基于CKF的大型拖拉机状态参数估计研究
2024-01-01魏国俊王鸿翔王圣杰王振雨肖茂华



摘要:拖拉机运行状态的准确识别与估计是其安全行驶和平稳控制的重要依据。针对大型拖拉机状态参数的估计复杂、精确度不高等问题,建立大型拖拉机整车三自由度仿真模型,其中包含Dugoff轮胎模型,提出基于容积卡尔曼滤波理论的大型拖拉机状态参数估计算法,并对大型拖拉机的行驶参数进行估计,包含纵向速度、侧向速度、质心侧偏角、横摆角速度。利用Matlab软件仿真验证,在双移线路面附着系数为0.8和0.6的工况下,对比仿真的状态参数和算法估计的数值。结果表明,拖拉机横摆角速度、质心侧偏角和纵向速度仿真值与真实值的误差分别为0.1、0.2、0.4,验证基于容积卡尔曼滤波算法对大型拖拉机状态参数估计的可行性和准确性,为大型拖拉机的稳定性控制等提供借鉴和参考。
关键词:大型拖拉机;非线性动力学;容积卡尔曼滤波;状态参数;Dugoff轮胎模型
中图分类号:TH122; S220
文献标识码:A
文章编号:2095-5553 (2024) 04-0117-07
收稿日期:2022年12月18日" 修回日期:2023年7月14日
基金项目:国家重点研发计划项目(2022YFD2001204);江苏省现代农机装备与技术示范推广项目(NJ2023—27,NJ2021—06)
第一作者:魏国俊,男,1980年生,南京人,硕士,正高级工程师;研究方向为农业机械。E-mail: 36705562@qq.com
通讯作者:肖茂华,男,1981年生,湖南邵阳人,博士,教授;研究方向为智能农机动力装备。E-mail: xiaomaohua@njau.edu.cn
Research on state parameter estimation of large tractor based on CKF
Wei Guojun1, Wang Hongxiang2, Wang Shengjie3, Wang Zhenyu4, Xiao Maohua4
(1. Jiangsu Agricultural Machinery Testing and Appraisal Station, Nanjing, 210017, China; 2. Jiangsu Electronic
Information Vocational College, Huai’an, 223003, China; 3. Jiangsu Yueda Intelligent Agricultural Equipment Co., Ltd.,
Yancheng, 224007, China; 4. College of Engineering, Nanjing Agricultural University, Nanjing, 210031, China)
Abstract:
Accurate identification and estimation of tractor running state is an important basis for its safe driving and smooth control. Aiming at the problems of complex estimation and low accuracy of state parameters of large tractors, a three-degree-of-freedom simulation model of large tractors was established, including Dugoff tire model. The state parameter estimation algorithm of large tractor based on volume Kalman filter theory was proposed. Then, the driving parameters of large tractors were estimated, including longitudinal speed, lateral speed, sideslip angle of center of mass and yaw rate. Finally, the Matlab software was used to simulate and verify, and the simulated state parameters were compared with the values estimated by the algorithm under the condition that the adhesion coefficient of the double-shift line surface was 0.8 and 0.6. The results showed that the errors between the simulated values of yaw rate, sideslip angle of center of mass and longitudinal speed of tractor and the real values were 0.1, 0.2 and 0.4, respectively, which verified the feasibility and accuracy of estimating the state parameters of large tractors based on the volumetric Kalman filter algorithm, and provided reference for the stability control of large tractors.
