无人机地面控制站通用化研究
2024-01-04何文志
何文志
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引 言
地面控制站是无人机[1-4]系统控制的核心,可以完成对无人机的视距和超视距控制,在无人机系统从无人机任务起始的准备阶段,关键的无人机任务执行阶段,直到最后无人机系统的信息处理与分发阶段的各个阶段都承担着重要工作。它的使命是监视飞机的飞行状态和机载有效载荷的工作状态,使地面操作人员能够有效地对飞机和有效载荷实施控制[5-12]。它的主要功能包括任务规划、飞行监视与控制、图像显示与有效载荷管理、系统监控、情报分发和数据记录等。
现有的无人机地面控制站绝大多数随无人机平台研制,各型号之间不能通用,相当程度上影响了系统的发展、推广,同时也增加了无人机装备、培训、使用和维护费用[5-6]。文献[5]分析了国内飞行器的地面控制系统体系架构,对照国外飞行器地面控制系统通用化发展趋势,设计了适合国内多种飞行器平台的通用地面控制系统体系架构。文献[6]阐述了无人机地面站软件系统通用化,并设计了地面站软件系统。文献[7]通过构建决策要素数据库,优化了无人机通用地面控制站控制决策系统的逻辑结构,建立了无人机通用地面控制站人机协同动态决策模型。文献[8]进行了无人机地面站的通用化设计和各个分系统模块的具体设计,设计实现了一套具有一定通用性,同时具有其他地面站所具有的基本功能的无人机地面站软件系统。文献[9]描述了通用地面控制站的各功能模块和逻辑结构,着重介绍了战术控制组件功能模块和逻辑结构。文献[10]设计了基于通用测控协议的协议转换软件、基于“触摸屏+硬按键+可配置软件”的通用控制台、基于组合化控制机柜的操控席位和基于TCP/IP 协议的全网络化信息传输环境,给出了系统的软、硬件组成和信息流程。文献[13-15]主要是开展地面控制站通用控制软件研究。
相关文献主要是解决软件或硬件平台如何具体实现通用化,本文面向无人机地面控制站未来发展趋势,结合我国地面控制站建设最新成果,分析了当前通用化面临的主要问题和原因,提出了地面控制站通用化的关键技术问题及解决方案。
1 国内外现状及差距分析
1.1 国外发展现状
国外无人机地面站以美军发展的各型装备为典型代表,美军基于全球作战思想,为提升无人机系统的控制效能和生存能力,构建了固定式、机动式相结合,型谱完善的无人机地面站装备体系,推行了远程分离部署的无人机运用模式,依托卫星通信资源实现了无人机全球远程测控。
