二连杆柔性关节机械臂轨迹跟踪控制方法
2023-12-26郭新兰姚利娜
郭新兰,姚利娜
(1.南京交通职业技术学院轨道交通学院,江苏 南京 211188;2.郑州大学电气工程学院,河南 郑州 450001)
1 引言
近年来,随着高新技术的发展,机械臂已被广泛应用于机械化工等行业,其因可代替人力进行抓取、搬运等高强度工作而受到广泛关注。早期关于机械臂的控制方法大多是以其部件均为刚性构件为前提开展研究的。传统控制方法以刚体动力学作为基本理论对机械臂进行控制,但是由于构件会发生一定的弹性变形,其在一定程度上影响其控制精度,所以其控制效果并不佳。该种方法经过多年的发展也已无法满足现代企业对机械臂控制高精度、高速的要求。因此,研究柔性关节机械臂控制方法具有重要意义。
现代关于柔性关节机械臂的控制常常因为阶跃响应时间过长,导致其控制精度较低,进而出现轨迹偏差,需对其进行及时调整,才可保证其安全完成相关任务。对于该类机械臂轨迹的调整问题,相关学者给出了不同的解决方案。如文献[2]中为提升机械臂轨迹控制精度,提出了基于自适应滑动模式干扰观测器的复合轨迹跟踪控制方法。该方法为实现轨迹控制的主动干扰抑制,设计了一种自适应滑模扰动观测器,然后结合非奇异终端滑模控制和规定性能控制方法,设计了一种复合轨迹跟踪控制器,最后利用实验证明所提方法的先进性。该方法虽可在一定程度上提升轨迹跟踪控制精度,但其应用效果仍未达预期,存在较大上升空间,无法大范围应用。文献[3]中针对现有缆索驱动机器人运动精度不足的问题,提出了一种融合视觉和关节运动传感器设计了一种电缆驱动机器人的尖端轨迹跟踪控制方法。该方法先根据电缆的集中质量模型完成电缆驱动机器人动力学模型的获取,然后将大量感知数据融入到控制律中,使其满足稳定控制的条件,最后利用实验证明所提方法的实用性。该方法使得机器人的运动精度得到提高,但其存在响应时间过长的问题。文献[4]提出了一种弹性关节空间机械臂级联智能滑模控制方法。该方法先依据级联系统理论及第二类拉格朗日方法,推导出了系统级联动力学模型,然后设计了一种内外环自适应滑模回归小波神经网络控制方法对动力学模型中的两个子系统进行控制,进而实现对机械臂的控制。该方法在应用过程中由于计算量较大,计算复杂程度较高,故其运算效率过低,导致阶跃响应时间较长,无法对其进行有效控制。文献[5]提出了一种基于三角函数的机器人手臂轨迹跟踪控制重力补偿算法。该方法先对机械臂的几何特性和力矩平衡原理进行分析,然后利用三角函数获取机械臂的重力力矩,最后利用控制器补偿重力,对机械臂的运动轨迹进行控制。该方法在应用过程中,存在机械臂误差角度预测精度不高,机械臂调整角度不到位的问题,无法大范围应用。文献[6]中针对多关节机械臂提出了一种高阶滑模神经网络自适应控制方法。该方法先对机械臂的动力学进行研究,设置了滑移面,然后采用齐次连续控制项针对机械臂运动控制系统中的外部干扰进行补偿,采用RBF神经网络对控制系统存在的不确定性进行逼近,最后利用实验证明该方法的实用性。应用该方法后,机械臂抖振行为得到减少,控制效果也得到增强,但该方法在长时间应用时同样存在阶跃响应时间较长导致轨迹控制效果较差的问题。
针对上述方法存在的不足,为提高柔性关节机械臂轨迹跟踪控制精度和控制效率,本次研究提出并设计了一种二连杆柔性关节机械臂轨迹跟踪控制方法设计。希望通过本次研究,缩短机械臂轨迹跟踪控制的阶跃响应时间,提升其控制精度,为机械臂的安全合理应用提供有效帮助。
2 柔性关节机械臂轨迹调整设计
2.1 阶跃响应时间过长原因分析
在机械臂运动的过程中,其实际轨迹会与期望轨迹存在一定误差,因此,需要对其误差进行实时检测,并不断调整其机械臂,使其按照预设轨迹运动。本次选择二连杆柔性关节机械臂进行研究,其机械结构图,如图1所示。

