基于多尺度残差网络的域适应轴承故障识别方法*
2023-12-20赵志宏孙美玲窦广鉴
赵志宏,孙美玲,窦广鉴
(1.石家庄铁道大学 信息科学与技术学院,河北 石家庄 050043;2.石家庄铁道大学 省部共建交通工程结构力学行为与系统安全国家重点实验室,河北 石家庄 050043)
0 引 言
在现代工业过程中,机械设备日益向自动化和大型化方向发展,机械设备的故障诊断越来越受到重视。
滚动轴承是旋转机械的核心部件,其不同载荷下、不同位置、不同直径的故障,可能会对机械设备的性能、稳定性和寿命产生巨大的影响[1]。因此,对轴承进行故障诊断具有重要的意义。
近些年,轴承故障诊断逐渐成为一大研究热点,有大量学者针对轴承故障诊断展开了研究,并且成果颇丰。基于机器学习的故障诊断方法主要包括支持向量机(support vector machine, SVM)、反向传播(back propagation,BP)神经网络、人工神经网络(artificial neural network, ANN)以及概率神经网络等。虽然这些方法取得了不错的结果,但是特征提取过程通常依赖于人工经验和专家知识,而且浅层神经网络无法有效提取出一些微小故障特征。
深度学习(deep learning, DL)[2]可以采用逐层贪婪学习机制,从原始数据中自动提取深层次特征[3],很好地解决了上述问题。丁雪等人[4]将多尺度卷积神经网络和注意力机制相结合,更加充分地提取了特征,实验表明该模型具有较强的鲁棒性。杨慧等人[5]使用双向门控循环神经网络(bidirectional gated recurrent neural network,BiGRU)和自注意力机制,对滚动轴承进行了故障诊断。赵志宏等人[6]设计了双向长短词记忆模型(bi-directional long short-term memory, BiLSTM),该网络可自动提取轴承的原始振动信号特征,从而进行轴承故障诊断。赵凯辉等人[7]设计了Inception模型,并提取了多尺度特征信息,设计了BLSTM网络,赋予特征信息时间依赖性,得到了较高的故障诊断精度。ZHANG Jiang-quan等人[8]将轴承的原始振动数据转换为二维灰度图像,将其作为卷积神经网络的输入,从而成功地进行了轴承故障诊断。
这些传统深度学习方法要求训练数据和测试数据的分布是相同的,并且要有足够的带标签训练数据对模型进行训练;而在实际生产中,数据的采集通常是在不同转速和不同负载下进行的,因此,很难获得分布相同的数据。
