多波束测深声呐成像仿真及作用距离分析
2024-01-08潘子英钱汉明
郑 鹏,张 华,潘子英,钱汉明
(1. 中国船舶科学研究中心 水动力学全国重点实验室,江苏 无锡 214082;2. 深海技术科学太湖实验室,江苏 无锡 214082)
0 引言
多波束测深声呐测量效率相比单波束测深声呐有了质的提升,但人们对更大扫宽、更高测深分辨率、更高测量效率的追求是无止境的。目前多波束测深声呐系统已经发展到以美国R2SONIC 公司的R2sonic 2024、挪威康斯博格海事公司的EM2040、加拿大TELEDYNE RESON 公司的Sea Bat T20-P等产品为代表的第5 阶段,目前国内水平正逐步迈入该阶段[1-3]。该阶段的多波束测深系统标志是高分辨率/宽覆盖测深技术、调频技术、近场聚焦技术、Multi-Ping 技术、先进海底检测技术等先进技术的切实应用。
AUV、USV 等无人装备技术的发展,也促进了无人装备搭载多波束测深声呐开展高精度地形地貌测绘应用的发展。本文从无人系统如何选择合适的多波束声呐系统出发,选取了多波束测深声呐的作用距离评估和多波束测深成像特点这 2 个角度进行研究。针对作用距离评估问题,采用混响背景下的主动声呐方程,在相同声源级、相同信号检测阈值、球面扩展损失、界面混响假设前提下,根据Fisher-Simmons[4]获得不同频率的海水吸收系数,计算评估了100 kHz~500 kHz 工作频率多波束测深声呐的作用距离。针对多波束测深声呐成像特点问题,选取了200 kHz 工作频率的多波束测深声呐成像进行了仿真研究,采用线性调频信号、FFT 波束形成算法及脉冲压缩技术实现多波束高效成像[5]。针对FFT 波束形成算法存在的“瑞利限”问题(边缘波束的等效接收基阵孔径小、角度分辨率差),采用插值算法扩充目标角度、并利用Rife算法[6-7]进行角度估计优化,提高成像分辨率。最后通过水平海底、台阶地形下多波束测深声呐仿真的成像结果对多波束测深声呐的成像特点和分辨率进行了分析。通过本文建立的多波束测深声呐距离评估手段和成像仿真方法,可以指导AUV 等无人装备的多波束测深声呐选型和实际作业时的声呐参数设置。
1 声呐作用距离评估原理
声呐方程是声呐设备作用距离的逻辑基础。多波束测深声呐采用高频信号,其噪声掩蔽级小于混响掩蔽级,此时主动声呐方程为[8]
式中:SL 为声源级;TL 为传播损失;TS 为目标强度;RL 为混响级;DT 为混响背景下的检测阈值。下面进行逐项说明。
1.1 声源级
声源级与换能器的辐射声功率、指向性指数有关,其关系表达式为[8]
式中:η为发射换能器的效率,一般在约20%~70%;P为发射换能器辐射的总声功率;DI 为发射指向性指数。船用主动声呐声源级一般在210~240 dB,同时考虑AUV、USV 用多波束测深声呐系统的功率基本在几十瓦量级,在较好的发射指向性条件下其声源级一般在210~220 dB。
1.2 传播损失
传播损失包含扩展损失和衰减损失。扩展损失是声信号向外扩展时声强规律减弱的几何效应导致的。衰减损失则是由海水吸收、散射、声能泄露等效应引起的。针对多波束测深声呐高频、作用距离有限的特点,可以不考虑具体的传播条件,采用球面扩展(损失随距离平方增加)和海水吸收损失近似估计传播损失。其关系表达式为[8]
式中:第1 项为球面扩展损失项;第2 项为海水吸收损失项;α为吸收系数,dB/m;r为距离,m。
1.3 目标强度
考虑多波束测深声呐多采用Mills 交叉阵形(2 条相互垂直的线阵构成),单位波束脚印对应的矩形海底块为探测目标。其目标强度采用矩形曲面近似,其目标强度公式采用下式近似计算[8]:
式中,a1和a2为波束脚印对应的长和宽,且入射方向为垂直入射。
多波束测深声呐一般采用等角测量模式,边缘波束脚印覆盖矩形海底区域大,但掠射角变小,海底反射散射系数较小。考虑各波束脚印大小不一致,且上式限于垂直入射波束的目标强度近似计算。根据目标强度计算的理论公式[8]:
式中:Ii为距目标声学中心1 m 处的入射波声强;Io为距目标声学中心1 m 处的反射波声强Io。根据海底反射系数的定义,反射波声压与入射波声压之比。因此可以借助海底反射系数对不同波束脚印的目标强度作统一的近似处理。海底反射损失系数与海底底质、声波频率及掠射角等有关,该值大小一般约0.1~0.6[9]。
1.4 混响级
多波束测深声呐发射声波,声波到达海底时,由于海底起伏不平的海底地形和沉积物的散射作用形成海底混响。本文采用界面混响描述多波束测深声呐与海底之间的混响级。根据界面混响理论[8],RL 表达式为
式中:Ss为海底界面混响的散射强度;c为海水声速;τ为脉冲宽度;φ为等效合成束宽。
