小型水下无人航行器的下潜过程研究
2024-01-08杨振鑫
杨振鑫
(1. 中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003;2. 清江创新中心,湖北 武汉 430076)
0 引言
无人水下航行器是一项具有重要战略意义的武器系统,其可在边境地区或受到敌方潜艇威胁的区域执行监视和侦察任务。随着海洋强国战略的不断发展和人们对水下世界的持续探索,学者们对水下无人航行器的研究兴趣日益增长[1-6]。通常情况下,水下无人航行器的任务执行阶段可以划分为上浮阶段、下潜阶段和定深航行阶段。其中,下潜阶段在水下无人航行器的航行中具有重要意义,因为它直接影响任务执行的效率。然而,目前关于水下无人航行器下潜阶段的研究成果却非常有限。
无人水下航行器的下潜平稳性和下潜姿态对其后续操作过程具有重要影响[7]。大型无人水下航行器通常配备有浮力调节舱或浮力调节装置,而小型无人水下航行器由于其体积和结构的限制,很难装备浮力调节装置来调整自身的浮力以实现下潜。因此,小型水下无人航行器主要通过水平舵和螺旋桨的配合来实现下潜阶段的任务。
为了填补对小型水下无人航行器下潜阶段研究的空白,本文首先介绍了小型无人水下航行器的基本参数和试验条件。然后,通过试验研究了小型水下无人航行器在不同舵角和螺旋桨转速下的下潜姿态,以期为后续研究提供参考。
1 航行器基本参数介绍
本文试验所用到的水下无人航行器主要由艏部探测段、通信浮标段、导航控制段、能源段、推进段构成,具体实物外观如图1 所示。
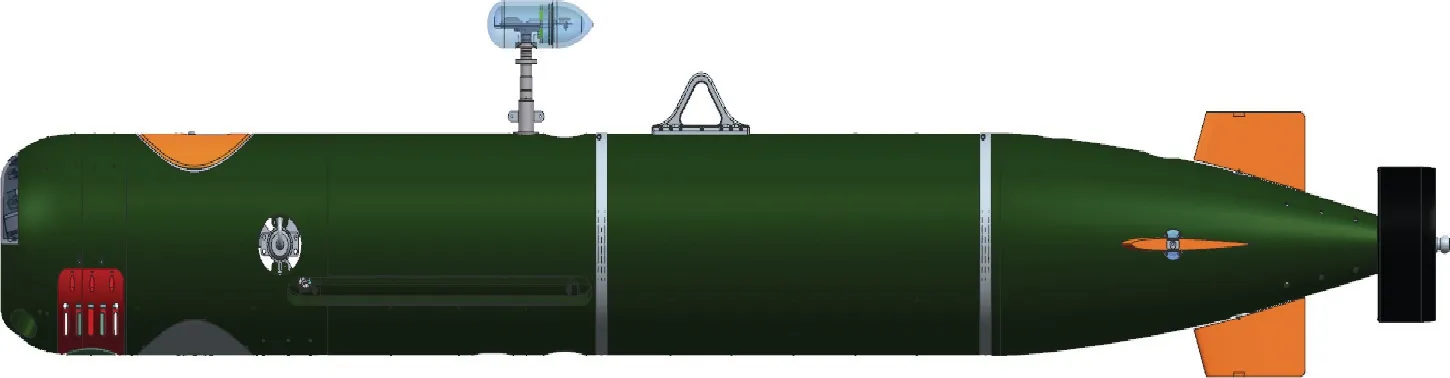
图1 水下无人航行器外形图Fig. 1 Outline drawing of an UUV
水下无人航行器的主要参数包括几何参数、最大舵角和航行时的最大速度。本试验所用水下无人航行器的航行参数列于表1 中。

表1 航行器主要航行参数Table 1 Main navigation parameters of an UUV
水下无人航行器螺旋桨转速与航速的关系如表2。

表2 航行器螺旋桨转速与航速关系Table 2 Relationship between UUV's propeller speed and navigation speed
