基于TRIZ理论的圆柱波浪型刺梨采摘机设计与试验
2024-01-01罗兵张建敏杨义赵霞陈霁














摘要:
为解决目前刺梨机械化采摘过程中损伤大、稳定性差、采摘效率受成熟度影响的问题,设计一种适应于山区作业环境的采摘机构。基于TRIZ理论对已设计出的耙型刺梨采摘机构进行功能组件系统分析,定位有害功能和过度功能,围绕采摘效率、运行稳定性、适应性三个指标,应用TRIZ理论标准解确定发明原理,再通过物场模型寻找问题的解决方案,设计圆柱波浪型采摘结构。应用ADAMS软件进行模拟仿真,验证设计的可行性,通过三个单体组合的背负式刺梨采摘机田间试验,结果表明:刺梨采净率为96.05%;采净率受到刺梨果成熟度影响不大;破损率为0.66%;采摘效率为11.22 kg/min,此设计可有效保证刺梨机械化采摘作业的有效性和可靠性,为新型高效低损采收机研究提供重要参考。
关键词:刺梨采摘机;山区作业;TRIZ理论;背负式;圆柱波浪型结构
中图分类号:S225.92; S23
文献标识码:A
文章编号:2095-5553 (2024) 04-0039-07
收稿日期:2023年11月2日" 修回日期:2024年1月31日
基金项目:贵州省高校人文社会科学研究项目(2023GZGXRW067)——贵州农业现代化研究
第一作者:罗兵,男,1990年生,贵州仁怀人,硕士,讲师;研究方向为农机设计、产品创新设计。E-mail: 1258132509@qq.com
通讯作者:张建敏,女,1976年生,贵阳人,硕士,副教授;研究方向为工业设计、数字媒体技术。E-mail: zminmindebox@126.com
Design and experiment of cylindrical corrugated pear picker based on TRIZ theory
Luo Bing1, Zhang Jianmin2, Yang Yi1, Zhao Xia1, Chen Ji1
(1. Guizhou Light Industry Technical College, Guiyang, 550025, China;
2. College of Mechanical Engineering, Guizhou University, Guiyang, 550025, China)
Abstract:
In order to solve the current problems of high damage, poor stability, and picking efficiency affected by maturity during the mechanized picking process of roxburghii, a picking mechanism adapted to the mountainous operating environment was designed. Based on the TRIZ theory, a functional component system analysis of the designed rake-type prickly pear picking mechanism was conducted to locate harmful functions and excessive functions. Focused on the three indicators of picking efficiency, operational stability and adaptability, the TRIZ theory standard solution was used to determine the invention principle. Then the cylindrical wave-shaped picking structure was designed" by using the object field model to find a solution to the problem, ADAMS software was used for simulation to verify the feasibility of the design. Through the field test of the backpack-type pear picker with three monomer combinations, the results showed that the net harvesting rate of rhododendrons was 96.05%; the net harvesting rate was affected by the maturity of the rhododendron fruit. The impact was not significant, the breakage rate was 0.66%; the picking efficiency was 11.22 kg/min. This design effectively ensures the effectiveness and reliability of mechanized pear picking operations, and can provide an important reference for the research of new high-efficiency and low-damage harvesters.
