基于稳定逆的生化过程操作曲线求取方法
2023-12-25戴吟刘飞
戴吟 刘飞

基金项目:国家自然科学基金项目(批准号:61833007)资助的课题。
作者简介:戴吟(1998-),硕士研究生,从事工业过程控制及应用的研究。
通讯作者:刘飞(1965-),教授,从事先进过程控制方面的教学与科研工作,fliu@jiangnan.edu.cn。
引用本文:戴吟,刘飞.基于稳定逆的生化过程操作曲线求取方法[J].化工自动化及仪表,2023,50(6):000-000.
DOI:10.20030/j.cnki.1000-3932.202306000
摘 要 针对生化过程中操作曲线的求取问题,提出一种非线性稳定逆的近似求解方法。该方法根据过程动力学模型,利用改进的稳定逆算法来求解对应生产输出目标的操作曲线。并针对稳定逆算法计算量过大的问题,通过对稳定逆原理中的内动态进行离散化处理,将原本利用非线性系统内动态方程求解内动态解析解的过程,利用递推公式转化成求解内动态的离散数值解,从而加快稳定逆算法的计算速度。最后以化学反应器为例进行操作曲线设计的仿真,验证了所提方法的可行性。
关键词 操作曲线 动力学模型 非线性稳定逆 内动态方程 化学反应器
中图分类号 TP273 文献标志码 A 文章编号 1000-3932(2023)06-0000-00
生物及化工生产目标的实现取决于过程温度、流量及液位等关键变量的操作曲线,一旦工艺确定,控制系统即可按照生产操作曲线进行实时控制,从而完成最终的生产要求[1]。生化过程操作曲线的选取与产品质量、产量及生产时间等目标密切相关,由此过程工艺的制定是实现智能生产的核心环节,也是整个生化生产的基础。一般情况,调控参数可以通过工艺人员反复实验得到[2~4],但实验方法需要耗费大量的人力、物力和时间,尤其难以适应现代生产对多品种、小批量、多目标的生产需求,同时也很难通过实验设计的方法来得到动态操作曲线[5]。根据生产目标,在已知生产过程动力学的基础上,通过解析的方法求解操作曲线,是值得开拓的研究领域。从控制理论的角度,这一问题可转化为在动力学模型基础上,根据模型输出轨迹(工艺目标)求取相应的模型输入轨迹(调控曲线),即模型逆的存在性及求解算法。
1996年HUNT L R等針对非最小相位过程首次提出非因果稳定逆的方法[6]。由于稳定逆方法需要未来无穷时刻的轨迹,因此改进的基于预览信息的稳定逆方法被提出[7,8],进一步引入输出误差和控制器输出能量为性能指标,给出了最优预览稳定逆方法[9]。考虑到稳定逆算法需要很大预作用时间区间,利用最优状态转移的方法使过程状态转移到稳定逆初态,进而提出了基于最优状态转移的稳定逆算法[10]。
由于稳定逆算法所需计算量很大,近年来有学者利用迭代学习结合样条技术得到精确跟踪所需的输入控制量[11],还有基于最小二乘、B样条等基函数的方法来求解非最小相位过程的稳定逆[12]。一般而言,与线性稳定逆算法有所区别,非线性过程稳定逆计算中需要利用Picard迭代方法来得到非线性内动态方程的解[8],对于复杂过程模型或者输出轨迹,求解内动态方程时会遇到计算量过大,甚至解析解无法描述的困难。
