混合动力控制策略解析及模型化开发
2023-12-26唐香蕉林继龙
唐香蕉,杨 天,赵 坤,林继龙
(1.上汽通用五菱汽车股份有限公司,广西 柳州 545007;2.中国汽车技术研究中心有限公司,天津 300300)
1 引言
随着国家政策对混合动力汽车政策的不断扶持以及混合动力车型具备的多种优势[1-3],国内各大主机厂纷纷投入到混合动力汽车的研发设计生产中。目前对于混动车型控制策略的研究主要有:逻辑阈值控制策略[4-6]、基于优化算法的控制策略[7-8]以及基于模糊规则的控制策略[9],然而后者相较于逻辑阈值整车控制策略来讲设计较为复杂,前者在工程应用方面更为广泛,技术方面更为成熟,开发过程也更为简单。而对于没有开发经验的团队来说,参考对标国内外主机厂混动开发经验,可以减少不必要的时间人力财力投入,因此竞品车模型化开发的作用逐渐凸显出来。其优势不仅在于整车关键控制策略的参考价值,还可以通过修改仿真模型中部件参数或者关键控制参数,研究分析这些参数对整车动力经济性的影响,从而为新车的开发提供了方向。结合了先进的对标技术、系统的试验方案及高精度的仿真技术开发,将实验数据及整车控制策略进行固化,为主机厂新技术路线的预研工作提供了一套系统的方案,便于主机厂高效地选择动力总成及整车匹配设计,研究分析整车动力经济性,减少试验成本、节约整车开发周期。
模型化的开发流程首先是通过大量试验解析出整车关键控制策略及动力系统部件性能,然后以此为基础搭建整车控制策略模型,通过不断完善动力系统部件参数、试验数据以及能量管理等控制策略,提高整车仿真模型精度。
2 研究方法
针对控制策略的研究,以国外某P2架构PHEV 车型为研究对象,先进行总线解析及CAN 协议破解、整车控制策略解析试验、发动机等系统部件试验,然后搭建整车控制策略模型,通过试验数据和仿真参数的修改不断提高整车模型精度,进而实现竞品车模型化开发。
2.1 总线解析及CAN协议破解
CAN信号解析主要通过以下三种方法。
(1)根据车辆使用说明及维修手册,增加传感器,将得到的实测信号与CAN信号对比,来进行部分简单信号的破解,比如温度信号、转速信号等。
(2)通过人为设置特性工况,通过单一变量控制法,来破解相应的信号,比如加速、制动踏板开度信号等。
(3)根据厂商提供的车载诊断仪进行信号的扫描、记录与分析,通过车载诊断仪与电脑的联机工作进而记录车辆相关控制器的信息。
2.2 对标测试系统
整车控制策略对标测试系统主要包括两驱底盘测功机、数据记录系统、德维创数采系统、油耗仪等,所需主要设备,如表1所示。

表1 对标测试与解析所需设备Tab.1 Equipment for Test and Analysis
CANoe、车载诊断仪主要用来采集动力总成相关CAN信号,用于CAN信号破解及后期对数据的处理及策略解析。
油耗仪接在低压油管端,通过调整发动机的工作点,测试发动机在不同转速、转矩下的耗油量,进而得到发动机燃油消耗率和外特性曲线,如图1左侧所示。

图1 油耗仪及德维创数采系统Fig.1 Fuel Consumption Detector and Dewetron Data Acquisition System
德维创数采系统主要采集传感器接收到的整车数据,包括电压、电流、温度、转矩等信号数据。整车增加的传感器主要有:在电池包、电机、DCDC等部件安装电流钳;在发动机、电机、电池冷却系统安装温度传感器;在发动机飞轮端、车轮安装转矩传感器等,如图1右侧所示。
2.3 控制策略解析试验方案
把车辆固定在两驱底盘测功机上,设置好滑行阻力系数,开始进行对标测试。通过在不同驾驶模式、高低SOC 工况下的NEDC 循环试验、充放电试验、加速试验、不同加速踏板开度试验,解析出整车Pedal Map曲线、模式切换策略、能量管理策略、换挡策略、发动机电机工作点等。具体试验方案,如表2所示。