迁移学习(TL)旨在利用源域的先验知识以增强模型在目标域的性能[9],其可以很好地解决以上问题,在自然语言处理、计算机视觉等许多研究领域都有很好的应用效果[10]。域适应方法是迁移学习中一种常见的方法,其主要思想是首先利用深度神经网络提取故障特征,然后加入自适应层来减小源域和目标域之间的特征分布距离[11]。因此,精确测量源域和目标域的特征分布距离并使分布距离最小变得极为重要。
沈长青等人[12]利用ResNet50网络和多尺度特征提取器,提取了源域和目标域特征,通过计算它们的最大均值差异来学习域不变特征,从而得到泛化性能较好的故障诊断模型。雷亚国等人[13]使用堆叠多级残差单元的残差网络提取特征,将最大最小距离(max min distance,MMD)和伪标记学习相结合来减小域间分布差异,得到了较好的故障诊断效果。SHAO Jia-jie等人[14]使用多内核MMD (multiple-kernel MMD, MK-MMD)和域混淆函数作为损失函数,进行了迁移学习轴承故障诊断。LIU Yong-zhi等人[15]使用Wasserstein距离作为度量方法来适应源域和目标域,最终进行了变工况下的轴承故障诊断。SUN Bao-chen等人[16]提出了一种简单且高效的无监督域适应方法-相关对齐(CORrelation alignment, CORAL),该方法使用线性变换对齐目标域和源域特征的协方差,不需要任何目标标签进行迁移学习;但是该方法依赖线性变换,不是端到端的训练。因此,SUN Bao-chen等人[17]对CORAL算法进行了拓展,使用非线性变换,提出了Deep CORAL,并将其应用到深度神经网络中。
笔者针对不同工况下滚动轴承振动信号数据分布差异大、故障特征提取不全面、有标签数据获取困难等问题,对特征提取网络和域适应度量方法进行改进,提出一种基于多尺度残差网络的域适应轴承故障识别方法。
笔者在残差网络中加入多尺度残差块,并采用空洞卷积来增大感受野,从而提取出多个不同尺度的特征信息,并避免梯度消失和梯度爆炸问题;此外,对CORAL进行改进,提出一种新的域适应方法-对数相关对齐(logCORAL),使用logCORAL进行源域和目标域之间的特征分布对齐,提取域不变特征。
1 相关理论
1.1 域适应
域适应(DA)是迁移学习中一种常用方法,用于源域和目标域任务相同但是数据分布不同的情况。其基本思想是在保持源域任务精度的前提下,缩小表示空间上源域与目标域的特征分布距离。
域适应示意图如图1所示。
1.2 残差网络
深度神经网络模型通常会加入大量的卷积层和池化层,使模型拥有大量的参数,随着网络层的增加会出现网络退化、梯度爆炸等问题。残差网络(residual neural network,ResNet)[18]采用跳跃连接的方法,可以避免这些问题。
