基于改进模糊PI控制的双有源桥DC-DC变换器
2023-12-27陈桃
陈桃
(南京工程学院 电力工程学院,江苏 南京 211167)
随着新能源大量接入直流微电网,为了加大对新能源高效、可靠的利用,直流微电网技术逐渐得到学术界的关注。直流变压器作为直流微电网的电能变换与功率传输的核心装置,目前针对直流变压器的研究较多[1]。由于具有控制简单、可实现电压等级的变换以及功率的双向流通等特点,双有源桥DC-DC变换器(Dual Active Bridge DC-DC Converter, DAB)在分布式发电的微电网系统、航空航天领域、储能系统[2]以及电动汽车行业等得到广泛的应用。因此以DAB变换器为基础单元的直流变压器得到了广泛的认可。
由于直流微电网中直流负载扰动、交流负荷投切过程都会加剧直流母线电压的波动,进而影响直流微电网系统的稳定运行,同时会影响直流负载与DAB变换器的工作效率。因此,抑制直流电网的母线电压的波动成为亟待解决的问题。文献[3]通过DAB变换器的传输功率表达式来推导移相占空比D的表达式,与传统的DAB变换器电压闭环系统相比,引入了负载电流,因此提高了DAB变换器的动态调节时间和负载的动态性能。文献[4]针对文献[3]中没有考虑输入电压脉动的情况,提出了输入电压前馈的方法,抑制了电压脉动的,提高了变换器的动态性能和控制方法的可移植性。文献[5]基于单移相的控制方法,提出了一种输入电压前馈闭环的控制方法,并进行实验验证,表明该方法能提高负载突变时DAB变换器的动态性能。文献[6-8]对比了PID控制与模糊PI控制,在非线性过程和参数扰动下PI控制的响应缓慢且效果较差,同时模糊PI控制器在上升时间和超调量方面的暂态与稳态性能均优于PID控制。
基于上述分析,现有的模糊PI控制器存在动态响应速度缓慢、超调量大的不足之处,在此基础上,以DAB变换器为被控对象,采用改进的模糊PI控制方法进一步提高直流电压的稳态响应速度和动态性能,以解决直流母线电压波动的问题,提高电压质量。
