异构车载通信中基于模糊逻辑的最佳簇头选择算法*
2024-01-02程石磊
周 军,程石磊,肖 飞
(中国电子科技集团公司第三十研究所,四川 成都 610041)
0 引言
当前经济的飞速发展以及车辆工艺的不断进步,使得汽车普及的同时许多新的车载应用也随之出现,车载网络中出现了大量的资源需求[1-2]。这些应用需要复杂的计算能力和巨大的存储空间,而目前车辆的硬件系统追求小尺寸与低成本,使得每个车辆只拥有有限的计算能力和存储空间,因此单个车辆很难独自支撑这些应用的高效运行[3]。
其中一个很有效的解决方法是在物理区域相邻的车辆之间共享计算能力、存储空间和带宽资源,这就需要研究车载云概念与分簇技术在车载网络中的应用[4-5]。车载网络中车辆高速移动且网络拓扑频繁变换,通过建立数学模型确定簇头[6-8]太过复杂,且缺乏灵活性,亟须改进。
本文提出了一种车载随意移动网路(Vehicular ad-hoc Network,VANET)分簇中基于模糊逻辑来选择簇头的方案,以相对平均速度、相邻度和路边单元的链路质量为度量标准,基于模糊逻辑方法选取最理想的簇头,从而更好地管理车载分簇,优化车载资源管理,提升方案的灵活性[9-10]。
1 基于模糊逻辑来选择簇头的方案
1.1 系统设计
如图1 所示,车载自组织网络中车辆沿着道路行驶,使用着各式各样的应用设备。车载网络中还会布置许多路边单元,这些路边单元能与在其通信范围内的车辆进行通信[11-12]。网络中的车辆构成了动态的簇,并从这些车辆中挑选出每个簇中更适合成为簇头的车辆。其中簇头充当车载云的控制器,负责车载云的创建、维护和删除工作,当车辆需要使用车载云中的一些资源时,它需要向簇头申请。在车载网络的资源管理方面,由簇头负责维持车载云中的资源,并且在一个云服务期间,当一个车辆(即云点)脱离簇时,簇头会规划一个新的云点来替代它[13-14]。

图1 基于分簇的车载云架构模型
1.2 基于模糊逻辑选取最佳簇头的过程
本文提出的分簇方案根据车辆的位置信息、行驶方向和车速将车辆组织成簇。每个车辆分别将自己此刻的车速和位置信息植入问候消息中,然后将其广播,以此来确定车辆间的邻近关系。沿相同方向行驶且彼此邻近的车辆将被分到同一个簇中。
文中将相对平均速度、相邻度和路边单元(Road Side Unit,RSU)链路质量作为度量标准,通过度量标准计算、模糊化与模糊隶属函数、模糊推断规则、解模糊化四个步骤选取最理想的簇头,从而可以更好地管理车载分簇,优化资源管理。
1.2.1 度量标准计算
本文将相对平均车速ψv、邻近车辆的相邻度Dn和路边单元的链路质量(Route Link Quality,RLQ)作为评判簇头稳定性的3 个度量标准。在进行拟合因子的评估时,这些度量标准将被综合分析考虑。每个车辆都需确定自己的车速与它周围邻近车辆的平均速度的邻近程度,它们的相对平均速度为:
式中:Savg是车辆v在不同时段采样得到的n个采样点的平均速度,μs是车辆v的所有邻近车辆的平均速度,δs是所有邻近车辆速度的标准差。通过计算车辆v在不同时段的平均速度,可以确定车辆v在不同时段是否在以与它的周围邻居车辆相近的速度移动。
为了建立相对稳定的簇结构,希望车辆间有更好的相邻度[15]。使用速度差来确定与车辆v真正相邻的车辆,相邻度Dn指与车辆v通信的相邻车辆的数量,且这些车辆与车辆v的车速之差均小于Sthr。
最后,借助RSU 链路质量参数RLQ,选择与RSU 通信最稳定的车辆作为动态簇头。鉴于此,选择车辆v作为动态簇头,车辆v与RSU 直接连接,并使ρ达到最大值。ρ代表车辆v和RSU的连接质量,按照式(2)进行计算。
式中:Ptx是发射机输出功率,G是发射机和接收机的总增益,L是发射机损失、接收机损失以及其他损失(如大尺度衰落、小尺度衰落、阴影衰落、干扰等)的总和。Sv指车辆无线接口的灵敏度(dB)。
1.2.2 模糊化与模糊隶属函数
分别将某时刻的相对平均速度ψυ、相邻度Dn和RSU 链路质量(RLQ)归一化为RLQ1。如果则被认为“小”;如果则被认为“大”。如果则被认为“小”;如果则被认为“大”。如果RLQ1<λ,则RLQ1被认为“小”;如果RLQ1>δ,则RLQ1被认为“大”。将上述3 个度量标准的明确数值作为模糊器的输入,并基于预定义的语言变数和隶属函数输出各度量标准对应的模糊值。下面的式(4)~(6)是上述思想的简要呈现,相对平均速度ψυ、相邻度Dn和RSU 的链路质量RLQ的模糊隶属函数如图2所示。