影响航行器下潜阶段的水平舵板的尺寸如表3。

表3 水平舵板基本尺寸Table 3 Basic dimensions of horizontal rudder plate
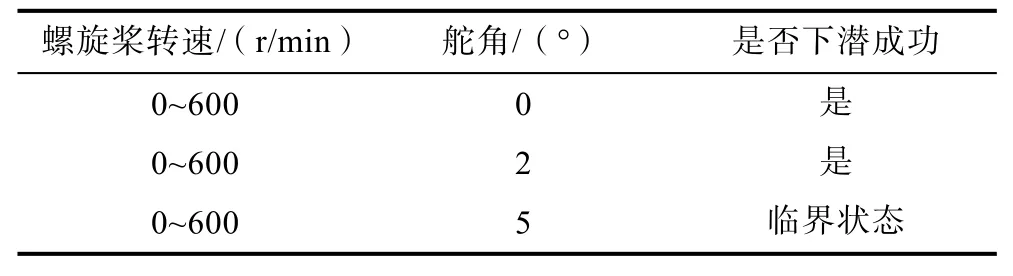
表4 不同舵角下螺旋桨转速0~600 r/min 时的下潜结果Table 4 Diving results at different rudder angles when propeller speed is from 0 to 600 r/min

表6 不同舵角下的下潜结果Table 6 Diving results at different rudder angles
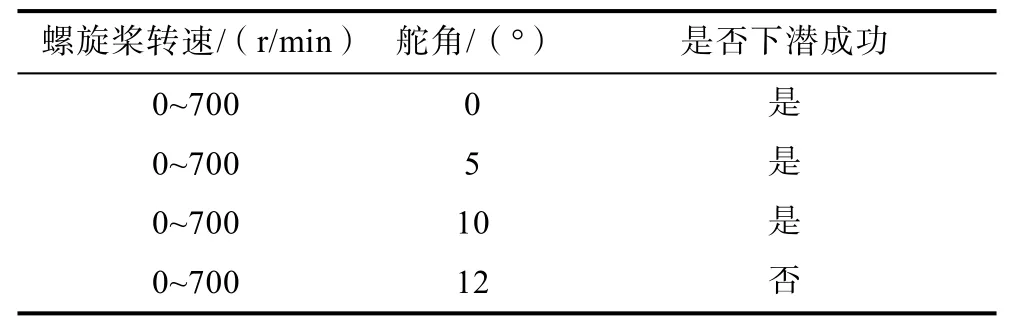
表7 不同舵角下0~700 r/min 时的下潜结果Table 7 Diving results at different rudder angles when propeller speed is from 0 to 700 r/min
表8 不同舵角下0~680 r/min 时的下潜结果Table 8 Diving results at different rudder angles when propeller speed is from 0 to 680 r/min
2 下潜过程机理介绍
通常情况下,航行器的剩余浮力与其质量存在关联。当剩余浮力过小时,航行器容易下潜,导致水面航行变得困难;而当剩余浮力过大时,航行器则难以下潜,无法进行水下作业。本研究中所使用的航行器的剩余浮力一般在0~3 kg 之间。根据以往的试验经验,本次试验中将航行器的剩余浮力调整为1.5 kg。在这种试验条件下,航行器在静水中的俯仰角约为0.3°。此时,航行器的头部仅有极小的面积和尾部舵板露出水面。当航行器在水面上漂浮时,螺旋桨的转速为0,航行器的重心与浮心在一条垂直线上,略高于浮心。具体的受力示意图如图2 所示。

图2 水下无人航行器舵板受力示意图Fig. 2 Diagram of force on UUV's rudder plate