浅层残差网络中的残差块结构如图2所示。
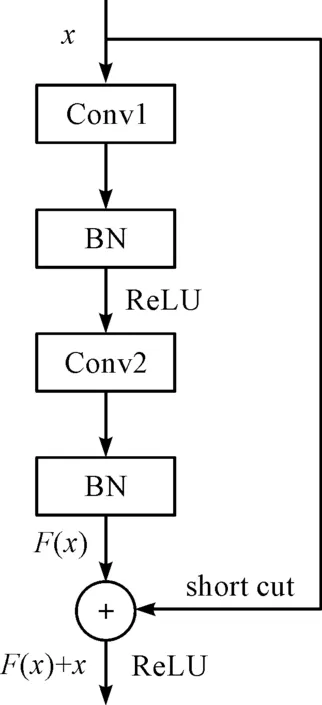
图2 残差块结构图Fig.2 Residual block structure diagram
残差块由short cut、卷积层(Conv)、批归一化层(BN)和ReLU激活函数组成。其中,x是残差块的输入。设F(x)为卷积路径的非线性函数,则残差块的输出可以用下式来表示:
y=F(x)+x
(1)
残差表示为F(x)=y-x,残差网络的训练目标是使残差F(x)的值尽可能为0,进而防止随着网络加深而产生精度下降的现象。
1.3 灰度图像
轴承的灰度图像只包含亮度信息,可以有效避免模型学习到一些不必要的信息,从而提高模型的泛化能力。因此,笔者将轴承振动信号转换为灰度图像,将其作为故障诊断模型的输入。
具体的转换方法如下:
步骤1。将提取的轴承一维振动信号样本转化为L×L的二维矩阵A,公式如下:
A(e,f)=G(L×(e-1)+f)
(2)
式中:G()为二维矩阵转换函数;A(e,f)(e,f∈(0,L])为转换的矩阵中第e行第f列元素的值。
步骤2。将二维矩阵A转化为灰度图像D。具体操作是将二维矩阵进行归一化处理,即将其中的值压缩到(0,1)区间内;再乘以255,转化为二维灰度图像的像素值,公式如下:
(3)
式中:D(e,f)(e,f∈(0,L])为轴承振动信号灰度图像矩阵中第e行第f列的像素值;max(A)为矩阵A中元素的最大值;min(A)为矩阵A中元素的最小值。
1.4 对数相关对齐
CORAL损失函数计算方式如下:
(4)
CT和CS计算公式如下:
(5)
(6)
然而大量实验表明,CORAL在轴承故障诊断中的表现不是很好,不能很好地对齐源域和目标域的特征。所以笔者提出了一种新的域适应方法-对数相关对齐(logCORAL)。
在计算方面,取对数之后求导更加容易,因此反向传播速度更快,训练速度也会提高。
logCORAL的损失计算公式如下:
(7)
2 多尺度残差网络诊断模型
笔者设计的故障诊断模型主要包括数据预处理模块、特征提取模块和故障识别模块。源域和目标域之间是参数共享的。
模型结构图如图3所示。
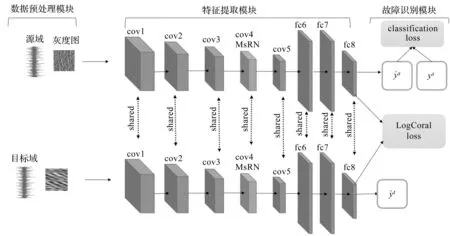
图3 故障诊断模型结构图Fig.3 Structure diagram of fault diagnosis model
故障诊断模型包括:
1)数据预处理模块。在数据预处理模块中,将轴承故障原始信号转换为灰度图像,并将灰度图像作为模型的输入;
