振动趋势判别云模型的故障诊断方法
2023-12-26张栋良洪勤勤汪刘峰张凯文
张栋良,洪勤勤,汪刘峰,张凯文
(1.上海市电站自动化技术重点实验室,上海 200090;2.上海电力大学自动化工程学院,上海 200090)
1 引言
汽轮发电机组是化石燃料电厂中的核心设备。它能否安全、稳定、可靠地运行,不仅涉及其本身的运行寿命、维护成本和经济性指标[1],而且关系到整个电力系统的运行状态。因此,针对汽轮发电机组的状态监测及故障检测己经成为一个重要的研究方向。
当前,国内外学者在故障诊断的各个环节都进行了大量的研究。以专家系统为代表的定性方法具有较强的知识表现能力和故障解释能力,但对不完整数据的容忍能力较差,且系统的维护难度较大[2]。基于解析模型的定量分析方法需要较好地掌握故障机理,但现代机械设备的多工况交替,结构复杂耦合等现实因素,对解析模型的准确实现提出了巨大的挑战。与此同时,进入“大数据”时代的机械智能故障诊断受到了广泛的研究。文献[3]针对多排行星齿轮传动系统的复合故障,提出了基于动力学模型和多尺度排列熵的故障诊断方法,在考虑路面激励的情况下表明该方法能准确有效地识别多排行星齿轮系统的故障模式。文献[4]采用小波包变换对振动信号进行分解重构,根据重构信号和希尔伯特边际谱的统计特征参数来标记特征对轴承故障的重要度,并利用随机森林实现了滚动轴承故障特征的分析和状态识别。文献[5]提出了一种广义复合多尺度加权排列熵与天牛须搜索优化支持向量机的故障诊断方法,在实际运行状态下该方法在高效性和准确度方面均有较好表现。可以看出,大部分文献都是通过数据驱动分类器的方法对故障模式进行识别。这类单纯基于数据的方法没有考虑系统的机械构造和内部机理因素,导致诊断结果的精确度较容易受到过程参数设置的影响,也无法对故障进行准确合理的分析和解读。另一方面,工业现场的汽轮机故障“大数据”样本普遍存在着大数量、低密度等特点,重大故障样本更为稀少,这意味着数据实际训练样本不足,导致大体量数据仍无法较好地实现综合性故障诊断的目标,这也成为基于数据驱动的故障诊断方法不可避免的缺陷[6]。
在当前的汽轮机诊断方法中,通过自然语言描述的专家经验知识进行故障定位仍占据较大比重。振动专家对汽轮机振动故障的梳理中,经常提到不同故障时,振动在时间、转速空间中存在着特殊趋势。这些具有明显区分性的序列数据定性趋势特征,在现场诊断文献、报告中常会出现,却很少被用于建立智能诊断模型[7],主要是因为汽轮机设备的故障样本稀少,来自专家经验的趋势定性描述不易与数据驱动的诊断模型相结合。如何实现趋势的定性描述与定量计算之间的等价转换是解决上述问题的关键。
在定性趋势分析方面,目前的研究大部分都是基于基元拟合及匹配[8]的方法。文献[9]提取了道岔不同状态下典型运转信号的趋势特征建立故障趋势诊断知识库,将通过小波去噪和区间半分法得到的待诊断信号的趋势基元与所有故障趋势规则进行匹配度计算,诊断结果表明正确率达到90%以上。文献[10]以补偿电容位置为区间分割点,提出了基于模糊基元趋势的JTC综合故障诊断方法。上述基元拟合方法在轨道交通等故障类型清晰、故障特征易于识别的领域具有良好的应用效果。然而,汽轮机由于本身机械结构高度耦合、运行过程多工况交替等原因带来的故障样本复杂多样、模糊性和随机性无法忽视等实际因素,基元拟合的方法在汽轮机故障诊断中的适用性较差。而探讨了模糊性和随机性的云模型在定性自然语言描述与定量数值转换方面得到了广泛的关注。文献[11]利用逆向云算法提取刀具磨损的云特征参数,实现了刀具不同磨损状态的有效识别。文献[12]建立了基于云模型的齿轮健康状态评估模型。可以发现,云模型在汽轮机的故障诊断领域鲜有应用。
