基于改进蝙蝠算法的齿槽转矩优化
2023-12-25赵均业刘云攀吴林峰
赵均业, 刘云攀, 吴林峰
(三峡大学 电气与新能源学院,湖北宜昌 443000)
0 引言
随着永磁材料的性能日益增强,高性能控制系统里的永磁电机被使用频率越来越高。永磁同步电机跟传统的电励磁电机相比,它有重量较轻、体积较小、能量密度高、效率更高、功率因数高等优点。然而永磁体和电枢铁芯相互作用产生的齿槽转矩是永磁电机特有的问题,导致转矩波动,引起振动和噪声,影响系统的控制精度。因此减小永磁电机的齿槽转矩尤为重要。
关于齿槽转矩的抑制方法,已经有许多专家学者对其进行了研究。文献[1]在给出齿槽转矩表达式的基础上,提出了最佳的极弧系数可以有效削弱齿槽转矩,但会影响电机的空载电动势。采用转子斜极能有效降低齿槽转矩[2],但制造难度较大,成本较高。文献[3]提出对永磁体进行磁极偏心设置可有效削弱齿槽转矩,但会对每极磁通产生影响。文献[4]提出了一种相邻两极极弧系数不等的方法来削弱齿槽转矩。文献[5]研究了定子齿开辅助槽对齿槽转矩的影响,但其也会影响齿面磁场的饱和程度。
上述方法所进行优化的参数是单一结构,虽然可以使齿槽转矩的影响降低,但是也会出现转矩密度降低、齿槽损耗增大等问题。所以设置多个参数,对其同时优化可以更好地降低齿槽转矩和提升电机性能。文献[6-7]提出采用田口法实现对永磁电机的多目标优化,但是无法得到最优目标下各优化参数的精确值。文献[8]采用响应面法和最大-最小蚁群算法实现对V 型异步启动永磁同步的多目标优化,但是该算法收敛速度慢,易陷入局部最优。文献[9]采用粒子群算法实现对永磁直流电机的多目标优化,同样存在易早熟收敛的问题。相较于蚁群算法和粒子群算法,蝙蝠算法(BA)具有很高的适用性、较强的寻优性能以及较高的准确性和计算效率,但也存在后期易陷入局部最优的缺点[10],在算法中引入Lévy飞行可有效克服该缺点。
磁极偏心结构在极数与极槽最大公约数比值尽可能小的永磁电机中能对齿槽转矩达到最好的削弱效果,24 槽4 极电机满足上述极数与极槽最大公约数比值最小的条件。综合以上,本研究以24槽4 极表贴式永磁同步电机为例,首先通过田口法对永磁同步电机的定转子结构参数进行优化,筛选出对优化目标影响比重较大的参数,利用响应面拟合出齿槽转矩与相关优化参数的数学模型,最后通过具有Lévy 飞行特征的BA 对上述模型进行寻优,确定最小齿槽转矩下的参数最优值,从而削弱电机齿槽的转矩。
1 齿槽转矩的解析分析和电机的主要参数
齿槽转矩定义为电机不通电时的磁场能量W相对于位置角α的负导数,即