Keywords:
large tractor; nonlinear dynamics; volumetric kalman filtering; state parameter; Dugoff tire model
0 引言
随着计算机信息技术的不断发展,人们对大型农用拖拉机的稳定性和安全性有进一步要求[1]。对于大型拖拉机而言,准确有效提高其操控稳定性,可以减少机械损伤,提高作业质量[2]。而拖拉机和地面状态参数的计算是安全驾驶和控制的前提。但是由于测量状态参数的传感器成本较高,且技术复杂,短周期内无法应用到大型拖拉机的实际作业的过程中[3-5]。而理想的状态参数估计方法,不但可以降低传感器成本,还可以提高硬件的可靠性和稳定性。因此,对大型拖拉机状态参数估计成了研究拖拉机稳定控制的热点和难点[6-8]。
目前针对大型拖拉机状态参数的估计研究较少,主要针对的大多是汽车,其应用领域更为广泛。现阶段参数估计方法主要有扩展卡尔曼滤波EKF(Extended Kalman Filter)、无迹卡尔曼滤波UKF(Unscented Kalman Filter)和容积卡尔曼滤波CKF(Cubature Kal-man Filter)[9]。其中CKF算法是一种新型滤波算法[10],已应用到航天领域[11]。由于CKF是在EKF和UKF的基础上进行优化,因此其具有更大的优势,比如概率密度分布精度高,矩阵计算简单,易于实现,避免了累计误差[12, 13]。与此同时,相较于UKF,CKF无须设置参数,适应度高,计算速度快。因此利用CKF对大型拖拉机状态参数进行估计,具有一定的优势。
在拖拉机行驶参数估计方面,国内外学者也进行了相关理论和应用的研究。Hahn等[14]采用的方法主要是利用车辆侧向运动状态进行状态参数的估计,之后又用差分GPS系统和陀螺仪两者的测量值进行状态参数的估计,最后进行了仿真验证,将其应用到干燥和湿滑两种不同的路面。在状态参数的估计方面,主要是对相关算法的改进。如Tanelli等[15]提出一种在线估计的算法,利用摩擦曲线和速度经验估计进行路面状况的估计,最终实现复杂状态路面的状态参数估计。陈锦曦[16]利用CKF进行状态参数的估计,其轮胎模型选择魔术公式,并能准确地估计侧向力。李刚等[17]采用了双容积卡尔曼滤波算法对状态参数进行估计,并在驾驶模拟器在环试验进行了验证,结果表明,可以准确实现对车辆状态的估计。从以上文献可以看出,对于车辆的行驶参数和状态的研究,主要侧重于算法和参数的改进和完善。
