金属结构裂纹损伤Lamb 波定量化成像方法∗
2024-01-05张少东胡伟伟
王 梓, 张少东, 胥 静, 胡伟伟, 顾 磊, 王 强
(南京邮电大学自动化学院、人工智能学院 南京,210023)
引 言
航空航天、高铁等领域工程结构,长期服役于高载荷条件下,容易引发裂纹等结构损伤。为确保运行安全,需要定期进行结构完整性检测。基于无损检测的离线式结构完整性检测既降低了装备的在役率,也无法对运行过程中的结构安全性进行监测,尤其是金属裂纹损伤监测和评估。因此,针对金属裂纹等典型结构损伤的在线监测与定量评估,可以维护结构安全,延长结构使用寿命。
Lamb 波是一种特殊的超声导波,由于其在板结构中传播有低衰减、对小损伤高度敏感等特性,使Lamb 波结构健康监测受到了广泛关注[1-4]。通过把结构无损时的健康信号和结构受损后的损伤信号进行对比分析,可以对结构的受损情况进行判定[5]。对于裂纹损伤而言,裂纹的长度评估和扩展趋势是关注的焦点,同时也是监测的难点[6]。根据现有的研究成果,Lamb 波在结构中传播时,遇到裂纹损伤会出现反射、散射及端点效应等情况,也会导致Lamb 波模态发生改变[7-8]。上述信号变化为损伤的监测提供了丰富的信息。常见的裂纹方向监测方法是建立裂纹长度与信号特征值之间的关系,如小波变换[9]、飞行时间[10-11]及概率重建算法[12]。此外,一些先进的算法,如贝叶斯方法[13]和粒子滤波[14],已被用来预测裂纹扩展的趋势。然而,大部分的研究主要是针对裂纹长度的评估,且方式较为固定,大多在确定裂纹方向的前提下针对性地布置传感器,对裂纹长度进行监测和评估,较少涉及未知裂纹方向的裂纹监测和评估研究。实际工程应用中,结构裂纹损伤发生情况和位置均很难预测,裂纹方向也具有一定的不确定性。
由于Lamb 波监测信号传播通过裂纹时的入射角会随着裂纹发生和发展的情况而变化,信号的后续传播受到裂纹的影响也不同,从而导致无损信号与损伤信号之间的信号差异系数不同。因此,通过分析裂纹损伤反射信号的声场规律,设计合适的监测方式,有望实现任意位置和角度的裂纹损伤。基于上述思想,笔者研究了十字交叉扫描法实现裂纹方向的监测方法,重构裂纹图像并进行评估,为结构健康评估提供必要的数据支撑。
1 Lamb 波传播及裂纹损伤对其作用机理
1.1 Lamb 波基础理论
Lamb 波是平板内由横波和纵波耦合形成的弹性波,根据板中的质点振动轨迹,其传播可分为对称和反对称2 种模式,对应的波动方程为
根据上式可知,Lamb 波波速是关于频率和厚度乘积的函数,对式(1)和式(2)进行求解后,可得到无数解,对应了Lamb 波的多种传播模式。Lamb波存在的多模态传播较为复杂,会给后期信号分析带来难度,因此大多选择单一模态,采用窄带信号作为激励信号抑制频散,利用频率对模态的调制作用,在一定波长范围内选择合适的激励频率[16]。
