船式拖拉机直线工作参数优选研究
2024-01-09黑晓涛瞿兆杰张道德
张 超,黑晓涛,瞿兆杰,张道德,2
(1.湖北工业大学 农机工程研究设计院,武汉 430068;2.湖北省农机装备智能化工程技术研究中心,武汉 430068)
0 引言
在南方水田中,履带式拖拉机、轮式拖拉机等传统动力机械工作时会导致水田泥脚加深,耕作层破坏,形成较多暗沟,从而造成后续田间作业难以进行[1]。船式拖拉机将“浮”和“滑”原理结合起来,有效地克服了上述问题,在深泥脚水田作业中得到广泛应用[2-5];但是,因叶轮行驶阻力较大、滑转率较高,导致船式拖拉机目前实际作业时驱动效率较低[3]。
许多学者从优化驱动轮结构角度出发对提高船式拖拉机直线作业性能展开研究。R.Beinstein[5]对拖拉机与土壤相互作业过程进行研究,得到了拖拉机接地压比与车轮下陷量之间的关系。王修斌分析了轮刺受力,对叶轮的滚动阻力和推进力进行了理论计算[5]。蒋崇贤通过理论分析和实验对比得到了叶轮作业时驱动力和驱动效率的计算公式,并首次提出以驱动效率作为评价叶轮工作特性的综合指标[6]。何家良设计了一种入土深度调节机构,改善了机耕船对不同泥角水田的适应性问题[7]。韩数丰、李振镛研究了叶轮入土深度、叶片宽度对叶轮推进力的影响[8]。邵耀坚对叶片宽度、驱动面倾角、非驱动面倾角等结构参数对驱动轮和整机的牵引性能的影响进行了分析[9]。陆华忠、罗锡文通过自制土槽实验得到了叶轮所受推进力、支撑力及其驱动效率随叶轮转角变化的规律[10]。张超、江昱等通过光滑粒子流体动力学法设计并研究了单折面叶轮的直线驱动性能,相比直面叶轮,折面叶轮的直线驱动性得到较大幅度提升[11]。
综上可知,目前船式拖拉机相关研究主要是从优化船体和驱动轮结构出发,来提高船式拖拉机直线驱动性能;然而,船式拖拉机工作参数也是影响船式拖拉机直线驱动性能的重要因素,目前鲜有学者研究。为此,以项目组研制的HH709S船式拖拉机驱动轮轮叶尺寸为参考依据,设计并搭建土槽试验,校核模型准确性后,基于离散元法研究单轮叶与土壤的直线作业机理,以轮叶入土角度、入土深度,前进速度为影响因素,以推进力和扭矩为评价指标,从土壤堆积流动角度揭示工作参数对船式拖拉机驱动轮单轮叶直线驱动性能的影响机理,探究工作参数对直线驱动性能的影响规律,并采用多因素法获取直线驱动性能较优的船式拖拉机直线工作参数,最后通过单轮叶损耗功率间接验证了优化结果的可靠性。
1 驱动叶轮结构及入土深度
1.1 驱动叶轮结构
驱动叶轮是船式拖拉机行走部件,主要由轮叶和轮毂组成。轮叶与土壤直接作用,提供驱动力。船式拖拉机田间作业时,轮叶受力可分为垂直于轮叶的法向力FN和沿轮叶切向方向的切向力FT,两者的合力为F;F可分解为水平方向的推进力FP和竖直方向的支撑力FL。当驱动叶轮转角为θ时,驱动叶轮结构及轮叶的受力如图1所示。
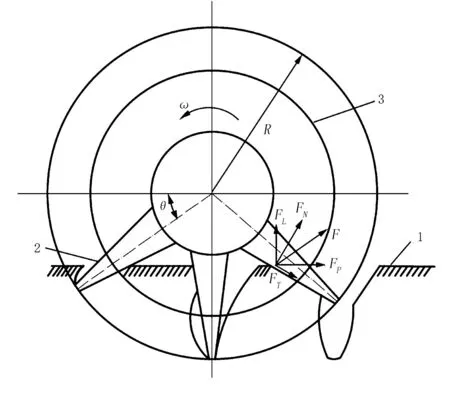
1.土壤表面 2.单轮叶 3.轮毂