本文主要以大型拖拉机为研究对象,建立大型拖拉机整车仿真模型。进一步采用容积卡尔曼滤波算法对大型拖拉机的状态参量进行估计。对大型拖拉机的行驶参数进行估计,主要包含纵向速度、侧向速度等。利用Matlab软件进行仿真验证,分析得出基于容积卡尔曼滤波算法对大型拖拉机状态参数估计的可行性和准确性,为大型拖拉机的稳定性控制等提供借鉴和参考。
1 大型拖拉机动力学模型
1.1 三自由度拖拉机动力学模型
大型拖拉机在做转向的运动过程中,由于侧向加速度的影响,会出现侧向偏力,主要是针对轮胎而言,因此拖拉机整体会出现侧偏的趋势。由于大型拖拉机前后轮的重量不同,其与路面的附着力也有很大差别,这就会令拖拉机产生横向的摆动,与此同时,其纵向驱动力也会随之发生变化。因此,根据拖拉机的运动状态模型,采用动力学分析的方法来实现状态状态参数的估计。进行运动学估计,首先需要建立拖拉机的动力学模型,并计算得到它的动力学方程。综合考虑模型的复杂性,本文以四轮驱动拖拉机模型为例,建立如图1所示的大型拖拉机转向运动学模型。
1.2 Dugoff轮胎模型
对大型拖拉机的状态参数进行估计时,需要计算地面与轮胎相互运动的参数,因此就需要选择一个合适的轮胎模型来对真实的行驶状态进行模拟。目前应用较多的模型主要有Fiala、Unitire、魔术公式和Dugoff轮胎模型等[19-22]。这些轮胎模型可分为理论、半经验和经验模型。
其中理论模型主要是依靠轮胎的实际形变过程进行建立,需要考虑轮胎的物理结构和材料性能,这些因素决定了轮胎力学特性的研究深度。而实际拖拉机的作业环境是处于干旱和湿润等不同土壤作业环境中,考虑到实际作业环境的需求,本文选用Dugoff轮胎模型进行建立。
Dugoff轮胎模型描述轮胎的纵滑侧偏,并假设轮胎与地面的接触形状为矩形,在物理参数的设定上清晰明确,而且侧向力、纵向力和路面附着系数的关联明显,有利于对拖拉机和路面两者间的状态参数进行估计。此模型的研究基础较为成熟,也便于借助软件进行模型的搭建和仿真。Dugoff轮胎模型的输入参数主要是滑动率、侧偏角和垂向力,输出的是归一化纵向力和侧向力。图2为该模型的原理图。