Keywords:
prickly pear picker; mountainous operating; TRIZ theory; backpack type; cylindrical wave structure
0 引言
刺梨产业是近年来迅速发展的贵州农业特色优势产业之一。截至2022年底,贵州省刺梨种植面积已达14×104 hm2,年产量超过3×105 t,年产值超过150亿元[1, 2]。因刺梨生长特性,刺梨采摘劳动强度大、效率低,为了解决这个问题,贵州省山地农机研究所[3]、贵州师范大学[4]等研制了山地刺梨采收机和采摘工具,采收机采用履带式行走底盘和液压驱动高频振动方式,可实现一次性单窝刺梨的采摘和收集,采净率达94.42%,损伤率小于0.97%。然而,由于刺梨生长在喀斯特山区,重型履带农机平台难以进入种植园,震动式采摘机构需要一定重量和空间的震动发生装置[5, 6],很难应用在便携式的背负式平台。另外,刺梨果加工需要成熟度8-9成,而这种成熟度的果子果柄结合力较强,震动采摘难以完成。因此,适合背负式平台的刺梨采摘机构的研发迫在眉睫。
TRIZ理论[7]能科学定位和解决问题,已有多位研究人员应用TRIZ理论进行采摘机设计研究,左斌等[8]应用TRIZ理论进行采摘执行器创新设计;桓源等[9]应用TRIZ理论进行苹果采摘机器人的设计和分析;权龙哲等[10]应用TRIZ理论研究玉米根茬收获系统设计;苏建宁等[11]应用TRIZ理论设计出玫瑰花蕾采摘机,国际也有研究学者将TRIZ理论应用与自动化机械开发[12]、农业栽种机械手设计以及分析传统农业设备创新应用[13]等。ADAMS模拟仿真采摘作业,验证设计可行性,李瑞等[14]应用了ADAMS对振动式花椒采摘机进行仿真分析;张智明等[15]将采棉机采摘机构在ADMAS中进行虚拟设计与运动仿真,验证了设计的可行性;李赞松等[16]应用ADAMS仿真分析油茶果采摘装置关键部件的设计。
2021年,相关研究[17]提出耙型结构采摘机的初步方案,通过应用TRIZ理论对耙型采摘结构进行组件功能分析,该设计仍存在易卡枝、稳定性不足的问题。基于此,本文围绕采摘效率、运行稳定性、适应性3个指标,应用TRIZ理论标准解确定发明原理,通过物场模型分析,设计圆柱波浪型采摘结构,并进行仿真试验和田间试验。
1 刺梨采摘机构创新设计
1.1 刺梨采摘机的组件功能分析
图1为耙型采摘机构,图2为采摘作业过程,采摘杆件前端向末端的间隙由大到小进行过渡,采摘杆件向前推进,对刺梨枝干进行收拢,将枝干收拢到末端过程中,采摘杆件往复摆动,刺梨果受到拍打脱离枝干,达到采摘目的。限位槽限制采摘杆件上下纵向移动的,采摘杆为固定杆件机构的轴承机构组件。
但在试验过程中,发现耙型结构采摘机存在适应性差、采摘效率低、容易卡枝,影响稳定性等问题。基于发现的问题,应用TRIZ理论对耙型采摘机构进行功能组件分析。
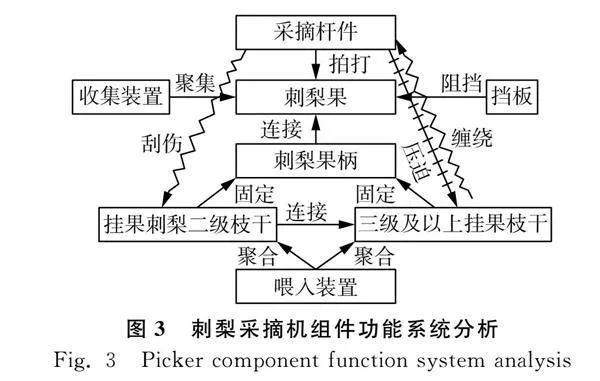
