘机器人当前所在点出发,在最短的时间内遍历所有的果树,寻求最优路径[11]。 蚁群算法是指蚂蚁在路径上释放信息素,碰到还没走过的路口,就随机挑选一条路走;同时,释放与路径长度有关的信息素,信息素浓度与路径长度成反比;后来的蚂蚁再次碰到该路口时,就选择信息素浓度较高路径;由于最优路径上的信息素浓度越来越大,最终找到最优路径。 以果树为障碍,遍历采集图像内的全局采摘路径,流程如图3所示。 图3 全局采摘路径规划流程图Fig.3 Flow chart of global picking path planning 路径跟踪需要采用某种控制理论,对采摘机器人的行走速度和方向进行调节和控制,使其按照期望的路线行驶。假设采摘机器人当前的位置为O,期望到达的目标点为P,以Op为目标点坐标原点,以速度v方向为Xp轴,建立XpOpYp坐标系[12],其跟踪如图4所示。 图4 运动模型Fig.4 Motion model θp=arctan2(yp(u),xp(u)) 采摘机器人在期望目标点的位姿为 因此,期望路径与期望速度的关系为 综上所述,当采摘机器人开始行走(即速度v>0)时,采摘机器人的旋转角度、位姿[13]、期望路径和速度不断按照上述约束关系进行更新,从而实现按照期望的路径和速度进行跟踪。 基于上述运动模型,使用PID控制理论对已规划的路径进行跟踪。PID控制应用到采摘机器人的路径追踪过程中,就是对周围环境的识别和分析,并将这些信息整理后循环反馈给控制器,使得控制器发送相应的控制指令,实现采摘机器人闭环行驶控制,原理如图5所示。 图5 PID控制原理Fig.5 PID control principle 其中,wset为底层控制器理论角速度;wout为电机实际角速度。当输入底层控制器的角速度后,微处理器根据比例积分调节器PI输出更新的PWM波,从而输出对应变化的电流[14],驱动电机转速发生相应的变化。 以上述理论为依据,设计一款路径规划-跟踪控制系统,拟基于嵌入式技术实现,一般分为硬件和软件两部分。 硬件部分主要由主控模块、运动控制器模块、图像处理单元、路径规划单元、传感器采集模块及通讯单元和电源模块组成,如图6所示。 