1.2 入土深度
驱动叶轮的入土深度h是指轮叶运动直垂直状态时土壤表面到轮叶最下端之间的距离,如图2所示。入土深度影响轮叶受力,具体如下:入土深度较大时,轮叶受土壤反力较大,驱动能力强;但轮叶出土时挑土现象明显,出土阻力也大,轮叶铲泥和刮泥现象严重,导致驱动轮功率消耗较大,驱动效率低,工作性能差。入土深度较小时,轮叶与土壤间的作用力小,船体得不到足够的驱动力,同样也会导致驱动性能较差。在此,入土深度参考文献[5]取h=220mm。为深入研究船式拖拉机与土壤作业机理,本文以单轮叶为例进行研究。驱动叶轮三维图如图2所示。
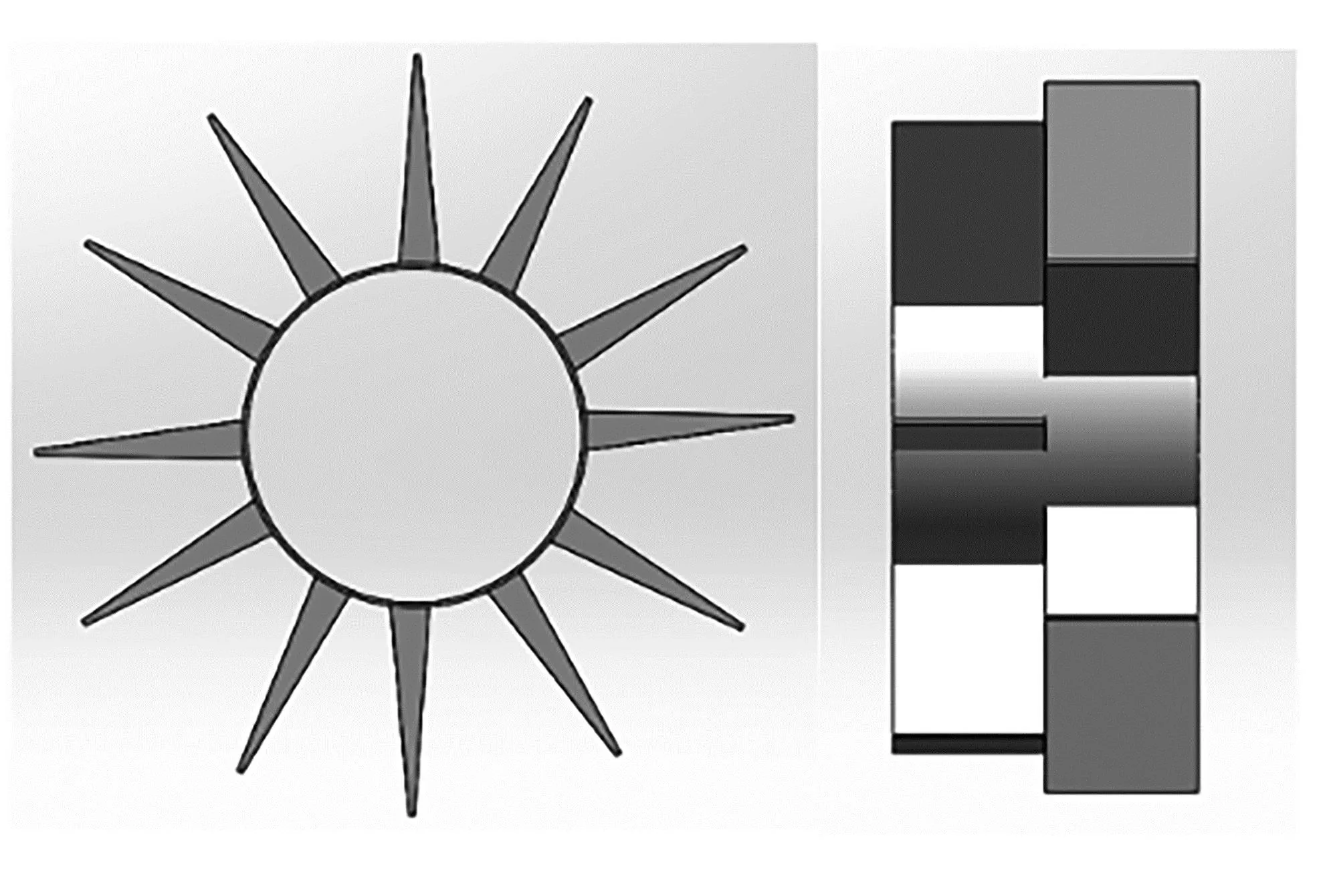
图2 驱动叶轮三维图Fig.2 Three dimensional diagram of driving impeller
2 离散元仿真
离散元法(DEM)自问世以来,在研究非连续介质力学问题上体现出无可替代的作用[12-13]。在研究农业机械与土壤相互作用时,有限元法难以准确模拟出土壤与机具相互作用时土壤流动和破裂的动态过程,导致设计方法与实际结果相差较大;而离散元法能够更好地展示田间作业时农业机械受力和土壤的流动情况[14],故采用离散法对土壤进行建模。
2.1 土壤模型及性能参数测试
南方水田土壤含水率高、黏性强,为了更加准确模拟该土壤的物理特性,土壤颗粒之间的接触模型选择JKP接触模型。该模型能够考虑颗粒之间粘黏作用及土壤与叶轮轮叶之间的粘附作用,颗粒间的法向接触力FJKR能够根据颗粒间的重叠量、表面粘性力及接触参数采用式(1)~式(4)进行计算。法向接触力FJKR用来表示颗粒间的凝聚力[15-16],即
(1)
式中FJKR—法向弹性力(N);
E—等效弹性模量(Pa);
γ—表面能(J/m2);
R—等效接触半径(m);
α—切向重叠量(m)。
法向重叠量δ可由切向重叠量α换算得到,即
(2)
颗粒间最大间隙计算公式为
(3)
(4)
当颗粒并非实际接触且间隔时间小于δc时,凝聚力达到最大值。凝聚力Fpull-out计算公式为
(5)
为设置土壤—单轮叶离散元计算模型的计算参数,对土壤相关参数进行了试验测试。采用环刀法,经过多次测试得到土壤的密度值为1904kg/m3。采用SL-TSD型土壤测试仪,经过多次测量得到待测土壤含水率为28.58%。运用ZJ型无极调速应变控制式直剪仪多次测量并取其平均值,得到土壤内摩擦角φ=9.11°,内聚力c=12.9kPa。
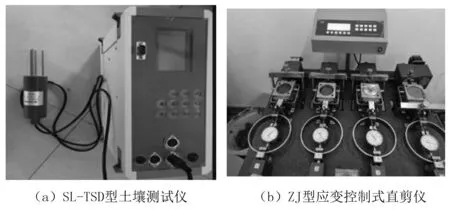
图3 实验测试装置Fig. 3 Experimental test device
2.2 土壤—单轮叶仿真模型搭建及验证
