多模态柔性振动的混合时滞滤波抑制方法
2023-12-26孙若怀
孙若怀,徐 方
(1.沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110168;2.哈尔滨工业大学航天学院,黑龙江 哈尔滨 150006;3.中科院沈阳自动化研究所机器人国家重点实验室,辽宁 沈阳 110016)
1 引言
柔性机器人因其机械结构追求轻量化设计以及减速机等零部件导致本体的刚性不足,在运动中通常伴随有一定程度的振动。这将增加控制的难度,降低轨迹精度。
针对这一问题,业内已经有部分研究成果。例如,文献[1]提出了一种基于内模控制原理以及机器人的动力学模型,在伺服驱动的位置环和速度环之间加入一个滤波器实现了对机器人本体振动的抑制;文献[2]基于弹性基和弹性关节空间动力学模型,优化自适应控制律实现了基座和关节弹性振动同步抑制;
上述的方法要么是给出了理论上的方法辅以仿真结果验证,要么是在驱动器层增加复杂模型或增加陷波滤波器来实现振动抑制的效果。目前市面上主流的驱动器产品均已配备陷波滤波器,但是效果并不理想[3-4]:大多数陷波滤波器的效果十分有限,且会引入不可控的滞后[5-8],难以量化对机器人运动性能的影响;同时,机器人拥有多个关节,每个关节的驱动器单独进行振动抑制难以达到所有关节协调一致的效果,破坏多轴协同的时间同步性[9-10]。在机器人控制器层级中引入级联多模态时滞滤波器器,该层级在控制系统架构中位于驱动器的上一层级的规划调度层,在控制器中通过纯软件实现了对轨迹信号中引起共振的成分的滤波,有效降低残余振动。
2 振动的产生和抑振原理
2.1 本体振动问题分析
研究所用的机器人为6自由度柔性多关节机器人采用一体化关节设计,机械构型,如图1所示。机器人的6个一体化关节均采用减速比为101的谐波减速机。因而机器人的柔性主要为关节柔性,机器人快速启动或停止时关节处易产生形变,由形变吸收掉启停阶段冲击的能量,直至形变恢复。这一过程即为机器人的振动。通过增加机械刚度的手段对于连杆柔性效果不佳。