对耙型采摘机构建立功能模型分析,图3展示整个技术系统所有组件相互作用关系和所实现的功能。在耙型采摘机构运行中,开口最大处喂入刺梨挂果枝干,挂果枝干进入采摘杆件之间缝隙,通过往复运动的采摘杆件对挂果枝干拍打,让刺梨果脱落,达到采摘目的。在此过程中,采摘杆件往复拍打容易对刺梨枝干造成损伤,同时采摘杆件之间的间隙小于刺梨枝干,容易造成对刺梨枝干的过度压迫,导致二三级枝干卡在或缠绕在采摘机构中,对采摘运行稳定性产生不利影响。
通过组件功能系统分析,定位了有害功能和过度功能:一是采摘杆件容易造成刺梨枝干损伤。二是由于间隙固定,容易造成对刺梨枝干压力过大,导致刺梨枝干不容易脱落于采摘杆件,造成刺梨枝干缠绕在杆件上,影响运行稳定性。
1.2 运用TRIZ工具解决问题
通过对耙型采摘机构功能模型分析,确定需要提高采摘率和稳定性。耙型采摘机结构大,很难适应小型化平台,所以还需要提高适应性。根据TRIZ理论的39个工程参数,将提高采摘率转化为“生产率”参数,提高稳定性转化为“可靠性”参数,提高适应性转化为“适应性”参数。
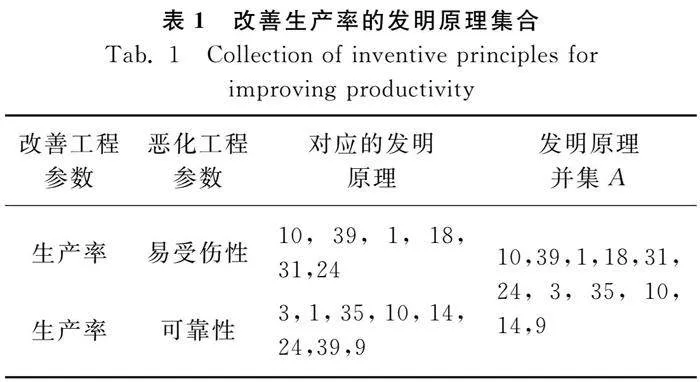
若提高采摘率(生产率),可以通过提高采摘杆件摆动频率或幅度来达到,这样则会增加刺梨枝干受伤程度,还会增加卡枝频率,降低可靠性,所以恶化参数为“易受伤性”和“可靠性”。基于矛盾矩阵表,检索到与矛盾组对应的发明原理,取发明原理的并集A。改善生产率的发明原理集合如表1所示。
若需提高稳定性(可靠性),可以通过降低摆幅频率和幅度来达到,这样则会导致采摘率降低,所以恶化参数为“生产率”,基于矛盾矩阵表,检索到与矛盾组对应的发明原理,取发明原理的并集B。改善可靠性的发明原理集合如表2所示。
若需让刺梨采摘机构能在不同平台和环境下使用,提高适应性,可以简化采摘机构结构,这样则会导致采摘率降低,机构可靠性降低,所以恶化参数为“生产率”和“可靠性”。基于矛盾矩阵表,检索到与矛盾组对应的发明原理,取发明原理的并集C。改善适应性的发明原理集合如表3所示。
此次设计改进的目标是既要提高采摘效率,又要增强采摘运行稳定性,还要提高采摘机构的适应性。因此对上三个表格中的发明原理集合A、B、C取交集后得出后续改进可行的思路。
A={10,39,1,18,31,24,3,35,10,14,9}
B={35,1,10,28,29,32,33}
C={10,39,1,18,31,24,3,35,10,14,9}
A∩B∩C={1,10,35}
上述发明原理取交集为:1,10,35,根据TRIZ原理指引,可以从编号为1(分割原理),10(预先作用),35(物理或化学参数改变原理)的发明原理着手去探索。发明原理分析如表4所示。
通过发明原理对应的方向进行可行性分析,为解决问题提供了设计思考方向,并进行衍化设计。
1.3 进行方案衍化设计
通过对3个方案进行整合,根据方案1加入喂入装置设计,并将喂入装置于采摘杆件进行结合;根据方案3将喂入装置和采摘装置进行弯曲处理,衍化设计见图4。最终形成了圆柱波浪型采摘机构设计单体。根据方案2,将单体进行组合,根据承载平台或作业环境进行不同数量和尺寸组合,增加了采摘机构的适应性。
1.4 建立TRIZ物场模型