叶轮的顶圆直径为860mm,轮叶材料为45钢,轮叶尺寸为240mm×180mm×6mm(宽×高×厚),驱动面倾角5°,非驱动面倾角4°,入土深度为220mm。土槽尺寸为1200mm×700mm×600mm(长×高×宽),选用直径为8mm均匀球形颗粒模拟土壤,土壤颗粒材料属性以及轮叶与土壤之间的接触参数以前期土壤测试和相关文献为参考依据得到具体数值,如表1所示[17-18]。单轮叶前进速度为2m/s,旋转速度为5.81rad/s,滑转率为20%,仿真时间为0.4s,数据保存间隔为0.001s。土壤与单轮叶离散元模型如图4所示。
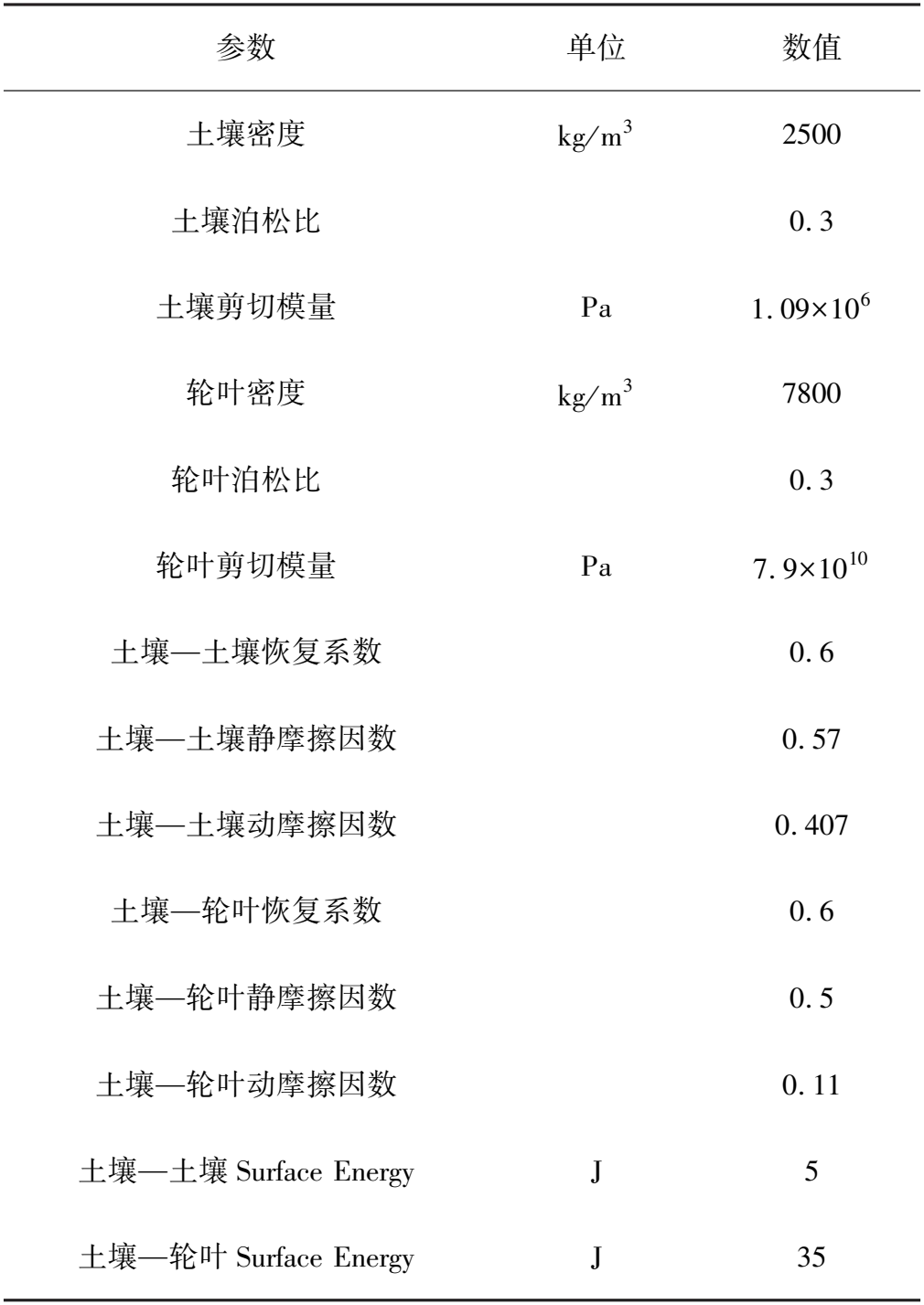
表1 仿真设置参数
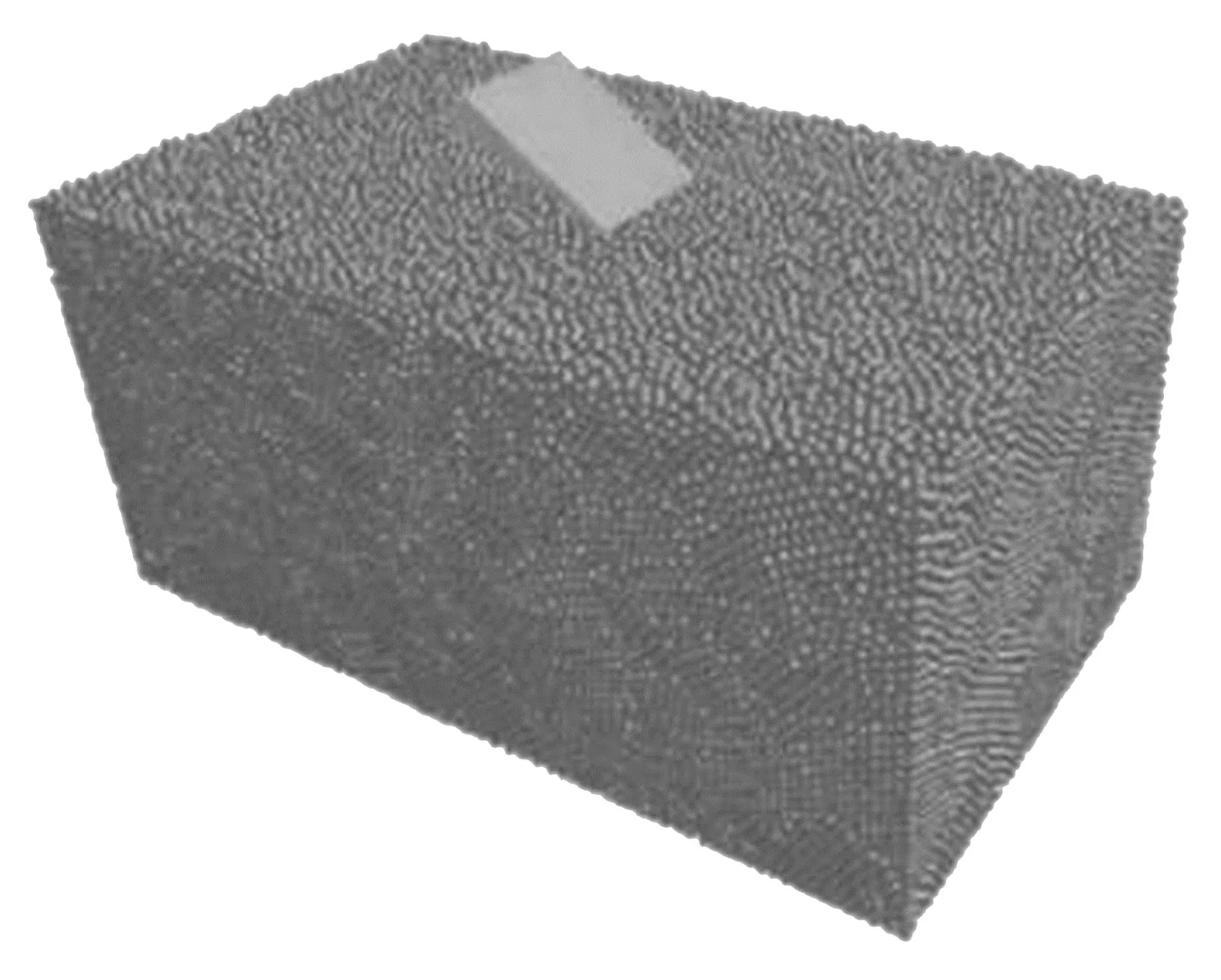
图4 单轮叶与土壤作用离散元模型Fig.4 Discrete element model of interaction between single blade and soil
单轮叶与土壤直线作业过程中,扭矩随轮叶所转角度的变化曲线如图5所示。由图5可知:扭矩在1个周期内呈现先升后降的趋势。单轮叶入土后,随着轮叶剪切和挤压土壤增强,单轮叶扭矩增大;随着轮叶继续运动,推动土壤面积到达最大,扭矩逐渐降低。仿真结果中,单轮叶的扭矩从入土10.46N·m增大到222.084N·m,随后逐渐降低。试验结果中,扭矩从35.22N·m增大到251.86N·m,随后逐渐降低。仿真结果与试验结果扭矩的变化趋势一致,且趋势与文献[19]的研究一致。试验结果在数值上大于仿真结果的原因是由于仿真土壤与实际土壤的团体结构差异导致,由此证明了仿真模型的可靠性。
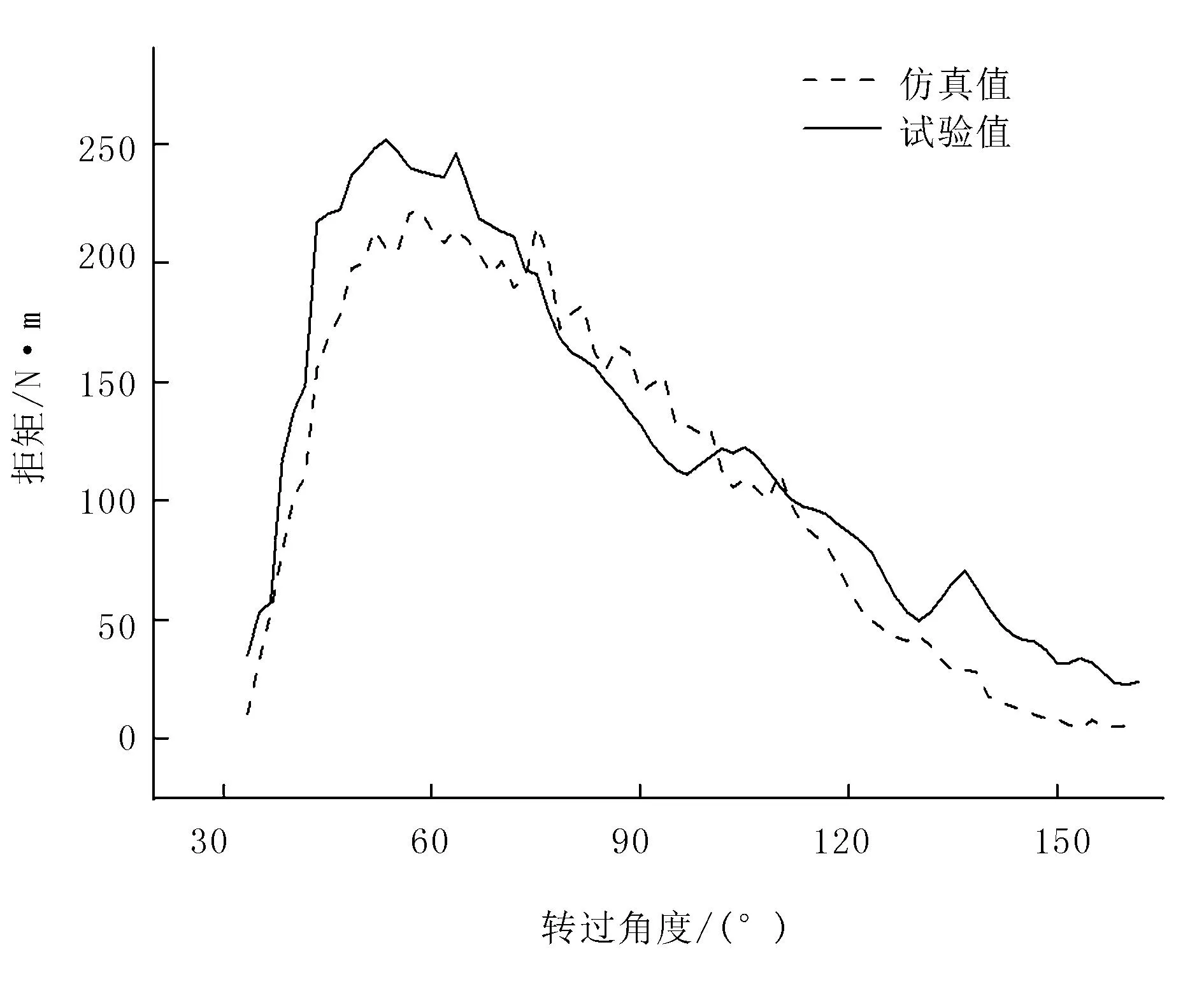
图5 单轮叶扭矩随转过角度变化图Fig.5 Variation of single blade torque with turning angle
2.3 单轮叶—土壤作业机理
单轮叶与土壤直线作业过程主要包括轮叶沿前进方向的直线运动和绕轮毂中心轴的旋转运动。从轮叶接触土壤到完全脱离土壤,轮叶所处的区域位置可分为入土区和出土区。其中,入土区为轮叶尖端从与土壤表面接触到运动至最下位置的区段,出土区为轮叶尖端从最下位置运动到离开土壤的区段。为体现单轮叶与土壤直线作业过程,截取了仿真时间t=0s、t=0.005s、t=0.1s、t=0.16s、t=0.23s、t=0.27s时轮叶与土壤作业速度云图,具体如图6所示。


图6 单轮叶与土壤作用过程的动力学仿真截图Fig. 6 Dynamic simulation screenshot of interaction process between single blade and soil