如果忽略饱和的影响,电枢铁芯的磁导率是无限的,所以它的电磁能力就可被简单地表述为来自于电机气隙与永磁体的电磁,即
式中:μ0是空气磁导率。气隙磁密沿永磁电机电枢表面的分布可近似表示为
式中:α为某一指定永磁体中心线和某一指定齿中心线之间的夹角;θ=0 位置设在磁极中心线上;Br为剩磁;hm为永磁体厚度;δ为有效气隙长度。将(3)式代入到(2)式中,得
对B2r(θ)和进行傅里叶分解,有
式中:αp为极弧系数;p为极对数;G0、Gn为相对气隙磁导平方的傅里叶分解系数;q为电枢槽数;θs0表示定子槽口宽度对应的弧度值。
若不考虑斜槽,齿槽转矩的表达式为
式中:LFe为电枢铁芯的轴向长度;R1为转子外径;R2为定子内径;n为使为整数的整数。
综合上述公式,选取极弧系数αp、气隙长度δ、磁极偏心距h、永磁体厚度hm、槽开口宽度bs0五个参数作为最终优化参数,电机初始参数如表1所示,在有限元中建立初始参数的电机模型,其齿槽转矩为268.67 mN·m。
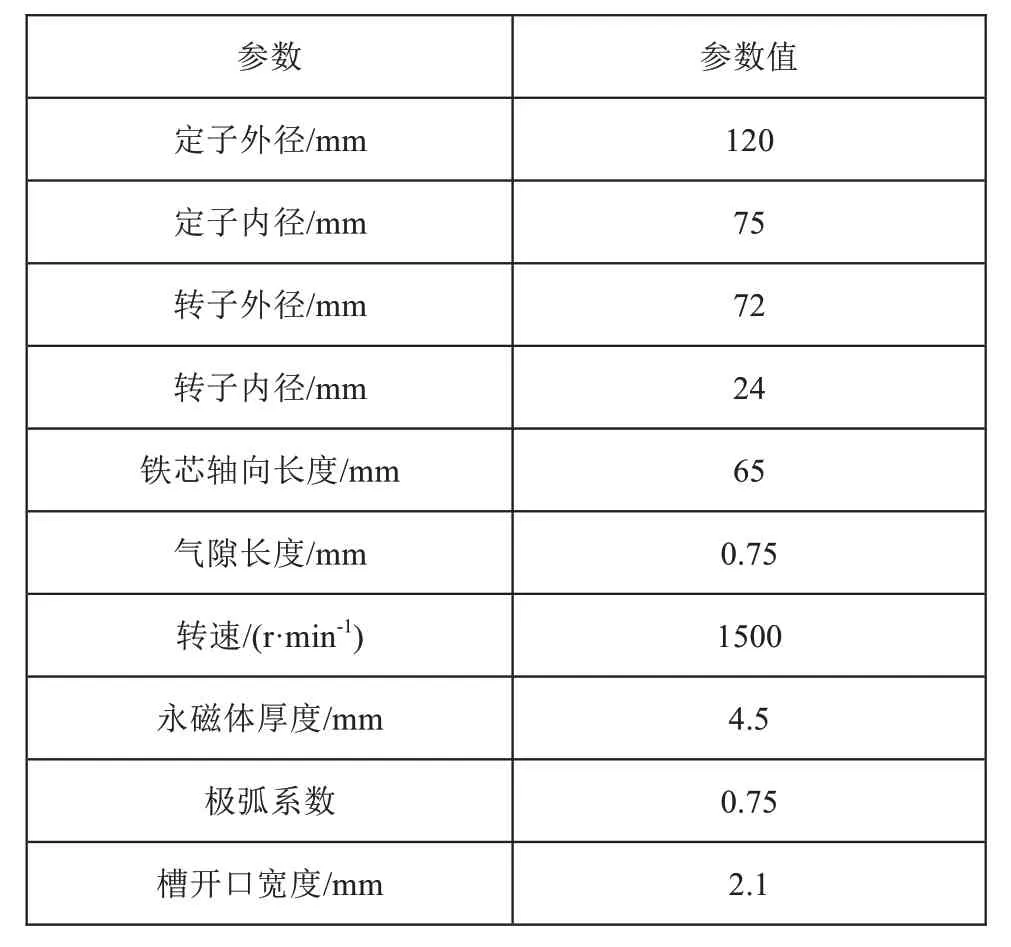
表1 PMSM主要尺寸参数
2 电机优化流程
2.1 基于田口法的正交实验设计及结果
田口法是为提高产品质量而提出的一种降低各种干扰影响的局部优化方法,对应于不同的行业,有时可以优化一些选项。利用正交仿真实验,大大减少试验次数,便于快速找到最优参数组合[11]。根据电机设计手册[12],优化参数的水平值如表2所示。

表2 优化参数及其水平值
由表2 的优化参数及其水平值,根据田口法的设计原理和正交表的构建原则来建立L25 正交表,仅需25次实验就可以实现多变量优化设计,大幅度降低了实验次数和计算程度[13]。通过有限元软件建立与每组实验参数水平相对应的25个电机模型,对每个电机模型进行仿真分析,其结果如表3所示。
2.2 实验结果数据分析
为了得到优化参数的变化对优化目标的影响及比重,对表3 的数据结果进行方差分析。首先根据式(13)得到优化目标有限元分析结果的平均值,计算结果为95.84 mN·m。
式中:m为优化目标的平均值;Si为第i次实验优化目标值。然后计算优化参数在不同水平值下优化目标的平均值,例如气隙长度δ在水平2 下优化目标平均值计算公式如式(14)所示。