本试验中定义舵板逆时针旋转时舵角为正,顺时针旋转时舵角为负,假设此时舵角为α。对舵板进行受力分析,发现切向分力对航行器产生使其上浮的力矩,该力矩的法向分力对航行器产生使其下潜的力矩。当舵角大于0 时,切向分力大于法相分力,舵板对航行器产生上浮的力矩;舵角小于0时,法向分力大于切向分力,舵板对航行器产生下潜的力矩。
当航行器的航行速度较低时,航行所受阻力与航行速度基本呈线性关系。然而,随着航行速度的增加,航行所受阻力的增加速率也增加,导致航行所受阻力与航行速度之间呈现高次方的正比关系。航行器在行进过程中,水流对舵翼产生升力,从而对航行器施加扭矩,促使其下潜[8]。由于下潜过程中存在复杂的力学因素,影响因素众多,因此很难进行准确的定量分析[9-11]。
本次试验中使用的航行器具有2 种操作模式,即人为手动遥控模式和预先编程模式。在人为手动遥控模式下,操作人员通过手动输入下潜参数、调整螺旋桨转速和舵板舵角来控制航行器。需要说明的是,本文中的舵角指的是影响俯仰的水平方向上的升降舵角,并不包括竖直方向上的方向舵角。此外,航行器还配备了应急措施,即当连续5 s 内无法接收到信号时,航行器会进入应急状态。应急措施包括停止螺旋桨转动并自动调整舵角为20°。因此,若舵角为20°,则表示航行器进入了应急状态。通过观察深度和俯仰角的变化,可以判断航行器是否成功进行了下潜。
在本次试验中,航行器的下潜模式包含2 种。第1 种下潜模式是先设定舵角,然后再设定转速。具体而言,首先调整舵板以使其达到所需的舵角数值,然后给螺旋桨设定特定的转速。第2 种下潜模式是先设定转速,然后再设定舵角。具体来说,首先使螺旋桨转速达到指定值且保持稳定,然后再调整舵板的角度。在本节中,本文将对这2 种下潜模式进行研究和讨论,分别探究它们在航行器下潜过程中的效果和影响。
3 下潜过程试验研究
3.1 下潜参数选择
在本次试验中,本文选取经验值600 r/min 作为螺旋桨的转速,并通过调整舵角来改变UUV 的下潜姿态。当螺旋桨转速达到给定值且航速稳定时,本文开始计时下潜时间。
图3 展示了在不同舵角条件下(0°、–2°、–5°),螺旋桨转速从0 逐渐加速至600 r/min 的加速下潜过程。横坐标表示时间,左纵坐标表示螺旋桨转速,右纵坐标表示升降舵角。图中蓝色线上端水平段所对应的时间即为600 r/min 螺旋桨转速持续的时间,也即下潜时间。
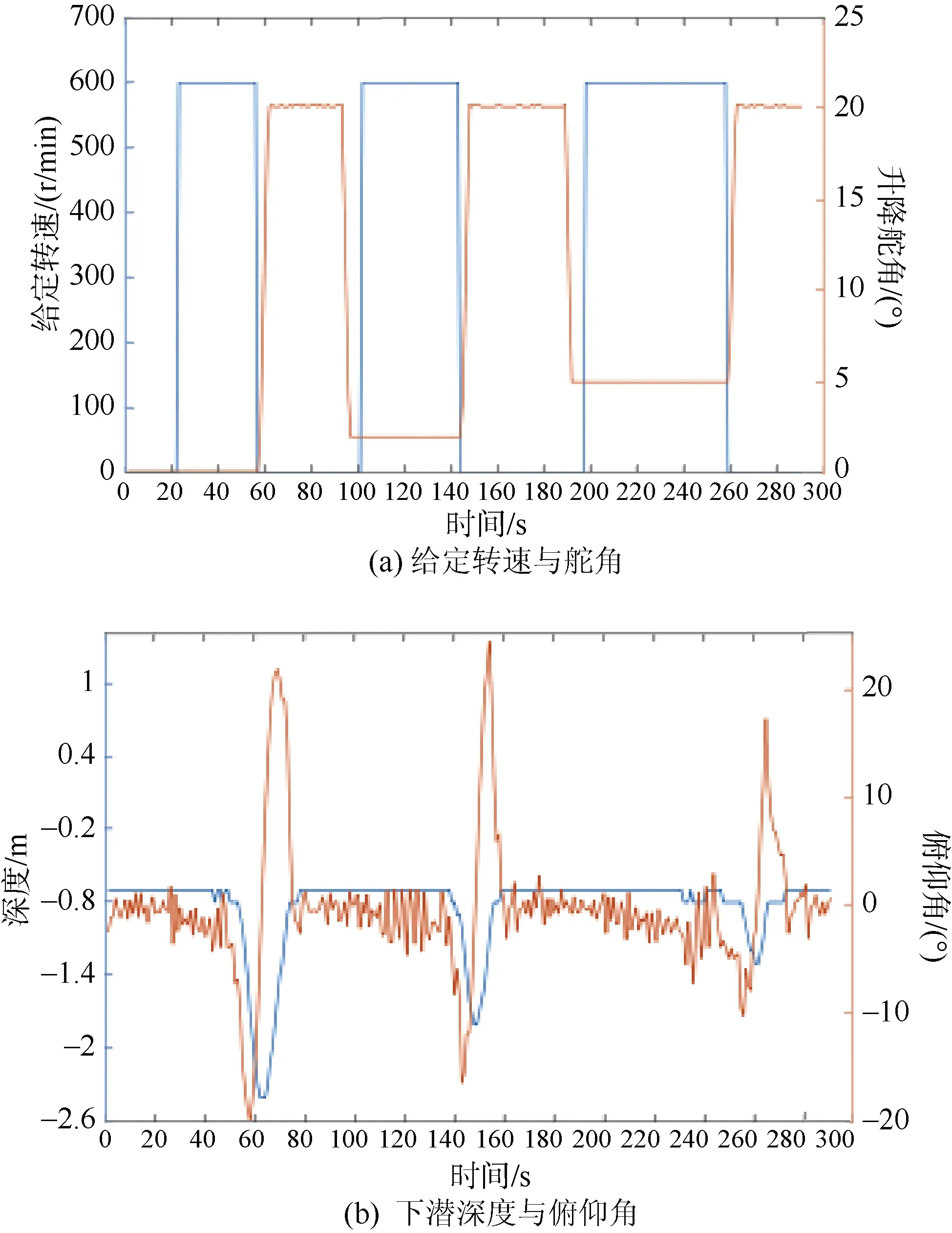