图1 6自由度柔性机器人机械结构Fig.1 Mechanical Structure of 6-DOF Flexible Robot
机器人的六个关节负载逐级递减,如图1所示。即使每个关节均采用相同的部件,其振动特性也会有所区别,机器人应当存在多模态的振动。每个模态的频率应当不相同。
2.2 主动振动抑制原理
机器人单关节旋转是典型的位置随动系统,具有关节柔性的机器人本体轴可以近似为一个二阶欠阻尼线性系统。该系统的单位脉冲响应可表示为:
式中:t—时刻;ξ∈[0,1]—阻尼比;ωn—系统的无阻尼固有频率;ωd=ωn—系统的阻尼固有频率。对于输入脉冲,二阶系统的时域响应在收敛于目标位置之前为减幅振荡,这个振荡过程在宏观上体现为机器人的单个关节做单模态的振动。
系统输入两个为A1δ(t-t1),和A2δ(t-t2)。前者的幅值为A1,作用时间为t1,后者的幅值为A2,作用时间为t2。通过设计两个脉冲信号的幅值和时滞,可以恰好使两个信号的响应在t≥t2叠加为0,完全消除系统的振动。
可将原输入与该脉冲进行卷积以获得能够使振动消除的输信号,这种手段即为时滞滤波。时滞滤波在控制系统中通常最为前馈存在,是抑制振动的有效手段。
3 多模态柔性系统时滞滤波器设计
由n个脉冲时滞滤波器的时域表达为:
其传递函数为:
由于滤波前后,信号的增益不变,有:
为保证最小时滞,规定t1=0。在无时滞滤波器作用的情况下,t时刻(t≥tn)系统响应为:
经过n脉冲时滞滤波器整形后,t时刻系统的响应为:
系统残余振动定义为采用时滞滤波的系统响应与原始响应振幅之比。
3.1 ZV型时滞滤波器
最典型的时滞滤波器是零振动(ZV)滤波器。传递函数:
令残余振动为0,即:
求得脉冲幅值时滞分别为:
增加约束条件,使式(7)在ωn处对ω微分为0。即:
取n=3,即为ZVD时滞滤波器,求解式(9)、式(12)可得3脉冲时滞滤波器得幅值和时滞分别为:
ZVD滤波器相比ZV滤波器具有更好的鲁棒性。
3.2 最优时滞滤波器设计
ZVD时滞滤波器在应对多模态柔性系统时,存在如下问题:
(1)仅采用单ZVD滤波器,最大能够抑振的范围即为以ωn为中心,左右各0.5ωn的频宽范围内,因而宽度不够。
(2)为保证多模态柔性系统多个自由度具有相同的运动节拍,可采用多个ZVD时滞滤波器级联的方式,如此做会显著增大系统时滞。
需对滤波器的时滞进行优化。二阶线性系统可描述为:
其状态空间表示为:
状态方程(20)的解可表达为:
其中φ(t)为状态转移矩阵:
选定优化目标函数为:
滤波器具有3个脉冲,传递函数为:
式中:ki—第i个脉冲的幅值;(i-1)Ts—第i个脉冲的时滞。其单位脉冲响应为:
单位脉冲输入u(t)经过时滞滤波器的整形后变为f(t)。系统初态为0。将式(17)代入式(19),X(t)中的定积分可改写为叠加形式。
定义:
f=[k2k3]T,1阵由 1输1矩阵B∈R2×1,Φ(t)∈R2×2。X(t)可化为:
J(t)在t≥2Ts时,可转化为f的函数。J(t)取值最小的充要条件为:
k1,k2,k3比例固定,设k1=1,可得:
将式(18)、式(23)代入式(26)得:
三脉冲幅值之和为:
根据式(4)的约束,对幅值归一化,有:
时滞参数Ts没有限制,但为保证系统没有严重超调,应保证系统不含有负脉冲。需要令ωdTs≤0,因此有:
式中:n—整数,考虑到时滞Ts要尽量小,故取n=0。
经过时间优化后,时滞最高可以降低至原本的一半,对于低频模态效果显著。
3.3 基于混合时滞滤波器优化振动幅度
在多模态柔性系统中,每个振动模态的振动均有一定的变化范围,假定某个模态的频率变化范围是[ωl,ωh],参数变化遵循平均分布,即频率的概率密度函数为:
为综合考量频率误差与时滞对于残余振动幅度的影响,通过将最优时滞滤波器与ZVD时滞滤波器相混合,对于混合参数进行优化来实现最小幅值。
对于式(35)取最小值,记为:
另一个三脉冲时滞滤波器的时滞记为:
定义混合参数λ∈(0,1),分别对脉冲幅值和时滞进行插值。
式中:i=1,2,3;Ai—混合后的脉冲幅值;Ai1—最优时滞滤波器的第i个脉冲幅值;Ai2—用于混合的三脉冲时滞滤波器的第i个幅值。因此,T为混合后滤波器的时滞,因此有作用时间ti=(i-1)T。可见时滞T是关于λ的函数,且其取值满足式(31)。
定义基于频率误差的优化函数:
参考式(7),V(ω,T)可写为,如式(37)所示。
由于,式(37)中,T和Ai均为λ的函数,将问题简化为目标函数J取得极小值时λ的求解。经过时滞和残余振动幅值双重优化后,与采用ZVD时滞滤波器时的时滞之比为(1 +λ)/2。
3.4 级联多模态混合时滞滤波
柔性系统共有N个模态,通过级联多个时滞滤波器来保证各模态控制节拍的同步性。有ni个脉冲构成,因此总传递函数记为:
将式(43)展开后,按照作用时间升序排列,记为:
其单位脉冲响应为:
机器人位置轨迹关于时间的函数为:
输出轨迹经过时滞滤波器调整后为:
控制器循环周期为Tm,式(42)进行离散化,得:
式中:k—控制周期数,kp=tp/Ts。
4 实验
4.1 本体实验
实验采用新松公司自主研发的20KG 关节一体化机器人。能够完全获取机器人运动数据,如图2所示。

图2 实验所用机器人Fig.2 Robot Used in the Experiment
本实验中采用通过统计跟踪差曲线中相邻波峰或者波谷的间隔时间来确定振动周期范围[Tmin,Tmax],则振动频率范围为[2π/Tmax,2π/Tmin]。
首先需要对本体各轴的振动频率进行测定:通过控制器输出位置指令,速度采用S型规划,输出位置指令从-90°运动到90°。将每个周期控制器发送到驱动器的位置指令与驱动器反馈给控制器的实际位置作差,通过跟踪差来表征机器人的振动,如图3所示。

图3 关节位置振动示意Fig.3 Vibration of Joint Position
从上图3 中可看到,相邻波峰间间隔的节拍数为(19~21)。控制系统循环周期为4ms,对应振动周期为(0.076~0.08)s。由图3相邻的波峰间衰减不明显,阻尼比ξ取为0。可得到全模态振动频率,如表1所示。经过式(36)的优化函数,可求解各级混合滤波的混合参数λ,如表2所示。