表2 控制策略解析试验方案Tab.2 Test Scheme of Control Strategy Analysis
3 动力系统关键控制策略解析
文中P2动力系统架构,包括发动机,离合器,电机,自动变速器和输出轴,如图2所示。
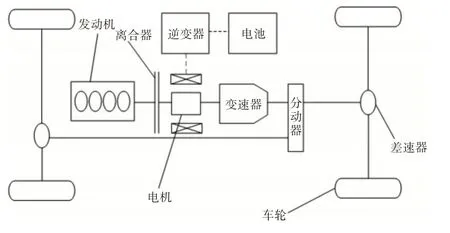
图2 车辆动力系统架构图Fig.2 Structure of the PHEV Power System
整车动力系统控制策略,是指车辆在驱动状态下从驾驶员对车辆的输入到车辆最终输出的控制过程,具体策略架构解析过程,如图3所示。

图3 控制策略架构图Fig.3 Structure of Control Strategy
3.1 需求输出解析—整车Pedal Map
该车具有三种能量管理模式,分别是Max eDrive、Auto eDrive和SAVE,三种驾驶模式,分别是ECO、Comfort、SPORT。整车需求输出与能量管理模式关系不大,与驾驶模式相关。通过大量定踏板转毂试验,得到了不同驾驶模式ECO、COMFORT、SPORT模式下驱动力随车速和加速踏板开度的变化规律,在Auto COMFORT模式下驱动力的变化情况,如图4所示。
3.2 模式切换策略解析
通过实验及分析解析了车辆在三种能量管理模式和三种驾驶模式下的工作模式切换规律。本车具有两种工作模式,电动模式和混动模式。电动模式下,离合器断开,由电动机单独驱动车辆行驶;混动模式下,离合器闭合,由发动机或发动机、电动机共同驱动车辆。模式进出条件与能量管理模式、驾驶模式、车速、SOC、驱动力等因素相关。
当整车处于Auto eDrive能量管理模式下,切换至SPORT模式时,发动机一直处于启动状态,车辆以混动模式为主。切换至ECO/Comfort模式时,工作模式切换与驱动力和车速为切换条件,且在主要由车载蓄电池供能的电量消耗(Charge Depletion,CD)阶段以及主要由发动机供能的电量维持(Charge Sustaining,CS)阶段的驱动力、车速切换值并不相等,如图5、图6所示。

图5 CD阶段工作模式切换条件(Auto+ECO/Comfort模式)Fig.5 CD Stage Mode Switching Conditions(Auto+ECO/Comfort Mode)
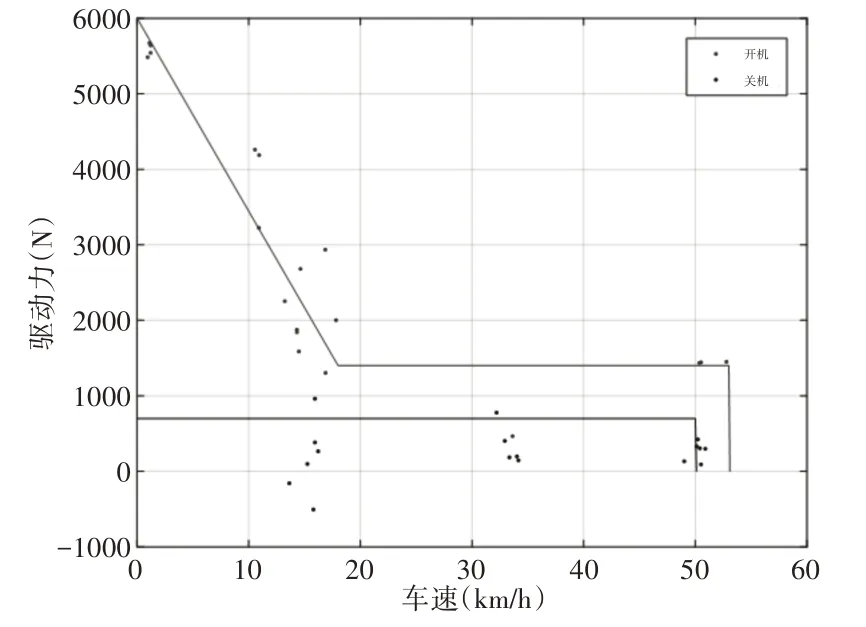
图6 CS阶段工作模式切换条件(Auto+ECO/Comfort模式)Fig.6 CS Stage Mode Switching Conditions(Auto+ECO/Comfort Mode)
由图5可知,当车速低于70km/h时,由纯电进入混动模式与驱动力和车速相关;当车速高于70km/h时,车辆直接进入混动模式。
由图6可知,在18km/h以下时开机条件与车速和驱动力均有关,随车速上升,进入混动模式的驱动力条件下降;18km/h以上驱动力条件不再变化,直至最高切换车速约53km/h。混动模式向电动模式的切换条件为驱动力小于700N且车速小于50km/h。当整车处于Max eDrive能量管理模式下,无论切换至ECO/Comfort/SPORT 哪种模式下,整车都以纯电模式行驶,当SOC 小于35%时,进入SAVE模式,发动机启动,为电池充电。当整车处于SAVE能量管理模式下,切换至ECO/SPORT模式下,车辆行驶即可进入混动模式;切换至Comfort模式下,模式切换以车速、驱动力条件为主,与Auto Comfort模式中车速、驱动力切换值一致。
3.3 档位切换模式解析
变速器具有8个档位,且在纯电动模式和混动模式具有不同的升降档策略,通过实验分别解析出不同模式下的升降档曲线,如图7~图10所示。