图3 螺旋桨从0 加速到600 r/min 时舵角对航行器下潜过程的影响Fig. 3 Influence of rudder angle on submergence process of an UUV when propeller accelerates from 0 to 600 r/min
需要注意的是,当UUV 静止在水中时,对应的深度为–0.65 m。此外,螺旋桨从0 加速到600 r/min 所需的时间约为1 s,在下潜过程中可以忽略不计。
根据试验数据分析,本文得出以下结论:
1)当舵角为0°时,UUV 的下潜时间约为35 s,下潜深度为2.4 m,最大俯冲角为–20°。从水面观察,UUV 下潜时间较短,一次下潜成功且下潜姿态良好。
2)通过改变舵板角度以增大下潜阻力,本文测试了螺旋桨在从0 加速到600 r/min 时对UUV产生的转矩,并通过转矩计算得出所需的正舵角。这个测试可以为后续航行起步加速过程中所需的最小舵角提供参考。当舵角为2°时,下潜时间约为42 s,下潜深度为1.8 m,最大俯冲角为–16°。UUV 下潜所需时间变长,下潜深度和最大俯冲角减小,但仍然能够顺利下潜。
3)当舵角为5°时,下潜时间约为60 s。从水面观察到,UUV 下潜较为困难,在多次尝试后才缓慢下潜。此时的下潜深度已降到1.2 m,最大俯冲角为–12°。然而,UUV 刚进入水中就开始上浮,推测此时处于刚好能够下潜的临界值。
通过以上分析,本文对UUV 在不同舵角条件下的下潜表现有了更详细的了解,这些数据和观察结果对后续的研究和操作提供了重要的参考。
在第2 种试验方案中,本文采用了以下步骤:首先设置螺旋桨转速为600 r/min,并等待螺旋桨转速达到给定值且航速稳定;然后通过调整舵角来实现下潜,并在舵角改变到指定值后开始计时。根据图4 的分析结果,本文得出以下观察和实验过程。
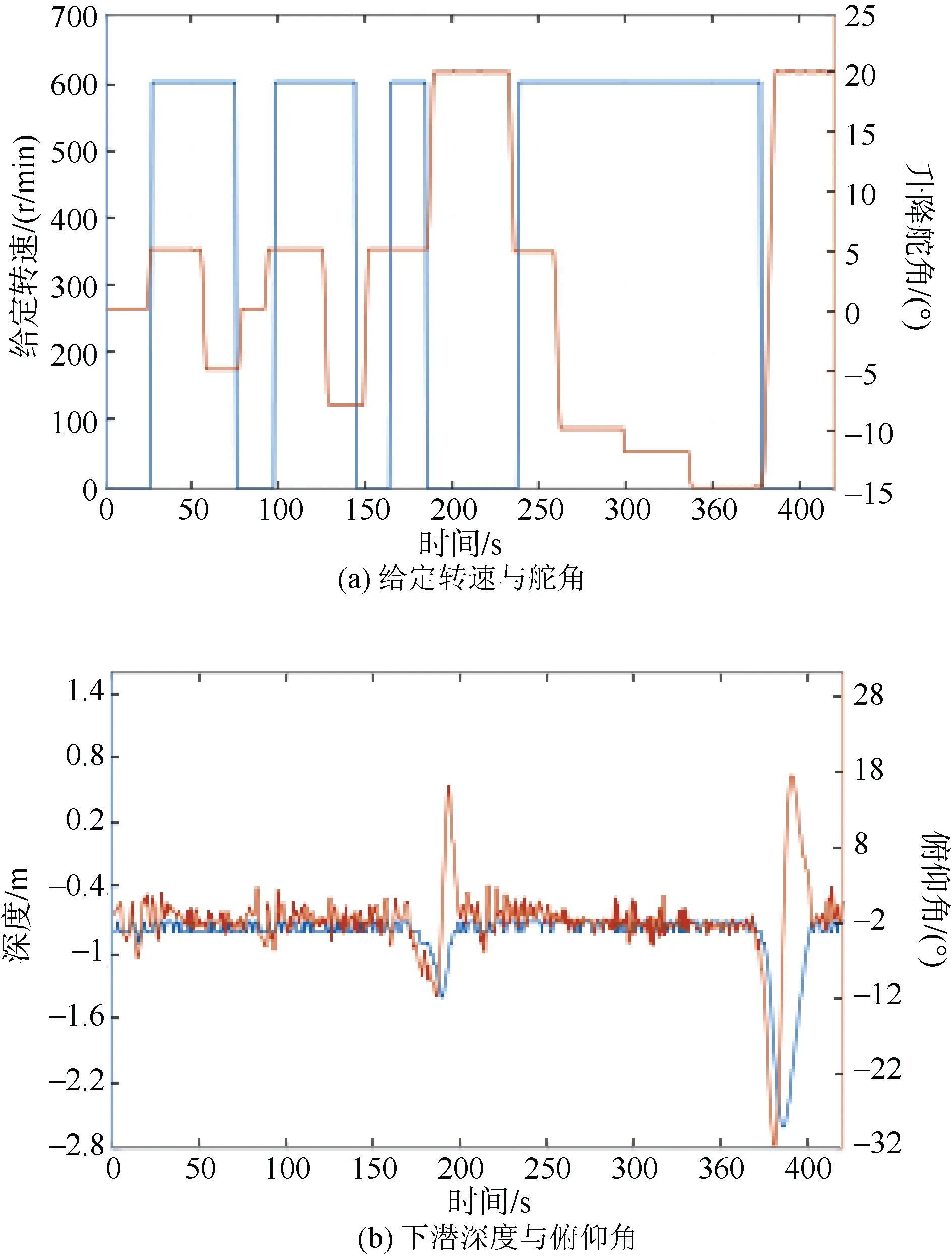
图4 主推转速600 r/min 时舵角对航行器下潜的影响Fig. 4 Influence of rudder angle on submergence when main thrust speed is 600 r/min