图1 二连杆柔性关节机械臂结构Fig.1 Two Link Flexible Joint Manipulator Structure
如图1所示,机械臂包含两个连杆、两个机械臂关节。在机械臂运动过程,机械臂连杆和关节会同时移动,其中连杆会随着关节的移动而动,因此,机械臂中关节是最主要部件,其移动轨迹将直接影响着该机械臂是否成功执行任务[6]。机械臂系统一般由执行、评估调节和关节调节组成。执行部分由臂节和连杆组成。驱动根据动力源形式的不同,分为液压、气动、电动、机械驱动四大类,大多数控制策略采用步进电机和伺服电机控制方式[7]。机械臂的轨迹调整结构,如图2所示。

图2 柔性关节机械臂轨迹控制层次结构Fig.2 Hierarchical Structure of Trajectory Control for Flexible Joint Manipulators
由图2可知,搭建的柔性关节机械臂轨迹控制结构包括用户层、评价监管层、联合监管层和轨迹监控层。用户层用于实现机械臂的预期轨迹设计。评价调节层根据机械臂的逆运动模型和用户层的输入值完成运动轨迹的调整,使其具有预测机械臂碰撞情况的功能。轨迹控制层通过评估调节层和轨迹监测层实现机械臂轨迹的调整。机械臂轨迹监测层起到反馈作用,为控制层的评估提供机械臂当前的轨迹状态数据[8]。关节控制层的调整问题,是阶跃控制时间的主要问题,一旦相关层级配合过程不流畅,会造成控制阶跃时间过长,进而影响其机械臂的轨迹控制精度。
2.2 柔性关节机械臂轨迹控制
2.2.1 轨迹控制框架
以原有二连杆柔性机械臂控制器硬件结构为基础,完成其控制方法的设计。本次研究设计的机械臂轨迹调整方法中包括四个硬件模块的驱动程序和一个神经网络调整算法。初始化核心控制器硬件板,输入相应的机械臂轨迹坐标,利用收集到的关节轨迹信息组成一个数据集[9],将其作为径向基神经网络的输入值;核心控制器根据径向基神经网络输出值判断其是否需要进行调整,得到关节调整的输出结果。
2.2.2 机械臂轨迹控制算法
径向基神经网络虽然单个神经元的结构极其简单,功能有限,但由于其具有快速的非线性学习能力和强大的计算能力,可快速逼近未知变量的非线性控制器模型,并能自动生成模糊规则和调整隶属函数,故本次研究基于径向基神经网络完成机械臂轨迹控制算法的设计。径向基神经网络结构,如图3所示。