t=0s时,单轮叶刚与土壤表面接触,轮叶还未运动;t=0.05s时,轮叶开始进入入土区,对土壤开始产生挤压和剪切作用,土壤颗粒被轮叶推动向左边运动,轮叶受到水平向右的推进力,右边颗粒微微隆起;t=0.1s时,单轮叶推动土壤颗粒个数增加,土壤颗粒速度变大,单轮叶向左边挤压土壤现象更加明显,此时轮叶水平朝右的推力极剧增加;t=0.16s时,单轮叶状态接近垂直,轮叶入土深度到达最大,向左边推动的土壤颗粒个数到达最大值,颗粒速度相较t=0.1s时降低,轮叶即将进入出土区,开始出土;t=0.23时,轮叶进入出土区,开始出土,轮叶左边挑土,轮叶右边推土,此时因克服挑土会消耗一部分无用功率,推土导致土壤给轮叶推力方向变为水平向左,阻碍其出土;t=0.27s时,轮叶挑土颗粒个数到达最大值,轮叶向右推土现象更加明显,土壤给其水平向左的推力更大,轮叶即将出土。综上分析,为提高船式拖拉机驱动轮直线驱动性能,必须减小轮叶出土时克服挑土和推土的功率消耗,同时增加轮叶在入土区向左边推动土壤颗粒个数的最大值,以此产生更大的驱动力。
对单轮叶与土壤相互作用进行求解计算,得到轮叶支撑力和推进力的具体数值,经换算得到轮叶支撑力和推进力随着转角的变化曲线,如图7所示。
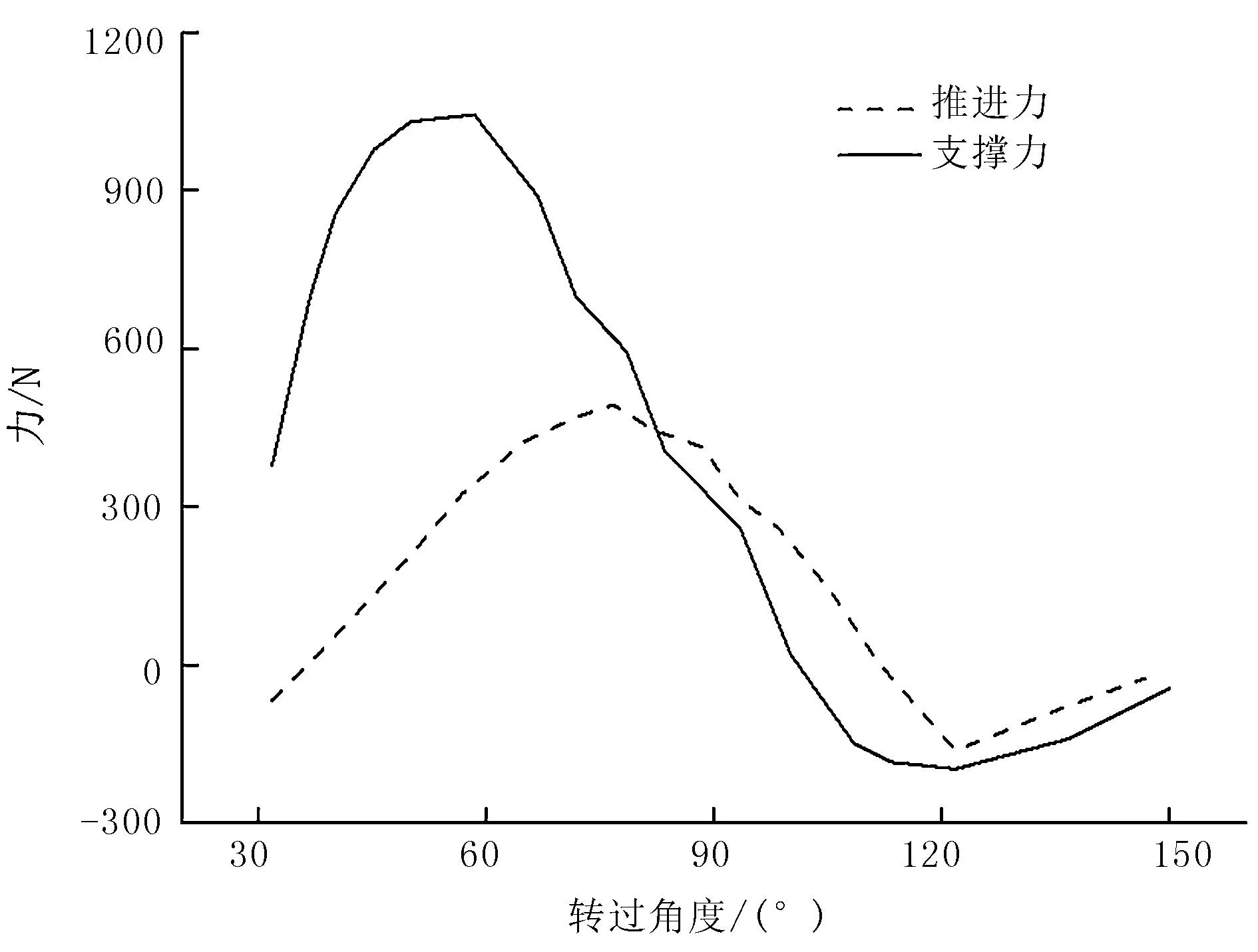
图7 推进力和支撑力随转角的变化曲线Fig.7 Variation curve of propulsive force and supporting force with rotation angle
由图7可知:轮叶在转角为31°时开始接触土壤,由于轮叶与土壤水平面夹角较小,轮叶所受总力在竖直方向的分力较大,且随着入土深度的不断变大,支撑力快速增加,在58°转角时到达最大值,轮叶状态如图6(c)所示。随着轮叶继续运动,轮叶开始出土,支撑力开始降低,由于轮叶挑土,支撑力出现负值,在123°转角时挑动土壤颗粒个数到达最大,支撑力负值达到峰值,此时轮叶的具体状态如图6(f)所示。直到轮叶完全出土,支撑力逐渐变为0。轮叶刚入土时,由于有较大的前进速度,轮叶会推动土壤向右运动,土壤给其反方向的推力,轮叶推进力为负值;随着轮叶继续入土,轮叶向左边推动土壤面积逐渐增大,推进力逐步增加,但相较支撑力增加速度较慢,在转角为79°时推进力到达最大值,轮叶的状态如图6(d)所示。在出土区,由于轮叶向前推土,推进力变为负值,随着推土现象愈发明显,推进力负值到达顶峰;随后轮叶完全出土,推进力数值接近零值。对单轮叶所受推进力和扭矩进行计算,得到推进力为131.69N,扭矩为104.59N·m。
3 仿真试验结果与分析
以单轮叶的入土角度、入土深度、前进速度为影响因素,探究工作参数对船式拖拉机直线驱动性能的影响规律,得到最佳的工作参数,以此提高船式拖拉机的直线驱动性能。
3.1 评价指标
1)推进力Fp。轮叶与土壤相互作用过程中,土壤对轮叶的反力为推进力,该力推动船式拖拉机向前行走或转向,故其值越大,轮叶的驱动性能越好。
2)扭矩T。由实际工况可知,叶轮轮叶推进力Fp不可能无限增大,则引入轮叶转向力矩T综合评定轮叶的直线驱动性能:在Fp一定的前提下,T越大,船式拖拉机在转向过程中的功率损耗就越大[20];在满足船式拖拉机驱动叶轮直线驱动能力前提下,降低轮叶的扭矩能够有效降低轮叶作业过程中的功率损耗,从而提高船式拖拉机的直线驱动性能。其中,T数值可直接从软件中提取。