海底界面混响的散射强度Ss与海底底质密切相关,根据文献[8]针对100 kHz 的泥浆海底底质,泥浆底质散射强度约–40 dB,沙石底质散射强度–30 dB 左右。φ可根据文献[8]线阵公式获得:
式中: λ 为波长;l为阵长(l≫λ)。
1.5 检测阈值
对于多波束测深声呐系统,此时其检测阈值与接收信号的信噪比S/N0密切相关,检测阈值可定义为
在回波信号刚淹没在噪声信号中时,多波束测深声呐达到最大作用距离。
2 多波束测深声呐成像仿真算法
多波束成像算法是通过波束成形实现回波数据中有效信息的提取。多波束测深系统的阵元数通常在几十到几百之间,对波束成形算法具有较高要求。因此一般将接收阵元等间距布置,以采用空间FFT 变换进行波束成形。同时为实现远距离目标探测,通常会采用线性调频信号(LFM)提高发射信号平均功率,增大作用距离,并通过脉冲压缩解决声呐作用距离和距离分辨率之间的矛盾。在此基础上,通过虚拟内插阵元技术、目标角度数量扩充、目标角度精度提升和角度估计优化等技术优化以实现高精度成像。
2.1 线性调频与回波信号
LFM 信号(也称Chirp 信号)的数学表达式为
式中:fc为载波频率;K=B/T为调频斜率;信号的瞬时频率为fc+Kt;rect(t/T)为矩形信号,其表达式为
构建多波束测深声呐对点目标的回波信号时,采用以下假设:1)点目标;2)远场条件;3)单个脉冲周期内,目标与声呐之间相对静止。根据上述假设,可根据点目标至声呐中心位置的距离计算不同接收阵元的时延δτm和信号传播引起的幅度衰减bm,代入式(9)可得各阵元接收到的回波信号表达式:
式中,A为发射信号幅值。
2.2 FFT 波束成形
对不同阵元的回波数据s(m,t)进行相位补偿以在角度θ上形成预成波束,并对所有阵元的结果求和,得到θ方向的波束幅值为[10]
利用FFT 变换计算预成波束输出,预成波束的方向与波束号k的关系为。
2.3 脉冲压缩
对宽脉冲进行频率、相位调制,它就可以具有和窄脉冲相同的带宽。上述回波信号的采样时间t与采样点序号n满足t=nfs的关系,因此波束成形后的表达式B(k,t)可离散化为B(k,n)。首先对离散化的波束成形数据和发射信号分别进行时域傅里叶变换:
式中,f= 0,1,2...,n- 1。
然后将Q(k,n)与S(n) 的复共轭相乘,并进行反傅里叶变换,可得脉冲压缩结果:
2.4 基于插值方法的角度扩充
得到脉冲压缩结果后,可以通过插值方法进行角度扩充,以提高最终成像数据的角度分辨率。常用的插值方法中,拉格朗日插值在样本点数较多时会造成数据两端处产生剧烈震荡。线性插值容易导致多波束成像角度不连续的问题。通过分析多波束测深声呐接收到的回波信号经过波束形成和脉冲压缩成像后得到的信号波形特点,其波形在t≤T时,其包络可以近似为辛格函数(Sinc)采用三次样条插值可以获得较好的插值效果。
2.5 角度估计优化
当FFT 离散频率与实际频率不相等时,FFT运算存在栅栏效应与能量泄露,此时信号的实际频率位于相邻2 条谱线之间。本文采用双线幅度Rife算法进行频率估计优化。记波束形成后的角度域上最大谱线k1的幅值为,最大谱线两侧的次大谱线k2的幅值为,则估计频率与最大绝对幅值对应的实际频率的相对偏差为
可得频率的估计值为
转换为频率对应的波束估计值
3 多波束有效作用距离评估与分析
在相同声源级SL、目标强度TS、海底界面混响的散射强度Ss、检测阈值DT 下,根据不同频率的海水吸收损失TL 和混响级RL 带入混响背景下的主动声呐方程计算多波束的有效作用距离。SL取215 dB,TS 根据海底反射系数计算,取海底反射系数为0.5(海底反射后能量减半,TS= –3 dB),海底界面混响的散射强度Ss根据文献[8]取–40 dB。
海水吸收系数采用Fisher-Simmons 公式获得[4]。在深度为0、盐度为3.5%(世界大洋平均盐度)、温度4 ℃、PH=8 的情况下,100 kHz 声波的海水吸收系数约27 dB/km,200 kHz 声波的海水吸收系数约48 dB/km,300 kHz 声波的海水吸收系数约66 dB/km,400 kHz 声波的海水吸收系数约87 dB/km,500 kHz 声波的海水吸收系数约109 dB/km。根据上述数据,对100 kHz~500 kHz 频率的吸收系数进行插值,得到吸收系数随频率的变化的拟合公式:
混响级RL 通过式(6)和式(7)可得,并带入假定条件可得
取接收线阵阵元数目m=128(d=λ/ 2),脉冲宽度τ=0.5 ms,声速c=1 5 00 m s-1。分别取检测阈值30 dB、20 dB 、10 dB、0 dB(信号刚好被噪声淹没)带入主动声呐方程并求解,可得100 kHz~500 kHz 工作频率的多波束测深声呐工作距离如图2 所示。