图7 电动模式升档曲线Fig.7 Upshift Curves of Electric Mode

图8 混动模式升档曲线Fig.8 Upshift Curves of Hybrid Mode
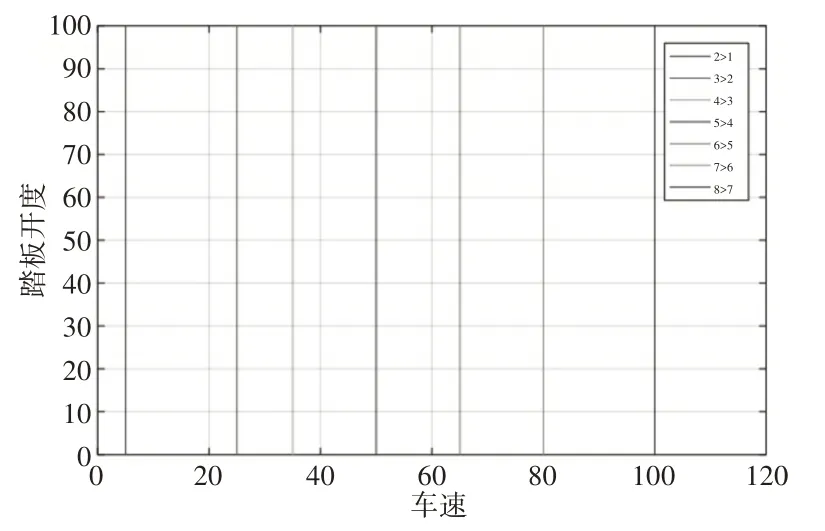
图9 电动模式降档曲线Fig.9 Downshift Curves of Electric Mode
图10 混动模式降档曲线Fig.10 Downshift Curves of Hybrid Mode
换挡过程基本上分为5个阶段,以电动模式为例分别是以下5个阶段:
开始阶段,需求挡位信号变化,其他部件按原挡位工作;
准备阶段,保持挡位不变,电机转矩上升;
分离阶段,挡位开始分离,同时电机转矩下降;
同步阶段,电机转矩保持在较低位置,电机转速逐渐向下一挡位同步;
结束阶段,同步基本完成,电机转矩恢复。
整个过程约耗时1.5s,该换挡过程与传统自动变速箱车辆基本一致。
混动模式换挡阶段类似于纯电动模式,其中发动机转矩保持不变,只是用电机进行转矩调节,整个过程离合器保持结合状态,不参与换挡。
3.4 能量管理策略
车辆具有三种能量管理模式,Max eDrive能量管理模式下以纯电行驶,电机提供能量来源。车辆在混动模式下,有功率跟随和发电两种能量分配策略。AutoeDrive和SAVE两种能量管理模式下均存在这两种能量管理策略,SOC 较高时使用功率跟随策略,SOC较低时使用发电策略。功率跟随策略下发动机功率和驱动功率基本一致,电机不参与驱动,基本上不消耗电量,可以维持SOC基本不变。发电策略下,发动机驱动功率大于驱动功率,多余功率用于发电。发动机稳态工作时,发电功率约为15kW;发动机非稳态工作时,电机将与发动机进行协调工作,补充或吸收发动机的动力。
4 整车Simulink建模及仿真
4.1 整车动力系统参数搜集
搭建模型时需要整车、发动机、电机、电池、变速器等部件的参数信息,需要通过试验等手段进行提取。
4.2 关键零部件测试及数据提取
试验中通过把油耗仪接在低压油管端,调节油门踏板开度调节发动机的工作点,测试发动机在不同转速、转矩下的耗油量,进而得到发动机燃油消耗率和外特性曲线,发动机主要参数,如表3所示。同时利用油耗仪,读出了发动机不同工作点的喷油量,如图11所示。