1 直流微电网系统
直流微电网的结构大致可分为单母线结构、双极型母线结构和多母线结构等。直流微电网系统[9]是单母线结构,该系统主要由光伏单元、储能单元[10-11]、负荷和逆变器并网组成,光伏单元和储能单元分别通过boost变换器和DAB变换器接入公共直流母线。其中光伏单元采用的是增量电导法[12-13],并网逆变器采用的是虚拟同步电机控制方法(Virtual Synchronous Generator , VSG)[14-15]。具体结构图如图1所示。

图1 单母线直流微电网的拓扑结构
2 DAB变换器的工作原理
DAB直流变换器的拓扑结构[16]如图2所示。其中:隔离变压器的变比为1∶n;电源侧(蓄电池)的输入电压和输出电压分别是U1、U2;电源侧和负载侧的电容分别是C1、C2;低压侧H桥(Low Voltage Bridge, LVB)和高压侧H桥(High Voltage Bridge, HVB)的电压分别是uH1、uH2。
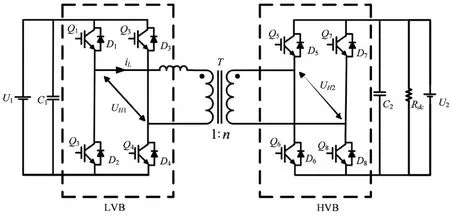
图2 DAB变换器拓扑结构
图3为传统单移相控制(Single Phase Shift, SPS)稳态时的主要波形。
其中Q1-Q8为8个对应开关管的控制信号,D为两个H桥之间的移相占空比。为了简化分析,不妨假设0≤D≤1且U1>1/nU2,以此来分析DAB变换器的工作状态。
1)状态1:t0-t1时间段
电感电流iL的表达式为
(1)
2)状态2:t1-t2时间段
电感电流iL表达式为
(2)
3)状态3:t2-t3时间段
此时电感电流iL表达式如下
(3)
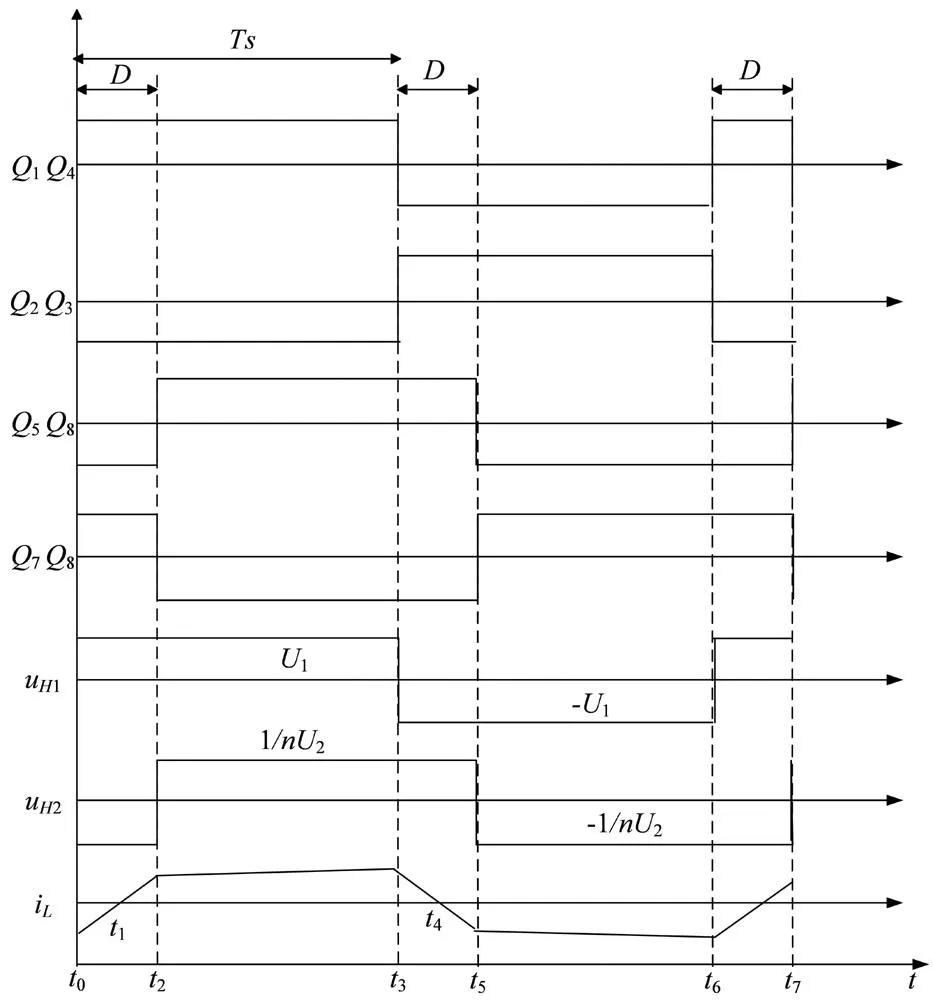
图3 SPS控制DAB变换器的波形图