图6 硬件框图Fig.6 Hardware block diagram 主控制器选用Exynos4412;运动控制器选用微处理器STM32F407,通过CAN总线与主控制器相连;电机驱动模块选用L298N,根据接收到的PWM波输出电机转速驱动信号;电源模块给主控制器提供4V的电压;WiFi接口用于控制系统与无人机之间的果园图像数据的传输;UART接口用于系统调试;JTAG接口用于软件程序的下载;OTG接口用于U盘烧写文件。 控制系统的软件是将各个部分模块化,其实现框架如图7所示。 图7 软件实现框架Fig.7 Software implementation framework 主控制软件读取传感器收集到的数据,进行PID算法验证[15],并输出控制信号;运动软件收到控制命令后,对电机的转速进行调控,从而控制采摘机器人的行动。 为了验证路径规划-追踪控制系统的可行性,以任意数量、体积大小不同的纸箱代替果树障碍物,任意设定采摘其机器人的起始点和目标点,并做如下规定:若在实验中采摘机器人碰撞果树,则视为未通过;若采摘机器人未按照期望的路径行驶,也视为未通过。改变纸箱的位置,形成不同的障碍结构,共进行10组实验。其中,一组具有代表性的栅格图像如图8所示。 图8 仿真栅格图Fig.8 Simulation Grid 对应该该栅格图的实验数据如表1所示。 表1 实验数据表Table 1 Experimental data sheet 对表1的实验数据进行分析可得:采摘机器人按期望路径安全到达目标点的概率在90%以上,平均通过率为94.5%,实际路径与期望路径的误差控制在0.244m之内。这表明,控制系统能够有效进行路径规划,并实现精准跟踪。 针对果园采摘机器人在采摘作业时路径规划及路径跟踪问题,提出了相应的解决方案,并设计了一款路径规划-跟踪控制系统。实验表明:系统能够快速寻找出相对平坦且距离最短的路线,提高了采摘机器人的作业效率,为智能化采摘机器人的推广提供了参考依据。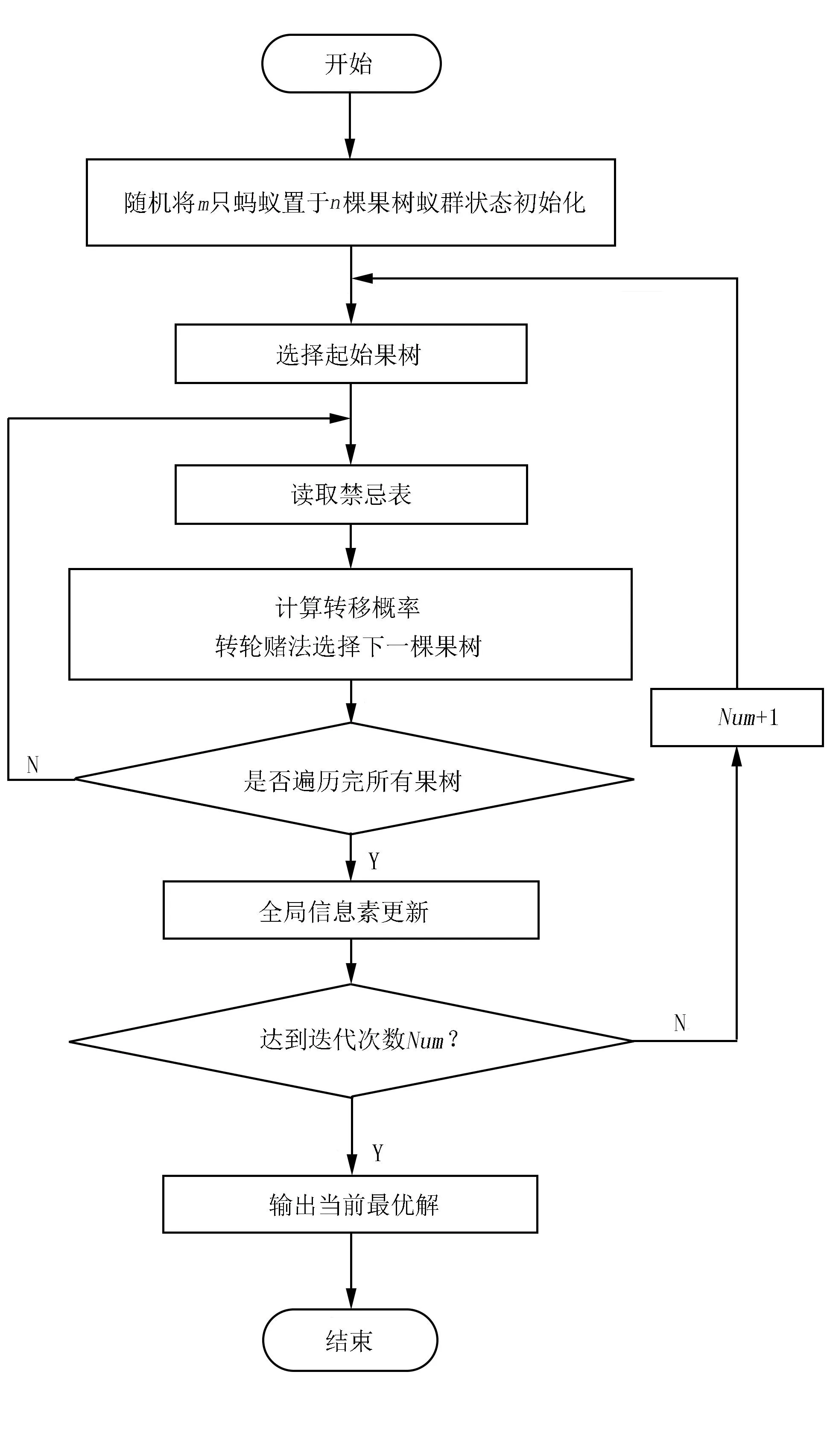
4 基于PID闭环控制的路径跟踪


5 路径规划-跟踪控制系统的设计
6 实验结果与分析
7 结论