图3 径向基神经网络结构Fig.3 Radial Basis Function Neural Network Structure
根据图3可知,设计方法引入的径向基神经网络包含三层,分别是输入、输出和隐含层,并且其包含n个神经元。将神经元xj到神经元xi的联接强度,即权重变化Δxij用下式表达:
式中:α—学习常数;aij—激活度;yj(t)—神经元输出。采用径向基神经网络对不确定部分r进行逼近时,设其逼近误差为β,基函数中心矢量最优值为d,基函数宽度最优值为δ,令x*则神经网络的理想逼近为:
式中:κ—网络参数。
此时径向基神经网络的建模误差为:
在获取误差后,修正控制器,径向基神经网络自适应控制器为:
完成上述设计后,将第二类拉格朗日方程与机械臂的动量守恒联系起来,计算出机械臂载体在姿态和方位角受控下的机械臂控制动力学公式:
机械臂的轨迹控制力矩τ=(τ0τ1τ2)T为网络输入(关节控制角度偏差与角速度偏差)、网络权重、伸缩与平移指数的函数[10]。假设qd是预期轨迹,g是参照轨迹,s是滑膜面,v(t) 是控制偏差,α是正定对角矩阵,则获得如下关系式:
常规机械臂轨迹控制方法中,设计控制律τ和补偿项u表达式为:
式中:∂—补偿项系数;cV—滑膜补偿器;cN—理想的神经网络控制器;e(t)—高斯函数。
由于控制器自身架构的复杂性,在实际柔性关节机械臂轨迹调整过程中无法准确描述控制器的动力学参数,因此利用上式的调整规律并不能得到有效的机械臂输出扭矩幅值。考虑到径向基神经网络的非线性逼近性能,对算法进行优化,得到新的调整律:
式中:W*—未知的理想参数矩阵;ε(x)—逼近计算的偏差。
式中:c(τ)—神经网络轨迹控制器。
综上所述,完成二连杆柔性关节机械臂轨迹跟踪控制方法的设计。本次先对二连杆柔性关节机械臂的机械结构及其运动原理进行分析,对其阶跃响应时间过长的原因进行分析,完成柔性关节机械臂轨迹控制层次结构的设计。然后对柔性关节机械臂轨迹跟踪控制方法进行设计。基于径向基神经网络架构,设计机械臂轨迹跟踪控制算法模型,以此完成二连杆机械臂轨迹的跟踪控制。
3 实验
3.1 实验环境设置
为了验证所提方法对柔性机械臂轨迹跟踪控制的效果,需要展开实验测试和分析,其实验现场布置,如图4所示。
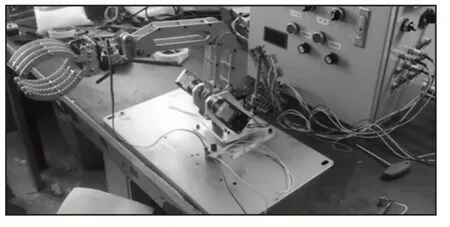
图4 实验现场设置Fig.4 Experimental Site Setup
本次实验选取XBBZD10-15G 型二连杆柔性关节机械臂作为研究对象,其自由度仅为2个,末端执行器可自由开合,完成物体的抓、移、放等动作,获取其相关参数,如表1所示。

表1 研究对象参数Tab.1 Three-Link Manipulator Parameters
在机械臂运动之时,采用力矩传感器、电流传感器、角度传感器、限位开关及数字霍尔传感器等完成其运动数据的采集,然后利用MATLAB中的Simulink模块搭建机械臂运动轨迹跟踪控制的仿真平台。以表1中研究对象的参数为基础,采用D-H坐标转换法完成二连杆机械臂动力学模型的构建,其动力学模型D-H参数,如表2所示。

表2 二连杆机械臂D-H参数表Tab.2 D-H Parameters of Two Link Manipulator
表中:θ—关节扭角;d—连杆偏距;a—连杆长度;α—连杆扭角。利用上述柔性关节机械臂各连杆的D-H 参数建立的动力学模型,如图5所示。
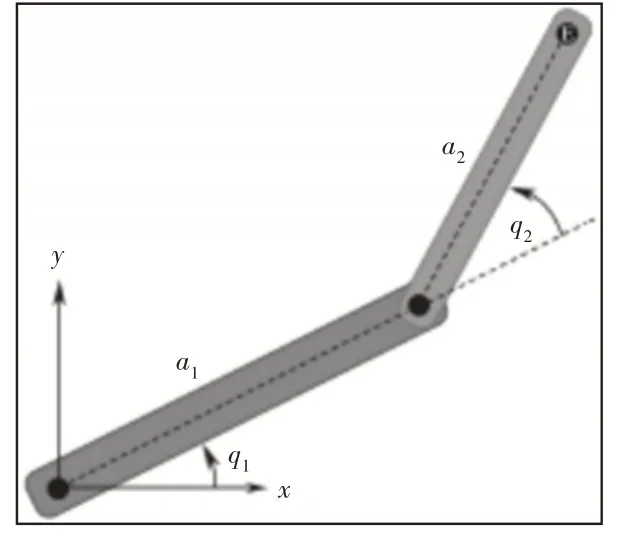
图5 柔性关节机械臂动力学模型Fig.5 Dynamic Model of Flexible Joint Manipulator
将D-H参数导入MATLAB仿真软件中建立仿真模型,然后利用所提方法对其进行运动轨迹跟踪测试。
3.2 系统阶跃响应测试
为检验所提机械臂轨迹跟踪控制方法的应用性能,对其进行可行性测试。本次研究选取阶跃响应时间作为指标展开性能评估。实验中,阶跃响应时间可通过计算机自带的软件进行统计,其指标越小,代表测试方法越可快速进入稳定状态。选择相应的轨迹控制参数,以关节1作为实验目标,提取机械臂关节阶跃信号和正弦信号,检测阶跃响应特征,其结果,如图6所示。