3.2 单因素仿真试验
根据前期项目组自主研制的HH709S船式拖拉机工作参数的具体范围[11,21-22],展开单因素仿真试验,以探究入土角度、入土深度和前进速度对直线驱动性能的影响规律,寻找最佳的选取范围。
图8分别截取了单轮叶在不同入土角度、入土深度、前进速度下转过角度为123°时的作业速度云图。从宏观角度分析单轮叶堆土和压土现象,结合推进力和扭矩的变化规律,进而得到单轮叶直线驱动性能的优劣,如图9~图11所示。
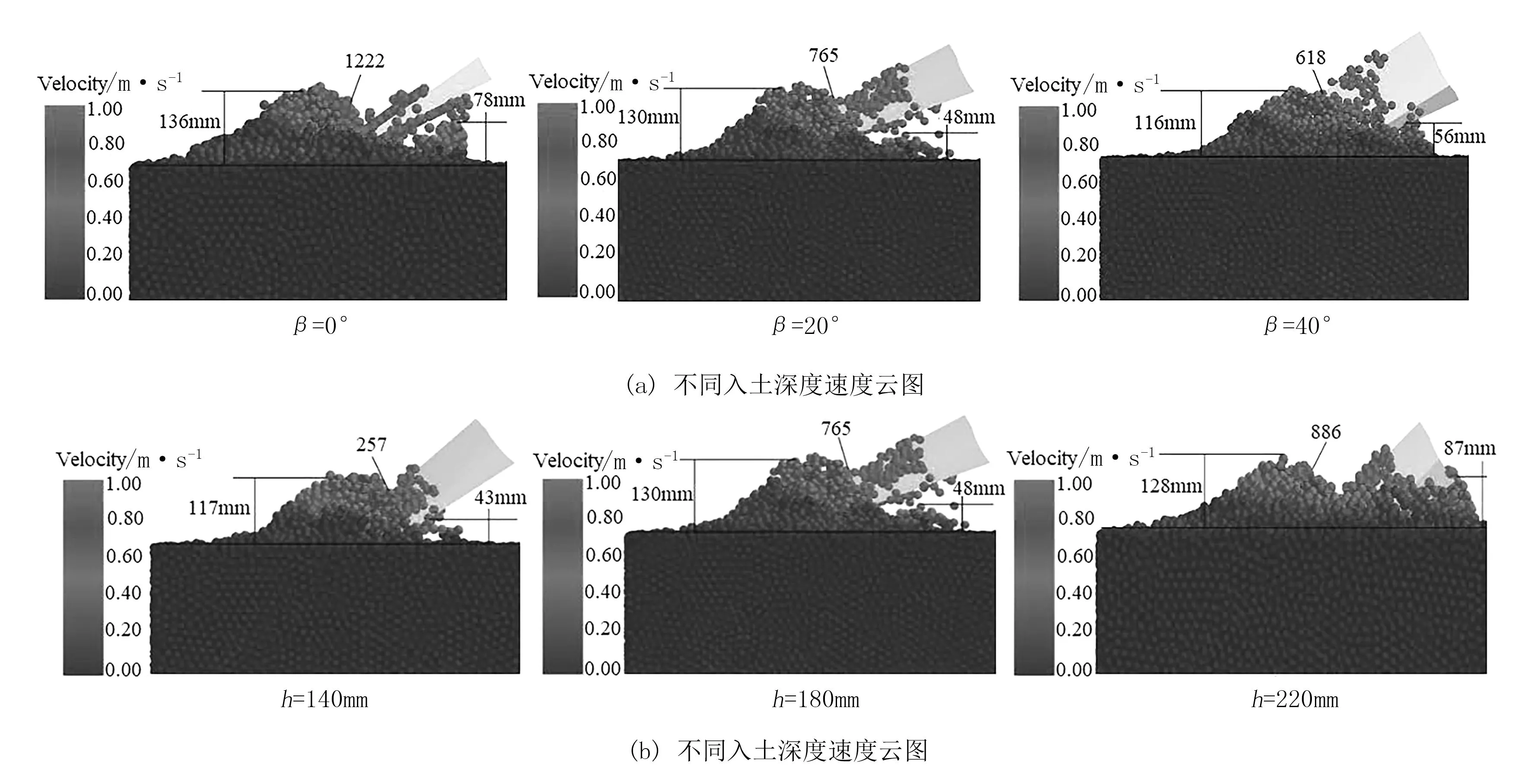

图8 轮叶不同工作参数下速度云图Fig.8 Cloud chart of speed under different working parameters of impeller
图8(a)为当轮叶入土深度180mm、前进速度2m/s时不同入土角度轮叶的作业状态图。由图8(a)可以看出:单轮叶与土壤直线作业时,由于轮叶对土壤的挤压和推动作用,轮叶左右两边会产生一定大小的土堆,左边土堆是由于轮叶从入土到出土整个过程中向左后方推动土壤以及出土时轮叶挑动土壤产生,且轮叶出土时速度较大,被挑动的土壤颗粒速度大。其中,左边土堆一部分土壤颗粒在轮叶入土区已基本形成,土壤颗粒速度基本稳定且数值较小,这部分土壤颗粒给轮叶的反力与轮叶前进速度方向一致,水平朝右,推进力为正值;轮叶右边土堆是由于轮叶出土时前进速度较大,挤压土壤形成,这部分颗粒给轮叶的反力与轮叶前进速度方向相反,水平朝左,阻碍轮叶出土,推进力为负值。当轮叶入土角度从0°增加到40°时,左边土堆高度从136mm降低到130mm,最后变为116mm,出土时挑动土壤颗粒个数分别为1222、765、618个,右边土堆高度分别为78、48、56mm。由此表明:随着轮叶入土角度的增加,轮叶水平朝右的推进力越来越大,轮叶出土时水平朝左的推进力先降低后增加,轮叶挑土现象越来越弱。
轮叶入土深度从140mm增加到220mm时,左边土堆高度先从117mm升高到130mm再降低到128mm,挑土土壤颗粒个数分别为257、765、886个,右边土堆高度分别为43、48、87mm。由此表明,随着轮叶入土深度的增加,轮叶水平朝右的推进力先增加后降低,轮叶出土时水平朝左的推进力逐渐增加,轮叶挑土现象越来越明显。
由图(9)可知:当轮叶入土角度为20°时,推进力为197.69N,扭矩为95.74N·m;入土角度为40°时,推进力为146.1N,扭矩为90.28N·m;入土角度为0°时,推进力为176.09N,扭矩为89.04N·m。这是因为入土角度20°相较0°与土壤作业时轮叶左边产生土堆高度相差不大,推进力正值相差不大;但入土角度为20°时右边土堆高度更小,土壤阻碍作用小,推进力负值较小,推进力整体值最大;入土角度为40°时,由于左边土堆高度下降幅度较大,推进力正值降低大,土壤阻碍作用较大,整体推进力最低。故轮叶入土角度的选取应在20°附近进行选择,以保证轮叶推进力较大时,扭矩增幅不明显。