针对上述汽轮机故障样本数据缺乏、简单定性趋势无法消除随机性和模糊性的影响,定性描述与定量计算之间的合理转换问题,这里提出了一种基于云模型的汽轮机振动时间序列趋势判别方法。首先考虑模型不确定性,通过总结专家经验和故障案例,结合云模型生成定性趋势的云参数评估模型;然后考虑样本不确定性,利用样本数据通过逆向云得到的云参数生成大量云滴,代入云参数评估模型计算趋势等级确定度;最后引入趋势判别决策树得到序列的定性描述。以某亚临界双排汽凝气式汽轮机为研究实例,验证了该方法的可行性和有效性。
2 云理论
在现场各种故障案例中,诊断的专家经验知识通常都是用自然语言描述的,其中所涉及的概念包含着模糊性或者随机性,抑或是两者兼有。目前已经存在许多不同视角下的不确定性研究,包括信息熵、混沌和分形等,但是随机性和模糊性的关联性研究一直没有得到广泛的关注。基于此,文献[13]提出了一种实现定性概念与定量数值之间双向转换的不确定性认知模型—云模型,如今已在智能控制、数据挖掘、系统评估、信号处理等多个领域得到应用[14]。
2.1 云的定义
定义1[13]:设U是一个可用精确数值表示的定量论域,C是U上的一个定性概念,若定量数值x∈U是定性概念C的一次随机实现,x对C的确定度μ(x)∈[0,1]是具有稳定倾向的随机数,即:
则x在论域U上的分布称为云(Cloud),每一个x称为一个云滴(Drop)。
根据云的性质,定义1中的随机实现是概率意义下的实现;确定度是模糊集合意义下的隶属度,因此体现了模糊性和随机性的关联性。在论域空间中,许许多多的云滴组成了概念云,而概念的整体特征可以用云的定量数字特征期望Ex、熵En和超熵He来表示。
期望Ex是云滴在论域空间分布中的数学期望,代表着定性概念量化的最典型样本。
熵En是定性概念的不确定性度量。一方面,它反映了表示概念的云滴的离散程度,是概念的随机性度量;另一方面,它决定了论域空间中可被概念接受的云滴的确定度,即En能反映随机性和模糊性之间的关联性。
超熵He是熵En的不确定性度量。He越大,隶属度的随机性越大,云的“厚度”越大。
云模型基于不同的概率分布可以构成不同的云,正态隶属云揭示了自然和社会科学中大量的模糊概念所遵循的基本规律,具有普遍适用性[15]。
定义2[13]:设U是一个用精确数值表示的定量论域,C(Ex,En,He)是U上的定性概念,若定量值x(x∈U)是定性概念C的一次随机实现,服从以Ex为期望、En'2为方差的高斯分布x~N(Ex,En'2),其中,En'又是服从以En为期望、He2为方差的高斯分布En'~N(En,He2)的一次随机实现;进而,x对C的确定度满足:
则x在论域U上的分布称为正态云。
