同步器试验台机械转动惯量电模拟复合控制*
2024-01-03王皖君李赵春
王皖君,李赵春,华 晋
(1.南京信息职业技术学院智能制造学院,南京 210023;2.南京林业大学机械电子工程学院,南京 210037)
0 引言
同步器的性能与变速器技术指标直接相关,研究机构广泛采用同步器试验台进行性能试验[1-5],对于同步器试验,转速稳定性对试验有效性至关重要[5]。同步摩擦扭矩对于电机转速控制系统是一个突加的强扰动,转速控制性能通常不能满足试验要求。为提高转速稳定性,试验台通常采用机械飞轮增加转动惯量,但这种方案存在一定的安全隐患[6]。
电模拟通过控制电机转速或扭矩模拟机械飞轮的储能特性,已成为机电传动领域的研究热点之一[7-11]。李卫东等[12]研究了航空刹车动力试验台电惯量模拟控制方法,根据动态过程中应补偿的能量来确定电机的输出扭矩。王占礼等[13]采用转速控制法补偿飞轮动能,调节系统转动惯量,但在获得良好的转速动态响应时会发生超调,进一步提出基于模糊PID控制器的方案。李文礼等[14-15]采用PI控制器实现动力总成试验台架动态模拟,同样出现了超调和振荡现象。在系统参数变化和受到较大扰动时,已研究方法的控制性能不能满足试验要求。
滑模控制器对系统的不确定性和扰动具有不变性,在控制工程中得到了广泛的应用和研究,其中终端滑模控制器由于能在有限时间内收敛而得到了学者的重视[16-18]。在同步器试验时,若能根据同步摩擦扭矩进行前馈补偿,可进一步提高转速稳定性。针对同步器试验过程中传统PI控制器响应慢、被动消除转速跟踪误差的特点,本文建立驱动电机动力学模型时考虑扭矩跟踪误差以及系统参数变化,研究应用扰动观测器估计驱动电机受到的集总扰动;采用连续终端滑模控制技术设计转速控制器,并根据转动惯量电模拟原理将估计的扰动量集成到转速控制器形成复合控制,模拟转动惯量抑制转速波动,避免通过高控制增益抑制强干扰,弱化滑模控制的抖振问题。最后对分别采用本文方法、PI控制器和机械飞轮模拟时的同步器试验台进行动态仿真实验,结果表明该方法不仅可以提供更为快速的转速跟踪性能,还能代替机械飞轮稳定转速。
1 同步器试验台原理
采用转动惯量电模拟的同步器试验台结构示意图如图1所示,图中驱动电机、变速器输出轴通过联轴器和传动轴机械联接,驱动电机拖动整个旋转轴模拟实际汽车行驶工况,自动换挡机构根据试验需求代替人工换挡操作。为了准确模拟同步器的实际工况,还在变速器输入轴安装所匹配的离合器从动盘总成[5]。
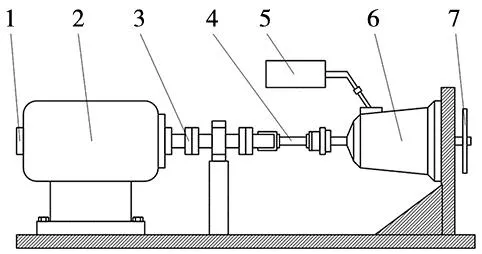
1.光电编码器 2.驱动电机 3.联轴器 4.传动轴 5.自动换挡机构 6.变速箱 7.离合器从动盘图1 同步器试验台结构
在同步器试验过程中,变速器输出轴都是处于旋转运动状态,可以忽略轴系在低速时的非线性摩擦特性,则驱动电机的动态方程为:

(1)

然而,在同步器试验过程中,折算到驱动电机轴上的总转动惯量J会因为变速器速比的变化而在一定范围内摄动。此外,在同步过程中,输入轴齿轮转速变化时还需克服变速箱内润滑油的阻力,因此轴系的粘滞摩擦系数B同样会在一定范围内摄动。由于电机驱动控制系统存在响应时间,还需考虑驱动电机实际电磁扭矩在跟踪扭矩控制给定量时存在误差。因此,驱动电机的动态方程可进一步修正为:
(2)