2 拖拉机状态参数容积卡尔曼滤波估计设计
2.1 拖拉机状态参数估计算法设计
在建立完成拖拉机动力学整车模型和轮胎模型后,可以根据动力学方式间接识别车辆的状态参数,当前采用较多的方案是改进各种卡尔曼滤波方式进行估计,如经典卡尔曼、扩展卡尔曼、容积卡尔曼[23, 24]等方式。这些基于卡尔曼滤波的方法在不断创新,使得车辆状态参数的估计效果也越来越精准。因此本文将采用容积卡尔曼滤波器对拖拉机行驶状态参数进行估算。
图3为拖拉机的状态参数估计流程,首先进行参数输入,依据建立的三自由度整车面模型和轮胎模型,设计CKF的算法模型,通过在CKF模型中调整输入参数进行数据输出,使估计值和仿真值的误差较小,从而实现拖拉机行驶状态参数的估计。
2.2 容积卡尔曼滤波估计设计
容积卡尔曼滤波理论主要是由贝叶斯理论发展而生,主要原理是将非线性滤波方式转变为概率密度函数的积分求解,从而简化过程,便于操作。
本节主要研究容积卡尔曼非线性滤波状态估计器,以此实现对大型拖拉机行驶纵向速度、侧向速度、质心侧偏角等常见重要状态参量的实时观测。根据所搭建的非线性整车动力学模型和测量信息,建立非线性系统的状态方程与测量方程。
因为容积Kalman滤波估计算法也是一种递推的预估一一校正算法,需要对拖拉机非线性动力学观测器系统进行离散化,构建非线性拖拉机估计离散化方程,根据贝叶斯非线性滤波原理和三阶球面—径向准则,推导非线性车辆状态CKF滤波状态估计算法。图4为CKF滤波算法的流程图,首先进行时间更新,包含计算容积点、参数预测和协方差预测,然后进行测量更新,更新步骤和时间更新类似,之后计算互协方差和增益,从而进行参数测量输出。
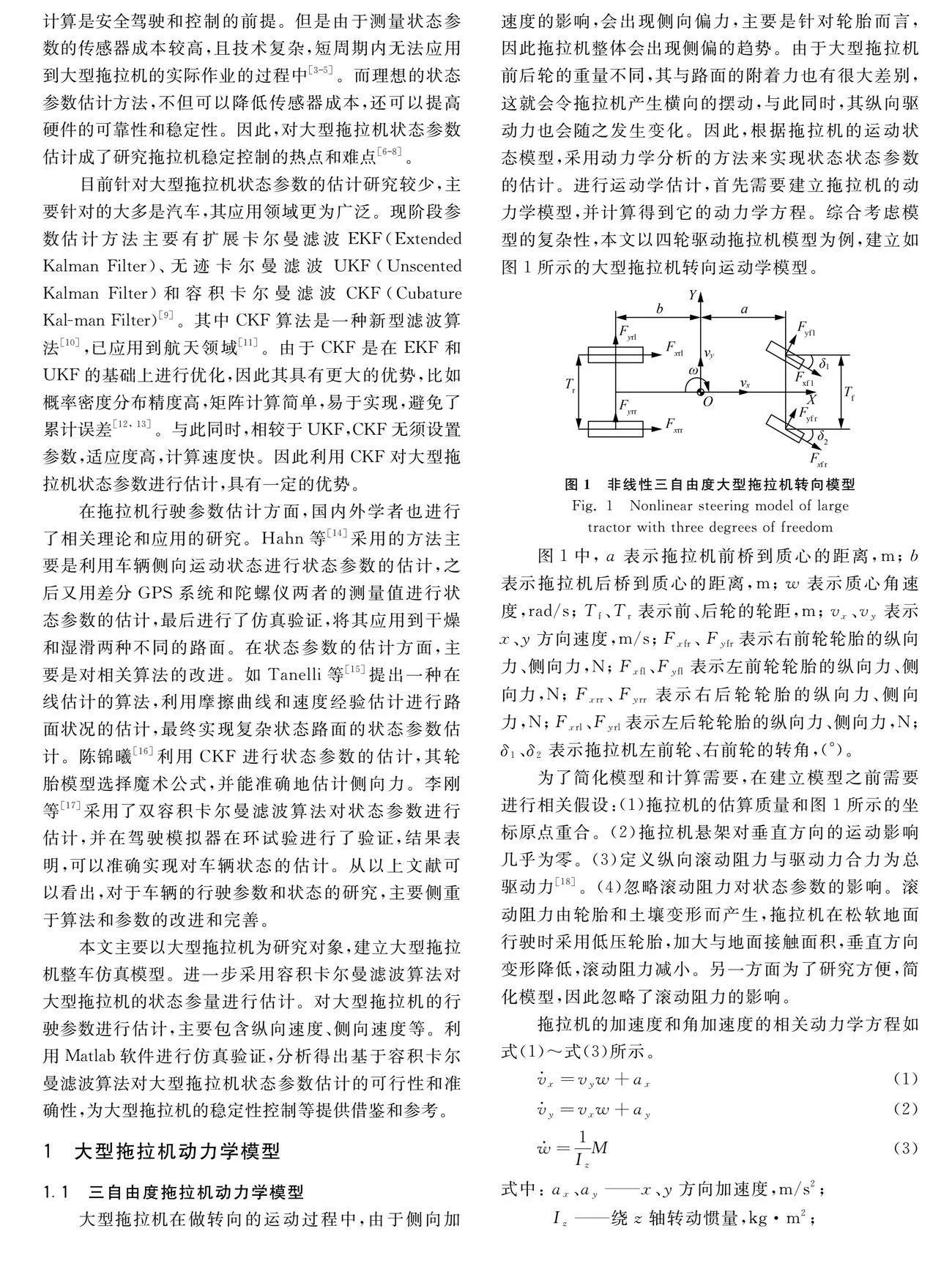
最后在Simulink中搭建拖拉机整车模型和轮胎模型,并编写容积卡尔曼滤波估计算法,通过仿真试验验证算法的有效性和可靠性。图5和图6分别为在Simulink中搭建的拖拉机三自由度整车模型和容积卡尔曼滤波的部分设计模型。
3 拖拉机状态估计算法验证
为了验证容积卡尔曼滤波状态估计模型的有效性,本文采用Simulink进行仿真试验,使用此仿真软件编程实现CKF控制,将归一化的轮胎力和转角、拖拉机的相关参数输入到CKF程序中,实时估计轮胎的状态参数,拖拉机车辆模型的部分参数如表1所示。