考虑生化过程非线性动力学情形,笔者基于稳定逆方法,提出了一种生产操作曲线的快速求取方法,即根据过程动力学模型,利用改进的稳定逆算法来求解对应生产输出目标的操作曲线。首先将稳定逆算法中内动态进行离散化处理,利用递推公式推导内动态的离散数值表达式;再以Picard迭代进行递推求取非线性内动态方程的数值解,从而减少计算量、加快稳定逆算法的计算速度;最后以化学反应器为例,进行操作曲线设计验证。
1 操作曲线求取问题
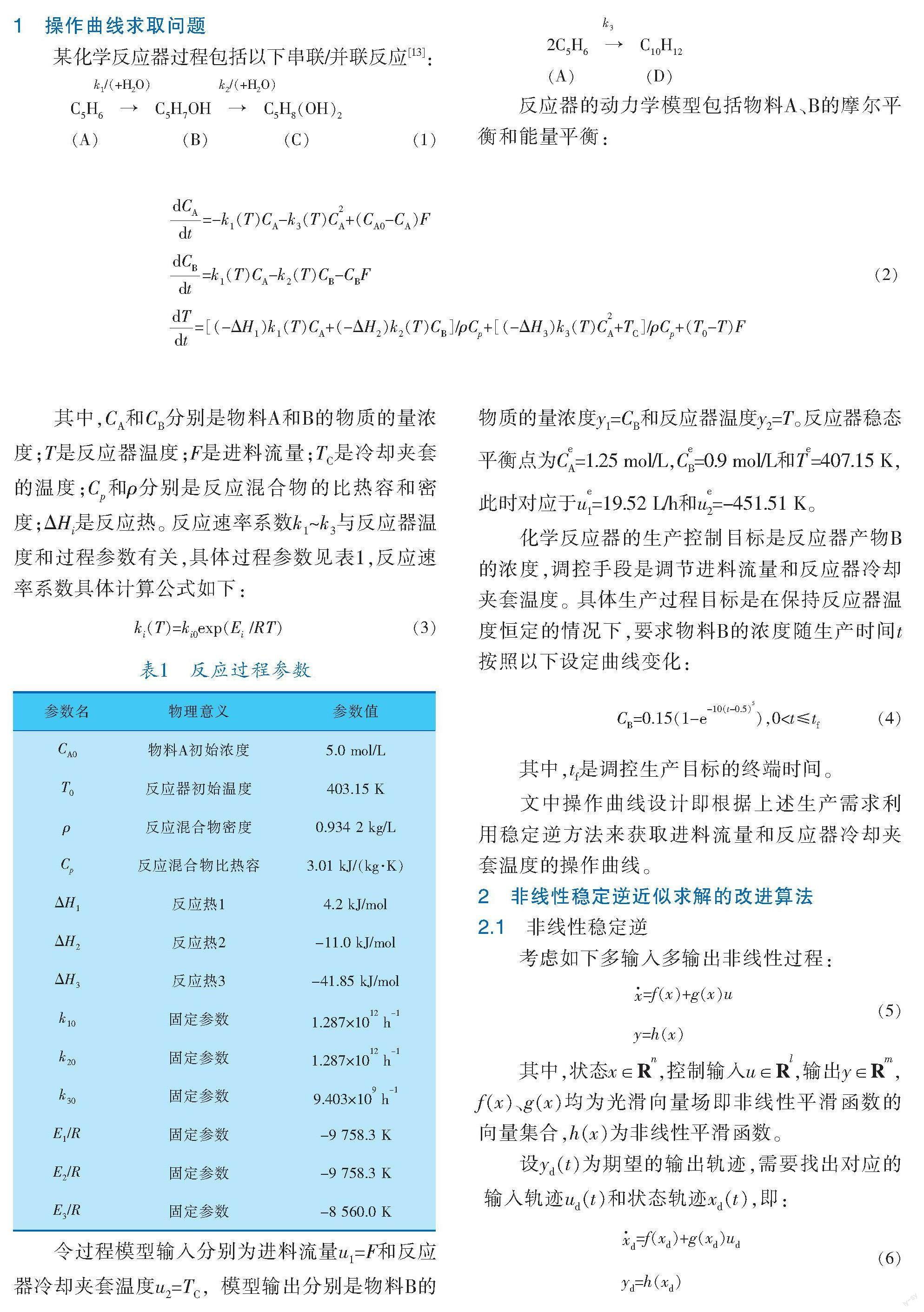
考虑一个化学反应器过程,包括以下串联/并联反应[13]:
(1)
反应器的动力学模型包括物料A、B的摩尔平衡和能量平衡:
(2)
其中,CA和CB是物料A和B的摩尔浓度;T是反应器温度;是进料流量;TC是冷却夹套的温度;Cp和分别是反应混合物的比热容和密度;是反应热。反应速率系数k1~k3与反应器温度和过程参数有关,具体过程参数见表1,反应速率系数具体计算公式如下:
(3)
令过程模型输入分别为进料流量u1=F和反应器冷却夹套温度u2=TC,模型输出分别是物料B的摩尔浓度y1=CB和反应器温度y2=T。反应器稳态平衡点为和,此时对应于和。
化学反应器的生产控制目标是反应器产物B的浓度,调控手段是调节进料流量和反应器冷却夹套温度。具体生产过程目标是在保持反应器温度恒定的情况下,要求物料B的浓度随生产时间按照以下设定曲线变化:
(4)
其中,tf是调控生产目标的终端时间。
文中操作曲线设计即根据上述生产需求利用稳定逆方法来获取进料流量和反应器冷却夹套温度的操作曲线。
2 非线性稳定逆近似求解的改进算法
2.1 非线性稳定逆
考虑如下多输入多输出非线性过程:
(5)
其中,状态,控制输入,输出,、均为光滑向量场即非线性平滑函数的向量集合,为非线性平滑函数。
设为期望的输出轨迹,需要找出对应的输入轨迹和状态轨迹,即:
(6)
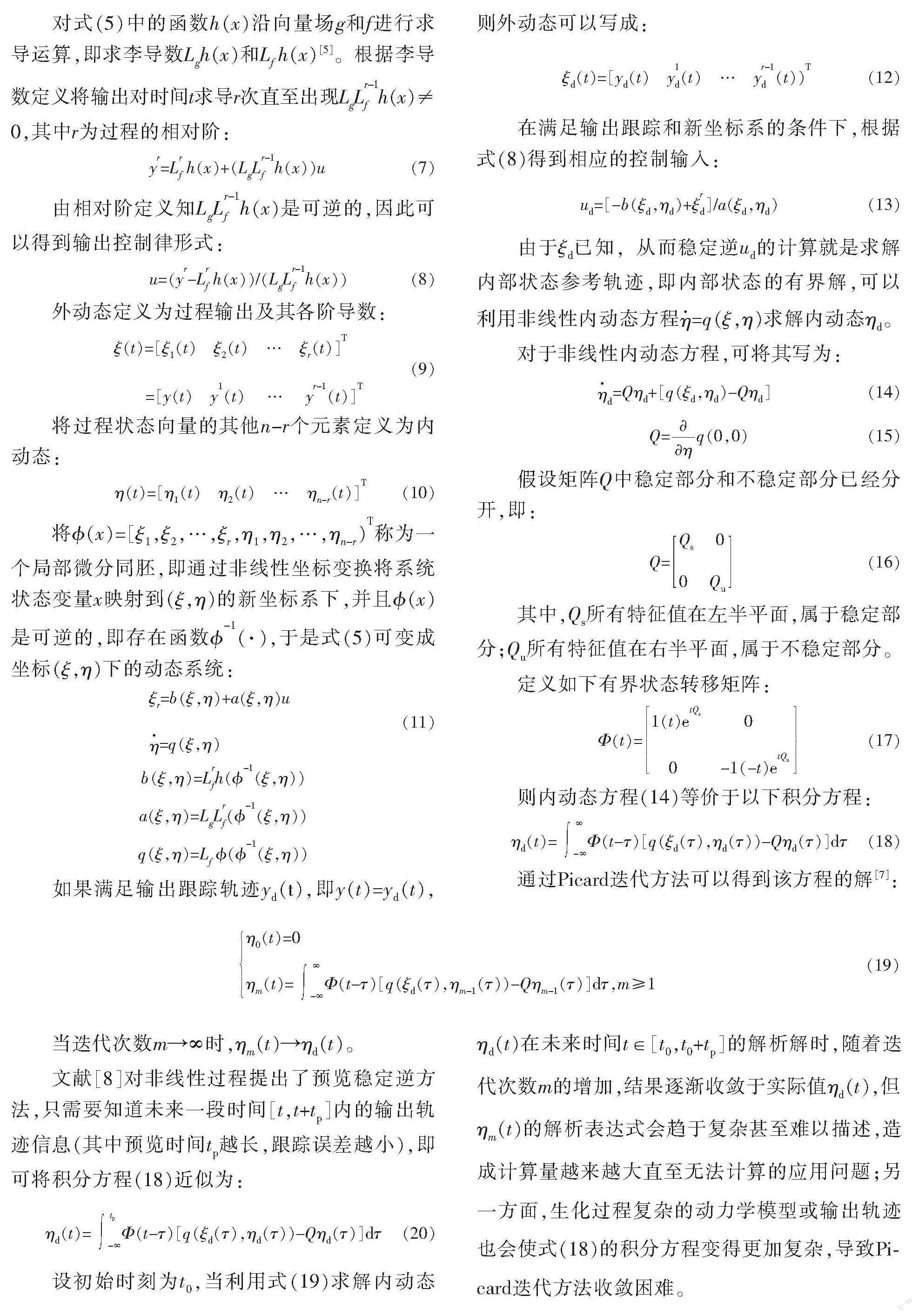
对式(5)中的函数h(x)沿向量场g和f进行求导运算,即求李导数和[5]。根据李导数定义将输出对时间t求导r次直至出现,其中r为过程的相对阶:
(7)
由相对阶定义知是可逆的,因此可以得到输出控制律形式:
(8)
外动态定义为过程输出及其各阶导数:
(9)
将过程状态向量的其他n-r个元素定义为内动态:
(10)
将称为一个局部微分同胚,即通过非线性坐标变换将系统状态变量x映射到的新坐标系下,并且是可逆的,即存在函数,于是式(5)可變成坐标下的动态系统:
(11)
如果满足输出跟踪轨迹,即,则外动态可以写成:
(12)
在满足输出跟踪和新坐标系的条件下,根据式(8)得到相应的控制输入:
(13)
由于已知,从而稳定逆的计算就是求解内部状态参考轨迹,即内部状态的有界解,可以利用非线性内动态方程求解内动态。
对于非线性内动态方程,可将其写为:
(14)
(15)
