基于双目立体视觉的变电站空间毫米级区域故障三维场域监测方法
2023-12-27李文伟朱龙陈子文
李文伟,朱龙,陈子文
(1.广西电网有限责任公司钦州供电局,广西 钦州 535000;2.南京南瑞继保电气有限公司,江苏 南京 530023)
由于我国城市化进程速度较快,人们需求量较大,变电站也因此加重自身负荷,影响了变电站的工作运行效率[1-2],且易出现变电站故障。如果有些故障没有被及时监测到,又位于变电站空间毫米级区域,对变电站进行检修时就容易出现漏检。为了改善这一问题,需要对变电站空间毫米级区域故障三维场域开展以下监测研究。
王竞等人[3]提出牵引变电站直流断路器机械状态监测与故障诊断研究方法,为了监测出变电站故障,该方法以直流断路器为对象,采集该设备的信号,从中确定变电站传感器的主要型号,再通过提取信号特征模拟出常见的故障,在监测出变电站故障的同时还判断出故障类型,该方法采集的振动信号不够全面,存有监测效果差的问题。王鸣誉等[4]提出利用Apriori算法实现变电站二次系统故障诊断方法,该方法优先对SCD文件开展了解析,然后从中构建出变电站物理回路的映射关系,根据以往的历史故障数据对变电站二次系统回路开展故障监测,并采用Apriori算法对监测到的故障信息关联规则进行计算,从中判断出变电站故障类型,在监测到变电站故障的同时还诊断出变电站故障,该方法的计算结果存有误差,存在监测精度低的问题。陈军等人[5]提出Petri网智能变电站保护控制故障诊断与定位方法研究,该方法优先获取了变电站数据,根据获取结果构建变电站Petri模型,利用该模型对变电站设备状态进行故障监测,并将监测结果输送到Petri子网中,以此取得变电站故障信息状态,最终依据获取结果利用Petri网模型对变电站故障状态进行故障定位,实现变电站故障监测诊断与定位,该方法获取的故障状态存有欠缺,存在监测有效性低的问题。
因此,提出基于双目立体视觉的变电站空间毫米级区域故障三维场域监测方法。
1 三维区域图像校正
1.1 双目立体视觉模型建立
双目立体视觉[6]可以模拟人眼利用设置的双摄像头对想要获取的目标定位,通过对比图像与成像之间的差异性,从中获取目标的三维位置数据,实现目标体的标定,完成目标体的图像获取。
针对双目立体视觉的工作原理,采用双目立体视觉对变电站空间毫米级区域故障三维场域的三维位置信息进行标定,从而实现变电站三维空间毫米级区域故障三维区域图像采集。为此基于双目立体视觉建立采集模型,如图1所示。