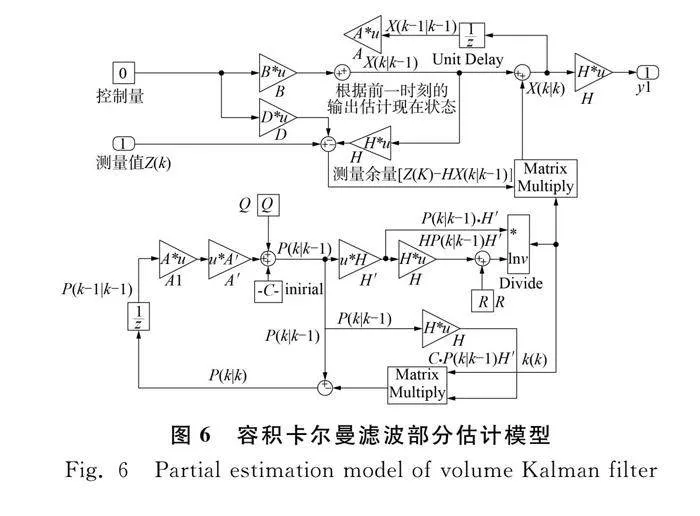
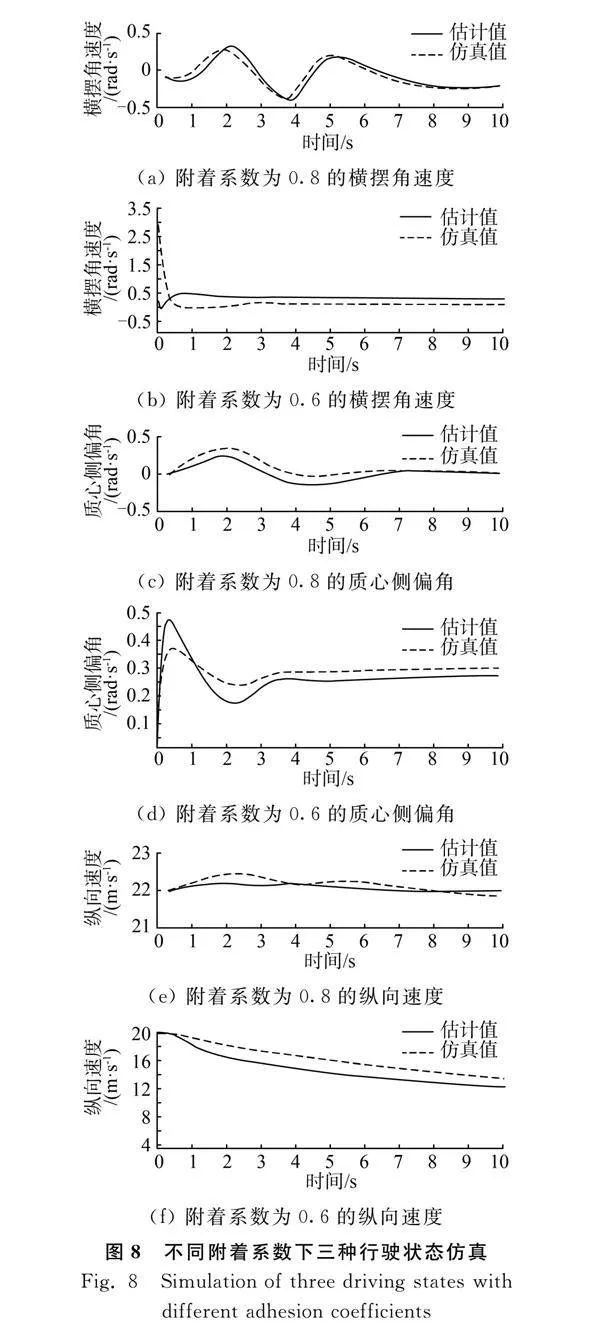
为验证本算法的可靠性,首先选择典型的双移线工况进行验证。拖拉机的初始速度设置为26.4 km/h,附着系数为0.8和0.6,在附着系数的选取上,主要参考了相关文献和试验数据[25],具有代表性和广泛性。时间为10s,对应的转向角输入曲线如图7所示。基于容积卡尔曼滤波算法,估计拖拉机的横摆角速度、纵向速度和质心侧偏角,对比分析估计值和仿真值,如图8所示。
由图8(a)和图8(b)可以看出附着系数为0.8时,此程序输出的横摆角速度仿真值和实际估计值曲线相拟合,误差约为0.1,而附着系数为0.6时,横摆角速度的仿真值误差相对较大。
由图8(c)和图8(d)可知,附着系数为0.8时,质心侧偏角的仿真值和实际估计值基本保持一致,而附着系数为0.6时,两者波动较大。纵向速度的趋势和横摆角速度、质心侧偏角相类似。说明附着系数为0.8时,CKF估计的横摆角速度、质心侧偏角和纵向速度更精准。与此同时,从仿真结果可知,CKF算法过滤噪声明显,可以根据已知量来估计未知量,在拖拉机参数估计上具有显著效果。
通过不同附着下对比发现,横摆角速度、质心侧偏角和纵向速度等值与真实值相似度高,能准确地为控制系统提供信息保障。
4 结论
1)" 首先建立大型拖拉机整车模型,在Simulink中搭建模型,利用双移线工况进行分析,大型拖拉机的仿真运动轨迹和状态趋势吻合,验证动力学模型的合理性。
2)" 在Simulink模型计算中可得到拖拉机各侧轮胎的转速与拖拉机前轮轮胎转角,利用Matlab程序可进行容积卡尔曼滤波模型计算,得出大型拖拉机的各种状态参量,最后利用容积卡尔曼滤波算法估计值与仿真数据进行比较,结果表明计算准确度高、稳定性好,趋势基本一致。
3)" 在仿真试验过程中,采用两种不同的附着系数进行估计,模拟拖拉机在两种不同状态下的行驶状态,令仿真结果具有真实可靠性。
参 考 文 献
[1] 胡丹. 基于双扩展卡尔曼滤波的汽车状态及路面附着系数估计算法研究[D]. 长春: 吉林大学, 2009.