美军典型固定式地面站系统包括“全球鹰”无人机作战中心(GHOC),位于爱德华兹空军基地,担负“全球鹰”无人机的地面测试、飞行任务操作和模拟训练等任务,主要用于完成无人机的指挥控制、飞行监控、空中交通管制、任务规划及载荷处理等工作,整个作战中心共由飞行操作室、载荷操作室和支持设备室三部分组成,如图1 所示。
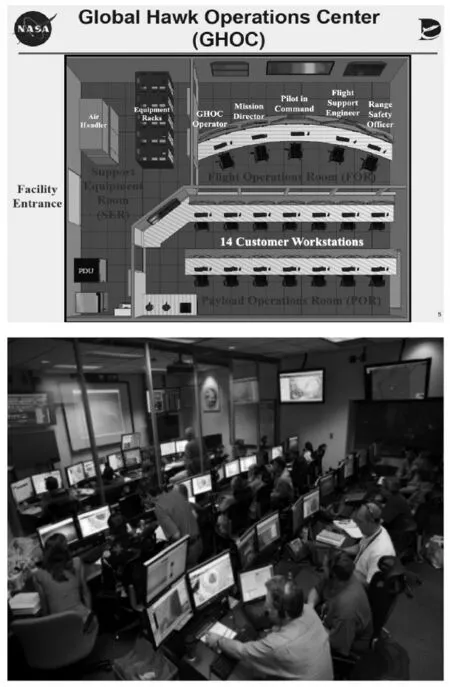
图1 “全球鹰”无人机作战中心
“全球鹰”无人机机动式地面站主要包括发射回收单元(LRE)和任务控制单元(MCE),为方舱或拖车形式[16],如图2、图3 所示。
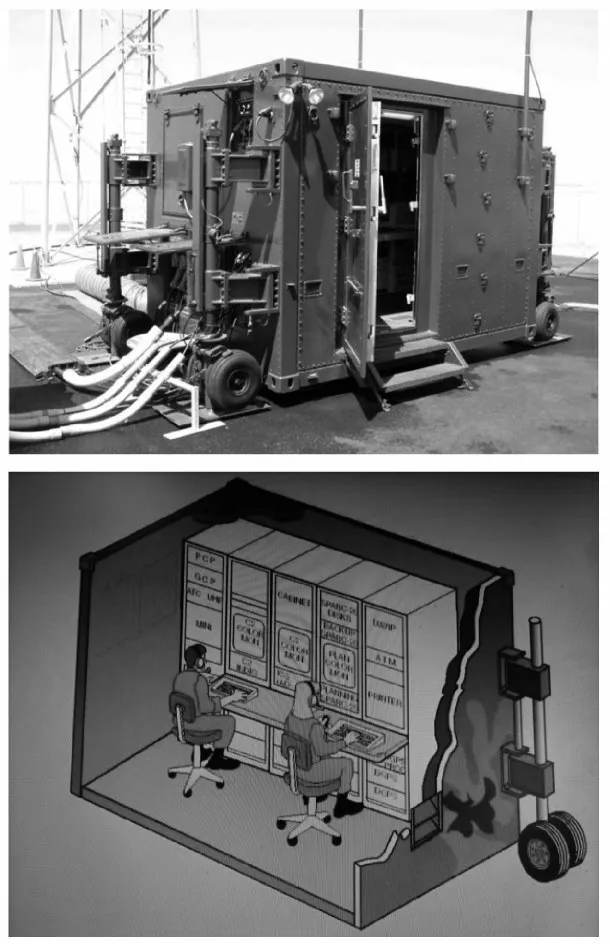
图3 “全球鹰”无人机发射回收单元
为实现无人机系统资源解耦、高效信息共享以及多国、多军种联合作战,北约、美国先后发布了STANAG 北约无人机互操作系列消息标准[17]、JAUS 无人系统联合架构系列消息标准,对无人机消息分类、消息格式、消息元素等进行了详尽的定义,覆盖了无人机系统互操作应用的所有关键环节,且两套标准体系之间正在逐步实现融合,形成一套完备、协调的消息标准体系,打破了无人机互操作性限制,大幅提升了无人机系统信息共享能力。
1.2 国内发展现状
对于界面显示,采用模块化窗口的设计方法。这里可以将航迹显示、图像显示、仪表三姿显示、任务平台俯仰、方位仪表显示等设计成为通用模块;同时对于其他遥测参数的结果,通过分析各型号无人机地面控制站软件操作界面,找出界面的共同点和特殊点,针对共同点进行通用设计,针对特殊点地面控制站软件可进行灵活配置,通过界面在线配置和界面配置库实现通用。
界面显示窗口的大小、位置都可以进行调整,并且窗口中显示的内容也都根据不同飞机定制的内容自动变化,而且每一个窗口元素都可以通过选择显示任意的参数,通过这种模块化窗口的设计,可以适应不同类型无人机的需求。我国无人机研究与应用自20 世纪60 年代起步,至今已有60 多年的历史,初步形成了包括远程、中程、近程、超近程无人机、无人直升机和特种飞机的装备体系,得到了广泛的应用。目前国内的地面控制站主要为机动车载形式,按照用途可以分为:任务控制站、起降控制站、单收站。