1.2 裂纹对Lamb 波传播作用过程分析
通过Abaqus 环境下的有限元仿真,可以对结构裂纹损伤引起的Lamb 波信号传播变化进行分析,监测信号传播如图1 所示,其中:A为激励器激励点,S为传感器接收点。

图1 监测信号传播Fig.1 Monitor signal propagation
为验证激励监测信号从不同角度经过裂纹时的影响,建立600 mm×600 mm×3 mm 板结构模型,从3 个不同方向激励信号。当监测路径垂直于裂纹入射时,在A点处激励出的单模态信号,会在裂纹处形成最大反射信号场,如图1(a)所示;当监测信号倾斜入射裂纹损伤时,发生了部分信号反射,透射信号波场加大,如图1(b)所示;当激励信号平行于裂纹损伤时,几乎很少的信号发生反射,S点可以接收到大部分的声场信号,如图1(c)所示。根据上述分析,当监测信号沿不同方向入射损伤时,其反射声场和透射声场具有不同的能量和范围。考虑到结构裂纹损伤发生区域和方向未知,只有通过扫描的方式才能确定损伤的发生和评估,因此需要对压电激励器/传感器阵列布置、损伤信息捕获方式和损伤评估方法等进行针对性的研究和设计。
2 裂纹损伤定量监测方法原理
2.1 裂纹定位与方向判定基本思想
通过对监测通道结构损伤前后响应信号的相关性分析,可以将监测路径中损伤信号相较于健康信号之间差异的部分提取出来。任意位置在结构中出现损伤的可能性,可以通过将差异部分和该位置与传感器之间的距离进行重构来确定。当监测信号沿着裂纹方向传播时,损伤对于信号的影响较小,将会丢失裂纹方向的信息。裂纹扩展到一定程度后,对通过裂纹的监测路径上的信号传播会产生很大的影响,单纯从单条路径上监测信号变化差异性很难客观判断裂纹的方向。因此,综合平行于裂纹方向的监测路径信号传播变化情况,在垂直裂纹方向入射和平行裂纹入射两条互为交叉路径上,具有最大的信号变化差异,据此可以判定裂纹方向。对通过裂纹区域的两两十字交叉的监测路径组合进行扫描,可以找出沿裂纹方向传播的路径,通过修正该路径损伤缺陷的概率,弥补丢失裂纹方向的信息,可以判断出裂纹损伤的方向,并进一步实现对裂纹损伤长度的评估。为了实现这一目标,将从压电阵列设计、裂纹的十字交叉扫描判定以及损伤成像评估3 个方面来进行方法设计。
2.2 压电阵列设计
根据激励传感方式不同,Lamb 波监测可分为Pulse-echo 和Pitch-catch 两 种[17-18]。Pulse-echo 方 式往往并不有利于裂纹损伤方向的判定[10],因此采用Pitch-catch 方式进行监测。常见的传感器布局为分布阵列和环形阵列[19-21]。由于裂纹损伤外形较小且裂纹方向可为任意角度,所以需要从各个方向进行损伤的探测,故研究中采用了环形阵列设计压电监测阵列。环形阵列在布置压电片时需要控制的参数有环形阵列的半径以及传感器的数量,半径大小决定了监测范围,传感器数量决定了裂纹方向监测精度。在一定精度要求下,根据监测对象的大小选择的环形阵列如图2 所示。