通过采用上述计算方法,可以获得不同水平下齿槽转矩的平均值,具体情况可参见表4。极弧系数在水平5下齿槽转矩有最小的平均值,气隙长度、磁极偏心距、永磁体厚度在水平2 下齿槽转矩有最小的平均值,槽开口宽度在水平4 下齿槽转矩有最小的平均值。综合上述结果,田口法下齿槽转矩最小的参数组合为αp(5)δ(2)h(2)hm(2)bs0(4),即极弧系数取0.8、气隙长度取0.75 mm、磁极偏心距取11.75 mm、永磁体厚度取4.75 mm、槽开口宽度2.4 mm,在有限元软件中建立上述参数的电机模型并对其进行仿真分析,得到田口法优化后电机的齿槽转矩为68.69 mN·m。相比于初始参数电机的齿槽转矩,降低了74.43%,但通过表3 的仿真结果可以看出,田口法下优化组合得到的齿槽转矩还有进一步的优化空间。

表4 各优化参数在不同水平下优化目标的平均值
通过式(15)计算方差值(SS),可以更好地了解各个优化参数对于最终目标的影响程度。计算结果如表5所示。

表5 优化参数改变对优化目标的影响比重
式中:x为优化参数;Tcog,avg,x,l为优化参数x在水平l下优化目标的平均值。
由表5 得,气隙长度、磁极偏心距、永磁体厚度的变化会引起齿槽转矩较大的变化,为了得到更小的齿槽转矩,在田口法优化的基础上,选取这三个参数进一步优化。
2.3 构建响应模型
响应面法开始是在1951 年由Box 和Wilson 提出的一种解决多变量的统计方法,它的两种常见形式分别为:中央集成模式(Box-Behnken)与三水平模式(box-behnken)。与传统的中央集成模式(Box-Behnken)不同,box-behnken 模式的实施更加简单,因此选择三水平的Box-Behnken 模式。由表4 可知,气隙长度、磁极偏心距以及永磁体厚度分别在水平2 下齿槽转矩的均值最小,因此在水平2 左右选取对称的两个值作为下一步的水平数对应值,重新划定的参数水平如表6所示。

表6 优化参数水平
传统的反馈面模型一般采用完整的线性回归和二次多项式,其表达方式可以用式(16)~式(18)来表示。
线性型:
不含交叉项的二次项:
含交叉项的二次项:
式中:y为响应值;x为自变量;β为待定系数;ε为拟合误差。响应值具有明显的弯曲特性,因此选择一种包括二次项的多项式模型,它可以准确地反映出实际的状态。
模型建立后,利用Design-Expert.V8.0.6.1 软件自动生成17个实验点,通过有限元计算出每个实验点齿槽转矩的幅值,如表7所示,其中A、B、C分别代表气隙长度、磁极偏心距以及永磁体厚度。
根据表7中的实验数据计算得到的响应面模型如式(19)所示。