图6 阶跃响应曲线Fig.6 Step Response Curve
从上图可以看出,所提系统的阶跃响应上升时间约为1.1s,1.1s后的阶跃信号和响应信号幅值基本一致,没有明显的稳态误差,由此可证明搭建的系统能够抵抗外界的干扰,可稳定、快速地开展机械臂关节轨迹控制,具有一定可行性。
3.3 系统控制性能对比测试
验证所提方法可行性后,选取弹性关节空间机械臂级联智能滑模控制(文献[4]方法),基于三角函数的机器人手臂轨迹跟踪控制重力补偿算法(文献[5]方法)和多关节机械臂的高阶滑模神经网络自适应控制(文献[6]方法)作为对比方法,选取机械臂轨迹偏差、机械臂调整角度误差作为测试指标,开展对比测试。
3.3.1 机械臂轨迹控制偏差
为检验系统控制性能,在考虑摩擦非线性及外界干扰等因素的背景下,先测试四种方法应用后机械臂的轨迹跟踪控制效果,获取轨迹控制偏差对比结果,如图7所示。

图7 应用不同方法的轨迹控制偏差Fig.7 Deviation of Trajectory Control Using Different Methods
根据图7(a)~图7(d)数据可知,应用所提方法的轨迹调节偏差在(-0.5~0.7)mm之间,而应用文献[4]方法的轨迹调节偏差在(-2.3~2.2)mm之间,应用文献[5]方法的轨迹调节偏差在(-2.3~4.2)mm之间,应用文献[6]方法的轨迹调节偏差在(-3.8~5.1)mm之间,故应用所提方法的控制性能更优。这主要是由于所提方法在对其进行仿真模拟时,先对其机械运动性能进行分析,建立了二连杆柔性关节机械臂的动力学方程,然后基于径向基神经网络设计了一种柔性关节机械臂轨迹跟踪控制算法,提升了其控制精度,使其轨迹控制误差减小。
3.3.2 机械臂调整角度误差
为进一步检验系统的控制性能,在同样的实验环境中测得三种方法应用后机械臂的调整角度误差,所得结果,如表3所示。

表3 不同方法的机械臂调整角度误差Tab.3 Adjustment Angle Error of Mechanical Arm with Different Methods
根据表3可知,应用所提方法时机械臂关节角度误差最小,其误差最大为0.05rad,而应用文献[4]方法时机械臂关节角度误差最小为0.09rad,应用文献[5]方法时机械臂关节角度误差最小为0.10rad,应用[6]方法时最小误差为0.15rad,由此可证明应用所提方法控制效果最优。这主要是由于本次研究利用了径向基神经网络的非线性逼近特性对机械臂轨迹跟踪控制算法进行了优化,完成控制精度的提升,降低了机械臂关节调整角度的误差,实现对机械臂运动轨迹的精准控制。
4 结语
为提高机械臂复杂曲线控制轨迹的精度,减小误差,本次研究提出了二连杆柔性关节机械臂轨迹跟踪控制方法。该方法能充分采集机械部件不同时期的轨迹跟踪信息,有效控制关节的转矩幅值的变化,完成机械臂所需的动作指令。通过与文献方法的实验对比分析,可看出所提方法可提高了对机械臂轨迹的控制精度,降低了机械臂关节的调整角度误差,对柔性机械臂轨迹控制方面具有一定应用价值。