图2 环形阵列Fig.2 Circular array
2.3 交叉扫描裂纹监测过程
为了刻画能量衰减的强弱,采用损伤差异性系数(signal difference coefficient,简称SDC)值来表示损伤信号和健康信号的统计特性差异[22],即
其中:i为激励器编号;j为传感器编号;xij(t),yij(t)分别为无损响应信号和有损响应信号;t0为每条监测路径中激励信号的直达时间;μx,μy分别为无损信号和损伤信号的平均值;ΔT为时间窗[15]。
从有限元仿真可知,激励信号接近于垂直角度射入裂纹时会形成最大的反射场,从而受损信号与参考信号之间差异变大,SDC 值相应变大;激励信号接近平行于裂纹时很少有信号反射,受损信号与参考信号之间的差异较小,则SDC 值较小。因此,在损伤路径中,互为垂直的路径上的SDC 差值最大,寻找裂纹方向的问题就转化为找出互为交叉路径组合中具有最大SDC 差值的组合。对于任意角度的裂纹,上述过程可以描述为十字交叉扫描过程。
十字交叉扫描法如图3 所示,1#~16#号压电陶瓷传感器(PZT)依次充当激励端进行数据采集,并计算每条路径的SDC 值。根据SDC 值可判定监测路径是否经过裂纹,当SDC 值变化超过一定的阈值(阈值是由于干扰引起的信号变化扰动导致SDC 值不为0)即可判定为损伤路径。在通过损伤的路径中,找出所有相互垂直十字交叉路径组合,并求出这些组合的SDC 差值的绝对值,完成对裂纹损伤的交叉扫描。

图3 十字交叉扫描法示意图Fig.3 Schematic diagram of cross scanning method
任意角度裂纹监测过程分解步骤如下:
1) 根据待监测板结构的大小,在板结构表面按照环形阵列布置PZT 传感器;
2) 以环形阵列中1 个PZT 作为激励端Ai,其余PZT 作为接收端Sj(j≠i),并采集数据;
3) 依次以传感阵列中每一个PZT 作为激励端,重复步骤2,采集数据并计算所有激励-传感路径的SDC 值;
4) 通过阈值确定疑似损伤路径,使用十字交叉扫描法扫描重构图象中的受损区域,算出可疑路径中所有交叉路径的SDC 值,计算出差值后取绝对值,对比所有路径的绝对值,最大的一组路径中,SDC 值较小的路径近似为裂纹方向。
2.4 裂纹成像
在计算出所有监测路径的SDC 值后,对临近区域内损伤概率分布图进行重构,根据概率损伤分布的原理建立椭圆权重模型,如图4 所示。根据椭圆内任意一点到激励器与传感器之间距离的大小进行权重赋值,激励器与传感器是权值最大的区域,椭圆边缘权值为0,颜色由深变浅表明损伤分布概率的衰减[23]。