假设矩阵Q中稳定部分和不稳定部分已经分开,即:
(16)
其中,Qs所有特征值在左半平面,属于稳定部分;Qu所有特征值在右半平面,属于不稳定部分。
定义如下有界状态转移矩阵:
(17)
则内动态方程(14)等价于以下积分方程:
(18)
通过Picard迭代方法可以得到该方程的解[7]:
(19)
当迭代次数时,。
文献[8]对非线性过程提出了预览稳定逆方法,只需要知道未来一段时间内的输出轨迹信息,其中预览时间越长,跟踪误差越小。即积分方程(18)可以近似为:
(20)
设初始时刻为t0,利用式(19)求解内动态在未来时间的解析解时,随着迭代次数m的增加,结果逐渐收敛于实际值,但的解析表达式会趋于复杂甚至难以描述,造成计算量越来越大直至无法计算的应用问题;另一方面,生化过程复杂的动力学模型或输出轨迹也会使式(18)的积分方程变得更加复杂,导致Picard迭代方法收敛困难。
2.2 非线性稳定逆的离散化近似求解算法
2.2.1 内动态离散化处理
假设内动态在未来时间内按时间均匀分解n段,即化成n+1个离散的数值向量,在每一段长度为时间内,被近似认为是一个定值,而不是原先连续随时间变化的函数,离散化后的内动态向量形式表示如下:
(21)
其中,的形式表示函数在时间内离散后长度为n+1的向量。
2.2.2 递推内动态向量
将式(19)积分方程分为稳定内动态和不稳定内动态积分方程,设,分别以特征值为和()的内动态子系统为例推导不稳定内动态和稳定内动态:
(22)
其中,下标s、u分别表示稳定部分和不稳定部分;,M为可逆的内动态分解矩阵。
不稳定内动态向量值的递推公式如下:
(23)
同理,可以推导出稳定内动态向量值的递推公式:
(24)
上述对于不稳定内动态和稳定内动态的递推方向相反,由于和为第m-1次Picard迭代出的数值向量,当求第m次积分迭代时每一个递推公式中的积分求解结果均是数值形式,这样处理避免了求解复杂的解析解形式,极大减少了计算量。
当Picard迭代次数m增加到不稳定内动态和稳定内动态收敛时,最后的输出内动态为:
(25)
2.2.3 求解稳定逆ud
根据式(13)求稳定逆ud:
(26)
其中,。
综上近似稳定逆算法,对于复杂的过程动力学模型或者输出轨迹,内动态都可以通过增加积分迭代次数趋于收敛值。
3 仿真验证
将前述反应器模型(2)改写为式(5)的形式,则有:
(27)
其中,模型输入,状态变量,模型输出。稳定逆方法就是已知为期望的输出轨迹,找出输入轨迹ud和状态轨迹xd。
根据式(4)假设反应器的生产目标是要求产物浓度按照如下时变曲线变化:
(28)
为了求解进料流量和夹套温度调控的操作曲线即模型的稳定逆,根据式(8)稳定逆输出为:
(29)
其中,是过程的不稳定内动态,已知内动态就可以推导出稳定逆ud,内动态方程和积分方程如下:
(30)
(31)
对于该非线性内动态方程使用经典稳定逆很难求出解析解,Picard迭代积分也无法应用,通过利用笔者提出近似稳定逆算法结合Picard迭代积分可以求解得到收敛的内动态向量,在选取n=900个分段区间进行模型仿真,结果如图1所示。