图11 喷油量数据Fig.11 Quantity of Fuel Injection
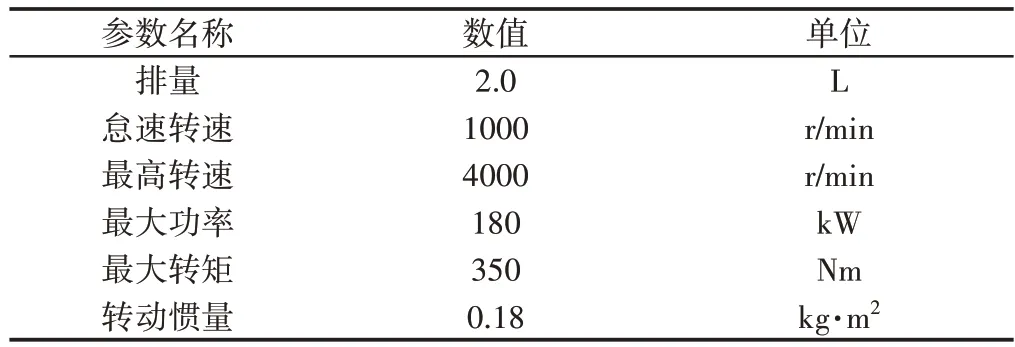
表3 发动机参数Tab.3 Engine Parameters
根据喷油量计算燃油消耗率,并绘制等高线图后可知中转速、中高转矩区域发动机燃油消耗率较低,如图12所示。

图12 燃油消耗率及外特性曲线Fig.12 Fuel Consumption Rate and Engine Performance Curves
从图12可以看出,发动机高效区主要集中在2000rpm附近,发动机在此区域工作可以得到较好的经济性,与实验数据中得到的发动机主要工作点保持一致。基于以上发动机参数及性能,搭建了发动机模型,如图13所示。

图13 发动机模型Fig.13 Engine Model
上半部分计算发动机在不同的油门开度下的输出转矩,并根据转矩的增减选择不同的响应特性。下半部分通过查表计算出发动机瞬时油耗和累计油耗。其中查表数据来源于上文测得的发动机外特性及MAP数据。
4.3 控制策略模型
仿真控制策略模型旨在建立实车的纵向动力学模型,尽可能模拟实车,以方便进行更深入的研究。
车辆整体控制思路如下:信号输入控制器后经过处理,用来估计车辆当前状态下的工作目标和工作能力,主要包括各动力源的最大转矩、驾驶员需求驱动力、充电功率等。然后根据解析出的车辆模式切换规则判断车辆应该工作在何种模式,并在条件允许的情况下切换到该种模式。
4.3.1 主控制模型
在Simulink中建立整车控制策略,包括数据输入模型、输入信号处理模型、主控制模型、信号输出。
4.3.2 模式选择模型
模式选择模型包括模式状态模型和模式转换模型。
(1)模式状态模型
根据估计模型得到的整车和动力源工作状态计算适合的模式,其中包括状态估计和状态仲裁模型。状态估计模型中包括车辆状态、电池状态和发动机状态。该模型主要判断各变量与相应的临界值的关系,并产生相应的标志位。状态仲裁模型对状态估计模型产生的标志位的组合进行判断,并决定切换到何种模式,发出相应的切换信号。
(2)模式转换模型
让车辆进入相应的模式并执行状态切换有关动作,输入模式切换信号,输出模式和已经切换好的模式的标志位。收到驱动/制动切换信号时会切换到相应的驱动/制动模式,驱动模式下再根据纯电动/混合驱动的切换标志位切换到相应驱动模式。
4.3.3 档位切换模型
此模型根据解析出的换挡策略在不同工作模式下分别设置换挡策略。
4.3.4 能量管理模型
能量管理模型获得车辆状态后,根据模式和需求对各动力源进行控制。车辆工作模式主要分为纯电动(EV)模式、混合驱动(HV)模式。
(1)纯电动(EV)模式
EV模式下以电机响应驾驶员全部需求,发动机不启动,制动转矩为0。
(2)混合驱动(HV)模式
混合驱动模式下ChargeON信号决定了转矩分配策略。如果使用功率跟随策略,发动机只需满足驱动功率需求;如使用充电策略,发动机需满足驱动和发电的全部功率需求。由总需求功率结合当前发动机转速确定发动机目标转矩,然后由电机填补发动机实际转矩与驾驶员目标转矩之间的差值。
5 模型仿真结果与整车实际结果对比
经济性仿真选择CS阶段NEDC循环工况,仿真目的是通过比较仿真模型在与实车相同的工况条件下的各参数历程,包括各动力源工作点历程,SOC值、综合油耗值等的差异大小来验证模型及所解析的整车控制策略的正确性。以Auto eDrive+Comfort模式为例,选取CS阶段初始SOC为34.2%的NEDC循环工况,同时以相同工况进行仿真,得到车速、SOC、电机发动机转速,对比仿真结果和实验结果,如图所示:车速基本一致,SOC值仿真结果和实验实际结果相差不大,SOC实时误差最大相差不大于1%,电机转速、发动机转速仿真值和实验实际值基本吻合,具体结果,如图14~图17所示。
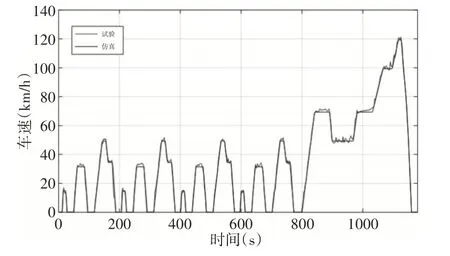
图14 车速变化曲线Fig.14 Velocity Change Curves