对圆柱波浪型采摘机构设计进行分析,采摘机构在旋转过程中,刺梨枝干进行横向移动,导致末端聚集大量枝干,造成刺梨枝干受到压力逐渐增大,压力大于枝干表皮最大耐受力,此时刺梨枝干受到损伤,容易造成枝干卡在采摘杆件内。为更清晰分析此过程,将整个采摘过程进行了横向和纵向分析。
1) 刺梨采摘机横向分析。
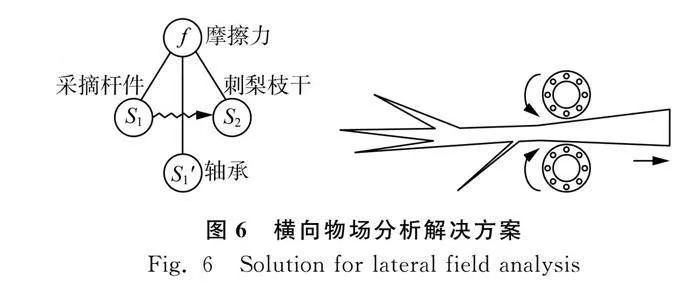
图5为横向受力分析图及物场分析,采摘机构在旋转过程中,采摘杆件相对刺梨枝干进行横向移动,产生横向的摩擦力,会进一步损伤枝干,造成枝干采摘杆件中,影响采摘稳定运行。
2) 物场模型解决方案。
通过加入滚动轴承圆柱型采摘杆件,将滑动摩擦变动为滚动摩擦,降低刺梨枝干预采摘杆件的摩擦力,如图6所示。
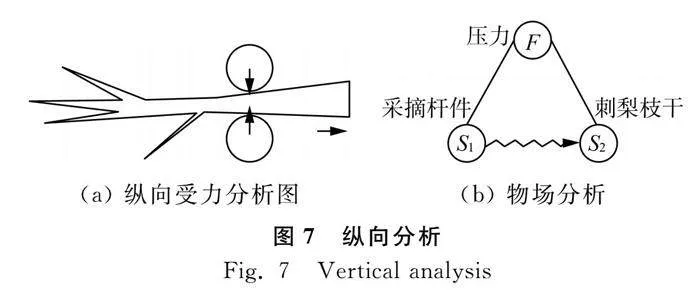
3) 刺梨采摘机纵向分析。
图7为纵向受力分析图及物场分析。采摘机构在旋转过程中,刺梨枝干从末端向中心聚集,聚集到一定程度,由于采摘杆间隙固定,当间隙容纳枝干数量到最大程度,刺梨采摘杆件对刺梨枝干压力达到最大,造成刺梨枝干卡在采摘杆件中。
4) 物场模型解决方案。
当刺梨枝干进入采摘区域,枝干聚集数量增多,对采摘杆件会产生纵向挤压,采摘杆件产生位移,杆件移动使得弹簧杆件产生形变对采摘杆件产生反作用的弹力,通过预先装配一定弹性系数的弹簧,使得刺梨枝干受到的杆件纵向压力维持在一个合理区间,从而避免采摘机构对刺梨枝干表皮产生破坏。加入弹簧组还可以在采摘杆件中形成一定的可变间隙,间隙可以随着枝干聚集程度进行调节,避免刺梨枝干卡在枝干间隙中,如图8所示。
2 采摘部件设计
2.1 圆柱波浪型机构设计分析
经过物场模型分析,形成了最终的波浪型采摘机构设计,图9为采摘机构拆解图,采摘机构由多个单体模块组成,图10为采摘机构的组合状态,每个单体由波浪型采摘杆件,轴承圆管、固定装置组成,波浪型采摘杆件顶部和底部与轴承圆管形成垂直交错连接,圆管固定在固定装置上,构成一个单体。装置中间空心,各个单体通过传动轴穿过装置中间空心进行组合,单体之间由弹簧隔开。
动力传动装置带动传动轴进行转动,因为各个单体横向限位固定在传动轴上,从而带动整组采摘机构转动,采摘机构在转动过程中,波浪形杆件之间间隙从大过渡到小。这个过程经历了喂入区域和收拢区域,挂果枝干从上下间隙较大的采摘杆件进入采摘滚筒内,随着转动,上下间距进行缩小,挂果枝干受到上下两个杆件的压力被迫进行收拢,果子在收拢过程中一部分受到挤压力脱落,挂果枝干继续随着转动进入了两颗轴承圆管之间,两颗轴承圆管形成齿状结构,接着枝干从轴承圆管之间通过,圆管之间距离小于果子直径,无法从两颗圆管之间出来,阻挡果子通过,受到拉力后脱落。圆柱形采摘机构继续转动,新的挂果枝干再次进入,完成持续采摘。
因为采摘杆件为光滑金属管,与枝干接触过程中摩擦力较小,避免了刮伤枝干,为了减小圆管与枝干的摩擦力,圆管内部用了滚动轴承,将滑动摩擦转化成了滚动摩擦,极大程度减少了刺梨枝干和圆管之间的摩擦力,进一步降低了对枝干造成损伤。