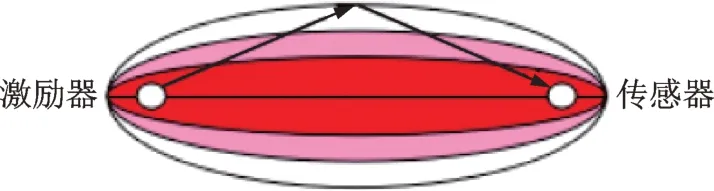
图4 椭圆权重模型Fig.4 Ellipse weight model
监测路径SDC 值的大小在一定程度上也反映出该路径的损伤程度。若信号完全无相关,SDC 值为1,即该监测路径损伤严重;若信号完全相关,即SDC 值为0,则该监测路径无损伤。由于平行于裂纹的路径SDC 值较小,所以将其SDC 值校正为1,经校正后SDC 计算式为
由式(4)可知,信号差异系数的取值范围是[0,1]。根据每条路径所求权值分布并进行叠加,结构中任意一点(x,y)出现损伤缺陷的权重为
其中:N为压电阵列中损伤路径的总数;sij(x,y)为空间分布函数。
其中:β用于控制椭圆的离心率,其值大于1,实验中取1.05[24];Rij(x,y)为结构中的点(x,y)到激励器(xik,yik)和传感器(xjk,yjk)距离之和与激励器到传感器之间距离的比值。
3 实验验证
3.1 实验设备
实验对象采用600 mm×600 mm×3 mm 的金属铝板(弹性模量为71 GPa,密度为2 711 kg/m3)。环形阵列以几何中心为圆心,设定半径为210 mm来进行布置,16 个PZT(1#~16#)均匀排布,角度间隔为0.39 rad。裂纹长度小于监测信号半波长时,Lamb 波无法形成有效反射,因此实验中主要对半波长以上的裂纹进行实验验证。此外,实际裂纹生成较为困难,而附加质量块通过改变被测结构局部阻尼特性所引起的信号改变与裂纹损伤类似[25],因此选择50 mm×3 mm 规格的金属块来模拟裂纹对结构的影响。为消除多模态带来的信号分析难度,通过实验测定,采用汉宁窗函数调制5 周期中心频率为200 kHz 的窄带激励信号[10],以激发单一模态的Lamb 波信号。实验设备如图5 所示,包括功率放大器和电荷放大器,分别用于激励信号放大和传感信号调理放大,采用NI USB-6366 数据采集卡收发信号。
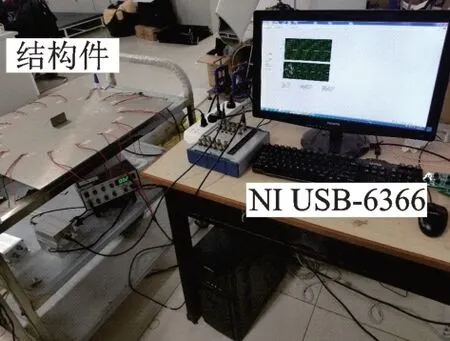
图5 实验设备Fig.5 Experimental equipment
3.2 实验数据分析
实验验证分为两部分:①监测信号相对裂纹不同角度入射时,裂纹对信号的影响;②通过3 组不同规格及方向的模拟损伤实验,验证十字交叉扫描法的成像与损伤评估效果。
1) 位于监测路径上的一条60 mm×3 mm 的模拟裂纹如图6 所示,激励信号从垂直、倾斜以及平行于裂纹的3 个方向穿过,得到3 组典型传感路径的结构响应信号。

图6 60 mm 裂纹损伤Fig.6 60 mm crack damage