1)起始舵角设定为5°。一旦速度稳定,将舵角设置为–5°。经过一段时间观察后,本文注意到UUV 没有下潜的迹象,因此本文停止了螺旋桨的转速。
2)本文将舵角设置为–8°,但UUV 仍然没有下潜的迹象。本文继续尝试不同的舵角设置,直到将舵角设置为–15°时,UUV 才成功下潜。
通过以上观察和实验过程,本文得出结论:在第2 种试验方案中,为了实现下潜,需要将舵角逐渐增大。仅在将舵角设置为–15°时,UUV 才能成功下潜。这表明在给定的螺旋桨转速下,较大的舵角对于UUV 的下潜是必需的。这一结果为后续操作和研究提供了重要的参考。
在本节试验中,本文采用了2 种不同的试验方案:第1 种是先设定转速再设定舵角,第2 种是先设定舵角再设定转速。这2 种方案在UUV 的下潜参数上存在明显差异。
当螺旋桨转速从0 加速至600 r/min 时,螺旋桨会对UUV 产生一个扭矩,使其下潜。此时,下潜所需的舵角较小。当螺旋桨转速达到600 r/min时,UUV 处于水面平稳行驶的状态,保持匀速前进。在这种情况下,舵角的改变主要影响舵力的变化。因此,在此时下潜所需的舵角较大。
需要注意的是,UUV 的舵角范围为–25°~25°,在该范围内的舵角都是有效的,即舵力仍然有效。因此,不会出现舵力失效的情况。
综上所述,2 种试验方案下潜所需的舵角存在差异。螺旋桨转速的变化对下潜参数产生影响,而舵角的改变主要调整舵力。这些结果对后续操作和研究提供了重要的参考。
3.2 下潜最低转速
当螺旋桨转速由0 升至600 r/min 时,UUV 下潜时舵角最小为5°,该现象说明螺旋桨提供的推力足够大,因此推断螺旋桨的转速仍有降低空间,于是本小节将开展测试螺旋桨转速为0~500 r/min时UUV 的下潜参数。
在测试螺旋桨转速为0~500 r/min 时,对UUV的下潜参数进行了分析。根据图5 的结果,采用第一种方案,即先设定转速再设定舵角,在螺旋桨转速为0~500 r/min 的范围内,无论舵角设置为–10°、–15°、–20°、–25°,UUV 都无法成功下潜。这表明螺旋桨提供的推力和舵板产生的压力不足以克服UUV 的剩余浮力,导致UUV 一直在水面漂浮。

图5 螺旋桨从0 加速到500 r/min 时舵角对航行器下潜过程的影响Fig. 5 Influence of rudder angle on submergence process when propeller accelerates from 0 to 500 r/min