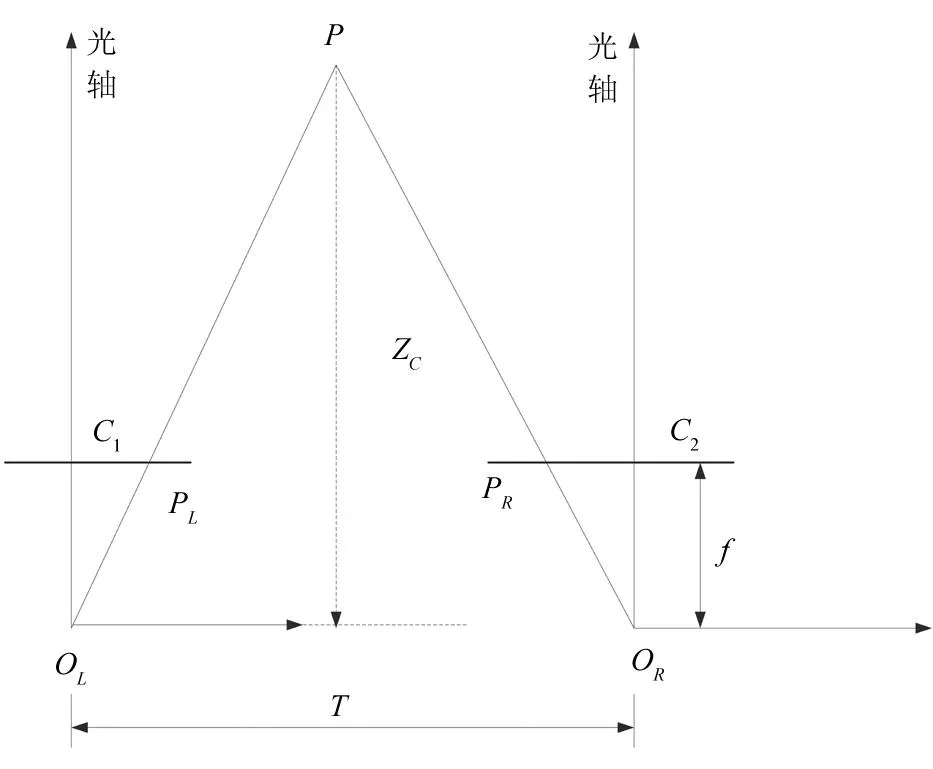
图1 构建的双目立体视觉模型示意图
图1中,(C1,C2)表示双目立体视觉的相机,其焦距与光轴相互平行且具有一致性,C1坐标系中,P属于空间位置坐标,即(XC,YC,ZC);模型中图像像素左坐标系定义为(uL,vL),右坐标系定义为(uR,vR)。
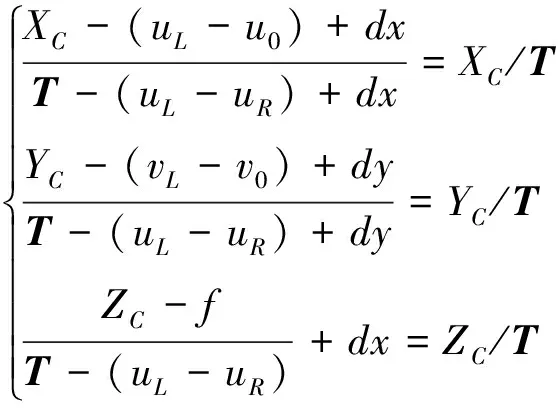
按照设计结果,采用几何知识对特征点P及C1做相机投影点位置关系获取,表示为:
(1)
式中,(u0,v0)表示实际坐标点,焦距则由f定义,d表示视差,(x,y)表示像素位置,T表示平移向量。
获取特征点P坐标系:

(2)
双目立体视觉系统获取成像后与实际图像存在偏差,因此要及时纠正相机位置,令其满足正常的成像要求。
1.2 双目立体视觉相机标定
为了能够更好地实现变电站空间毫米级区域故障三维场域图像的采集,需要标定建立的双目立体视觉模型相机,因而采用二维棋盘格图像校准板对相机视觉进行标定,具体步骤如下:
(1)令棋盘图像属于标定板,将其放置在平面中,并从多个角度对其进行拍摄;
(2)提取图像特征点,取得关键的坐标位置信息;
(3)获取相机内外参数;
(4)优化相机内外部参数,取得全部参数。
按照以上四个步骤,采用MATLAB标定双目立体视觉相机,由于相机有两个摄像头,所以从多种角度拍摄后会获取20幅双图像组,再进行标定。依据标定结果获取双目立体视觉相机的平移向量,定义为:T=[-70.215,1.06498,-0.18542],而相机之间的间距标定为70 mm,平移参数为70.52315 mm,两者相差较小,属于校正后的参数。
最终利用校正后的双目立体视觉模型获取变电站空间毫米级区域故障三维场域图像,实现图像采集。
1.3 变电站空间毫米级区域故障三维场域图像滤波
双目立体视觉模型采集到变电站空间毫米级区域故障三维场域图像后,会将图像成像在探测器中,成像过程中会因为环境光线的影响导致图像遭受噪声污染,影响后续操作。所以为了提升监测效果,采用均值滤波方法对采集的图像开展去噪处理[7-8]。
采用均值滤波方法将采集图像的噪声进行分配,分配位置为图像像素中,达到抑制噪声的目的。