较粗的枝干进入单体采摘杆件之间,两杆件和枝干之间的压力增大,增大到一定程度后,通过弹簧组调节,两单体之间的距离增大,从而让枝干能够顺利通过间隙,提升了运行稳定性。该机构可根据安装平台对尺寸、数量进行模块化组合,具有较高的适应性。
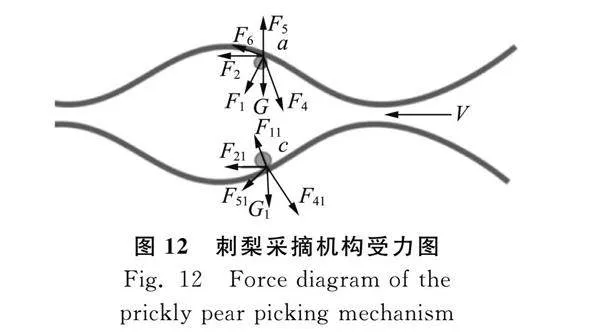
2.2 采摘机设计受力分析
图11为采摘过程,图12为刺梨采摘机构的受力图,a点为接触到上采摘杆件的刺梨枝干,枝干受到杆件的支撑力F1、刺梨杆本身的拉力F4、杆件横向运动产生的切力F2、自身由于形变产生的弹力F5、刺梨枝干对杆件压力产生的摩擦力f6、重力G1。
刺梨枝干进入相对静止的刺梨枝干旋转的杆件最大空隙处,刺梨果和枝干受力如图12所示。
杆件到合力进入最窄的脱果横杆处,刺梨枝干受力情况如图13(a)所示。枝干受到采摘杆件的支撑力F13、刺梨杆本身的拉力F43、杆件横向运动产生的切力F23、自身由于形变产生的弹力F53、刺梨枝干对杆件压力产生的摩擦力f63、重力G3。图13(b)为刺梨果受力图,刺梨表皮受力点接触到下采摘杆件的刺梨枝干,枝干受到杆件的支撑力F14、刺梨杆本身的拉力F44、自身由于形变产生的弹力F54、刺梨枝干对杆件压力产生的摩擦力f64、重力G4。刺梨果进入单体机构的上下横杆处,受到了上横杆的支撑力F15、下横杆支撑力F16、与上脱果横杆摩擦力f65、与下横杆摩擦力f66、果柄结合力F7,要使刺梨果脱落,刺梨果受到向左的力需大于果柄结合力。
3 圆柱波浪型采摘机构仿真及试验分析
3.1 刺梨圆柱波浪型采摘机构仿真分析
根据对刺梨的刺梨果柄结合力数据[12],在ADAMS中建立挂果刺梨仿真模型,对刺梨果和刺梨枝干进行力学约束,预设刺梨果受到大于刺梨果果柄结合力时,刺梨果脱落,并监测刺梨果在整个采摘过程中的受力数据。在ADAMS中导入圆柱波浪型采摘机构模型,设定采摘机构运行轨迹,通过对前进速度,机构转速参数进行赋值,验证不同转速和前进速度下,仿真刺梨果受力分析,得到最优参数,见图14。
经过ADAMS仿真,多次调节采摘机构旋转速度和前进速度,确定了前进速度为1 m/min,旋转速度为26 r/min,此时采摘过程中,刺梨果受力在40 N到50 N之间,此时受力大于刺梨果果柄脱离力的最大的30 N数值。能较好完成采摘过程。
3.2 圆柱波浪型刺梨采摘机田间试验
此次采摘机为背负式电动平台,采摘头由3组单体组成,见图15。2023年9月28日,在贵州省龙里县十里刺梨沟景区刺梨种植园区进行田间试验。采摘刺梨品种为贵龙五号,果树年龄4~6年,对成熟度70%~80%、80%~90%、90%~100%三种不同成熟度刺梨果进行采摘。各指标计算如式(1)~式(3)所示。
PH=QFQT×100%
(1)
式中:
PH——采净率,%;
QF——采摘掉落数,个;
QT——单植株挂果数,个。
PD=QDQT×100%
(2)
式中:
PD——破损率,%;
QD——刺梨果损伤数,个;
QT——单植株挂果数,个。
SH=QFT
(3)
式中:
SH——采摘效率,kg/min;
QF——采摘掉落数,kg;
T——采摘作业时间,min。
在田间作业过程中,为了保证结果的可靠性,结果取平均值[18],试验结果见表5。