图2 ψυ,Dn,RLQ 的模糊隶属函数
1.2.3 模糊推断规则
基于车辆v的相对平均速度ψυ、相邻度Dn和RSU 链路质量RLQ的模糊值,推理器将这些模糊值映射到知识规则库的IF-THEN 规则中,得到车辆v成为簇头的合适度,并将其作为模糊输出值。输出的语言变量的值被分为5 种,即{极好,好,可接受,差,极差}。IF-THEN 模糊推断规则如表1 所示。

表1 IF-THEN 模糊推断规则
1.2.4 解模糊化
如图3 所示,解模糊器利用预先设定的输出隶属函数将步骤(3)中得到的模糊输出值转化为具体的拟合因子的数值。利用重心法进行解模糊化,例如当{差}、{可接受}、{好}的度值分别为0.25,0.75,0.5 时,则结果函数构成的图像如图3 所示,然后计算阴影部分的重心。其中重心的x坐标的值即为解模糊化后的所得值,它的值表示了车辆v成为簇头的合格程度,即拟合因子的数值。选择拟合因子数值最大的车辆作为簇头。

图3 重心法解模糊化过程
2 仿 真
2.1 仿真环境
本文使用OMNet++和MATLAB 工具进行仿真,仿真参数如表2 所示。仿真场景为10 km 长的高速公路,车辆行驶速度为60~120 km/h,车辆的无线装置的有效传输范围是300 m,发送速率为6 Mbit/s,信息大小为1 000 bit。对车载云架构的性能进行了仿真。
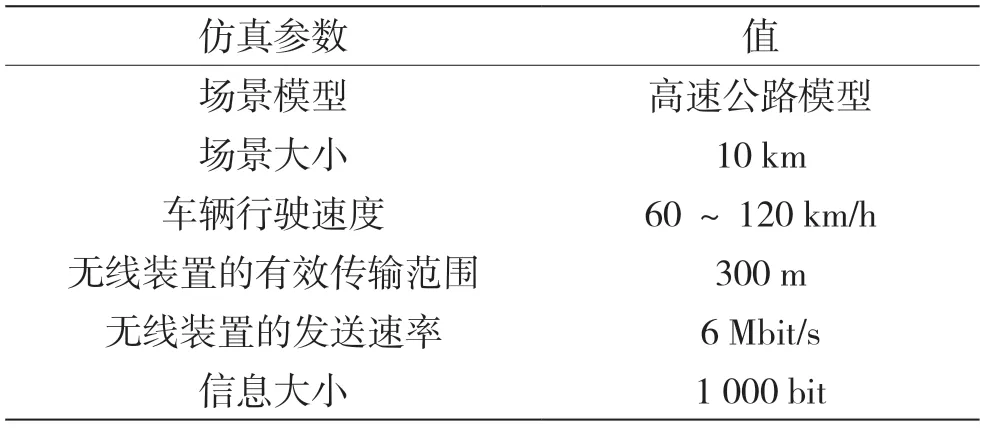
表2 系统仿真参数
文献[11]提出了CROWN 算法。本文引入该算法中性能评估的主要度量标准,然后将基于模糊逻辑选取簇头的车载云架构性能与CROWN 算法的性能进行比较。该算法的性能评估度量标准是服务发现时延和服务消耗时延。服务发现时延在文献[11]中被定义为从发送请求到收到来自云控制器的回复消息期间所花费的时间。服务消耗时延指从簇头发送提供帮助的车辆的信息到提供帮助的车辆开始提供服务期间消耗的时间。
2.2 仿真结果
本文所提架构与CROWN 算法性能的比较如图4 所示。

图4 本文所提架构与CROWN 算法性能的仿真评估
2.3 仿真分析
如图4(a)所示,无论车辆密集还是车辆稀疏的情形,本文所提算法的服务发现时延都比CROWN 算法低得多。其主要原因是本文基于簇的云架构中将基于模糊逻辑选出的簇头作为云端控制器。在CROWN 算法中,使用路边单元RSU 作为云端控制器,因而车辆需要通过相邻车辆的中继才能向路边单元发送请求,路边单元也需要借助车辆的中继来通知请求车辆最有可能满足其需求的STARs,这样大大增加了服务发现时延。
如图4(b)所示,无论车辆密集还是车辆稀疏的情形,本文所提算法的服务消耗时延都比CROWN 算法的服务消耗时延低得多,并且即使在车辆稀疏的网络环境中,本文所提算法也有很好的服务消耗时延性能。
3 结语
本文提出了一种VANET 分簇中基于模糊逻辑选择最佳簇头的方案。以相对平均速度、相邻度和RSU 链路质量为度量标准,基于模糊逻辑方法选取最理想的簇。本文方案可以增加簇头选择的灵活性。车载网络中车辆高速移动且网络拓扑频繁变换,若通过建立数学模型确定簇头则太过复杂,且缺乏灵活性。本文方案中选取邻近车辆作为簇头,可以提高簇内通信速度与质量,有效地降低时延。