图15 电池SOC变化曲线Fig.15 SOC Curves of Battery
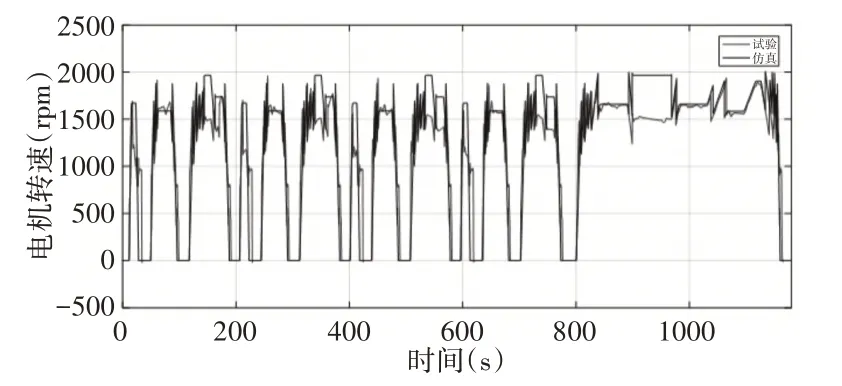
图16 电机转速变化曲线Fig.16 Speed Curves of Motor

图17 发动机转速变化曲线Fig.17 Engine Speed Curves
NEDC循环试验前后SOC基本平衡,仿真得到的燃油消耗量为7.85L/100km。实车实际综合油耗为3.9L/100km,纯电动续驶里程为27km,可由下式计算[10]:
式中:C—综合燃油消耗量;c1—条件A试验所得燃油消耗量,等于0;c2—条件B试验所得燃油消耗量,即所求值;De—纯电续驶里程,等于27km;Dav—25km(假设的储能装置两次充电之间的平均行驶里程)。
计算该车电量平衡状态下的油耗c2=8.1L/100km,仿真与试验误差为3.1%,满足精度要求。
6 结论
(1)以P2架构混动汽车为目标,通过一系列基于数据采集系统的对标解析试验开发出了整车动力系统各部分的控制策略模型;
(2)基于MATLAB/Simulink仿真平台搭建了整车动力系统的被控对象模型,以便用于仿真实验对控制策略模型进行调校验证;
(3)最后进行了仿真及实车实验,结果表明在相同工况条件下,仿真得到的车速变化量最大误差不超过5%、SOC变化量最大误差不超过1%、综合油耗误差为3.1%,电机转速转矩、发动机转速转矩与实际值基本一致,验证了整车动力系统对标策略及模型正确性。
通过以上所述实现了竞品车模型化开发的目标,为P2架构插电式混合动力汽车的开发提供了一定的研究参考,对模型参数进行适当的调整后也可用于新的动力系统控制策略的开发,缩短研发周期,节省企业成本。