针对同步器试验对转速稳定性的要求,本文设计基于扰动观测技术和连续终端滑模的机械转动惯量电模拟复合控制方法,给出驱动电机扭矩控制量,在现有电机驱动控制技术基础上,实现取消传统试验台中的机械飞轮,使得在同步摩擦扭矩扰动和系统参数摄动情况下驱动电机转速能够快速、稳定跟踪目标转速。
2 转动惯量电模拟复合控制设计
根据转动惯量电模拟控制方法的前期研究结果,当外部扭矩Td分别作用于转动惯量为JM的驱动电机和转动惯量为JF的机械飞轮,如果驱动电机产生方向与外部扭矩Td相反的惯量模拟扭矩TI,且TI满足式(3),则两者的转速变化相同[6]。
(3)
在传统同步器试验台中,机械飞轮的转动惯量远大于驱动电机的转动惯量,即有JF≫JM,则式(3)可以修改为TI≈Td,结合驱动电机动态方程式(1)和式(2)可知,补偿同步摩擦扭矩为主的扰动即可实现机械转动惯量电模拟。
2.1 扰动观测器设计
分析文献[1-2]已研究的同步器同步机理可知,短时间内同步摩擦力矩随时间变化可以用多项式拟合,因而可以采用广义比例积分观测器(GPIO)估计以同步摩擦力矩为主的扰动,估计的扰动量可以视为惯量模拟扭矩,并对驱动电机扭矩进行前馈补偿。
将式(1)给出的驱动电机动态方程进行高阶扩展,定义集总扰动d(ω,t)的一、二阶导数分别为d1(ω,t)、d2(ω,t),扩展后的系统可表示为:
(4)
对于扩展系统(4),可设计广义比例积分观测器为:
(5)


将扩展后的驱动电机动力学模型(4)与广义比例积分扰动观测器(5)相减,可得:
(6)
误差方程为:
(7)
式中:σ(t)为集总扰动的三阶导数。
在换挡过程中产生的同步摩擦扭矩对于驱动电机是多项式形式的扰动,通常满足σ(t)=0,只要选择k0、k1、k2、k3使特征多项式D(s)=s4+k0s3+k1s2+k2s+k3的根全部位于在复平面的左半平面,则可以使得观测器收敛,设计时可以按远离虚轴的重极点进行合理配置[19]。
2.2 连续终端滑模转速控制器设计
定义角速度误差e为:
e=ωref-ω
(8)
式中:ωref为目标角速度,rad/s。

(9)
(10)
式中:c为增益系数,c>0;α为幂次系数,0<α<1;sgn(·)为标准符号函数。
通过设计合适的增益系数c和幂次系数α可以在滑模面上实现转速误差e以有限时间收敛到零,选择较大的增益系数c时收敛速度越快,选择较小的幂次系数α时稳态误差越小。
根据转动惯量电模拟原理和文献[20]研究的连续终端滑模控制理论,集成估计扰动量的转速控制器设计为:
(11)
式中:

式中:ueq为等效控制量,v为切换控制量,un为v经过低通滤波器处理后的输出,T为低通滤波器截止频率,kT为切换增益参数,需满足kT≥T·Ld,η为切换增益参数,η>0。
2.3 闭环系统稳定分析




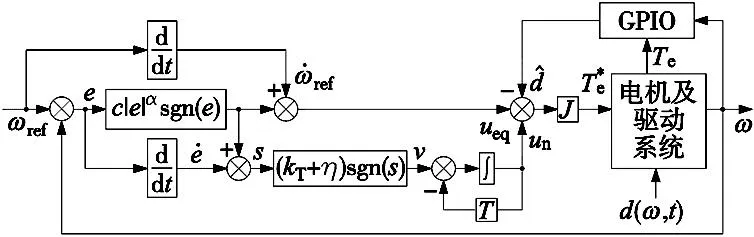
图2 控制原理图
3 仿真实验

仿真时,广义比例积分观测器的极点按远离虚轴的重极点进行配置,选择P=-20,即k0=80、k1=2400、k2=32 000、k3=160 000。考虑到实际系统中控制量饱和与传动链的柔性对系统的响应速度和抗干扰性能的约束,连续终端滑模转速控制器参数取为:α=0.5、c=3、kT=5、η=5、T=0.1;仅采用PI控制器时比例系数和积分时间分别为20、1,采用机械飞轮模拟转动惯量时PI控制器的比例系数和积分时间分别80、0.5,为保证控制性能对比的客观性和合理性,选择控制器参数时保证响应速度和超调量基本一致,并符合工程实践对转速超调量的限制。
仿真中,目标转速为1000 rpm,为了避免阶跃给定信号造成机械冲击和诱发系统谐振,实际应用中通常设置加减速时间,不仅可实现转速缓和变化,而且节约控制能量,仿真实验中将加速时间设为1 s。同步摩擦扭矩采用平滑脉冲函数作为一般表示形式,数学式为:
TL=0.25ame2[ω0(t-t0)]2e-ω0(t-t0)
(12)
式中:am为同步摩擦扭矩的幅值,N·m;ω0为平滑脉冲的带宽,取值越大,脉冲持续时间越短,1/s;t为时间变量,s;t0为同步摩擦扭矩的起始时刻,s,仿真时,am=200 N·m、ω0=10/s、t0=20 s,即在20~21 s时产生同步摩擦扭矩,并作为时变干扰加载到驱动电机轴上。
图3为3种不同方案时升速过程对比曲线。可以看出,无机械飞轮时,轴系转动惯量较小,转速迅速增加,本文提出的连续终端滑模转速控制器的跟踪性能优于PI控制器,不仅跟踪速度快,而且超调量小,这是由于扭矩控制量中包含了给定转速的变化率,而且非线性控制时误差的收敛速度优于线性控制,此外,表示电模拟惯量的控制作用不影响加速过程;而采用机械飞轮模拟惯量时,由于轴系转动惯量较大,加速过程缓慢。