任务控制站一般采用单独装车方式,与视距数据链和卫通数据链连接,车内一般配置6 个席位,可以同时完成对2 架无人机的控制;起降控制站指挥控制设备与数据链路设备共同装车,配置3 个席位,同时只能通过视距链路控制一架无人机;单收站一般采用加固笔记本实现对无人机图像和数据的显示。对于各种规模的指挥控制站,软件功能都设计为独立的模块,在各种规模的指挥控制站上,根据用户的作战使用需求配置相应的模块。它的主要功能包括任务规划、飞行监视与控制、图像显示与有效载荷管理、系统监控、情报分发和数据记录等。
国内主流的控制方式都是一个地面控制站控制一架无人机,一站控制多架同型号无人机甚至控制几十架微型蜂群无人机也有相关试验。据国内媒体公开报道,国产彩虹无人机地面控制站实现了同时控制彩虹4、彩虹5 两型无人机,实现了一个控制站同时控制2 架异型大型无人机执行任务,该试验提升了我国无人机地面控制站通用化能力。国内地面控制站最新研制成果如图4 所示。
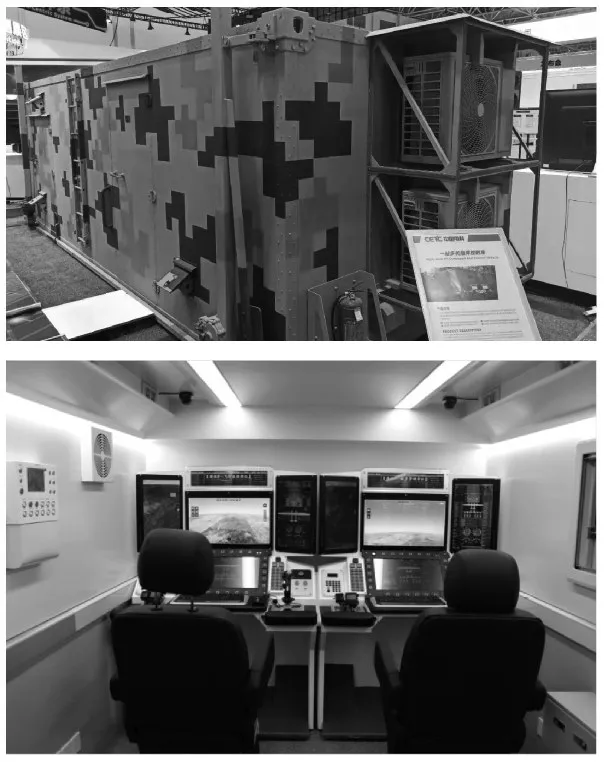
图4 国内地面控制站最新研制成果
1.3 差距分析
STANAG 4586 标准自颁布以来,在以美国为首的北约国家广泛使用,尤其用于能操作和管理多架无人机的通用地面控制站的设计。符合STANAG 4586 的通用地面控制站可以实现多架无人机之间的互操作,操作员利用它可同时操纵多架来自不同军种、不同种类、性能指标和特性各异的无人机,这就意味着相同数量的操作员可控制数量更多的无人机,使飞行的无人机数量更多,从而可降低成本,加快操作员的培训速度,减少操作人员数量,大大降低因人机接口不标准或驾驶员失误造成的事故率。
我国无人机系统的组成、任务载荷、系统功能、组织运用模式和使用流程都不尽相同。不同无人机型号间的消息格式、数据元素、封装方式、交换协议、压缩算法等差别较大,系统间信息共享效率低。不同类型的无人机数据链传输波形有差异,相同频段波形因调制方式、传输帧结构等细节参数不同,相互间不能互联互通。
我国各无人机型号消息格式的定义工作仍然由无人机平台和载荷厂家主导,不同无人机型号间的消息格式及元素的定义差别较大。目前国内在推进无人机系统通用性和互联性方面,围绕无人机数据链的消息格式开展了相关标准的研究,并发布了相关国家军用标准,但尚未形成完善的标准体系。虽然各型号无人机地面控制站的功能要求基本一致,但是各型号地面控制站都有专用的系统体系架构、软件体系架构、专用硬件、软件及协议,各型号之间不能通用。
