基于水下超声测距方法的海底管道屈曲变形测量技术研究
2024-01-03王克宽段瑞彬何亚章于德周王来臻
王克宽,段瑞彬,何亚章,于德周,王来臻
1.中国石油集团工程技术研究有限公司,天津 300451
2.中国石油集团海洋工程重点实验室,天津 300451
3.中国石油集团海洋工程有限公司海洋工程事业部,山东青岛 266555
海底管道是海上油气田系统的主要组成部分[1]。随着服役年限的增加或由于人为因素及自然灾害等外力影响,管道会产生不同程度的屈曲变形[2]。为防止受损海底管道进一步变形或破损而造成环境污染及经济损失,一般根据管道受损程度及状态采取适宜的维修方式,以保障管道运行安全[3]。因此,精准测量管道受损状态、获取管道屈曲变形的特征数据并据此评估管道的损伤程度,对管道维修和保障管道运行安全至关重要。
在海况条件良好的海域,海底管道屈曲变形测量通常采用潜水员观察探摸法、ROV/AUV 辅助目视摄像法以及激光、声呐等常规测绘方法[4-5],但对于高浑浊度、低能见度以及高流速等海况条件恶劣的作业海域,常规的测量方法通常难以适用或无法满足工程测量精度的要求。
本文依据水下超声测距原理,针对恶劣海况下海底管道变形测量精度、作业效率及施工安全性需求,研究海底管道屈曲变形精确测量技术,以期为复杂海域海底管道屈曲变形修复工程施工提供切实可行的技术手段。
1 海底管道屈曲变形超声法测量技术原理
1.1 水下超声测距原理
超声法测量海底管道变形的技术基础是超声测距技术,采用直达波测量原理,当发射探头发射一束超声波在水中传播到达结构物表面,除部分声波进入管道内,大部分声波将被反射回水中传播并被接受,如图1所示。

图1 水下超声测量原理
管道变形值由声波在水中传播的双程时间和水中的平均声速确定[6],测量从开始发射超声波到接收到反射波所经历的时间,则可计算探头与反射面的距离,从而计算管道变形量。
式中:H为管道变形量,m;C为声速,m/s;t为测量时间系统探测的发射和接收声波的时间差,s。
技术可行性方面,为了适应被测变形缺陷的变化,要求发射的超声波束具有尽可能小的扩散角,以保证较强的方向性,需要制作专门的水下测量用超声波探头(换能器),满足管道测量要求;为保证测量信号的同步性,需要制作专用水下同步扫查器;为适应水下应用环境,采用发射、接收双探头集成化测量,需要隔离或削弱由发射探头直接传到接收探头的直达波。超声波信号在距离被测物体较远时会有一定的信号衰减,导致信号失真,因此在远距离测量时保证超声波传输能力与聚焦特征是超声激励与接收系统所要解决的关键问题。
1.2 管道外表面三维模型的构建
测取管道的屈曲变形特征,首先需构建管道外表面三维模型,再依据模型对变形几何要素进行精确计算[7],从而得到椭圆度、弯曲度等变形特征值。因此需要建立水下测量坐标系,引入数学化描述方法,对管道外表面上的点进行数学化描述,从而构建管道外表面三维模型。如图2所示,以管道确定的横截圆为标准圆,以其圆心o为坐标原点,分别以该标准圆互相垂直的半径轴为x轴、y轴,以管道轴向方向为z轴,构建水下测量坐标系o(x,y,z)。
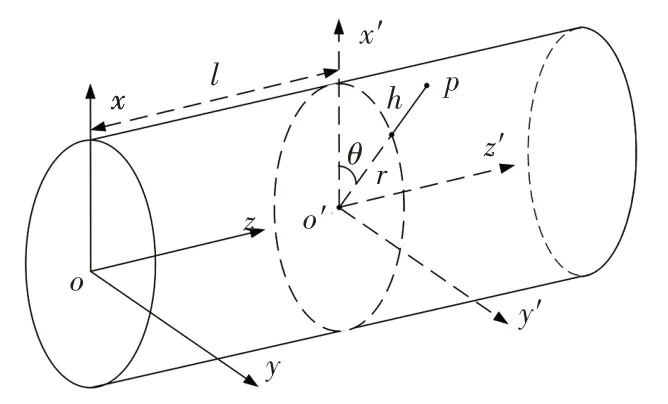
图2 水下测量坐标系
实际测量中,以标准圆的圆周为测量标准零点,通过超声传感器测得管道外表面某点P与等效标准零点o′(x′,y′,z′)的距离h,再配合其他传感器测量P点在管道轴向方向与测量原点的距离l以及P点与等效标准零点的圆心o的连线沿管道环向的逆时针偏移角度θ,通过坐标变换,即可得到P点的直角坐标系值。
式中:r为标准圆半径。
当测量点位置坐标数达到一定数量时,可通过样条插值等数学方法,构建管道外表面三维模型,测量点的数量决定模型的精确程度。由于被测管道与测量传感器位于同一坐标系内,因此测量过程中需确保传感器与被测管道之间的相对位置可控,即确保测量过程中水下坐标系的一致性,从而保证测量点位置坐标值的准确性。
2 超声测量屈曲变形精度控制
声速是超声测距公式中的关键因子,也是海底管道变形超声测量的重要参数,水中声速不受管道变形程度影响,但与水下环境温度、海水盐度、深度等传输介质条件密切相关,因此需要根据水下介质条件的变化修正超声波声速值,以保证测量结果的准确性。温度与水中声速对照数据(1 标准大气压下)如表1 所示,温度每上升1 ℃,声速增加约4 m/s;盐度每增加1‰,声速约增加1 m/s;水深每增加10 m,近似增加1个大气压的压力,声速增加约0.2 m/s[8]。因此可知声速对温度变化敏感,盐度对声速的影响较弱,深度变化165 m 相当于水温变化1 ℃。本文采用如下平均声速修正公式:

表1 不同温度变化与水中声速对照
式中:C为声速,m/s;T为温度,℃;S为盐度,‰;Z为深度,m。
3 海底管道屈曲变形超声测量系统
测量系统由测量工装、超声激励/接收系统、前置放大器、数据传输系统、终端采集器及上位机软件组成。测量工装用于搭载超声传感器进行管道缺陷扫查;超声激励/接收系统是超声信号的发射端与接收端,与前置放大器共同完成超声信号的前期处理;数据传输系统的作用是将传感器模拟信号数据传输给终端采集器,最终由上位机软件完成信号处理与分析,系统结构如图3所示。
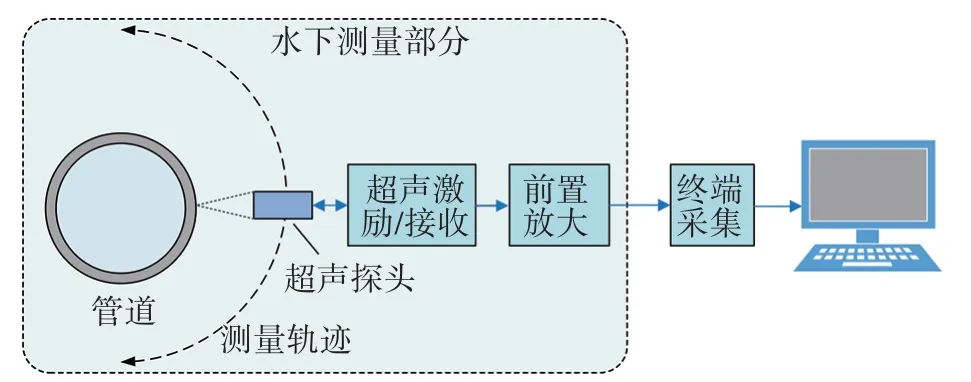
图3 测量系统结构
测量系统的测量过程为:采用换能器垂直于管道表面发射声波,当声波遇到管道时发生反射,发射回波信号返回接收端并被其接收,通过进一步数据处理,得到管道变形坐标值。
为了使激励/接收系统发挥最好的性能,研制了500 kHz 和1 MHz 的超声测量换能器,集成度高、小型化且适应于水下测量,参数指标见表2。

表2 超声换能器参数指标
控制模块(见图4)是连接测量主机和测量工装的中间环节,用于识别测量命令,通知测量主机采集超声信号,调理编码器信号,同时控制高精度旋转测量装置按既定圈数转动。整个触发及控制模块系统可以根据实际需要进行触发密度连续调节。传感器工作在海洋环境下,易受潮流、砂石等干扰,影响测量准确度,在控制模块中进行了较强的抗干扰屏蔽设计,避免因外界环境带来的误触发现象。
图4 控制模块
作为测量系统的关键部分,超声脉冲发射/接收器(见图5)具有较好的低噪接收响应和较丰富的脉冲发生器调节功能,包括发射脉冲重复频率控制、脉冲电压控制(对给定的探头,调节激励脉冲幅度)、激励探头频带范围选择(对于方波脉冲发生器,脉冲频带宽度与激励探头固有频率匹配时能得到较好的激励效果)、接收器的增益范围调节以及简单的低通和高通滤波等功能。除此之外,还包括射频信号输出、外部触发信号输入、同步脉冲信号输出,在使用过程中光电编码器的输出脉冲信号连接,用来控制激励脉冲的发射与超声波的接收等功能。外部触发信号输入接口与上位机内的超声采集卡连接,将接收探头收到的超声信号传送给上位机超声采集部分。

图5 超声脉冲发射/接收器
4 工程应用
位于杭州湾海域的某海底原油管道在全线检测中发现两处较为严重的变形缺陷,变形量分别达到22%、12%,工程采用管卡方式进行修复,该维修方式要求精准测量管道变形缺陷特征,以指导管卡的设计及安装,因此测量结果的准确性对项目施工十分重要。由于杭州湾海域海况条件差,是世界上三大凶险海况的海域之一,水下能见度为零且潮差大、流速大,常规的测量方法无法实施或测量精度无法满足工程需求。
工程中采用超声测量系统进行了管道变形特征的测量。由同步扫查器搭载超声测量系统,以扫查器作业起始点为原点建立水下坐标系。在水下坐标系中获取管道表面坐标值,进一步建立变形管道的三维模型(见图6),计算各变形特征值,得到管道的椭圆度、弯曲角度、倾斜角度等特征值,作为管卡安装施工的数据依据,保障维修管卡的顺利安装。
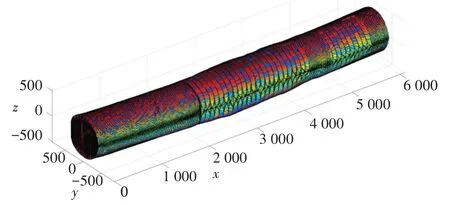
图6 管道三维模型
5 结论
1)以水下超声测距原理为基础形成的海底管道屈曲变形测量系统可克服高浑浊度、低能见度以及高流速等恶劣海况条件,实现管道变形特征的测量,并能够保证工程应用测量精度,测量数据具有明确的工程指导意义。
2)超声测量系统测量海底管道变形的精度受海底环境条件、测量数据处理方法、施工条件以及配合工装等多种因素影响,工程应用中需要根据实际情况作相应的参数修正。
3)海底管道变形特征的超声法精准测量结合结构管卡安装的维修方式是海底管道屈曲变形缺陷维修的有效手段,具有实际推广意义。