试验表明,采净率与创新设计前的耙型结构采摘机的80.61%相比,提升了19.15%;破损率与耙型结构采摘机的8.91%相比,降低了92.59%;采摘效率与耙型结构采摘机的8.23 kg/min相比,提升了36.33%。说明圆柱波浪型刺梨采摘机的设计可保证刺梨机械化采摘作业的有效性和可靠性。
4 结论
1) 基于TRIZ理论设计一种圆柱波浪型采摘机构,单个模块由波浪形采摘杆件、轴承圆管、弹簧限位装置、固定装置及传动轴5部分组成。可根据安装平台、采摘环境对模块的尺寸、数量进行调整后组合,具有较高的适应性。
2) 田间试验表明:圆柱波浪型刺梨采摘机采净率受刺梨果成熟度影响不大,采摘率为96.05%;破损率为0.66%;采摘效率为11.22 kg/min,此数据为3组单体组合作业结果,若增加单体尺寸和和数量,应用中大型采摘平台,数据将进一步提升。
参 考 文 献
[1] 唐糖. 丰产又丰收!2023年贵州刺梨鲜果产量达35万吨, 产值超180亿元[N]. 人民网, 2023-9-20.
[2] 郭旭, 胡灿, 卢小兵, 等. 贵州省刺梨产业高质量发展问题及对策研究[J]. 北方园艺, 2021(21): 143-151.
Guo Xu, Hu Can, Lu Xiaobing, et al. Study on the problems and countermeasures of high quality development of rosa roxburghii tratt industry in Guizhou province [J]. Northern Horticulture, 2021 (21): 143-151.
[3] 游正兰. 贵州探索刺梨机械化(新机具)采收[N]. 当代先锋网, 2023-9-28.
[4] 周江, 吴一晨, 孙子健, 等. 山地刺梨自动采摘机的设计[J].安徽农学通报, 2023, 29(6): 74-76, 102.
Zhou Jiang, Wu Yichen, Sun Zijian, et al. Design of automatic picker for mountain rosa roxburghii [J]. Anhui Agricultural Bulletin, 2023, 29(6): 74-76, 102.
[5] 尚书旗, 李成鹏, 何晓宁, 等. 高酸苹果振动式采摘机设计与试验[J]. 农业机械学报, 2023, 54(3): 115-125, 168.
Shang Shuqi, Li Chengpeng, He Xiaoning, et al. Design and experiment of high-acid apple vibrating picker [J]. Journal of Agricultural Machinery, 2023, 54(3): 115-125, 168.
[6] 刘进宝, 韩长杰, 杨宛章, 等. 振动式林果采摘机械的设计[J]. 中国农机化学报, 2014, 35(3): 41-44, 58.