表1 各关节振动频率分布Tab.1 Vibration Frequency Distribution of Each Joint

表2 各级混合参数Tab.2 Mixed Parameters at All Joints
相比于使用ZVD 时滞滤波器,各级的时滞,分别降低至55.03%、56.66%、57.56%、57.66%。单独运动各关节,观察各级单模态的抑振效果。
将四级混合时滞滤波器级联,对所有关节的位置指令同时滤波。联动状态下机器人的关节1~关节4,机器人滤波前后的振动曲线,如图4~图11所示。
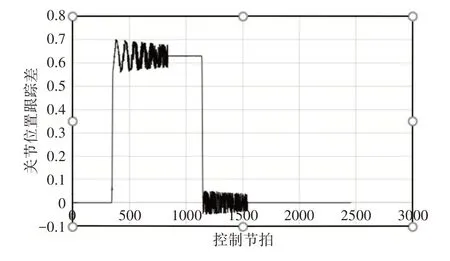
图4 关节1振动曲线Fig.4 Vibration Curve of Joint 1
经过图4、图6、图8、图10可见多轴联动情况下,各级振动模态的频率误差大,始终在频率的上下限范围内浮动,以至于振动周期不能形成清晰的周期性曲线,本体的振动剧烈。从图5、图7、图9、图11可看出,通过级联两种滤波器均可对四个模态的振动有效抑制。但级联混合时滞滤波器在时滞上显著由于级联ZVD滤波器。

图5 滤波后关节1振动曲线Fig.5 Vibration Curve of Joint 1 After Filtering

图6 关节2振动曲线Fig.6 Vibration Curve of Joint 2

图7 滤波后关节2振动曲线Fig.7 Vibration Curve of Joint 2 After Filtering
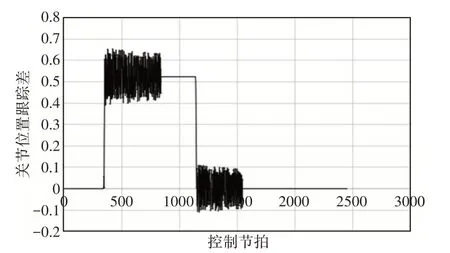
图8 关节3振动曲线Fig.8 Vibration Curve of Joint 3

图9 滤波后关节3振动曲线Fig.9 Vibration Curve of Joint 3 After Filtering

图10 关节4振动曲线Fig.10 Vibration Curve of Joint 4

图11 滤波后关节4振动曲线Fig.11 Vibration Curve of Joint 4 After Filtering
通过机器人控制器输出全部关节联动的轨迹,为了让本体振动尽量充分,各轴均选取能够行走的最大行程。
4.2 评判指标
对于振动抑制效果的评价可从时滞和残余振动两个方面进行。本实验中,对比两种级联滤波器的在介入系统后产生的总时滞之比,以典型的ZVD 滤波器为基准,主要考察采用混合滤波后,机器人的时滞减少的百分比。参考表1中的频率分布,和表2中的混合参数。采用混合滤波的总时滞为:
代入表1 和表2 的数值,可得THY=0.3438s,TZVD=0.6160s,总时滞减少幅度达44.19%,效果显著。可见对于存在低频振动的多模态柔性系统,采用混合时滞滤波可有效降低时滞,提升系统响应速度。
对于抑振效果的评判,可采用可决系数来评判,将跟踪差水平段作为基准,分别分析混合滤波和ZVD滤波后数据相对于基准数的可决系数,可决系数的数学表达式,如式(46)所示。
式中:y—原始纵轴数据—拟合后的结果—原始数据的平均值。可决系数接近于1则效果越好,反之效果越差。分别对采用两种滤波方法后各级模态的跟踪差曲线的可决系数进行统计,可得到,如表3所示。

表3 各级模态振动抑制效果Tab.3 Vibration Suppression Effect of Various Modals
4.3 结果分析
从表3可见,ZVD滤波总体效果略好于混合滤波,但是在频率误差最大的第四模态,混合滤波基于频率误差优化了振动幅值,因此效果要好于ZVD滤波。在振动抑制效果基本一致的情况下,结合时滞减少幅度达到44.19%方法的实用价值有着显著提升。
5 结论
针对柔性多关节机器人中存在的多模态振动问题进行了详细研究。从产生振动的原理上分析了采用时滞滤波方法来抑制具有关节柔性的机器人振动的可行性。以典型的时滞滤波器在处理多模态振动问题上的容易引起时滞显著增加的问题为切入点,首先针对各级单模态是设计了最优时滞滤波器,同时为保证系统时滞滤波器中包含负脉冲导致超过控制指令的响应,将最优时滞做了限定。通过设计混合时滞滤波器建立将对频率误差和时滞的多参数优化问题,转化为对于混合参数的优化问题。最终通过机器人本体实验,通过可决系数评判滤波器的振动抑制效果,提升了频率误差较大的模态的抑制效果,同时可在确保各级振动抑制效果几乎没有损失的前提下将时滞降低44.19%,显著提升了级联时滞滤波器的实用价值。