由图1可知,随着Picard迭代次数m的不断增加,反应器产物浓度相对于生产浓度指标的误差在不断减少,这验证了笔者提出的近似稳定逆算法可以与Picard迭代法结合求解非线性稳定逆,通过模型的稳定逆输出即进料流量和夹套温度按照给定的操作曲线变化,可以完成对应的生产目标。进料流量u1和夹套温度u2的最佳操作曲线即Picard迭代次数为8次的近似稳定逆输出结果(图2)。
为考察分段区间数对于近似稳定逆算法的影响,对于内动态向量在选取n=900个和n=90两种分段区间数进行仿真对比,其中Picard迭代次数m=8,仿真结果如图3所示。
由图3可知,计算近似稳定逆算法(n=900)模型输出产物浓度y1和反应器温度y2相对于生产要求曲线的积分误差分别为0.613 3和15.829 2;而近似稳定逆算法(n=90)模型输出产物浓度y1和反应器温度y2相对于生产要求曲线的积分误差IAE分别为0.806 4和21.954 3。由此可知,分段数n越大,近似稳定逆的误差越小。综合考量误差和计算量,可以通过近似稳定逆算法得到一个满足生产过程要求的控制变量操作曲线。
4 结束语
针对生化过程中操作曲线的求取问题,提出一种非线性稳定逆的近似求解算法,对非线性稳定逆算法中求解内动态方程方法进行了改进,通过将内动态离散化处理,利用递推公式推导预览稳定逆中的积分方程的解,将原本求内动态解析解问题转为求数值向量解问题,这样不仅可以减少求解稳定逆的计算量,还可以与Picard迭代法结合实现非线性生化过程相应操作曲线的求解。最后通过仿真验证了所提算法的有效性。
需要说明的是,文中近似稳定逆误差大小与内动态跟踪时域内的分段数n有关,如何根据不同跟踪目标权衡跟踪精度和计算量,从而选取合适的分段数n是之后需要解决的问题。
参 考 文 献
[1]仇力,栾小丽,刘飞.基于正交余弦相似度的间歇过程操作曲线优化[J].化学工程,2019,47(1):65-69.
[2]FONSECA B G,SOLEDAD M,INES C R,et al.Bioconversion in batch bioreactor of olive-tree pruning biomass optimizing treatments for ethanol production[J].Biochemical Engineering Journal,2020,164(1):107793.
[3]THANAPIMMETHA A,SAISRIYOOT M,KHOMLAEM C,et al.A comparison of methods of ethanol production from sweet sorghum bagasse[J].Biochemical Engineering Journal,2019,151:107352.