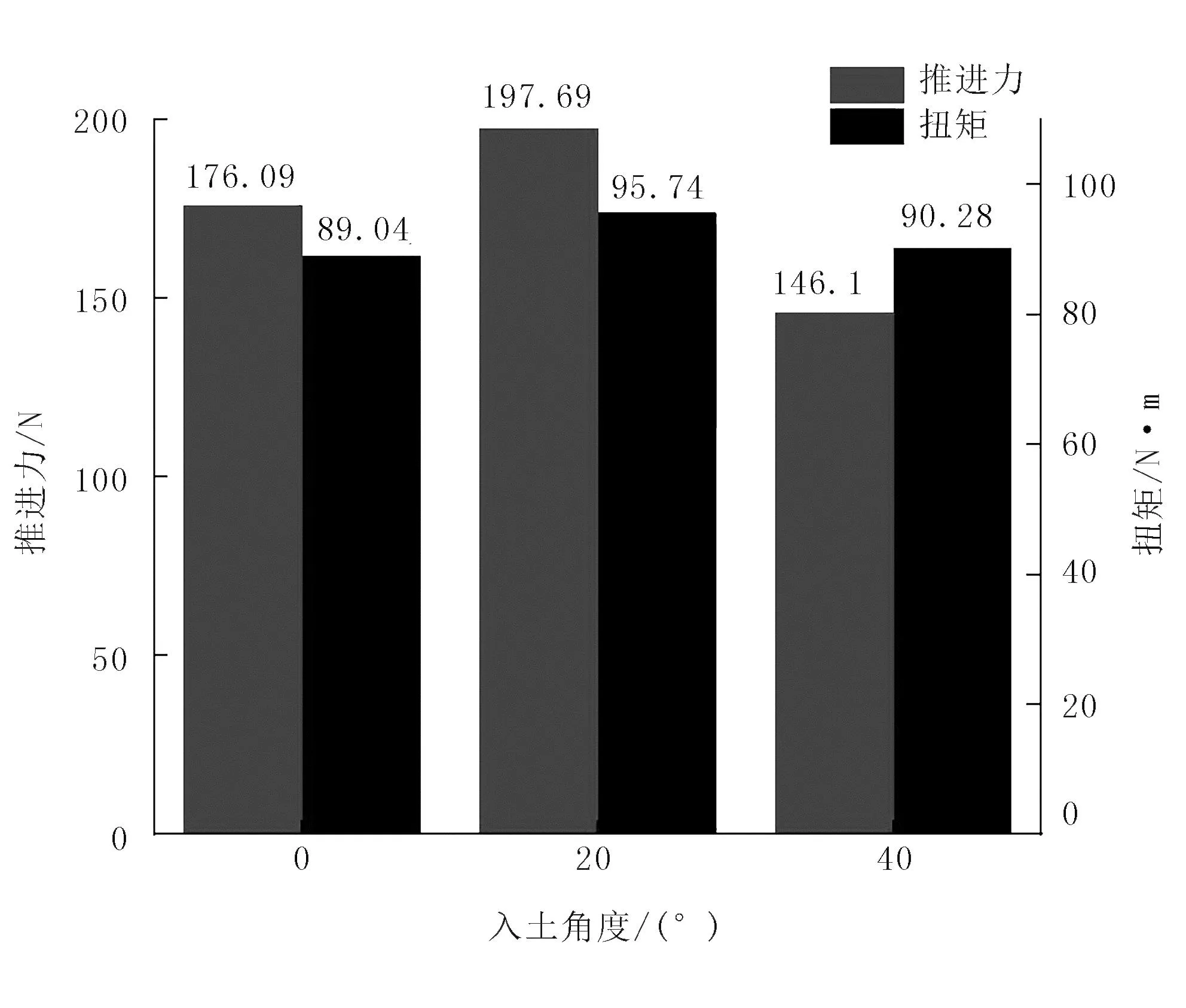
图9 推进力和扭矩随不同入土角度的变化规律Fig.9 Variation law of propulsive force and torque with different penetration angles

图10 推进力和扭矩随入土深度变化规律Fig.10 Variation law of propulsive force and torque with soil depth

图11 推进力和扭矩随前进速度变化规律Fig.11 Variation law of propulsive force and torque with forward speed
由图(10)可知:当轮叶入土深度为180mm时,推进力为197.69N,扭矩为95.74N·m;入土深度为220mm时,推进力为151.37N,扭矩为112.29N·m;入土角度为140mm时,推进力为166.39N,扭矩为74.25N·m。这是因为入土深度180mm相较140mm时与土壤作业时轮叶产生右边土堆高度相差不大,轮叶出土时,土壤阻碍作用相当;但入土深度180mm时轮叶左边产生土堆高度较140mm时高13mm,推进力正值涨幅较大,导致轮叶入土深度为180mm时整个过程推进力较大。入土深度为220mm时,虽然左边土堆高度与180mm差距不大,推进力正值差别不大,但右边土堆高39mm,轮叶出土时土壤阻碍作用最大,推进力负值最大,导致整个过程推进力最低,扭矩大。因此,轮叶入土深度既不能选择太小导致推进力过小、驱动能力不够,也不能选取太大导致轮叶出土时土壤对轮叶的阻碍作用过大、扭矩大、推进力小,直线驱动性能差。综合以上分析,入土深度应在180mm附近选择,既能保证推进力较大,且扭矩增加幅度不大,驱动性能高。
图8(c)为轮叶入土角度为20°、入土深度为180mm时轮叶不同前进速度的作业状态图。由图8(c)可知:当轮叶前进速度从1.6m/s增加到2.4m/s时,左边土堆高度从132mm增加到626mm,挑土土壤颗粒数分别为543个、765个、626个,右边土堆高度分别为69mm、48mm、58mm。这表明,随着轮叶前进速度的增加,轮叶水平朝右的推进力越来越大,水平朝左的推进力先降低后增加,轮叶挑土现象越来越明显。
由图(11)可知:当轮叶前进速度为2m/s时,推进力为197.69N,扭矩为95.74N·m;当前进速度为2.4m/s时,推进力为181.54N,扭矩为102.92N·m;当前进速度为1.6m/s时,推进力为189.45N,扭矩为91.89N·m。这是因为前进速度2m/s相较1.6m/s轮叶左边土堆高度相隔2mm,差别不大,推进力正值大小相当,但2m/s时右边土堆高度小很多,土壤阻碍作用小,推进力负值小,导致2m/s相较1.6m/s轮叶整体推进力大、扭矩大。当前进速度为2.4m/s时,轮叶左边土堆高度降低较大,推进力正值大幅度降低,轮叶右边土堆增加,土壤阻碍作用增加,推进力负值增加,导致推进力降低幅度大较大。综合以上分析,推进力与前进速度并不是正比关系,随着前进速度的加大,推进力增加较小幅度后反而会下降,这与土壤的机械强度以及轮叶与土壤作用时间有关。故前进速度的选取应保证轮叶满足一定驱动能力的推进力下,尽可能降低扭矩,在速度1.6m/s和2m/s之间选取较佳。