Hu Dan. Research on the vehicle state and road tire friction coefficient eatimation based on dual extended kalman filter [D]. Changchun: Jilin University, 2009.
[2] 时艳茹. 基于UKF滤波的汽车纵向和侧向速度估计算法研究[D]. 长春: 吉林大学, 2011.
Shi Yanru. Vehicle longitudinal and lateral velocity estimation based on unscented Kalman filter [D]. Changchun: Jilin University, 2011.
[3] 刘义, 杨鹏. 基于卡尔曼滤波的云台自适应姿态优化算法[J]. 自动化与仪表, 2022, 37(11): 80-86.
Liu Yi, Yang Peng. Adaptive attitude optimization algorithm of PTZ based on Kalman filter [J]. Automation amp; Instrumentation, 2022, 37(11): 80-86.
[4] Oei M, Sawodny O. Vehicle parameter estimation with Kalman filter disturbance observer [J]. IFAC Papers On Line, 2022, 55(27): 497-502.
[5] Sunusi I I, Zhou J, Wang Z Z, et al. Intelligent tractors: Review of online traction control process [J]. Computers and Electronics in Agriculture, 2020, 170: 105176.
[6] Kim J S, Lee D K, Ahn C K. Receding horizon directional unscented filter for heavy-duty vehicles incorporating sensor modeling constraints [J]. Measurement, 2021, 183: 109874.
[7] 李斌飞, 崔世钢, 施国英, 等. 基于无迹卡尔曼滤波的农用无人机定位研究[J]. 中国农机化学报, 2020, 41(9): 156-161.
Li Binfei, Cui Shigang, Shi Guoying, et al. Research on agricultural unmanned aerial vehicle positioning based on unscented Kalman filter [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(9): 156-161.
[8] 胡敬宇, 汪, 严永俊, 等. 基于限定记忆随机加权扩展卡尔曼滤波的车辆状态估计[J]. 东南大学学报(自然科学版), 2022, 52(2): 387-393.
Hu Jingyu, Wang Gong, Yan Yongjun, et al. Vehicle state estimation based on limited memory random weighted extended Kalman filter [J]. Journal of Southeast University (Natural Science Edition), 2022, 52(2): 387-393.
[9] 林棻, 赵又群. 基于双重扩展自适应卡尔曼滤波的汽车状态和参数估计[J]. 中国机械工程, 2009, 20(6): 750-755.
Lin Fen, Zhao Youqun. Vehicle state and parameter estimation based on dual extended adaptive Kalman filter [J]. China Mechanical Engineering, 2009, 20(6): 750-755.
[10] Arasaratnam I, Haykin S. Cubature kalman filters [J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[11] 魏喜庆, 宋申民. 无模型容积卡尔曼滤波及其应用[J]. 控制与决策, 2013, 28(5): 769-773.