因此,地面控制站通用化的关键技术问题主要是标准规范及消息格式的制定、系统体系架构设计、软件体系架构设计,解决了这些关键的技术问题,通用地面控制站才具备研制的基础。
2 关键技术及解决方案
2.1 构建通用地面控制站型谱
根据各型无人机对地面控制站的不同需求,构建通用地面控制站型谱,如表1 所示,提出对每型通用地面控制站的功能、性能、指标、接口、通用化范围等要求。地面控制站的型谱可以按照其配套形式并结合无人机平台任务半径进行划分,分为便携站、车载站和固定站形式,其中车载站又可细分为综合小型车载站、综合标准车载站、独立标准车载站。
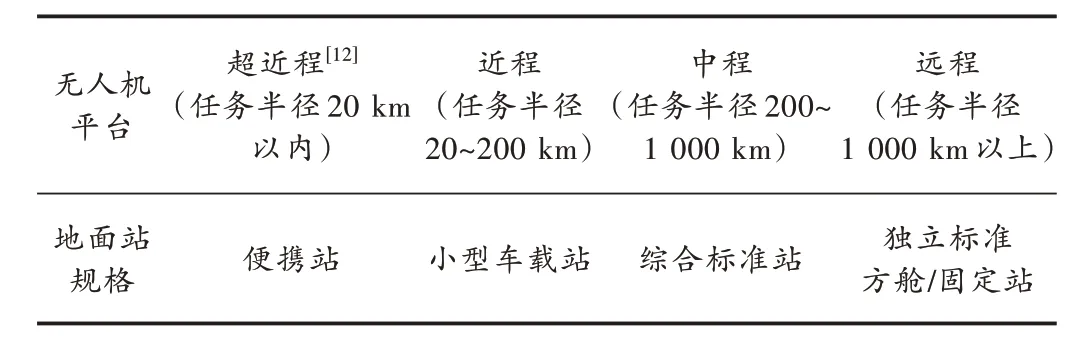
表1 地面控制站型谱产品
便携站将地面链路设备和地面控制站功能进行合并,设计成便携形式,满足单兵背负需要。标准配置为便携处理机(笔记本/平板电脑/控制盒等)和便携链路设备,主要用于超近程无人机的控制,可作为单收站使用。
小型车载站一般采用小型车载形式(依维柯/猎豹等车型),数据链设备与指挥控制设备共同装车,具有机动灵活的特点。标准配置为飞行控制席、载荷控制席、规划监控席和链路终端机柜,每个席位都是单屏。主要用于近程无人机的控制、中远程无人机的近距离控制以及情报单收。
综合标准车载站一般采用车载方舱形式,数据链设备与指挥控制设备共同装车,机动性较强,只能同时控制单架无人机。标准配置为飞行控制席、载荷控制席、规划监控席和链路终端机柜,每个席位都是双屏。主要用于中程无人机的控制,可作为起降控制站使用。
独立标准车载站采用车载方舱形式,数据链设备与指挥控制设备单独装车,可以同时控制2 架无人机。可以外接单独的卫通链路车和情报处理车,主要用于中远程无人机的控制,可作为任务控制站使用。
固定站一般装备在指挥所大厅,一般采用商用货架设备,通过通信卫星对无人机进行超远程监控,固定站对席位一般没有限制,可通过增加席位完成对多架无人机的同时监控。固定站具有“远程控制”的特点,一般完成航路和任务阶段的无人机控制,用于完成大规模无人机的集中控制。
2.2 建立通用化标准体系
在以往通用化成果的基础上,研究国内和国外地面控制站通用化成果,整理仿真和验证结果,梳理和制定各项标准,建立标准体系,指导后续型号研制工作。主要包括以下标准:
1)通用化设计要求