设置图像像素由(p,q)定义,并设定一个以像素作为中心的模板,令模板大小尺寸为5×5,因而模板的设定模式为:
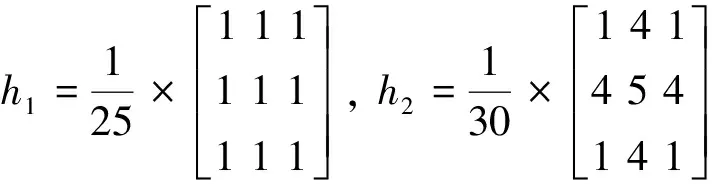
(3)
式中,h定义为模板类型。
采用加权平均方法计算出各个模板的像素灰度值,结合计算结果,对其进行均值滤波,定义如下:

(4)
式中,g(p,q)表示处理后的去噪图像,f(r,c)表示采集的变电站空间区域故障图像,(r,c)表示像素坐标,mn表示尺寸,hpq表示类型。
通过以上操作,实现基于双目立体视觉的变电站空间毫米级区域故障三维场域图像的滤波处理。
2 变电站空间毫米级区域故障三维场域监测
2.1 基于改进Hu不变矩的故障特征向量
根据图像滤波处理结果,消除了图像噪声数据,以此采用改进Hu不变矩提取变电站空间毫米级区域故障三维场域特征[9]。
采用Hu不变矩提取滤波处理后的变电站空间毫米级区域故障三维区域特征,从中取得由7个不变矩提取的故障特征向量,表示为:
I=(φ1,φ2,φ3,φ4,φ5,φ6,φ7)
(5)
式中,φn表述故障特征子向量,I表述故障特征向量。
由于采用传统的Hu不变矩提取变电站空间图像故障特征存有缺陷,为避免这种问题,需要对Hu不变矩进行改进,因而设置缩放比例因子λ的坐标表述为(i′,j′),未加入λ前的坐标系则表示为(i,j),令其满足下述关系:
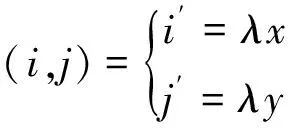
(6)

(j′-j′)q+f′(i,j)
(7)
归一化中心矩,定义为:
(8)

(8)
式中,φ表示不变矩提取的故障特征向量。
把λ引入到Hu矩提取的故障特征向量中,其故障特征向量转换成:
I=(λ2φ1,λ4φ2,λ6φ3,λ6φ4,λ12φ5,λ8φ6,λ12φ7)
(9)
因此基于改进的Hu不变矩提取的变电站空间毫米级区域故障三维场域特征向量表示如下:
I=(I1,I2,I3,I4,I5,I6,I7)=φ1R2(φ2)
R3(φ3)R3(φ4)R6(φ5)R4(φ6)R6(φ7)
(10)
式中,R定义为改进算子,(I1,I2,I3,I4,I5,I6,I7)表示改进Hu矩获取的故障特征向量。
2.2 变电站空间毫米级区域故障三维场域监测
基于改进Hu矩获取的故障特征向量,将故障特征向量数据划分成训练样本及测试样本,并输送到建立的正则化极限学习机中训练,利用该模型监测变电站空间毫米级区域故障三维场域,实现变电站空间毫米级区域故障三维场域的监测。