通过响应面软件的方差分析,发现齿槽转矩的响应面方程具有很好的拟合程度,具体可以参考表8(齿槽转矩响应面分析)。此外,还使用R-Squared来估算总的判定系数,得出的值达到了0.9873,说明齿槽转矩的响应面方程拟合程度较高。P和F表示模型的失拟项和检验系数,P一般小于0.001,可以认定所采用的样本点满足了模型的预期;而当F高于4 时,则可以认定所采用的模型达到了预期的准确性,即4.852。

表8 齿槽转矩响应面分析
3 含Lévy飞行特征的蝙蝠算法寻优
3.1 基本的蝙蝠算法
蝙蝠算法(BA)是根据蝙蝠利用回声定位觅食时,通过对种群中各蝙蝠的脉冲发射率、响度、速度、脉冲频率进行迭代更新而设计的一种群体智能算法[14]。每只蝙蝠的脉冲频率fi、位置xti以及速度vti迭代公式如下
式中:fi为蝙蝠i发出的脉冲频率;频率的最小值和最大值为fmin和fmax;β∈[0,1],是均匀分布的随机数;vti和xti分别表示蝙蝠i在t时刻的飞行速度和位置;x*代表当前最优位置。
在算法的局部搜索过程中,需在当前最优解附近进行随机游走产生新解[15]:
式中:ε∈[-1,1],是均匀分布随机数;At为蝙蝠在第t代响度的平均值。
同时,脉冲发射率和响度的迭代公式为
式中:rt+1i和At+1i分别表示第t+ 1 代的脉冲发射率和响度;r0i为初始脉冲发射率;d和γ为调节系数。
3.2 含Lévy飞行特征的改进蝙蝠算法
由于传统的BA 无法在解过程探索中发生突变,并且蝙蝠个体有一定概率陷入局部最佳位置,导致算法容易陷入局部最优;另外在迭代后期脉冲发射率趋于最大值[16],响度趋于零,若产生的优良新解因不满足条件而不能被接受,导致算法早熟。针对上述问题,本文引入Lévy飞行行为加强算法跳出局部最优和加强全局搜索能力[17]。
Lévy 飞行行为属于随机游走模型的一种。随机游走模型是描述一系列不稳定移动构成轨迹的数学形式,在任意维度的空间里,一个点在任意方向上移动随机步长的距离,然后重复这一步骤的过程。从数学角度看,Lévy 飞行特征的变化量服从Lévy 分布,是一种非正态随机过程[16]。在全局最优解的搜索过程中使用Lévy 飞行特征来替代蝙蝠个体对最佳位置的探寻,可以提升算法的寻优范围,最大程度地避免蝙蝠个体陷入局部最佳位置。改进蝙蝠算法速度和位置的更新如下
式中:Lévy(λ)为位置更新时步长服从Lévy分布的任意探寻向量;λ是[1,3]之间的尺度参数;⊗表示矢量运算。改进的蝙蝠算法流程如图1所示。
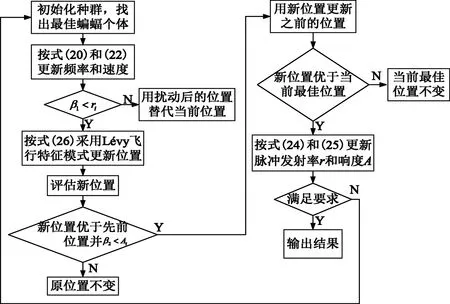
图1 改进的蝙蝠算法流程图
3.3 寻优结果对比