梯形云的数字特征可以用期望Ex1和Ex2、熵En1和En2、超熵He1和He2共6个变量来表征。(Ex1,En1,He1)和(Ex2,En2,He2)分别表示左半升和右半降正态云特征。当x满足Ex1≤x≤Ex2时,有μ(Ex1≤x≤Ex2)=1。这里引入了三种云发生器,如图1所示。

图1 云发生器Fig.1 Cloud Generators
正向云发生器(FCG)是由云的数字特征C(Ex,En,He)产生大量云滴及其确定度;逆向云发生器(BCG)是将一定量的精确数值转化为以数字特征C(Ex,En,He)表示的定性概念。正向云和逆向云分别实现了定性-定量和定量-定性的有效映射。X条件云发生器是在已知C(Ex,En,He)的基础上对给定的一个精确数值xi计算其确定度的过程。云算法的具体实现步骤见文献[13]。
2.2 概念等级云参数的确定
3 振动趋势判别模型的建立
根据汽轮机振动机理和长期的现场故障诊断经验,专家得到了多种典型振动故障的工况、时间因素及频率特征之间的关系。专家通常会从变化幅度和时间跨度两个层面来描述振动趋势,例如“转子振动尤其是7号轴承x方向轴振爬升速度较快,半个小时由最初的70μm增大到200μm左右”。不同故障的振动变化程度具有不同的时间尺度衡量标准,除了发生部件飞脱导致的转体质量不平衡时会产生阶跃式的振动突变,其他故障基本是在一定时间(分、时、日)内看出振动幅值或者相位的变化。因此,针对不同故障的趋势判别,要合理选择时间序列的长度和采样间隔时间。
3.1 振动趋势的云参数评估模型
汽轮机发生故障时,振动数据是反映运行状态变化最基本直观的一项指标。专家对于振动的变化趋势通常描述为振幅突升、相位波动、振幅快速下降、振幅基本稳定等。由众多故障案例和专家经验知识[1,16]总结得到的振动趋势特征描述,如表1 所示。对于趋势的讨论是在定转速的前提条件下进行的。

表1 振动趋势特征描述Tab.1 Vibration Trend Characterization
在研究序列数据趋势时,通常将角度变化作为重要的判断依据。对于一段长度为Δx,幅值变化为Δy的序列数据,可以将θ=arctan(Δy/Δx)作为趋势的分级指标。
结合表1的专家经验知识,定性振动趋势通过式(3)~式(5)计算得到了趋势等级云参数,实现了定性-定量的映射转换。根据云参数,利用正向云发生器生成每个趋势等级的云模型。振动趋势为“稳定”时的正态云图,如图2所示。Ex的值为0,表示当振幅变化角度为0°时,趋势属于“稳定”这一概念的确定度为100%,即角度没有变化是“稳定”的最理想状态。随着变化角度的增大或减小,确定度也逐渐减小,当变化角度在20°左右时,确定度非常接近于0,意味着这个变化角度几乎不属于稳定的概念。

图2 趋势“稳定”特征云Fig.2 Trend "Stable" Characteristic Cloud
当振动趋势处于上升和下降时,可以引入的梯形云来描述,如图3所示。角度处于Ex1和Ex2之间时的确定度都为1,随着角度超出范围,确定度逐渐下降。当变化趋势表现为角度急剧减小的突降时,可以用右半下降梯形云来表征。表现为角度急剧增大的突升时,则采用左半上升梯形云。相比于正态云而言,梯形云更符合人类实际的概念认知。

图3 梯形云模型Fig.3 Trapezoidal Cloud Mode
将不同定性趋势按计算得到的期望值Ex、熵值En和超熵值He进行云模型构建,得到的二维云图,如图4所示。