Liu Jinbao, Han Changjie, Yang Wanzhang, et al. Design of a vibrating fruit picking machinery [J]. Journal of Chinese Agricultural Mechanization, 2014,35 (3): 41-44, 58.
[7] 周苏. 创新思维与TRIZ创新方法[M]. 北京: 清华大学出版社, 2015.
[8] 左斌, 陈艳军. 基于TRIZ理论的采摘执行器创新设计[J]. 中国农机化学报, 2021, 42(4): 22-27.
Zuo Bin, Chen Yanjun. Innovative design of picking end-effector based on TRIZ theory [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(4): 22-27.
[9] 桓源, 任工昌, 孙建功, 等. 基于TRIZ理论苹果采摘机器人的设计与分析[J]. 机械传动, 2023, 47(5): 51-56.
Huan Yuan, Ren Gongchang, Sun Jiangong, et al. Design and analysis of apple picking robots based on TRIZ [J]. Journal of Mechanical Transmission, 2023, 47 (5): 51-56.
[10] 权龙哲, 曾百功, 马云海, 等. 基于TRIZ理论的玉米根茬收获系统设计[J]. 农业工程学报, 2012, 28(23): 26-32.
Quan Longzhe, Zeng Baigong, Ma Yunhai, et al. Design of corn stubble harvester based on TRIZ theory [J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(23): 26-32.
[11] 苏建宁, 魏晋. 基于AHP/QFD/TRIZ的玫瑰花蕾采摘机设计[J]. 机械设计, 2020, 37(8): 121-126.
Su Jianning, Wei Jin. Design of rose buds picking machine based on AHP/QFD/TRIZ [J]. Journal of Machine Design, 2020, 37(8): 121-126.
[12] Caco M, Kohár R, Hrcek S, et al. Use the method of TRIZ in optimizing automated machine for ultrasonic welding [J]. Procedia Engineering, 2017, 192: 80-85.
[13] Cho S. Characteristics of traditional farm equipment in korea from the viewpoint of TRIZ’s invention principle [C]. New Opportunities for Innovation Breakthroughs for Developing Countries and Emerging Economies: 19th International TRIZ Future Conference, 2019: 458-471.
[14] 李瑞, 武逸凡, 李守太, 等. 基于ANSYS Workbench和ADAMS的振动式花椒采摘机仿真分析及参数优化[J]. 西南大学学报(自然科学版), 2021, 43(12): 57-66.
Li Rui, Wu Yifan, Li Shoutai, et al. Simulation analysis and parameter optimization of a prickly ash vibration picker based on ANSYS workbench and ADAMS [J]. Journal of Southwest University (Natural Science Edition), 2021, 43(12): 57-66.
[15] 张智明, 张宏文, 王卉敏, 等. 水平摘锭式采棉机采摘机构的虚拟设计与运动仿真[J]. 中国农机化学报, 2014, 35(3): 31-34.
Zhang Zhiming, Zhang Hongwen, Wang Huimin, et al. Virtual design and kinematic simulation for horizontal spindle type cotton picker with picking mechanism [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(3): 31-34.
[16] 李赞松, 曹成茂, 伍德林, 等. 油茶果采摘装置关键部件的设计与试验[J]. 安徽农业大学学报, 2021, 48(2): 292-298.
Li Zansong, Cao Chengmao, Wu Delin, et al. Design and test of key components of camellia oleifera fruit picking device [J]. Journal of Anhui Agricultural University, 2021, 48 (2): 292-298.
[17] 罗兵. 基于TRIZ理论的刺梨采摘机创新设计研究[D]. 贵州: 贵州大学, 2021.
Luo Bing. Research on innovative design of cili picker based on TRIZ theory [D]. Guizhou: Guizhou University, 2021.
[18] 李国杰, 邓干然, 吴洪珠, 等. 4UMZ-1400型后收集式木薯联合收获机设计与试验[J]. 中国农机化学报, 2022, 43(3): 1-8.
Li Guojie, Deng Ganran, Wu Hongzhu, et al. Design and experiment of 4UMZ-1400 rear-collected type cassava combined harvester [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(3): 1-8.