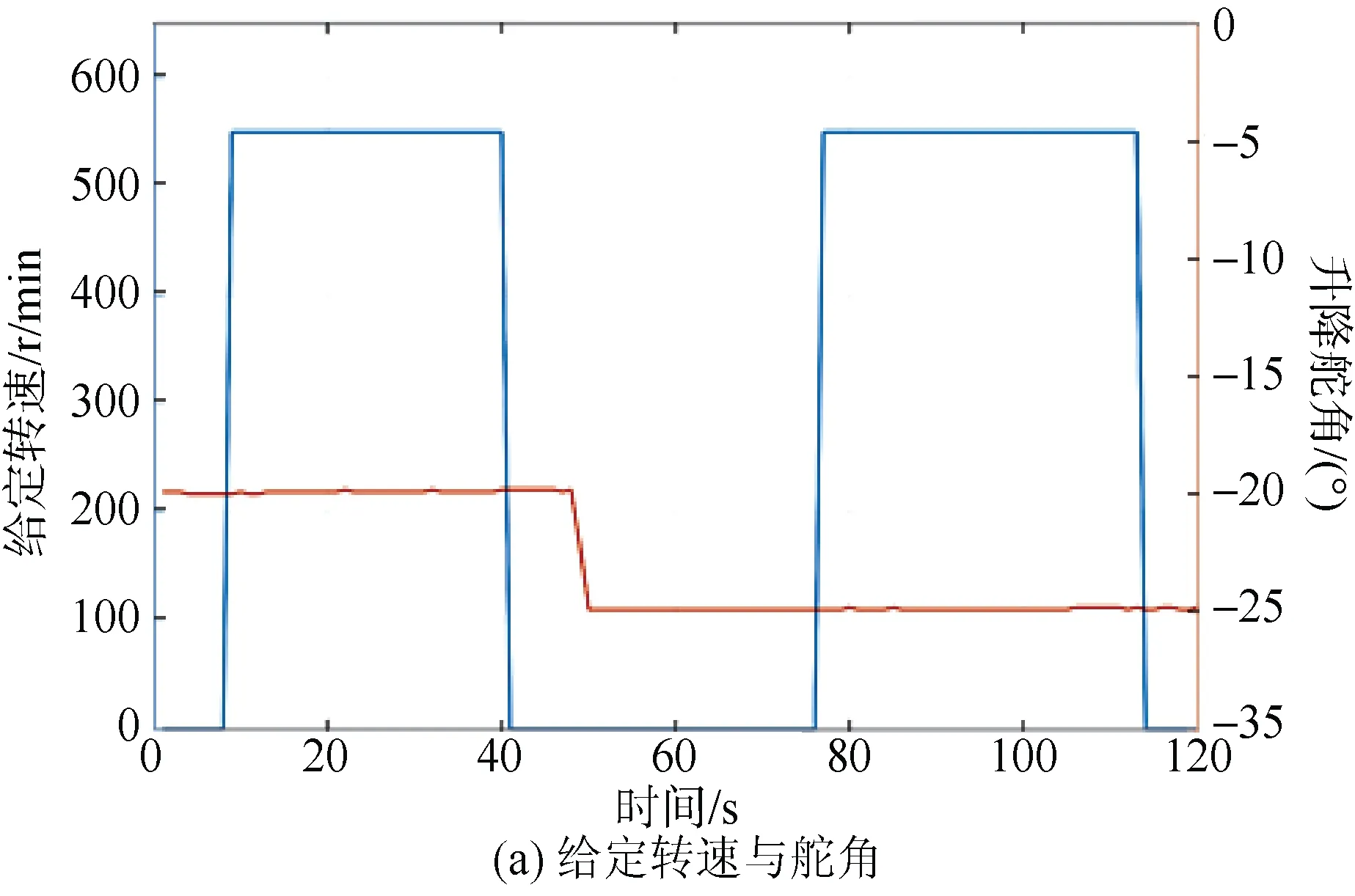
图6 螺旋桨从0 加速到550 r/min 时舵角对航行器下潜过程的影响Fig. 6 Influence of rudder angle on submergence process when propeller accelerates from 0 to 550 r/min

图7 螺旋桨从0 加速到580 r/min 时舵角对航行器下潜过程的影响Fig. 7 Influence of rudder angle on submergence process when propeller accelerates from 0 to 580 r/min
图5 中,深度和俯仰角的变化在30 s 处发生了变化,这是由于被浪拍击造成的。
根据试验结果,第1 种试验方案下潜所需的舵角较小,即舵角设置为最大值时仍无法使UUV 成功下潜。因此,推断第2 种试验方案也无法使UUV成功下潜。
综上所述,通过对螺旋桨转速为0~500 r/min时的试验分析,发现目前所采用的方案无法使水下无人航行器成功下潜。可能需要进一步调整螺旋桨的转速或采用其他的控制策略来实现下潜。
进一步测试螺旋桨转速为0~550 r/min 时,即使舵角设置为–25°,UUV 仍无法成功下潜。这表明螺旋桨提供的推力和舵板产生的压力不足以克服UUV 的剩余浮力,导致UUV 一直在水面漂浮。
继续增大螺旋桨转速到580 r/min,当舵角达到最大值–25°时UUV 成功下潜,此时下潜深度为1.4 m,最大俯冲角为–25°。当减小舵角为–20°时,UUV 无法下潜,增大到–22°时UUV 仍无法下潜。
可以认为,该UUV 下潜所需的最低转速为580 r/min,但此时下潜所需舵角过大,且UUV 下潜姿态不理想。
3.3 下潜最小舵角
本小节研究的目的是增大螺旋桨转速来测试UUV 下潜所需的最小舵角。由上文可知,螺旋桨转速为0~600 r/min 时,UUV 下潜舵角最小为5°,该现象说明螺旋桨提供的推力足够大,因此当螺旋桨转速继续增大时,UUV 下潜所需的舵角会继续减小。