Wei Xiqing, Song Shenmin. Model-free cubature Kalman filter and its application [J]. Control and Decision, 2013, 28(5): 769-773.
[12] Wenzel T A, Burnham K J, Blundell M V, et al. Dual extended Kalman filter for vehicle state and parameter estimation [J]. Vehicle System Dynamics, 2006, 44(2): 153-171.
[13] Ghansah B, Benuwa B B, Essel D D, et al. A Review of non-Linear kalman filtering for target tracking [J]. International Journal of Data Analytics(IJDA), 2022, 3(1): 1-25.
[14] Hahn J O, Rajamani R, Alexander L. GPS-based reaHtime identification of tire-road friction coefficient [J]. IEEE Transactions on Control Systems Technology, 2002, 10(3): 331-343.
[15] Tanelli M, Piroddi L, Savaresi S M. Real-time identification of tire-road friction conditions [J]. IET Control Theory and Applications, 2009, 3(7): 891-906.
[16] 陈锦曦. 基于容积卡尔曼滤波的路面附着系数估计算法研究[D]. 成都: 电子科技大学, 2014.
Chen Jinxi. Research on the algorithm of the road friction coefficient estimation based on the cubature Kalman filter [D]. Chengdu: University of Electronic Science and Technology of China, 2014.
[17] 李刚, 解瑞春, 卫绍元, 等. 基于双容积卡尔曼滤波的车辆状态与路面附着系数估计[J]. 中国科学: 技术科学, 2015, 45(4): 403-414.
Li Gang, Xie Ruichun, Wei Shaoyuan, et al.Vehicle state and road friction coefficient estimation based on double cubature Kalman filter [J]. China: Science of Technology, 2015, 45(4): 403-414.
[18] 宗新怡, 李刚, 邓伟文. 四轮独立驱动电动汽车车速估计研究[J]. 机械设计与制造, 2013(9): 83-85.
Zong Xinyi, Li Gang, Deng Weiwen.Study on velocity" estimation of four-wheel independent drive electric vehicle [J]. Mechanical Design and Manufacturing, 2013(9): 83-85.
[19] 汪涛. 面向商用车的路面附着系数估计研究[D]. 重庆: 重庆邮电大学, 2019.
Wang Tao. Estimation of road adhesion coefficient for commercial vehicles [D]. Chongqing: Chongqing University of Posts and Telecommunications, 2019.
[20] 霍光. 基于容积卡尔曼滤波的单站无源定位跟踪算法研究[D]. 郑州: 解放军信息工程大学, 2013.
Huo Guang. Research on algorithms for single observer passive location and tracking based on cubature Kalman filter [D]. Zhengzhou: PLA Information Engineering University, 2013.
[21] 石求军. 基于车辆状态参数估计的商用车气压电子制动主动安全控制策略研究[D]. 长春: 吉林大学, 2021.
Shi Qiujun. Research on active safety control strategy of pneumatic electronic brake based on vehicle state estimation for commercial vehicle [J]. Changchun: Jilin University, 2021.
[22] 冯亦奇, 陈勇. 基于遗忘因子的UKF车辆状态参数估计算法[J]. 合肥工业大学学报(自然科学版), 2020, 43(11): 1450-1455, 1499.
Feng Yiqi, Chen Yong. UKF for vehicle state parameter estimation based on forgetting factor [J]. Journal of Hefei University of Technology (Natural Science Edition), 2020, 43(11): 1450-1455, 1499.
[23] 武钟财. 基于扩展卡尔曼滤波的路面附着系数估计算法研究[D]. 长春: 吉林大学, 2008.
Wu Zhongcai. Research on the algorithm of the road friction coefficient estimation based on the extended Kalman filter [D]. Changchun: Jilin University, 2008.
[24] Tanelli M, Piroddi L, Savaresi S M. Real-time identification of tire-road friction conditions [J]. IET Control Theory amp; Applications, 2009, 3(7): 891-906.
[25] Ahmadi Jeyed H, Ghaffari A. Nonlinear estimator design based on extended Kalman filter approach for state estimation of articulated heavy vehicle [J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2019, 233(2): 254-265.