基于单天线相位和UHF RFID的定位仿真研究①
2024-01-06张成叔
张成叔
(安徽财贸职业学院,安徽 合肥 230601)
0 引 言
随着行业需求的不断变化,促使物联网技术不断发展,室内定位成为新发展方向,在行业中有较大需求,比如定位导览、安全急救等[1]。当前室内定位技术有很多,运用改进支持向量回归算法,实现室内复杂环境下的定位,其定位精度较高[2]。通过超高频射频识别(Ultra-High Frequency Radio Frequency Identification,UHF RFID)系统初始定位移动机器人,然后在自适应UKF方法的作用下,预测、更新状态估计集,提高滤波器的精度,使得定位精度更高、收敛速度更快[3]。将UHF RFID技术和改进LANDMARC算法结合起来,使得能对图书进行实时精确定位,让图书盘点效率得到较大提高[4]。因此,将UHF RFID技术运用在室内定位中,研究无源UHF RFID相位特征,分析单天线相位以为定位的效果,以期能够实现室内精确定位。
1 基于单天线相位的UHF RFID定位
1.1 无源UHF RFID相位获取及特征分析
室内无线电信号在传播过程中,会受到多径效应和非视距的影响,从而造成定位误差[5]。因此,对UHF RFID定位技术进行分析,研究其相位特征前,首先获取相位,进行相位获取上位机软件开发,使其能够对RFID阅读器进行控制。通过配置阅读器参数,自动连接阅读器。阅读器进行标签发射信号解调时,一般采取同相/正交(Inphase/Quadrature,I/Q)信号复解调方式,该方法等效原理图见图1。

图1 等效原理图
图1中,VB(t),VLO(t)分别表示反向散射调制(Backscatter Modulation)信号、本地振荡器(Local Oscillator)信号。在标签对信号进行调制时,VB(t)的公式如式(1)。
VB(t)=ABS(t)cos(ωt+φB)
(1)
式(1)中,AB,φB分别表示VB(t)的幅值、初始相位,S(t)意思是标签内存储的二进制数据序列。VLO(t)经过90°移相器后分为两路正交信号VS(t),VS(t)′。在混频器中VB(t)与VS(t),VS(t)′相乘,再通过低通滤波器经过解调后,得到正交信号VI(t)(也就是I(t)),VQ(t)(也就是Q(t)),I,Q分别为同相(Inphase)、正交(Quadrature)。经过阅读器手法损耗和环境反射后,便会出现信号直流分量IDc和QDc。有I(t)和Q(t)组成基带信号,其数学表达式如式(2)。
(2)
(3)

(4)
式(4)中,φ表示标签反射信号的相位。对φ与标签距阅读器天线的距离之间的关系进行分析,可得相关计算公式如式(5)。
(5)
式(5)中,f意思是载波频率,将光速设置为c,φA意思是附加相移,其产生的原因是由阅读器和标签硬件引起的,信号的传播距离为d,当RFID系统的天线为单天线时,d=2R,R为标签与阅读器天线间的距离。对此,可将式(5)转变为式(6)。
(6)
式(6)中,φ与R存在线性关系。为验证φ会随R成线性周期变化,进行相关实验,设计实验平台,平移导轨有效长度为2.1m,天线工作的频率为920.625MHz,该频率属于中国频段。标签在远离阅读器天线时,移动的步长为0.01m。阅读器在每个测量位置时,读取的数据数量为150组。
1.2 单天线相位的一维定位
在相位信息的基础上,进行UHF RFID一维定位研究。在测距式定位时,选用达到角(Angle of Arrival,AOA)。由于在大范围定位过程中,相位差会受到环境的影响,因此,需要对相位信息进行解模糊。选用空间域相位差的方法,在此基础上,进行进一步的研究。由于天线尺寸要求高,为了节约成本,采用基于相位差的单天线定位。在该方法中,当标签在天线的前方进行水平移动时,能够避免相同周期内相位的解模糊,该方法的定位原理如图2所示。

图2 定位原理
图2中,o,x分别为标签的参考位置和待定位位置,参考式(8),可以知道这两个位置的相位值如式(7)所示。
(7)
式(7)中,φo与φx分别为o,x两个位置的相位值,Ro为o处的标签与阅读器天线间的距离,Rx为x处的标签与阅读器天线间的距离。然后,根据式(9)可知Rx的计算公式如式(8)。
(8)
式(8)中,Δφx=φx-φo,ΔφAx=φAx-φAo与φx,Δφx代表o,x两个位置的相位差,ΔφAx代表o,x两个位置的附加相移差。参考勾股定理,能够找到标签相对o的偏移量,其计算公式如式(9)。
(9)

px=px0+εx+δx
(10)

2 实验结果分析
经过实验发现,标签在远离阅读器天线的过程中,φ会出现线性递减周期变化,每步长0.01m变化大概为22.09°。当R=1m,并标签处于静止时,对应的φ值以及当标签以步长为0.01m移动时,对应φ的均方根误差值,相关结果见图3。

图3 标签不同状态下的反射信号相位或相位均方根误差
图3中,数据组得到的相位值波动范围在4°内。且经计算可知,相位均方根误差值为0.8°。在室内环境中,Ro=1m,通过AOA法和单天线相位法,得到不同参数下校正前后的定位结果见图4。