3 基于模糊PI的单移相控制
3.1 改进模糊PI的单移相控制原理
模糊PI控制结构主要由直流母线电压采样环节、模糊逻辑控制器和PI环节组成,其闭环系统结构如图4所示。
在模糊PI控制的基础上,改进模糊PI控制的原理为在误差与模糊控制器的输入之间添加预处理的环节,控制原理图如图5所示。
图5中,设置这个“软”自动切换开关,通过直流母线电压误差与设定的阈值δ进行比较。当e>δ时,说明此时的误差值偏大,切换到开关1上,即经过微分环节后,超调量显著减小,再进入模糊控制器中,提高系统跟踪的速度性;当e<δ时,说明此时误差较小,切到开关2上的积分环节来减小系统的静态误差,提高系统跟踪稳定性和精度。阈值δ通过仿真反复试验整定可得。
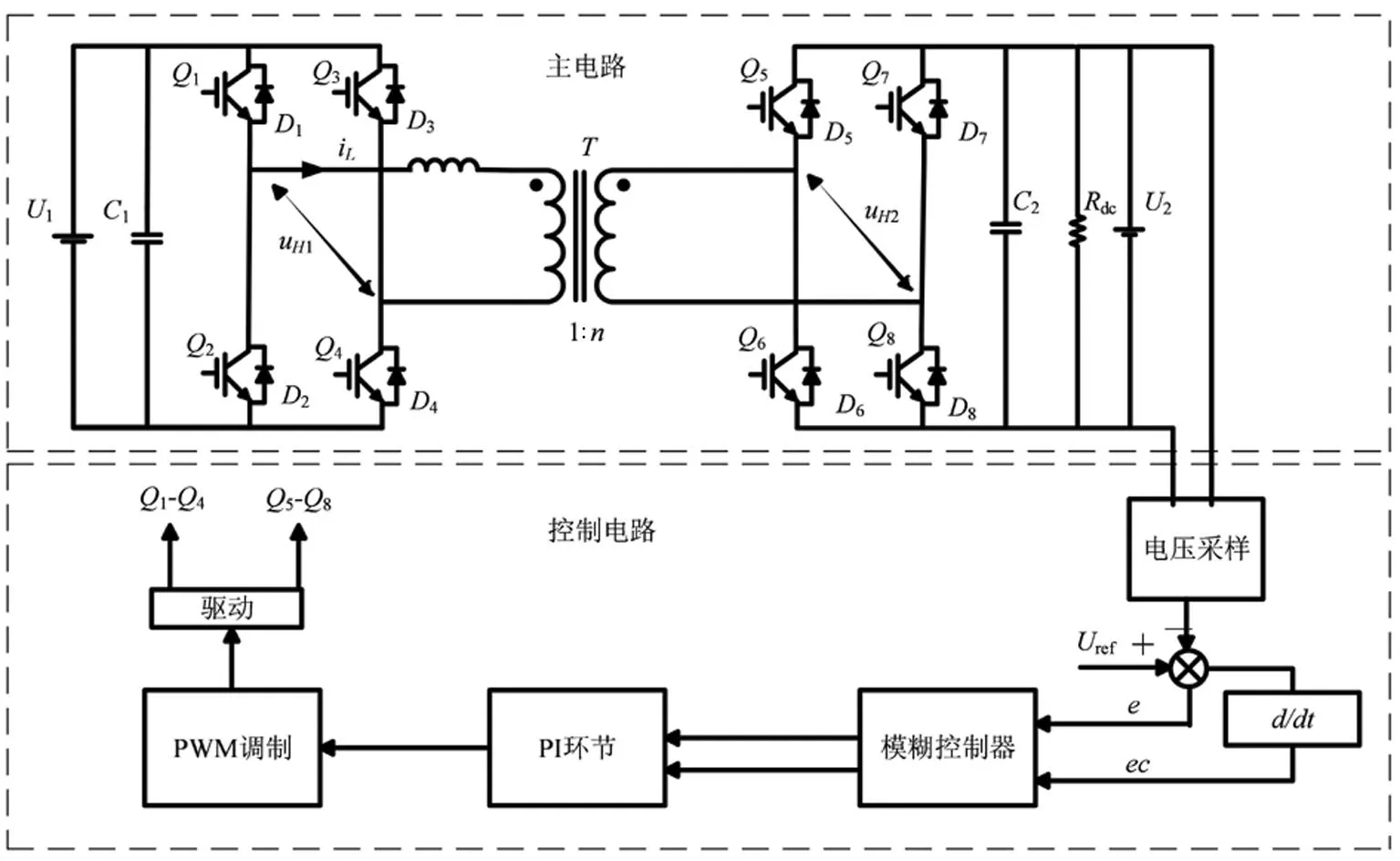
图4 模糊PI控制原理图

图5 改进后的模糊PI控制原理图
3.2 改进模糊PI控制器参数设计
模糊PI控制器的输入变量为DAB变换器输出电压偏差以及偏差的变化率,输出变量是PI控制器的修正量ΔKp、ΔKi,因此PI控制器的参数Kp和Ki的整定公式如下:
(4)
其中Kp0、Ki0是PI控制器参数的初始值,Kp、Ki是PI控制器整定后的参数。
隶属度函数的选择对系统的控制性能至关重要。在模糊PI控制中的输入和输出变量的模糊集NB、NM、NS、ZO、PB、PM、PS的隶属度函数均选择分辨率比较高的trimf类型,当系统的误差比较大的时候,显然不合理。
因此,在改进的模糊PI控制中,隶属度函数选取作如下调整:当系统的误差比较小的时候,隶属度函数选择分辨率高的trimf类型;当系统的误差比较大的时候,应选取分辨率比较低的smf和zmf类型的隶属度函数。所以,改进后的模糊PI控制的输入输出变量的模糊集NB、NM、NS、ZO、PB、PM、PS所对应的隶属度函数类型分别为zmf、trimf、trimf、trimf、trimf、trimf、smf。