3 组路径SDC 值如图7 所示,其典型结构响应信号如图8 所示。SDC 值最大时的路径表示为A1S9(A 表示激励器,S 表示传感器,下标数字为压电片编号,即1#和9#压电片),损伤信号振幅减少较大且相位延迟。SDC 值最小的路径是A5S13,损伤信号振幅减少较小,这也验证了上述仿真的结论。
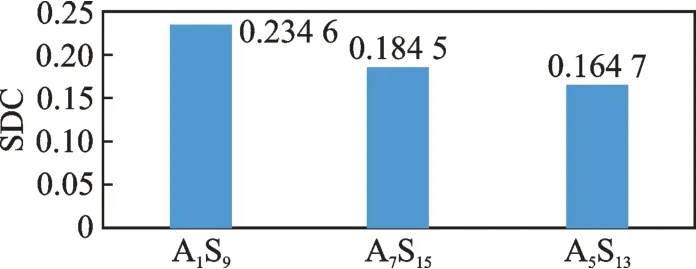
图7 3 组 路径SDC 值Fig.7 The SDC values of the three sets path

图8 3 组典型结构响应信号Fig.8 Typical structural response signals of the three groups
2) 按照裂纹方向和长度 的不同情况,设计了3组实验的裂纹规格,如表1 所示。

表1 3 组实验裂纹规格Tab.1 Three sets of experimental crack specifications
实验1 的裂纹方向与监测裂纹路径部分相交,实验2 的裂纹方向与监测裂纹路径重合,实验3 的裂纹方向与监测裂纹路径不相交。3 组实验损伤位置如图9 所示。

图9 3 组实验损伤位置Fig.9 The experimental damage location of the three groups
每组实验采集120 组信号。利用传统RAPID层析成像方法对板中裂纹损伤进行成像,实验 1 传统RAPID 成像如图10 所示,传统方法只能对损伤进行大概的定位,无法准确监测出裂纹方向。通过十字交叉扫描法对疑似损伤路径进行扫描,实验1中交叉路径差的绝对值如图11 所示,其中路径A4S11和A8S15的SDC 值分别为0.142 6 和0.285 3,这两条交叉路径SDC 差值的绝对值最大,且明显大于其他交叉路径。根据十字交叉扫描法可知,路径A4S11即为裂纹的方向。校正平行或近似平行入射裂纹的监测路径的SDC 值后,实验 1 十字交叉算法成像如图12 所示。
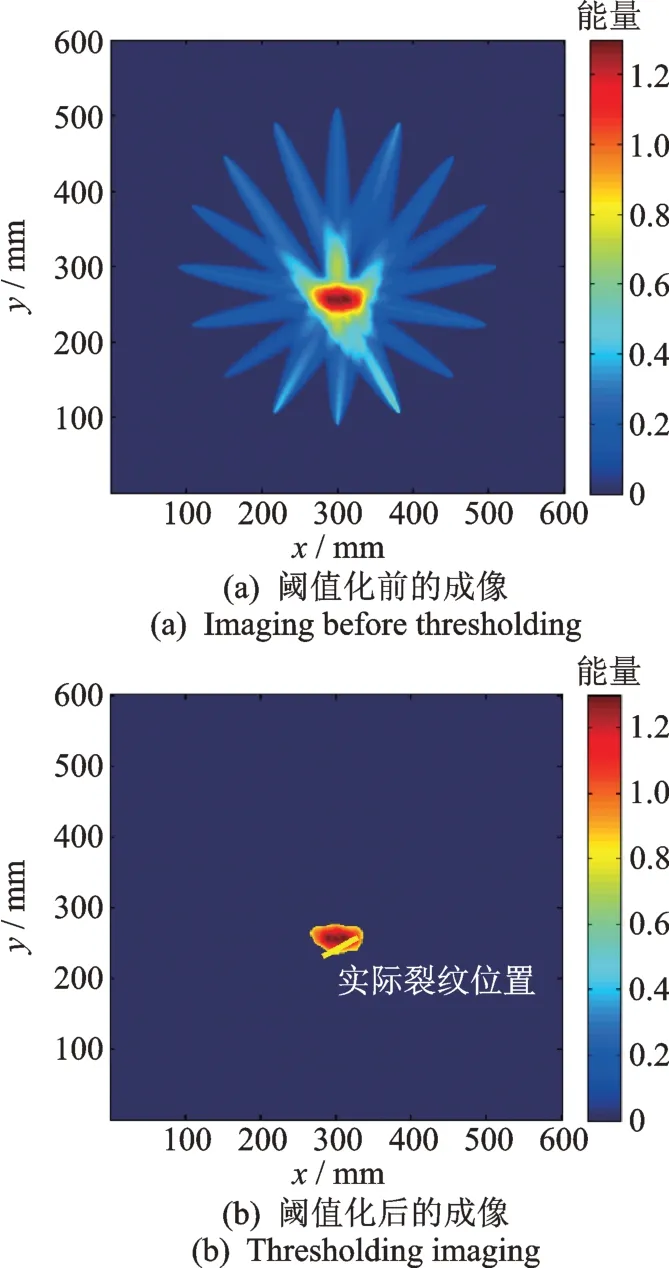
图10 实验 1 传统RAPID 成像Fig.10 The traditional RAPID imaging of experiment 1
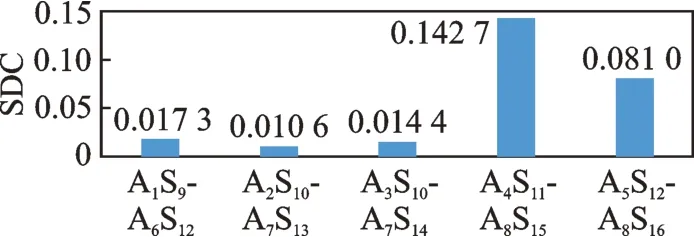
图11 实验1 交叉路径差的绝对值Fig.11 The absolute value of the difference orthogonal path of experiment 1

图12 实验 1 十字交叉算法成像Fig.12 Cross orthogonal algorithm imaging of experiment 1