获取极限学习机ELM数学模型[10]方程表达式:
(11)
式中,x表示故障特征向量输入变量,WL(x)表示故障特征向量输出变量,L表示神经元数量,βi表示系数,ai表示输入权重,bi定义为偏置,其输出函数定义为G(ai,bi,x)。
G(ai,bi,x)也可以定义为:
G(ai,bi,x)=g(ai·x+bi)
(12)
式中,g(·)表述激活函数。


(13)
式中,l表示组数。
转换方程(13),形成矩阵形式,表示为:
(14)
式中,v(xi)表示优化后的输出函数,可以有效提升极限学习机ELM的监测精度,m表示样本集。
将正则化因子κ引入到ELM模型中,形成RELM正规则极限学习机,以此对β求解:

(15)
式中,εl表示训练偏差,MELM表示引入κ后的ELM模型。
优化方程(15),优化结果定义为:
al,j(βj-yl,j+εl,j)
(16)
式中,al,j表示Lagrange乘数,εl,j表示偏置,l表示层数,j定义为单元数量,yl,j表示期望输出值。
根据以上流程,将故障特征训练样本数据用作正则化极限学习机RELM模型的输入、输出,利用该模型对故障特征向量训练样本数据实施训练操作,最终依据输出结果实现变电站空间毫米级区域故障三维场域监测。
3 实例实验与结果分析
为了验证基于双目立体视觉的变电站空间毫米级区域故障三维场域监测方法的整体有效性,需要对该方法开展实验对比测试。
采用基于双目立体视觉的变电站空间毫米级区域故障三维场域监测方法(方法1)、利用Apriori算法实现变电站二次系统故障诊断方法(方法2)和Petri网智能变电站保护控制故障诊断与定位方法研究(方法3)实行对比测试。
(1)针对采集的变电站空间毫米区域故障三维场域图像,设置该图像尺寸大小为256×256×8bit。由于获取的原始图像中存有不同类型及密度的噪声,所以以客观标准衡量变电站空间图像的滤波质量数值指标,其衡量标准通过下述方程定义:
(17)
式中,PSNR表示峰值信噪比,ISNR表示信噪比改善因子,fy(i,j)表示初始图像像素值,o(i,j)表示滤波处理后的图像输出像素值,f(i,j)定义为受污染图像,MSE表示均方误差,i、j表示像素值,M、N定义为图像系数。