测试螺旋桨转速为0~700 r/min 时UUV 的下潜参数并将结果绘制于图8 中。通过图8 分析得,当舵角从0°增加到10°时,UUV 始终可以下潜,当舵角增大到12°时UUV 无法下潜。

图8 螺旋桨从0 加速到700 r/min 时舵角对航行器下潜过程的影响Fig. 8 Influence of rudder angle on submergence process when propeller accelerates from 0 to 700 r/min
根据实验结果可知,随着舵角的增加,UUV下潜深度和最大俯冲角都在减小,下潜姿态变得越来越平稳。综上,螺旋桨转速为0~700 r/min 时航行器所需的下潜舵角为10°。第1 种试验方案UUV下潜所需的舵角较小,因此可知此时第2 种方案下潜舵角小于10°。
3.4 最佳下潜参数
在UUV 下潜过程中,保持平稳的姿态是一项重要考虑因素。俯仰角和下潜深度应控制在适度范围内,因此在下潜过程中,需要尽量减小舵板舵角和螺旋桨转速,以实现平缓的下潜。然而,为了适应逆流和复杂环境条件下的下潜要求,还需要保留一定的余量。
针对螺旋桨转速为700 r/min 的UUV 下潜情况,使用的下潜舵角为10°,这还有一定的余量可供调整。因此,进行了螺旋桨转速为0~650 r/min的下潜参数测试。在650 r/min 时,螺旋桨的推力大于600 r/min,而理论下潜所需的舵角为5°。然而,根据图9 的观察,即使将舵角从8°减小至–2°,仍无法实现下潜。经过分析,这是由于UUV 受到风浪因素的影响,湖面上的风浪明显增大。即使改变航向并再次尝试,仍然无法成功下潜。

图9 螺旋桨从0 加速到650 r /min 时舵角对航行器下潜过程的影响Fig. 9 Influence of rudder angle on submergence process when propeller accelerates from 0 to 650 r/min
因此,对于UUV 的下潜过程,需要综合考虑舵角、螺旋桨转速和外部环境因素,以确保安全下潜的实现。
鉴于UUV 在实际工作中常面临恶劣天气条件,为确保其在恶劣海况下成功下潜并具备一定的冗余能力,本文进一步增大螺旋桨转速来测试UUV 的下潜参数。