模糊PI和改进模糊PI控制的各变量隶属度函数对比如图6所示。

图6 模糊PI和改进模糊PI控制的变量隶属函数对比
输入与输出量之间的逻辑关系决定了模糊规则表的制定。当变换器的输出值低于给定值时,占空比上调,使得输出值能快速达到给定值;当输出值与给定值近似相等时,占空比保持不变;当输出值高于给定值时,占空比下调。由此模糊规则采用如下规则形式
ife=NBandec=PBthen ΔKp=
ZOand ΔKi=ZO
(5)
此时说明反馈的电压远高于给定的电压,误差较大,但是由于误差的变化率在快速减小,因此模糊控制器不需要调整PI的参数,即ΔKp和ΔKi均为0。基于以上逻辑分析,建立模糊PI规则控制表如表1所示。考虑到模糊PI控制的部分隶属度函数选取不合理,导致模糊规则表的某些规则设计得不合理,并对这些不合理的规则进行分析、修正,形成改进后的模糊PI规则表如表2所示。
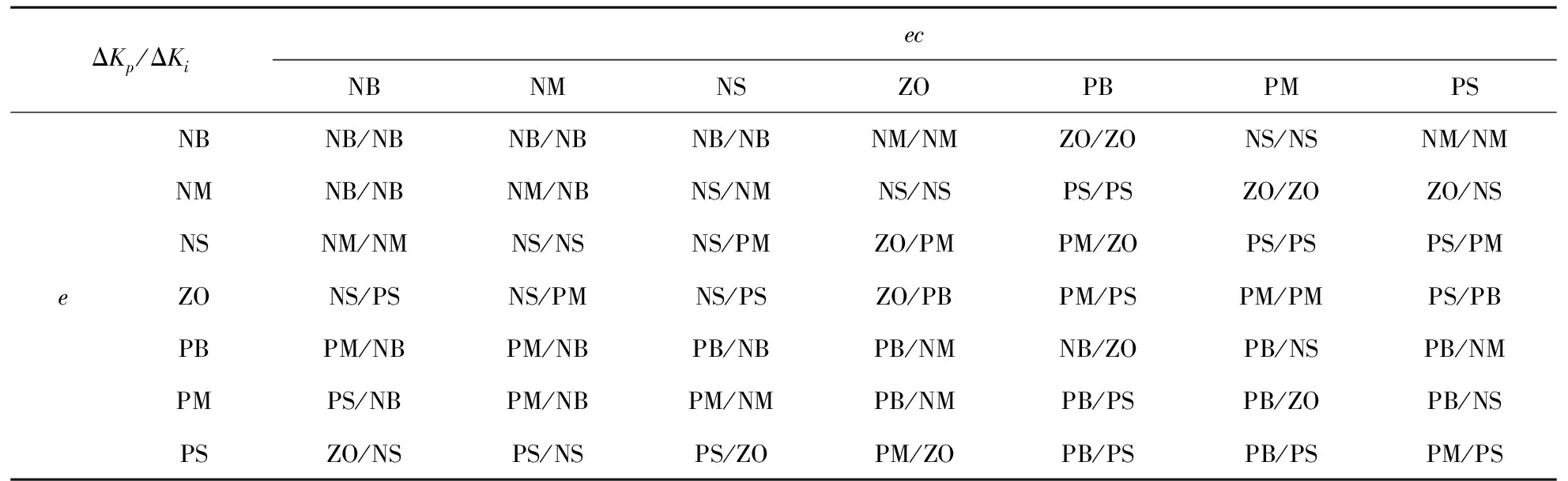
表1 模糊PI控制规则表

表2 改进后的模糊PI控制规则表
由上述模糊PI控制规则表和改进模糊PI控制规则表选取两个典型的场合分析如下:
当e和ec均为PB时,表明系统的误差和误差率都很大,同时e(t)·ec(t)>0,随着时间的积累,|e(t)|越来越大,直至发散。因此开关切换到1位置,即经过微分环节,通过增大ΔKp的值,使系统的误差快速降低,减小超调量。此时,改进的模糊控制应该输出一个正大的ΔKp的值,而模糊PI规则表中对应的e和ec均为PB时,输出的ΔKp的值是NB(负大),显然是不合理的。
当e和ec均为PS时,表明系统的误差和误差率很小,同时e(t)·ec(t)>0,系统是收敛的,|e(t)|会越来越小,因此开关切换到2位置,通过增大ΔKi的值,使系统的稳态误差减小。此时,改进的模糊控制应该输出一个正大的ΔKi的值,而模糊PI规则表对应的e和ec均为PS时,输出的ΔKi的值是PS(正小),也是不合理的。