根据响应面划定的参数范围,结合式(19)分别利用基本的BA 和具有Lévy 飞行特征的BA 求解响应面模型的最小值,从而确定气隙长度、磁极偏心距以及永磁体厚度的精确值,其结果如表9 所示。基本的BA寻优后气隙长度取0.72 mm,磁极偏心距取11.73 mm,永磁体厚度取4.71 mm,齿槽转矩为52.74 mN·m;具有Lévy 飞行特征的BA 寻优后气隙长度取0.68 mm,磁极偏心距取11.69 mm,永磁体厚度取4.74 mm,齿槽转矩为47.21 mN·m。相较于优化前的齿槽转矩268.67 mN·m,基本的BA优化后其幅值降低了80.37%,具有Lévy 飞行特征的BA 优化后其幅值降低了82.43%,且相比于基本的BA 优化后的幅值降低了10.49%。因此,采用响应面法与具有Lévy 飞行特征的BA 相结合的优化方法,可准确计算出PMSM的最小齿槽转矩。

表9 齿槽转矩的优化结果
4 仿真分析
通过Maxwell 建立的有限元模型的应用,可以有效地验证上述方法的可行性,具体结果参见表10。通过基本BA 优化后的极弧系数取0.8、气隙长度取0.72 mm、磁极偏心距取11.73 mm、永磁体厚度取4.71 mm,槽开口宽度取2.4 mm,有限元验证结果为53.18 mN·m;通过具有Lévy 飞行特征的蝙蝠算法优化后的极弧系数取0.8、气隙长度取0.68 mm、磁极偏心距取11.69 mm、永磁体厚度取4.74 mm、槽开口宽度取2.4 mm,有限元验证结果为47.99 mN·m。优化后的齿槽转矩与有限元验证结果相近,说明建立的齿槽转矩的响应面模型比较准确。
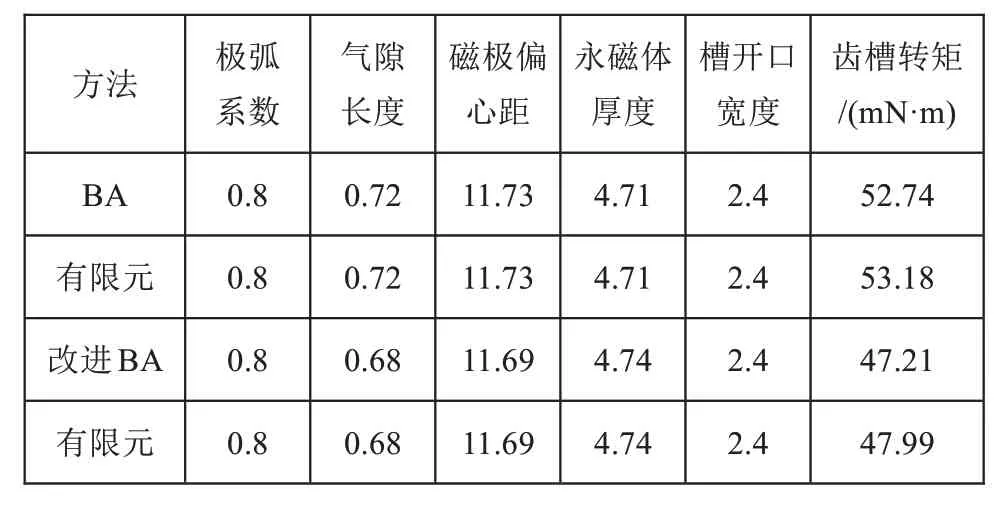
表10 有限元对比验证结果
转速达到1500 r/min 的情况下,通过优化电机参数,可以显著降低齿槽转矩,这是由于改变了气隙之间的磁导率,有效地改善了气隙磁路。通过削弱齿槽转矩,可以有效地减少转矩脉动,尤其是转矩趋于40 ms 稳定的情况下,这种脉动的程度可以明显降低,与初始转矩脉动相比,可以减少8.2%,从而使电机的运行状态更加稳定。在额定功率15 kW时电机的效率最高。经过有限元仿真分析,电机的初始效率从94.2%最终上升到95.8%,优化后齿槽转矩降低的同时,电机的效率也得到了提升。
5 结论
通过有限元仿真验证其有效性,优化后电机的齿槽转矩明显降低,电机的转矩脉动也随之减小,使电机的运行性能得到提升,同时电机的效率也有所提高。但针对单一目标的优化,无法保证其他性能最优,具有一定的局限性,对电机的多目标优化还需要进一步研究。