[4]ANWESHA M,PURVI Z,RUSHIKA P,et al.Optimization of microbial fuel cell process using a novel consortium for aromatic hydrocarbon bioremediation and bioelectricity generation[J].Journal of Environmental Management,2021,298:113546.
[5]刘琳.精炼炉最佳吹氩曲线的制定与优化[D].沈阳:东北大学,2013.
[6]HUNT L R,MEYER G,SU R.Noncausal inverses for linear systems[J].IEEE Transactions on Automatic Control,1996,41(4):608-611.
[7]ZOU Q Z,DEVASIA S.Preview-based stable-inversion for output tracking of linear systems[J].Journal of Dynamic Systems,Measurement,and Control,1999,121(4):625-630.
[8]ZOU Q Z,DEVASIA S.Precision preview-based stable-inversion for nonlinear nonminimum-phase systems:The VTOL example[J].Automatica,2007,43(1):117-127.
[9]ZOU Q Z.Optimal preview-based stable-inversion for output tracking of nonminimum-phase linear systems[J].Automatica,2009,45(1):230-237.
[10]張有陵,刘山.基于最优状态转移的非因果稳定逆[J].控制理论与应用,2016,33(4):428-436.
[11]WANG H M,KIM K-S,ZOU Q Z.B-spline-decomposition-based output tracking with preview for nonminimum-phase linear systems[J].Automatica,2013,49(5):1295-1303.
[12]ROMAGNOLI R,GARONE E.A general framework for approximated model stable inversion[J].Automatica,2019,101:182-189.
[13]NIEMIEC M P,KRAVARIS C.Nonlinear model-state feedback control for nonminimum-phase processes[J].Automatica,2003,39(7):1295-1302.
(收稿日期:2022-10-20,修回日期:2023-07-13)