规定无人机地面控制站的功能、性能、设计、可靠性和保障性等通用要求。
2)硬件设备设计要求
规定无人机指挥控制硬件设备相关的硬件设备功能、布局、要求、连接关系、选型。
3)外部接口设计要求
规定无人机地面指挥控制系统硬件接口种类划分、设计要求、性能要求。
4)外部接口协议要求
规定无人机地面指挥控制系统对外接口协议种类划分、接口标准。
5)遥控遥测消息格式要求
专门规定无人机地面控制站与飞机之间遥控遥测数据的消息格式、遥控指令、遥测参数、处理方法的标准。
6)软件接口规范
规定无人机地面指挥控制内部各个软件模块之间的接口内容、信息流程、接口协议,其中包括通用控制核心模块和VSM 之间的接口。
7)软件界面设计规范
规定无人机地面控制站软件界面要求。
8)无人机地面控制站软件功能要求
规定无人机地面控制站软件功能要求、性能要求。
2.3 系统体系架构设计
目前国内现役无人机控制系统基本上都是基于专用的硬件平台和软件模块,无法满足系统对不同类型无人机进行通用处理及互操作的需求。通用地面控制站系统根据TCS 的设计思想,借鉴北约STANAG 4586 的体系架构进行通用化体系结构设计。地面控制站系统的体系结构如图5 所示。
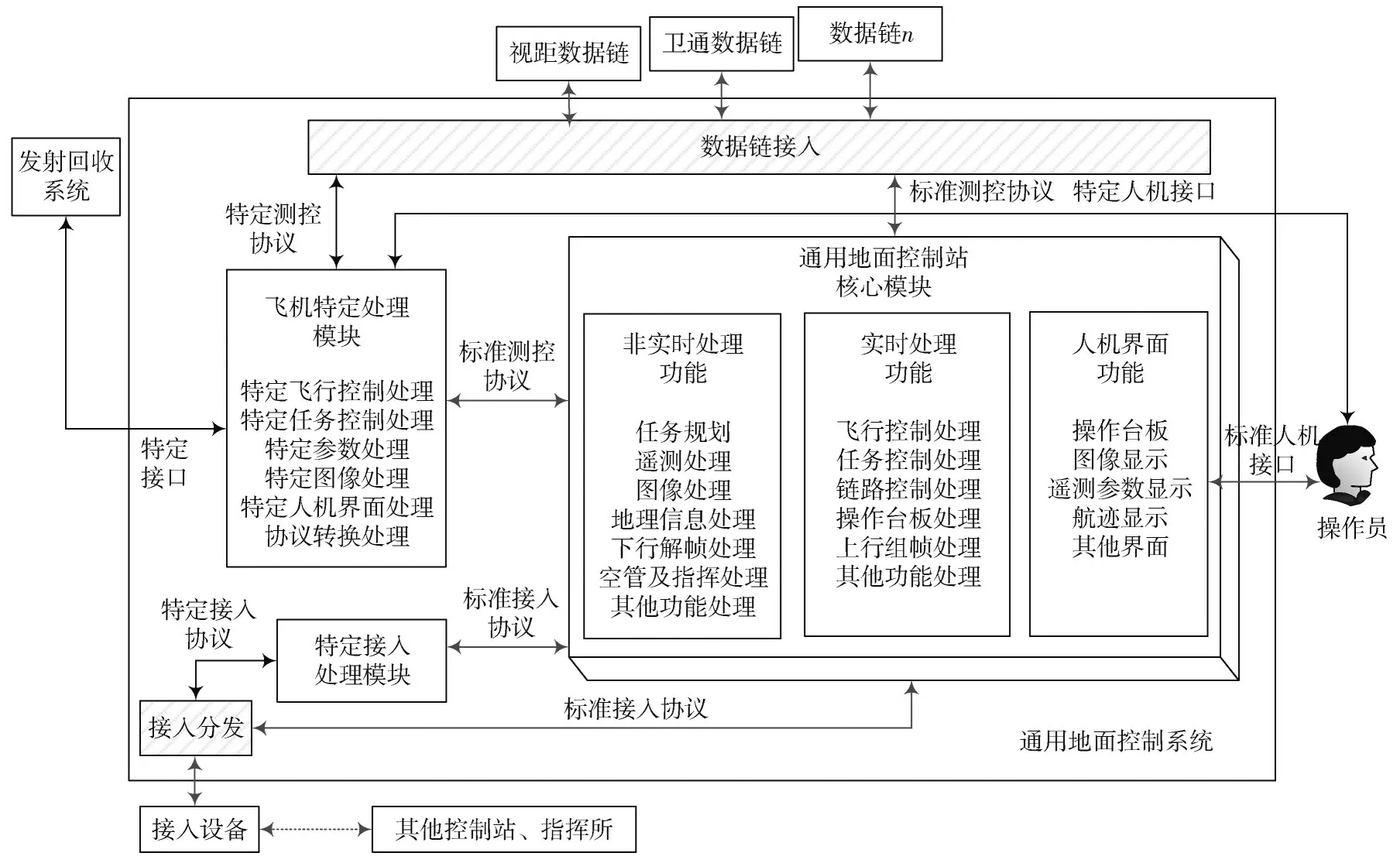
图5 地面控制站系统体系架构图
通用控制站核心模块完成支持标准协议的通用处理、控制、显示以及分发功能,核心模块支持标准测控信息协议、标准外网接入协议和人机接口的各种要求。
飞机特定处理模块完成相应飞机特殊的、专用的处理功能以及协议转换,对于未来的无人机系统,如果采用了标准测控协议,则飞机特定处理模块完成的是该飞机特殊的、专用的处理;对于以往的无人机,如果没有采用标准测控协议,则飞机特定处理模块除了完成该飞机特殊的、专用的处理以外,还要完成从标准测控协议到该飞机测控协议之间的协议转换工作。
接入特定处理模块完成特殊对外接口协议与指挥信息系统标准协议之间的协议转换功能,使无人机控制站与特定的C4I系统兼容。
测控信息接口规定了无人机系统中通用地面控制站核心模块和飞机之间的标准通信协议,通信协议主要包括数据帧格式、数据格式。
外网接入接口规定了指挥信息系统和通用地面控制站核心模块之间的接口,外网接入接口直接采用符合指挥信息系统的通信标准和协议,实现与指挥信息系统连接的其他控制站或者指挥系统的指挥、态势等信息的互联。