本文进行了螺旋桨转速从0 到680 r/min 的测试,并将结果列于图10 中。通过对图10 数据的分析,实验发现当螺旋桨转速达到680 r/min 时,UUV的航速为2.6 kn。当舵角为5°时,UUV 能够成功下潜;而当舵角为–2°时,UUV 的下潜姿态较为理想,并具备一定的冗余能力,螺旋桨推力和舵角均大于所需的最小下潜参数。从水面观察,UUV 的下潜过程平稳且下潜时间较短。

图10 螺旋桨从0 加速到680 r/min 时舵角对航行器下潜过程的影响Fig. 10 Influence of rudder angle on submergence process when propeller accelerates from 0 to 680 r/min
综合考虑,本文选择了螺旋桨转速为680 r/min和舵角为–2°作为UUV 的下潜参数,并在多种环境条件下进行了UUV 的下潜试验。试验结果较为理想,UUV 的下潜成功率高达95%。
4 结束语
本研究通过在湖上进行试验,对小型水下无人航行器在不同螺旋桨转速和舵角下的下潜过程进行了研究,并得出以下结论:在保持其他条件不变的情况下,UUV 的最小下潜转速为580 r/min,低于该转速时无法实现下潜。随着螺旋桨转速的增加,UUV 下潜所需的舵角减小。当螺旋桨转速高于680 r/min 时,即使是正舵角也能够实现下潜,这为UUV 在水面航行时提供了不下潜所需最小舵角的参考。
随着转速的增加,UUV 的下潜姿态先变好后变差。因此,在选择UUV 的下潜参数时,应尽量选择较低的螺旋桨转速和接近水平的舵角,以实现最佳的下潜姿态和较短的下潜时间。本研究选择了螺旋桨转速为680 r/min 和舵角为–2°作为该UUV的最佳下潜参数。
螺旋桨转速的增加对于UUV 的下潜过程起正向作用,舵板角度的增加对于UUV 的下潜过程起反向作用,通过二者的配合才能使得航行器实现平稳下潜。对于不同的UUV 来说,由于使用场合的不同,螺旋桨的直径和转速以及舵板的结构都存在差异,因此文中提到的螺旋桨转速和舵板角度不具有可直接复制的条件。本文中UUV 螺旋桨转速对应的航速和下潜时的姿态可作为参考,对于小型水下无人水下航行器来说,下潜时航速控制在2~3 kn,俯仰角控制在–15°~–25°之间,舵板角度控制在–5°~5°之间,可以使得航行器平稳下潜,所用时间较短,且下潜姿态较为理想,并具备一定的冗余能力。