图4 不同趋势的云特征图Fig.4 Cloud Characteristics Map of Different Trends
由图4可知,由于趋势特征描述中振动趋势稳定的幅值变化范围较小,所以云图角度跨距相较于上升和下降的范围小;由于反正切函数的边缘性,突升突降趋势的细微角度变化会引起确定度的较大改变,因此云参数评估模型对突变趋势更加敏感。
3.2 样本振动趋势确定度的确定
在大多数序列数据趋势识别的文献中,通过序列分段后进行最小二乘线性拟合是最普遍的研究方法。这种整体拟合方法可以灵活压缩大体量的数据,过程简单易于实现,但对于样本数据变化频繁的情况具有一定的不适应性,通常拟合效果并不尽如人意。
每一个正常采样的汽轮机振动数据都包含着不能轻易忽略的信息,整体拟合的方法会平滑掉某些故障刚开始发生时细微但关键的振动特征,对诊断结果和监测效果带来影响。因此,对长度为n的序列数据,采用相邻两个数据点逐次相连的方法,得到包含趋势信息的n-1个矢量:
等距离采样时lk与θk一一映射,因此在描述趋势时可以只根据θk的变化确定趋势等级确定度。
目前在利用云模型计算确定度的研究中,传统方法是直接将样本期望值代入评估等级的X条件云模型中计算平均确定度作为判断依据。这种方法易于快速实现,但会在一定程度上忽略样本的不确定性。针对这个问题,综合考虑趋势云参数评估模型和振动样本数据的不确定性,先利用逆向云得到振动样本数据的云参数,再根据样本云参数生成大量云滴,代入定性趋势的云参数评估模型中计算确定度,得到当前样本数据的云滴确定度矩阵mi:
式中:N—分段子序列数。最后将N个云滴确定度的平均值作为第f段序列数据的最终确定度Mf:
3.3 振动趋势判别决策树
根据振动趋势的特征,定义如下4个参数:变量Vsta和阈值Tjr、Tjd、Twav。
(1)变量Vsta是一个衡量数据是否稳定的变量,定义为:
当变量Vsta的值大于1时,表示θsta的值同时大于θsd和θsr,序列数据稳定性高。
(2)Tjr和Tjd分别是趋势突升和突降的阈值。当θjr >Tjr时,认为序列数据的趋势为突升;当θjd>Tjd时,认为序列数据的趋势为突降。Tjr和Tjd取值为(0~0.1),越小对突变趋势越敏感[10]。
(3)Twav是一个与数据波动相关的阈值,当|θsd-θsr|<Twav时,认为一段序列数据内小上升和小下降的比例接近,序列有可能存在波动趋势。Twav取(0~0.1),越大对波动趋势越敏感,但取值过大则会影响稳定性的判别,这里取Twav=0.1。
根据以上定义,设计的趋势判别决策树,如图5所示。输入特征为第f段序列数据的最终确定度Mf,通过决策树过程得到该段序列的定性趋势。

图5 趋势判别决策树Fig.5 Trend Discrimination Decision Tree
4 实例验证
以北京重型电机厂引进法国ALSTOM公司技术生产的330MW汽轮机发电机组为例[1]。该机组汽轮机型号为N330-17.75/540/540型,属亚临界、一次中间再热、单轴、三缸双排汽凝气式汽轮机。该机组通过了168h的试运后,进入了生产运行。在运行了大约1个月后,高、中压转子振动出现波动,2号轴承轴振出现较大上升。在之后带额定负荷运行时,(1~4)号轴承轴振出现频繁波动,每次波动的大小不一,周期不等,没有明显的规律。在一次带额定负荷运行的过程中,机组转速为3000r/min,2号轴承再次发生大幅波动,现场2号轴承y方向轴振幅值变化的时域图,如图6所示。