实验2 利用传统RAPID 层析成像方法对板中裂纹损伤进行成像,结果如图13 所示。阈值化后的传统RAPID 成像见13(a);通过十字交叉扫描法对疑似损伤路径进行扫描,校正平行或近似平行入射裂纹的监测路径的SDC 值后,成像结果见图13(b)。实验2 交叉路径差的绝对值如图14 所示,其中交叉路 径A6S14和A12S16的SDC 值 分 别 为0.280 8 和0.177 4。根据十字交叉扫描法可知,路径A12S16为裂纹方向。

图13 实验2 成像结果Fig.13 The imaging result of experiment 2
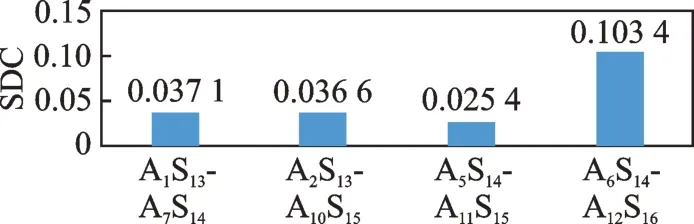
图14 实验2 交叉路径差的绝对值Fig.14 The absolute value of the difference orthogonal path of experiment 2
实验3 利用传统RAPID 层析成像方法对板中裂纹损伤进行成像,结果如图15 所示。阈值化后的传统RAPID 成像见图15(a);通过十字交叉扫描法对疑似损伤路径进行扫描,校正平行或近似平行入射裂纹的监测路径的SDC 值后,成像结果见图15(b)。实验3 交叉路径差的绝对值如图16 所示(仅列出部分交叉路径差的绝对值),其中路径A3S12和A7S16的SDC 值分别为0.331 8 和0.175 4,可知路径A7S16即为裂纹的方向。
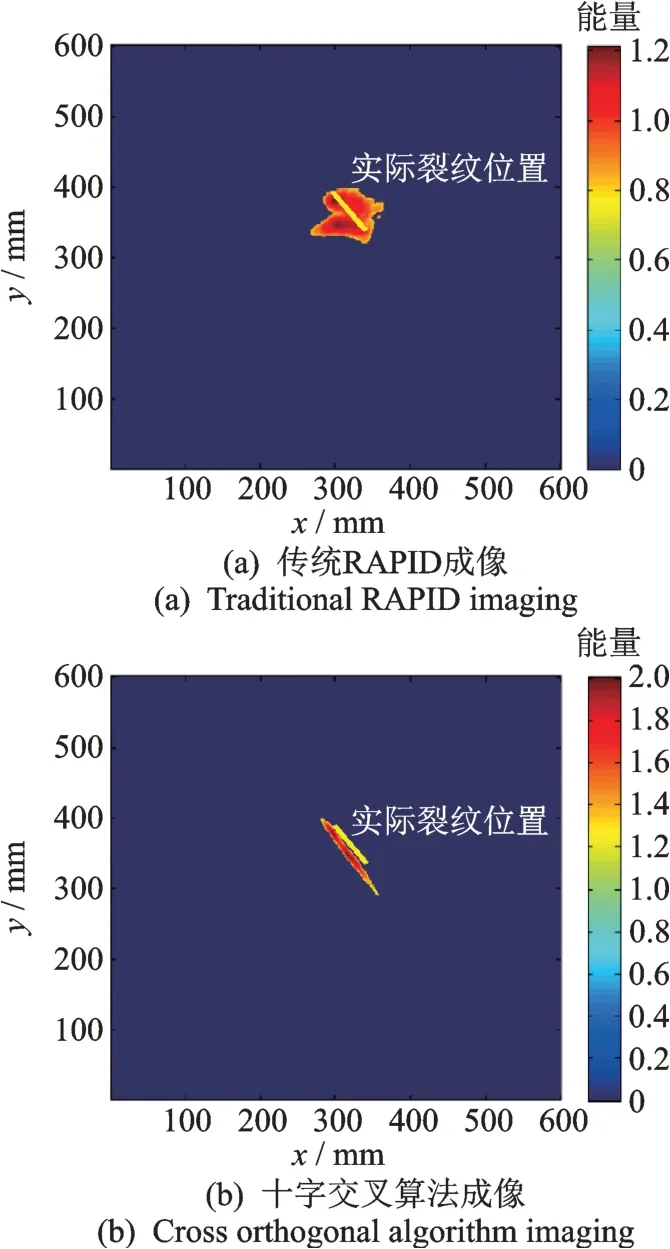
图15 实验 3 成像结果Fig.15 The imaging result of experiment 3
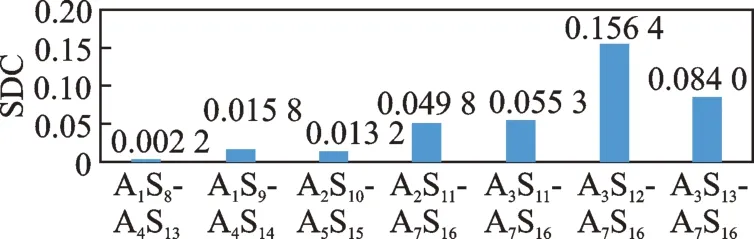
图16 实验3 交叉路径差的绝对值Fig.16 The absolute value of the difference orthogonal path of experiment 3
实验表明,改进后重构裂纹位置与实际裂纹位置非常吻合。其中,误差较大的为实验3,经过重构后裂纹与水平正方向之间形成的角度为126º,实际裂纹与水平正方向之间形成的角度为133º,重构误差为-7º。误差产生的原因是受到传感阵列中传感器间隔的影响,从而将权重分配到传感路径上。通过分析激励监测信号从不同角度经过裂纹时的影响,可以判断出裂纹方向。
4 结束语
研究了基于Lamb 波的任意角度裂纹的定量化成像监测评估方法,通过引入十字交叉扫描法对裂纹方向进行判别,并以此为基础,改进传统的RAPID 算法进行裂纹损伤重构成像。在铝板上进行了实验验证,结果表明:所提出的交叉扫描方法可以有效地实现任意方向上的裂纹方向判定;在定量监测方面,与传统RAPID 算法对比,改进后的成像与实际损伤有较好的一致性,可用于单裂纹损伤的监测。