图2 不同检测阈值下的声呐作用距离Fig. 2 Sonar operating ranges under different detection thresholds
从图(2)可知,DT=0(信噪比S/N=1)的情况下,100 kHz 工作频率的最大作用距离约560 m,200 kHz 工作频率的最大作用距离约360 m,300 kHz 工作频率的作用距离约290 m,400 kHz工作频率的作用距离约250 m,500 kHz 工作频率的最大作用距离约240 m。但在实际使用中,考虑数据质量,需对检测阈值有所要求,考虑噪声信号占回波信号的5%,此时检测阈值取DT=13 dB。此时,100 kHz 工作频率的作用距离约360 m 左右,200 kHz 工作频率的作用距离约236 m,300 kHz工作频率的作用距离约190 m,400 kHz 工作频率的作用距离约170 m,500 kHz 工作频率的作用距离约160 m。
4 多波束成像仿真与分析
考虑128 阵元的多波束线阵长度为64λ,200 kHz 工作频率时线阵长度0.48 cm。无人水下装备,如AUV 宽度一般在50 cm 以内,采用该频率可充分利用AUV 横向宽度并提供较大的探测距离。
采用工作频率fc=200 kHz,线性调频信号取T=4 ms,带宽B=10 kHz,采样频率fs=96 kHz,采样点数32 768,阵元m=128,波束开角为160°,展向波束宽度为1°。
取海底地形为平面,多波束相对海底高度设为H=40 m,可得目标距离和角度为
根据目标点回波型号进行FFT 波束形成(式(11)–(15)),并进行样条插值角度扩充(转化为距离–较少数据后进行插值),Rife 角度优化估计(式(16)–(18)),得到多波束成像数据如图3 所示。进一步采用线性插值转换得到其扇形图,如图4 所示。

图4 水平海底多波束成像扇形图显示Fig. 4 Display of multibeam imaging sector for horizontal seabed
可以看出,边缘波束成像较差。分析其原因是:1)边缘波束信号能量较小(距离远、掠射角小);2)边缘波束信号分辨率差(等效接收基阵孔径变小)。但从图中可以看出在波束开角在120°以内保持较好的成像效果,此时覆盖宽度约4 倍测高。
下面对其距离分辨率进行仿真分析,以水平海底,右侧1 m 深、14.56 m 长的小台阶坑进行多波束测深成像,对其测深分辨率进行分析,其成像效果如图5 所示。从图中可以看出,多波束测深图像清晰的显示了1 m 深的凹坑,采用距离成像时在转化为扇形图时采用了简单的线性插值,会导致图像模糊,难以直接显示距离分辨率精度的变化。

图5 水平海底+1 m 深台阶多波束成像扇形图显示Fig. 5 Multibeam imaging sector display of horizontal seabed with a step of 1 m deep
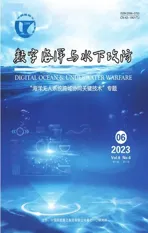
采用上述声呐参数,理论上采用FFT 波束成形并脉冲压缩处理后的距离分辨率c/ 2B与采用100 ms 的CW 短脉冲信号的距离分辨率cτ/ 2一致。以左右侧相差7.5 cm 的水平地形进行成像仿真,并绘制其采样点波束号图像,如图6 所示。左右两侧7.5 cm 的高度差导致了约5 个采样点数的差异,其理论距离为5c/fs=7.812 5 cm。
图6 相差0.075 m 水平海底多波束采样点–波束号显示Fig. 6 Display of multibeam sampling points-beam number for horizontal seabed with a difference of 0.075 m
5 结束语
本文从多波束测深声呐系统与无人装备的适配出发,通过采用混响背景下的主动声呐方程建立了多波束测深声呐的作用距离评估方法,并对不同工作频率的多波束测深声呐在不同检测阈值下的作用距离进行了计算分析,可有效指导AUV等无人装备的多波束测深声呐选型。在此基础上,采用线性调频、FFT 波束形成、脉冲压缩、样条插值、角度估计优化等技术,实现了高精度多波束测深声呐仿真成像。通过直线地形、台阶地形的成像仿真,以及波束图像扇形显示、波束号采样序列显示,对多波束测深声呐的成像特点和分辨率进行了分析。该成像方法可以帮助工程技术人员更直观地理解多波束测深声呐的成像特点,并指导多波束测深作业时的高度、波束开角、信号长度等参数的合理设置。