3.3 多因素仿真试验
在保轮叶获取较大推进力同时减弱扭矩,展开多因素正交试验分析[23,24,25],以此求解单轮叶最佳的工作参数组合。根据编码后的试验方案分别建模并仿真,试验因素编码表如表2所示,试验方案与结果如表3所示。

表2 试验因素编码
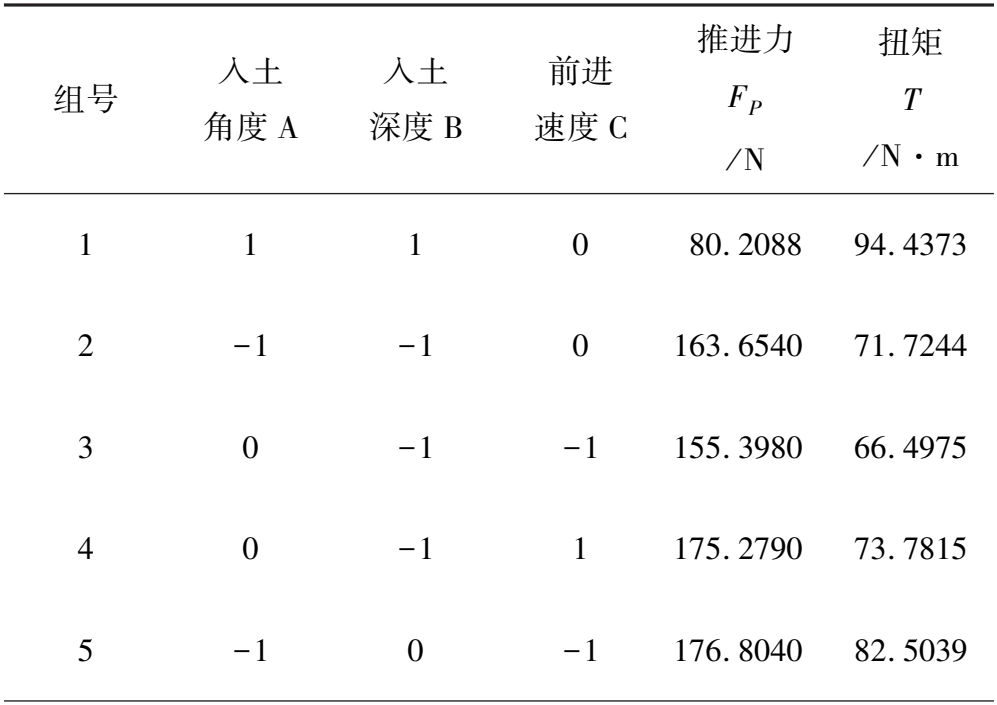
表3 正交试验方案与结果

续表3
根据表3的试验数据,通过Design-expert8.0.5软件得到推进力和扭矩二次多项式回归模型,即
FP=181.65-17.71A-20.72B+6.9C- 2.58AB+1.9AC-3.12BC-20.18A2-
36.96B2+2.97C2
(6)
T=90.9-2.86A+17.1B+6.27C+0.54AB+
0.43AC+2BC-4.81A2-3.54B2
(7)
分别对轮叶推进力和扭矩二次多项式模型进行方差分析,结果如表4和表5所示。
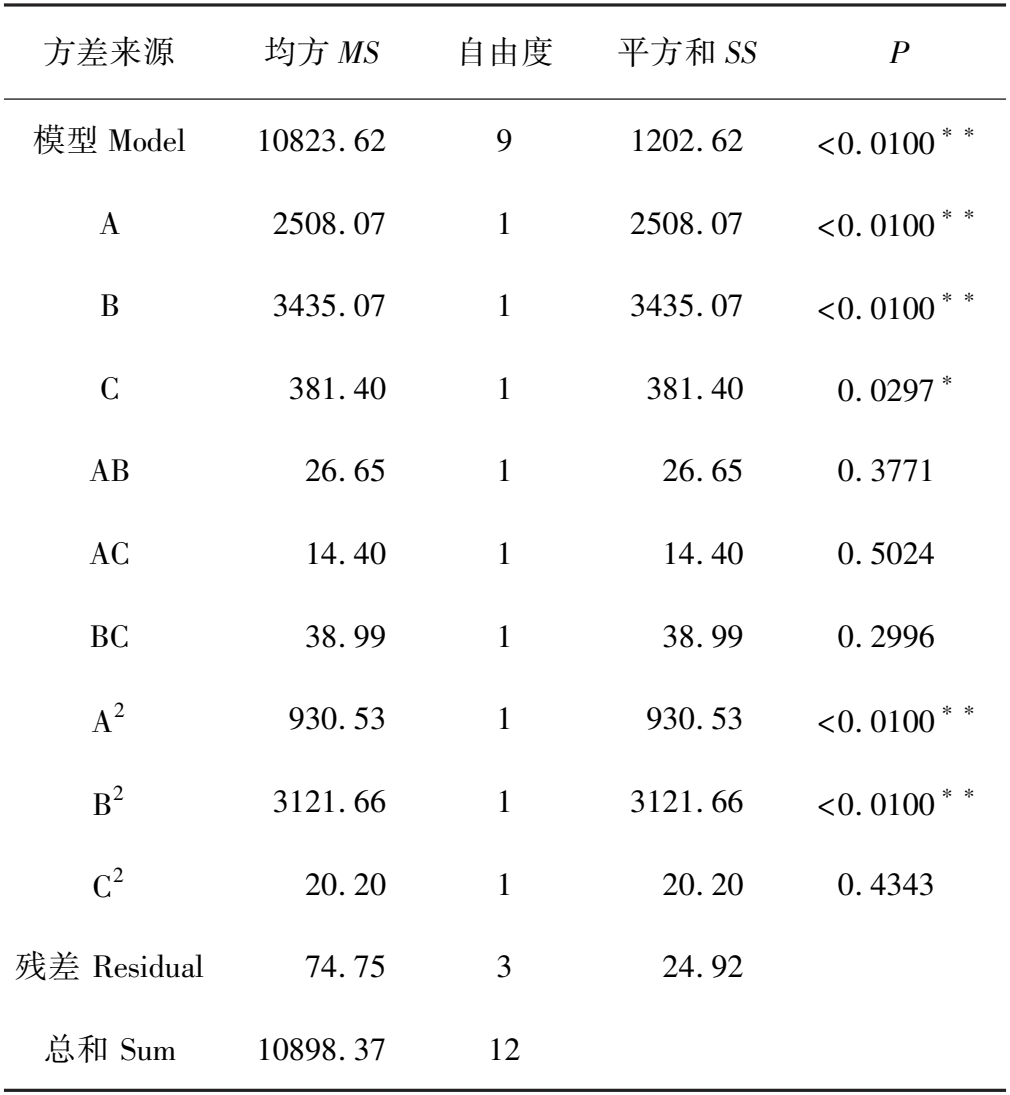
表4 推进力二次多项式模型的方差分析
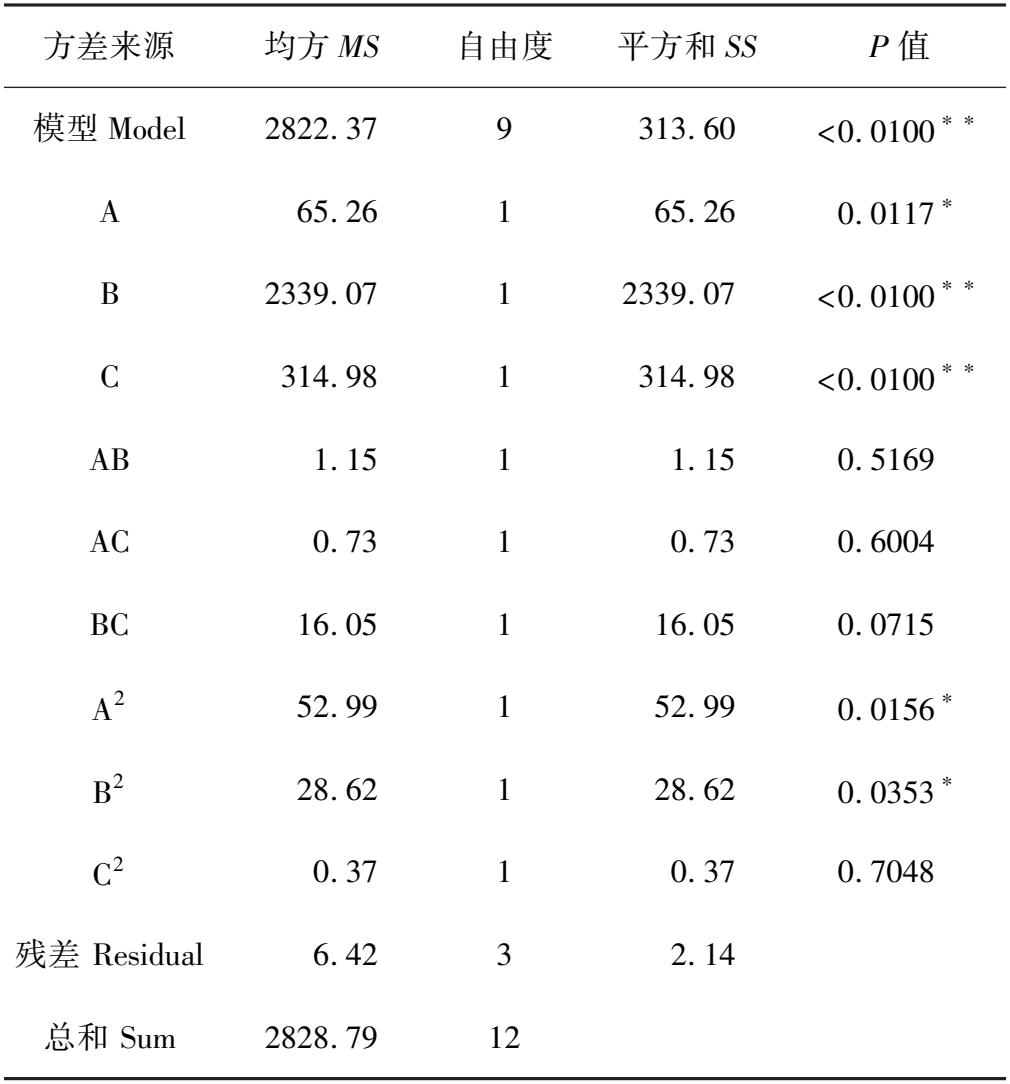
表5 扭矩二次多项式模型的方差分析
由表4和表5可以看出:推进力和扭矩回归模型的P值均小0.01,回归模型高度显著,拟合程度高。由入土深度、入土角度、前进速度的P值可以判断3个试验因素对单轮叶推进力和扭矩均产生较明显影响。试验因素对推进力的影响从大到小依次为入土深度、入土角度、前进速度,对扭矩的影响从大到小依次为入土深度、前进速度、入土角度。
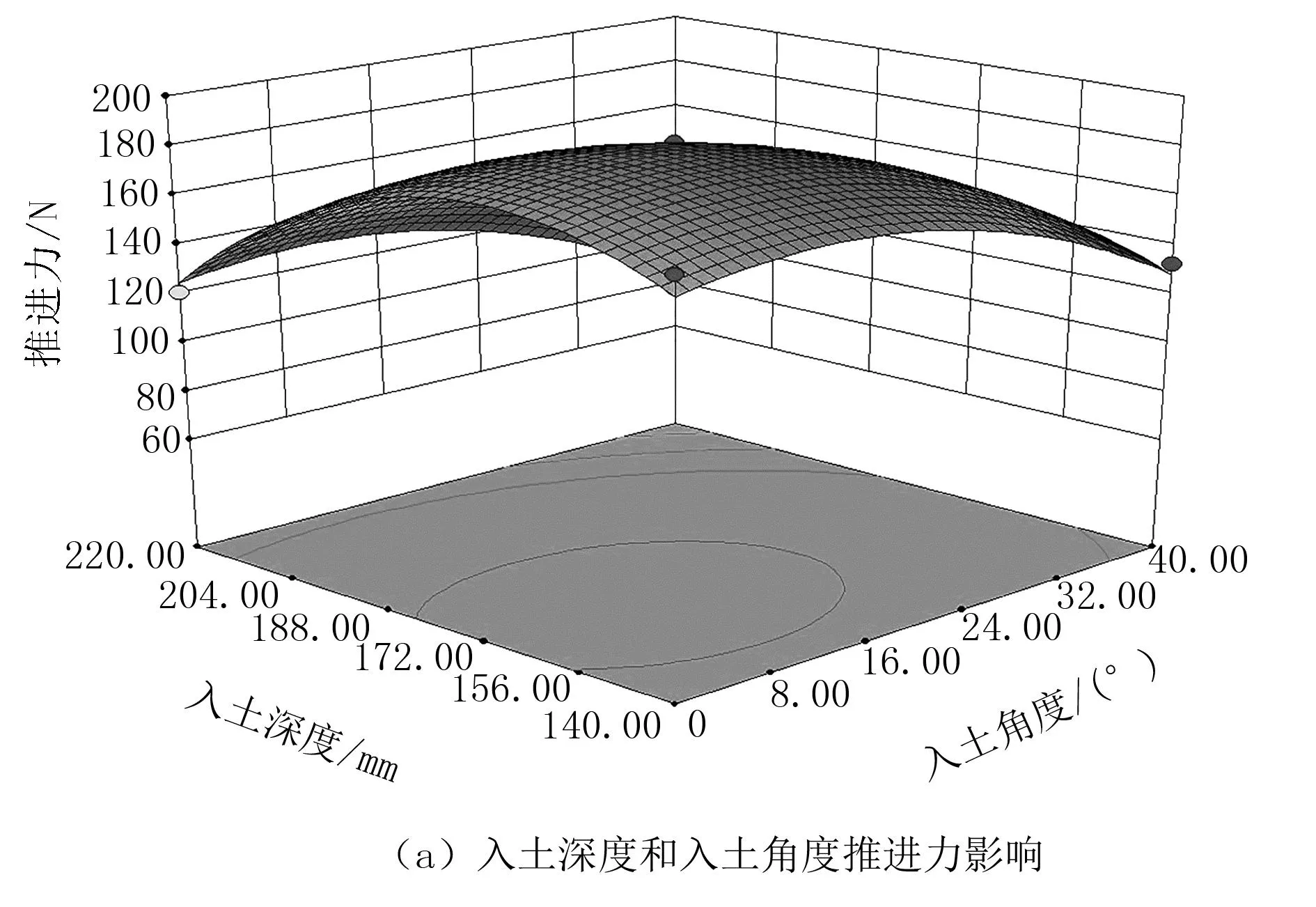
利用Design-Expert软件绘制各因素交互影响的3D响应曲面图。入土深度和入土角度的响应曲面如图12所示。入土角度从0°变化到40°时,推进力和扭矩均先增加后降低;入土深度从140mm变化到220mm时,推进力先增加后降低,扭矩一直增加;前进速度从1.6m/s变化到2.4m/s时,扭矩一直增加,这与4.2节中单因素研究结果一致。
3.4 参数优化结果
对正交试验进行优化分析,在保证轮叶受推进力Fp较大的前提下,选取较小的扭矩,采用多目标变量优化方法[26]建立数学模型。采用响应面分析法对式(8)进行优化分析[27],计算结果表明:当轮叶入土角度为11°、入土深度为147mm、前进速度为1.6m/s时,单轮叶推进力最大为170.93N,扭矩相对最小为70.89N.m,单轮叶的直线驱动性能最佳。为验证正交仿真求解结果的准确性,在最优工作参数组合条件下进行对比试验,求得轮叶推进力为172.51N、扭矩为69.82N.m。推进力相对误差为0.92%,扭矩相对误差为1.5%,由此验证了求解结果的可靠性,相对优化前单轮叶推进力提升了40.82N、扭矩降低了34.77N·m,直线驱动性能得到明显提升。