模糊PI控制与改进的模糊PI控制输出量ΔKi曲面图对比如图7所示。

(a)模糊PI控制ΔKi曲面图

(b)改进后的模糊PI控制ΔKi曲面图
4 仿真验证与分析
为了验证提出的改进模糊PI控制的正确性和有效性,以DAB直流变换器作为被控对象,在Simulink中搭建仿真模型,设置3种不同的工况进行仿真验证。仿真模型包括分布式能源光伏、储能蓄电池和隔离环节DAB,其中DAB高压侧接入有效值600 V的交流主电网。仿真参数设置如表3所示:

表3 仿真参数
4.1 工况1:直流负载突变
根据微电网负荷有功功率P为25 kW,母线电压U2为600V,可知直流负载R大小为14.4 Ω。为了模拟直流负载突变对直流母线电压的影响,在0.5 s时并联一个14.4 Ω的直流负载模拟突变。直流母线电压的变化如图8所示。
其中,PI控制参数:Kp=100、Ki=5;模糊PI控制参数初始值:Kp0=1.5、Ki0=4。
从图8中可以看出,虽然三种控制方法都能够对电压指令的精确跟踪,但跟踪的速度与抗干扰的能立有很大的差别。PI控制、模糊PI控制分别出现了6%和3%的超调量,而改进后的模糊PI控制没有超调量。另外,三种控制方法下母线电压到达稳态的时间也截然不同,改进模糊控制下系统在0.015 s处达到稳态,而PI控制和模糊PI控制则分别在0.05s和0.022 s开始进入稳态。在0.5 s处施加干扰后,从图8的局部放大可看出,三种控制方案下,母线电压均出现不同程度的波动,其中改进模糊PI控制的波动情况明显小于另外两种控制,抗干扰性能比较良好。相比于其余两种控制策略,改进模糊PI控制响应速度更快、跟踪精度高。

图8 三种控制方式下的直流负载突变过程仿真波形