图3 加速过程中转速响应对比 图4 加速过程中扭矩控制量对比
图4中是3种不同方案时,加速过程中扭矩控制量的变化情况。
采用本文方法时,控制量响应最快而且准确,而采用PI控制器时,为了保证跟踪性能,控制量大导致转速超调,采用机械飞轮增加轴系转动惯量后,加速过程中控制量已达到饱和限幅值,需要较多的控制能量。
在控制器参数相同条件下,稳态运行过程中同步摩擦扭矩作用于轴系时,电模拟、PI控制器和机械模拟方案时的转速响应过程如图5所示。

图5 同步过程中转速响应对比 图6 同步过程中实际扰动和估计扰动对比
采用本文方法时,转速波动情况得到较好抑制,转速波动范围在999~1003 rpm,转速误差迅速收敛到0;而采用PI控制器时,转速瞬时降落到945 rpm,且转速恢复时间较长,无法满足同步器试验对转速稳定性的要求。采用机械飞轮模拟时,转速波动情况有所改善,而且受扰后转速恢复时间同样较长。
图6为实际扰动和估计扰动的对比曲线(扭矩形式),实际扰动除同步摩擦扭矩外,还包括转动惯量变化和粘滞摩擦系数变化导致的内部扰动,实际扰动的峰值略高于最大同步摩擦扭矩。
从图6可以看出,估计扰动在起始阶段略滞后于实际扰动,扭矩控制量也相应滞后,当出现转速误差时,连续终端滑模转速控制器开始作用,转速进入恢复阶段;由于同步过程中转动惯量发生了变化,广义比例积分观测器模型中参数值不准确,而且考虑实际系统信号中的高频噪声,观测器的响应速度不能过度提高,估计扰动和实际扰动存在偏差,因此转速恢复过程中出现了超调现象。同步过程中,3种方案的扭矩控制量变化情况如图7所示。
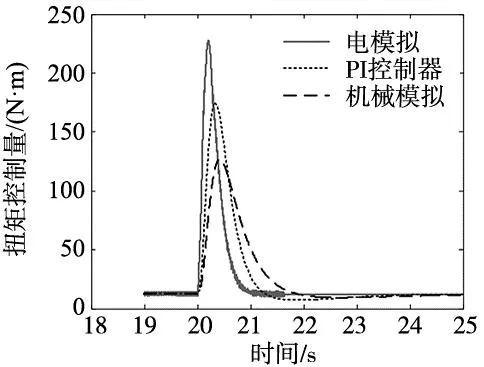
图7 同步过程中扭矩控制量对比
本文方法的响应最快、控制作用最强,由于PI控制器参数受机械系统的限制,同步摩擦扭矩作为强干扰作用时,尽管出现了较大转速误差,但扭矩控制量不能快速抵消干扰对转速的影响。采用机械飞轮增加系统转动惯量,虽然能一定程度上减小转速波动,然而,受到干扰作用后控制作用也弱,转速恢复时间也较长。
4 结论
针对同步器试验对转速稳定性的要求,以及PI控制器、机械飞轮增加转动惯量方法的缺点,根据转动惯量电模拟原理,将同步摩擦扭矩和同步过程中的参数变化视为集总扰动,本文给出了一种基于扰动观测技术和连续终端滑模的转动惯量电模拟复合控制方法,通过仿真实验结果可以得到如下结论:
(1)广义比例积分观测器能有效估计同步过程中驱动电机受到的集总扰动,只需将观测器的极点配置为远离虚轴的重极点即可便捷地确定观测器参数。
(2)融入估计扰动量的连续终端滑模转速控制器可以为同步器试验提供优越的转速跟踪性能和转速稳定性能,而且对转动惯量变化和粘滞摩擦系数变化不敏感。
(3)工程应用时,只需将电机驱动控制系统设置为扭矩闭环控制模式,并从其中读取或检测实际扭矩和实际转速,采用本文方法给出扭矩控制量,即可代替机械飞轮提高同步过程中的转速稳定性,具有较好的实用价值。