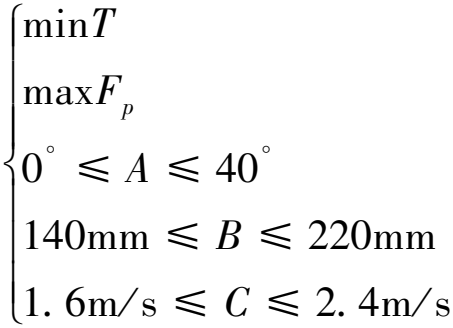
(8)
4 试验结果对比
土槽实验平台主要由盛土土槽、机架、滑轮导轨、驱动装置、传感器、传动装置、数据采集器、挡板等部件组成。盛土土槽具体参数为2m×1.4m×1m(长×宽×高)。卷扬机提供水平牵引力拉动机架,使单轮叶做匀速直线运动。交流伺服电机输出动力,经减速器、扭矩传感器、传动轴使单轮叶进行旋转运动。试验前先连接所有工作部件。扭矩动态测控仪用24V电源供电,将扭矩动态测控仪用通信电缆与扭矩传感器连接,用485USB线将扭矩动态测控仪与笔记本电脑的采集软件相连接。轮叶装配在传动轴的套筒上,利用螺栓固定轮叶,具体如图13所示。
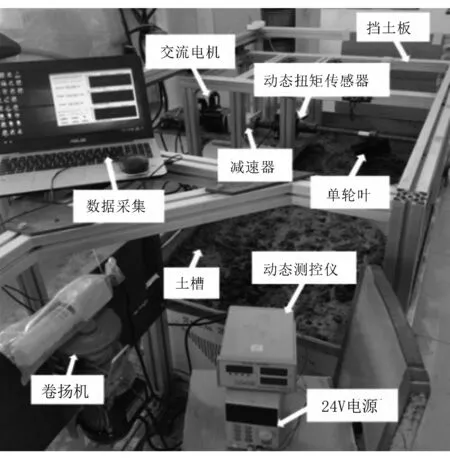
图13 土槽实验装置Fig.13 Soil tank experimental device
为验证仿真所求工作参数的可靠性,通过数据采集软件实时采集单轮叶与土壤直线作业过程中损耗功率间接来反映单轮叶直线驱动性能的优劣,将优化前后的损耗功率绘制成数据曲线,进行对比,从而确定优化结果的准确性,如图14所示。

图14 优化结果试验验证图Fig.14 Test verification diagram of optimization results
由图14可以看出:随着轮叶与土壤直线作业,损耗功率均呈现先增加后降低的趋势变化,单轮叶工作参数为11°-147mm-1.6m/s(优化后)相较0°-220mm-2m/s(优化前)损耗功率数值明显降低。这表明,单轮叶工作参数为11°-147mm-1.6m/s时,单轮叶直线驱动性能优于优化前,间接证明了优化结果的准确性,同时再次验证了本文所建立的土壤—单轮叶离散元模型的可靠性。
5 结论
1)构建了单轮叶—土壤离散元仿真模型和土槽试验平台,校核了仿真模型的准确性,分析了单轮叶与土壤直线作业机理,提出了评价单轮叶直线驱动性能的评价指标。
2)利用多因素法求解单轮叶直线作业的最佳工作参数为入土角度11°、入土深度147mm、前进速度1.6m/s,在此条件下单轮叶推进力明显提高,扭矩明显降低,单轮叶直线驱动性能最佳。
3)在最优工作参数组合下,单轮叶推进力为172.51N、扭矩为69.82N·m,优化前单轮叶推进力为131.69N、扭矩为104.59N.m,优化后推进力大幅度提高,扭矩降低明显,单轮叶直线驱动性能得到提升。
4)通过土槽试验对比了优化前后两种工作参数下单轮叶损耗功率的具体情况,得到单轮叶在优化后工作参数下的损耗功率小。由此间接验证了仿真求解结果的准确性,为船式拖拉机工作参数的选取提供了理论指导。