2.4 软件体系架构设计
地面控制站软件是一个复杂的软件系统,具有功能类别多、管理设备多、接口种类多、运行模式多等特点。地面控制站软件设计为一个开放式系统,它提供必要的接口、开发环境、开发工具、检测工具,易于集成第三方技术,充分借用各厂家的技术力量,鼓励第三方引入各自的VSM 等专用模块,以最少的修改实现对不同无人机的支持,从而支持实现整个系统的通用化。
地面控制站软件采用开放式体系架构,基于模块化分层设计思想,划分为系统平台层、接口层、数据层、业务层。
软件体系架构如图6 所示。
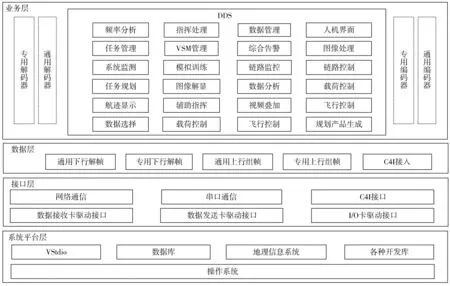
图6 软件体系架构图
各层软件介绍如下:
1)系统平台层,主要包括操作系统类软件和开发、运行环境,系统平台层是地面控制站软件的开发、运行、管理平台,它负责管理系统的硬件设备和各种软件平台,并向上层提供基础服务和调用接口。
2)接口层,主要包括数据层需要调用的各种通信接口和专用设备的驱动接口,通过调用系统平台层提供的基础服务和系统调用为数据层的对外数据接入提供支撑。这一层软件通常与通信质量密切相关,而与数据内容和通信协议无关。
3)数据层,主要完成下行数据的解帧和上行数据的组帧以及C4I 接入工作。数据层从下层(接口层)获取下行数据后进行基本的处理和解帧,向上层(业务层)提供数据引擎;数据层从上层(业务层)获取上行数据后进行组帧或协议转换,通过下层(接口层)发送到数据链设备。
4)业务层,主要实现地面控制站的各种业务,包括遥控、遥测、链路监控、任务规划等,是地面控制站实现通用化的关键部分。应用层软件分为多个通用模块和专用模块,各模块设计为网络浮动形式,它们之间通过DDS 交换数据。通过增加、更换或配置软件模块实现功能扩充或变更,构造出一个分布式、可配置、可扩展的业务层。通用模块处理在各型无人机之间能够统一标准的功能或数据,专用模块完成各型飞机特有的功能或数据处理。通用模块通过和不同机型的专用模块配合,实现对多型无人机的控制。
3 结 语
无人机控制站技术正在向通用化、智能化、网络化、多功能及小型化等方向发展,国外先进的无人机地面控制站已基本实现通用,智能化自主任务控制、综合系统健康管理、面向操作员的多无人机协同等先进技术也在研究中。
本文提出的通用化解决方案后续还需完善标准体系,分步骤在今后新研制的型号上进行具体实施,最终实现系列化的通用地面控制站。