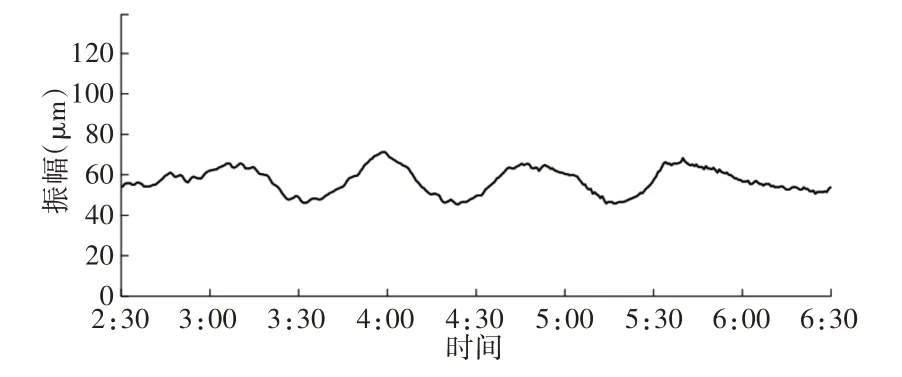
图6 2号轴承y方向轴振时域图Fig.6 Bearing #2 y Shaft Vibration Time Domain Diagram
设置采样时间间隔为每分钟采样1次,窗口长度可以根据现场实际情况灵活调整,本例中采样窗口长度设为15 个采样点。图6的现场振幅数据通过趋势云参数评估模型得到的序列分段趋势确定度结果,如图7所示。利用趋势判别决策树,得到2号轴承y方向振动在2:30至6:30四个小时内的定性趋势描述结果,如图8所示。可以看出,振幅在上升、下降和小波动之间频繁变化,由最初的小波动发展到后来的升降大幅波动。同理,对2号轴承y方向轴振相位进行分析,结果表明相位也存在波动趋势。

图7 2号轴承y方向轴振的分段确定度结果Fig.7 Bearing #2 y Shaft Vibration Segment Certainty Results
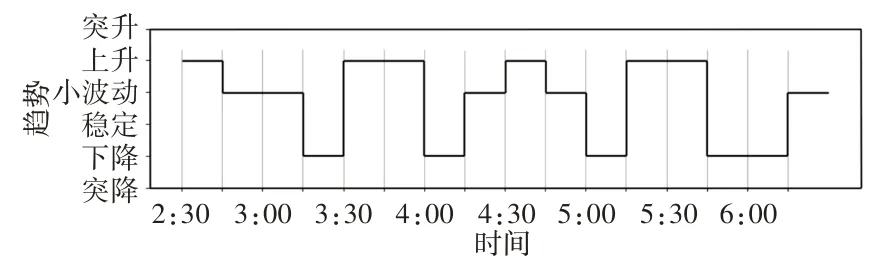
图8 2号轴承y方向轴振的分段趋势结果Fig.8 Bearing #2 y Shaft Vibration Segment Trend Results
采用频谱分析等方法,发现故障期间基频分量的振动偏大,没有出现高阶频谱。采用Pearson相关系数发现振幅与负荷不相关。基于此,建立不完备信息贝叶斯网络推理模型,在故障先验概率都为0.5的前提下,得到的诊断结果,如表2所示。表中:识别结果代表故障特征是否存在,T—存在;F—不存在。

表2 故障诊断结果Tab.2 Results of Fault Diagnosis
如果仅从无趋势特征推理,故障为质量不平衡和转动部件飞脱的可能性较大。在此结果上逐步加入趋势特征进行故障推理,随着趋势特征的丰富,不同故障的发生概率出现明显变化。考虑振幅和相位不存在突变趋势,转动部件飞脱的概率大大减小,再结合振幅和相位的波动不稳定趋势,质量不平衡发生的概率大幅下降,动静碰摩的可能性最大。经检验,该案例实际故障为立销间隙过大造成的轴封处动静碰摩,验证了提出方法的可行性和有效性。
5 结论
汽轮机振动趋势是个常用但是较难准确定义的概念,容易受到很多不确定性因素的影响。将云模型引入了振动趋势确定度计算模型,得到以下结论:(1)针对自然语言的语义不确定性,完成了从汽轮机振动趋势的定性描述到云模型参数的定量转换。(2)考虑了样本数据的不确定性,根据样本生成大量云滴再代入模型计算最终确定度,降低了数据不确定性带来的误差,实现了对汽轮机振动趋势的判别。(3)通过趋势判别决策树,故障诊断实例验证结果表明基于云模型的汽轮机振动趋势判别模型具有较高的应用价值,且结果准确可靠。(4)这里只局限地对故障实例中常见的汽轮机振动趋势进行了研究,对于某些在故障描述中出现不频繁但关键的故障特征,例如相位周期性滞后、轴心轨迹偏移等,如何得到其数学描述尚有待深入研究和验证。