4.2 工况2:交流负载投切
为了模拟交流负载投切的过程,三相断路器设置在0.3 s时将交流负载切除。从并网电流波形中看出,三相电流在0.3 s时发生波动,从原来的45A附近波动到81A左右,随后又恢复到稳定状态运行。同时,图9(d)中频率在0.3 s时也随之发生波动,在0.4 s左右恢复到工频50 Hz。通过图9(e)和(f)可知,交流负载的投切对并网有功功率P和无功功率Q的影响很小,在网侧有功功率为25 kW,无功功率为0的时候,满足基本的并网运行条件。
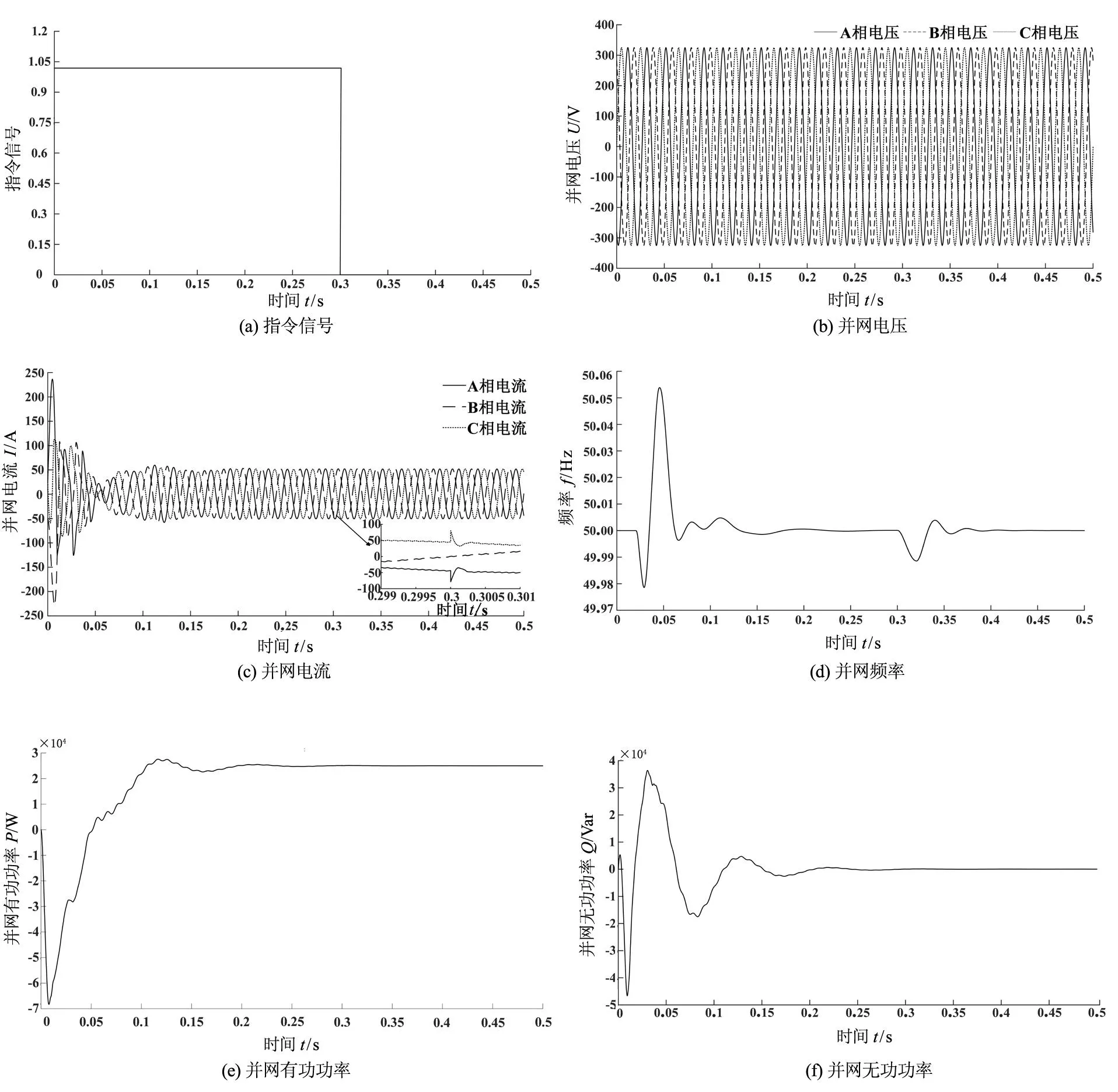
图9 交流负载投切过程仿真波形
4.3 工况3:负荷突变
为了避免运行效果的干扰,假设环境温度T=25℃,光照强度S=1000 W/m2的条件不变,此时光伏输出恒定的功率为90 kW左右,在0.3 s时,设置微电网负荷由原来的90 kW增大为95 kW。从图10(b)中可以看出,0.3 s时蓄电池通过DAB变换器迅速放出由负荷突增造成的5 kW的功率缺额,因此,图10(d)中蓄电池SOC在逐渐降低。图10(c)中,当负荷发生突变时,直流微电网的频率几乎不发生波动,稳定维持在工频50 Hz,满足并网运行的条件。
从直流微电网发生负荷突变时,蓄电池能快速输出功率,抑制了由于微电网负荷突变引起的频率波动;从而有效减小了直流微电网功率波动对并网运行的影响。

图10 微电网负荷突变仿真波形
5 结 论
基于DAB在直流微电网中的应用,分析了改进模糊PI控制相比于模糊PI控制和PI控制的优点,采取了改进模糊PI控制的策略,并进行仿真验证。从控制参数方面改进模糊PI控制结合了模糊PI和PI控制的优势,对Kp、Ki的参数实时修正和整定,解决了PI控制参数固定不变的问题。相比于其余两种控制策略,改进模糊PI控制响应速度更快,跟踪精度高,同时对外界的抗干扰能力更强。