根据方程(17)确立结果,采用方法1、方法2和方法3对具有噪声数据的变电站空间图像进行滤波处理,并将处理结果与原始图像对比,从而验证了三种方法的去噪效果,测试结果如图2所示。
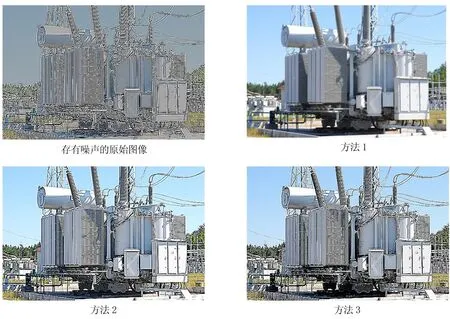
图2 变电站空间图像滤波处理对比测试
由图2可知,由于原始图像中存有大量噪声数据,所以采用三种方法消除噪声数据。经对比发现,方法1对原始图像噪声数据开展滤波处理后,其处理结果明显要优于其余两种方法,其图像清晰度、质量最高,说明方法1的滤波处理结果最好。
而方法2和方法3在处理图像时,可以消除大量噪声数据,图像内还存有少量噪声数据,导致方法2和方法3所处理的图像清晰度较低,所以可知方法1的滤波处理结果最佳,而其余两种方法的滤波处理结果较差。
(2)为了能够更好地对变电站空间毫米级区域故障三维场域监测,本次实验在变电站空间毫米级区域中设置了六种断路器机械故障状态,监测前优先获取变电站空间断路器的能量谱特征值,并对六种故障状态进行划分,前五种状态数据为训练样本,后一种状态数据为测试样本。
设置变电站空间断路器的合闸为1、分闸为3、180 V欠压合闸为2、160 V欠压合闸为5、合闸线圈老化为4、合闸卡滞为6。按照设置结果,采用三种方法对六种故障状态下的变电站空间断路器监测,根据监测结果判断出三种方法是否合理地监测出变电站空间断路器故障,测试结果如图3所示。
由图3可知,在样本数据量逐渐提升的情况下,三种方法的监测精度都有所提高,而在设置的六组故障状态下,方法1的监测效果明显优于其余两种方法。这是因为方法1对变电站空间毫米级区域故障三维区域图像开展了滤波处理,从中消除了环境光线等多种因素对图像造成的噪声污染,以此大大提升了该方法对变电站空间故障监测的监测效率及监测精度。
4 结 论
本文提出了基于双目立体视觉的变电站空间毫米级区域故障三维场域监测方法。该方法利用双目立体视觉采集的变电站空间图像,并对该图像开展预处理,然后提取了变电站故障特征向量数据,最终将特征向量输送到建立的监测模型中训练,获取的图像清晰度、质量最高。对六种故障状态进行检测后,表现出的准确率最高,维持在80%以上,最高接近100%,在滤波处理方面效果较优越,日后在变电站空间毫米级区域故障三维场域监测方法中有着长远的发展前景。
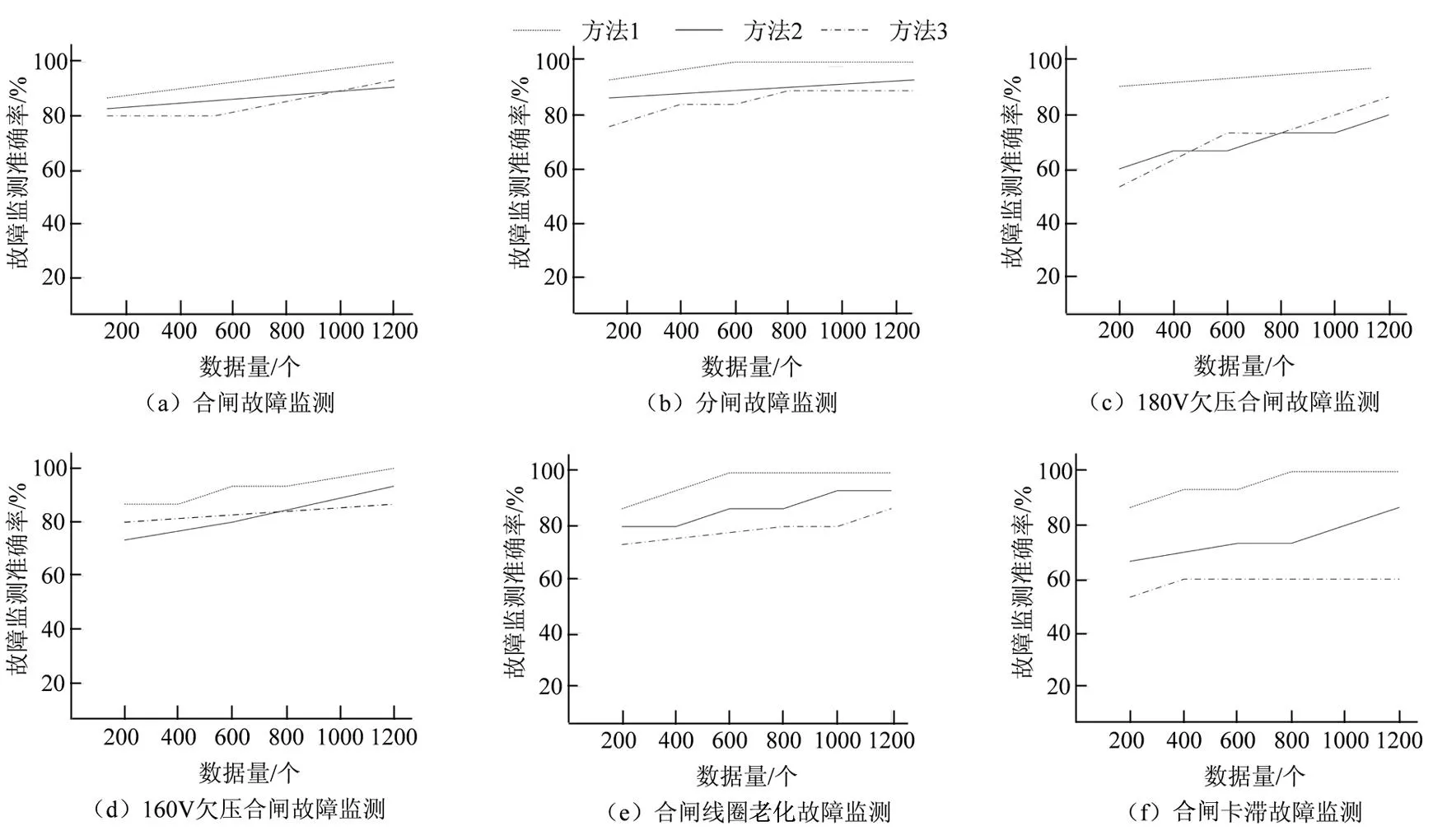
图3 六种故障状态下的变电站空间监测对比测试