图4 校正前后的定位结果
图4中,当待定位标签距阅读器天线为1.00m,单天线相位法的计算位置与真实位置相同,均为1.00m, AOA法计算位置比真实位置多0.26m。经校正后,单天线相位法所在位置曲线离真实位置曲线更近,定位精度达到98%。其他参数不变,Ro=1.5m,研究校正前后的定位结果见图5。
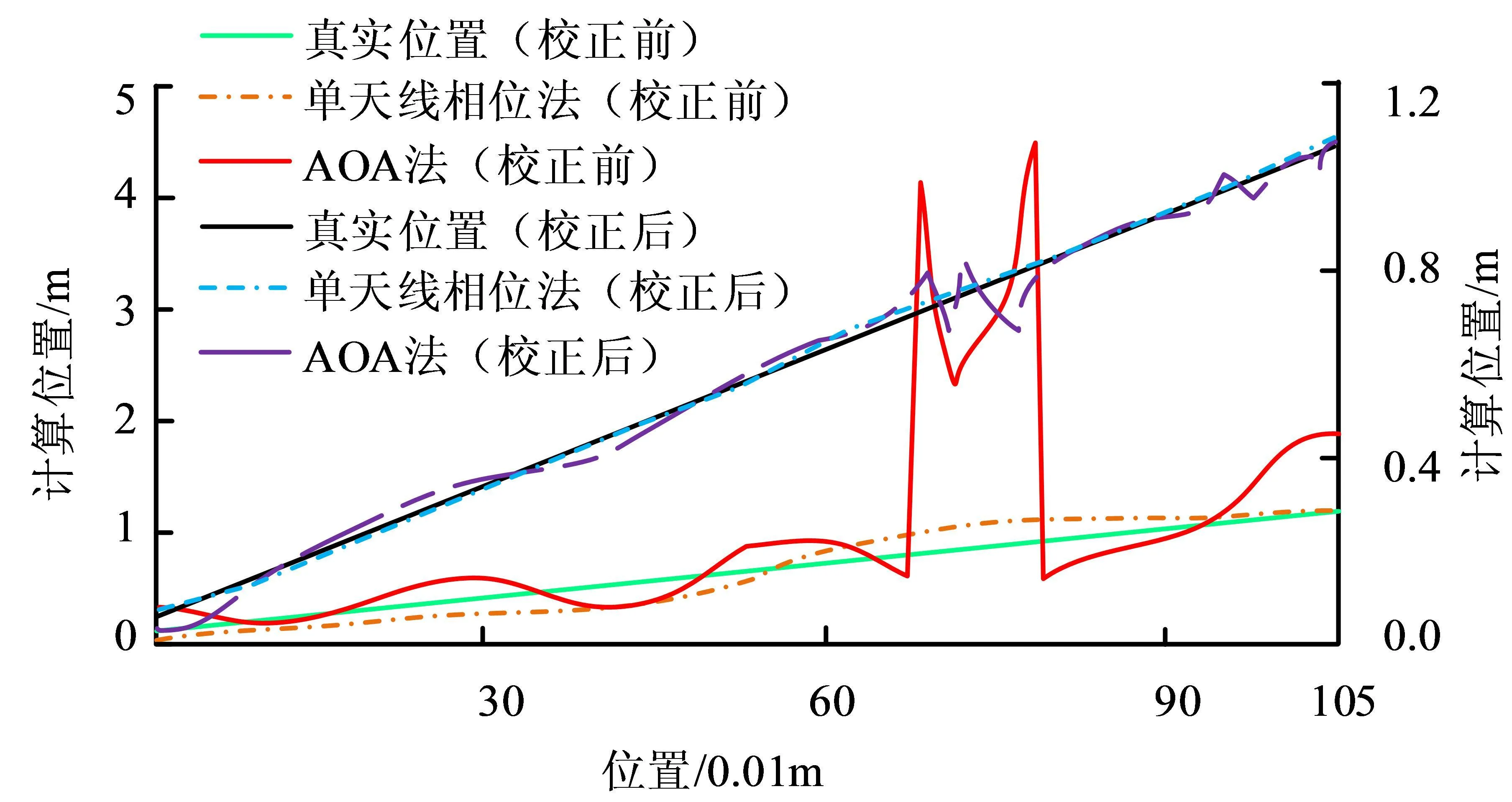
图5 校正前后的定位结果(Ro=1.5m)
图5中,当待定位标签距阅读器天线0.75m时,对应的计算位置为2.87m,比真实位置多2.09m,而此时单天线相位法的计算位置为0.81m。经过校正后,单天线相位法所在位置曲线离真实位置曲线更近,而AOA法所在曲线仍有小部分偏离真实位置直线。总体上,单天线相位法优于AOA法。
3 结 语
为减少无源UHF RFID一维定位的误差,提高定位精确率,对无源UHF RFID相位特性进行分析,开发了相位获取上位机软件,通过阅读器对I/Q信号进行复解调,并接收标签信号相位。采用单天线相位法,实现无源UHF RFID一维定位,并校正误差。结果显示,标签远离阅读器天线时,φ会出现线性递减周期变化,每步长0.01m变化大概为22.09°。在室内环境中,Ro=1m,校正前,相较于AOA法,单天线相位法所在位置曲线离真实位置曲线更近;经过校正后,单天线相位法定位精度变高,定位精度达到97%。而随着Ro的增加,校正前单天线相位法定位误差增大,校正后定位精度较高,可扩大定位范围,增加实验环境复杂度。