2)特征提取模块。特征提取网络由卷积层、最大池化层、多尺度残差块以及全连接层组成。
特征提取网络结构图如图4所示。
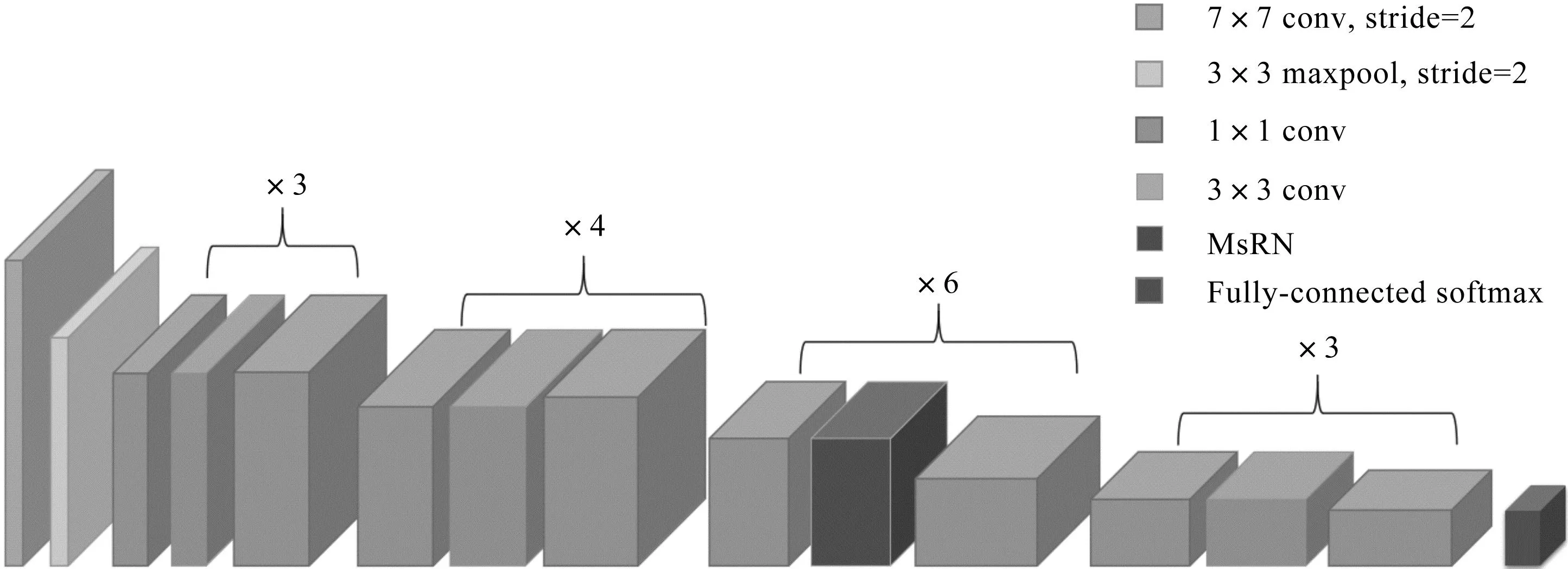
图4 特征提取网络结构图Fig.4 Feature extraction network structure diagram
由于滚动轴承信号具有非线性且不平稳的特点,传统的残差网络内部采用单一尺寸的卷积核,对轴承特征的提取不够精准。
为提取更加丰富的特征信息,且有效避免深层网络结构的梯度消失问题,笔者对残差网络进行了改进,设计一种多尺度残差块,使用空洞率为2的空洞卷积来增大感受野。
多尺度残差网络(MsRN)结构图如图5所示。
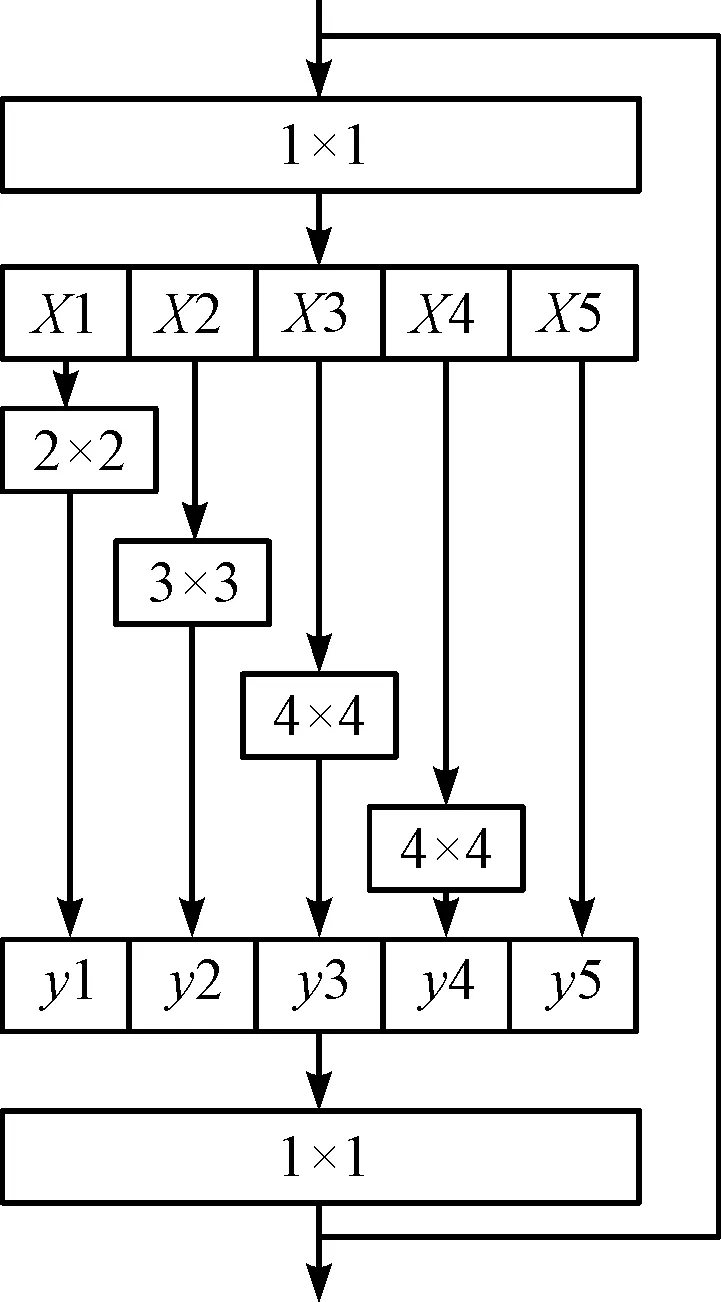
图5 MsRN结构图Fig.5 Structure diagram of MsRN
MsRN内部有4个不同大小的卷积核(2×2,3×3,4×4,4×4),可以从不同尺度的卷积核中学习轴承的局部特征;并将每个卷积核的输出通过concat融合在一起,然后传到残差结构中的1×1卷积层;
3)故障识别模块。笔者使用交叉熵损失作为源域分类损失,利用logCORAL作为域间损失来最小化域之间的特征分布差异;将源域的交叉熵损失和域间损失共同作为训练的损失函数。
因此,损失函数J的表示方法如下:
J=Jc+αJd
(8)
式中:J为总的损失函数;Jc为源域分类器上的交叉熵损失;α为平衡超参数;Jd为logCORAL损失。
笔者使用随机梯度下降法(stochastic gradient descent,SGD)作为优化器,通过反向传播更新参数,当达到一定的迭代次数时,停止训练,得到此时的训练模型。
3 故障诊断流程
基于多尺度残差网络域适应的轴承故障诊断主要包括以下3个步骤:
步骤1。采集不同工况下的轴承原始振动信号数据,将轴承振动信号按照长度为1 024、步长为8进行抽样,并将其转化为尺度为32×32的二维灰度图像,作为源域数据和目标域数据(故障类型有10类,每类有700个样本,一共有7 000个样本);
步骤2。将预处理后得到的源域和目标域数据同时输入到特征提取网络中,进行故障特征提取,将源域特征输入到分类器中,使得模型在源域数据上有较好的精度,由分类器得到源域数据的交叉熵损失(cross entropy)。利用域适应方法对提取出的两个域的特征进行特征分布对齐,这里的域适应方法使用的是logCORAL。训练中总的损失函数J的表示方法如式(8)所示;
步骤3。将目标域测试样本输入到已经训练好的故障诊断模型中,得到模型最终的分类精度。
故障诊断流程图如图6所示。
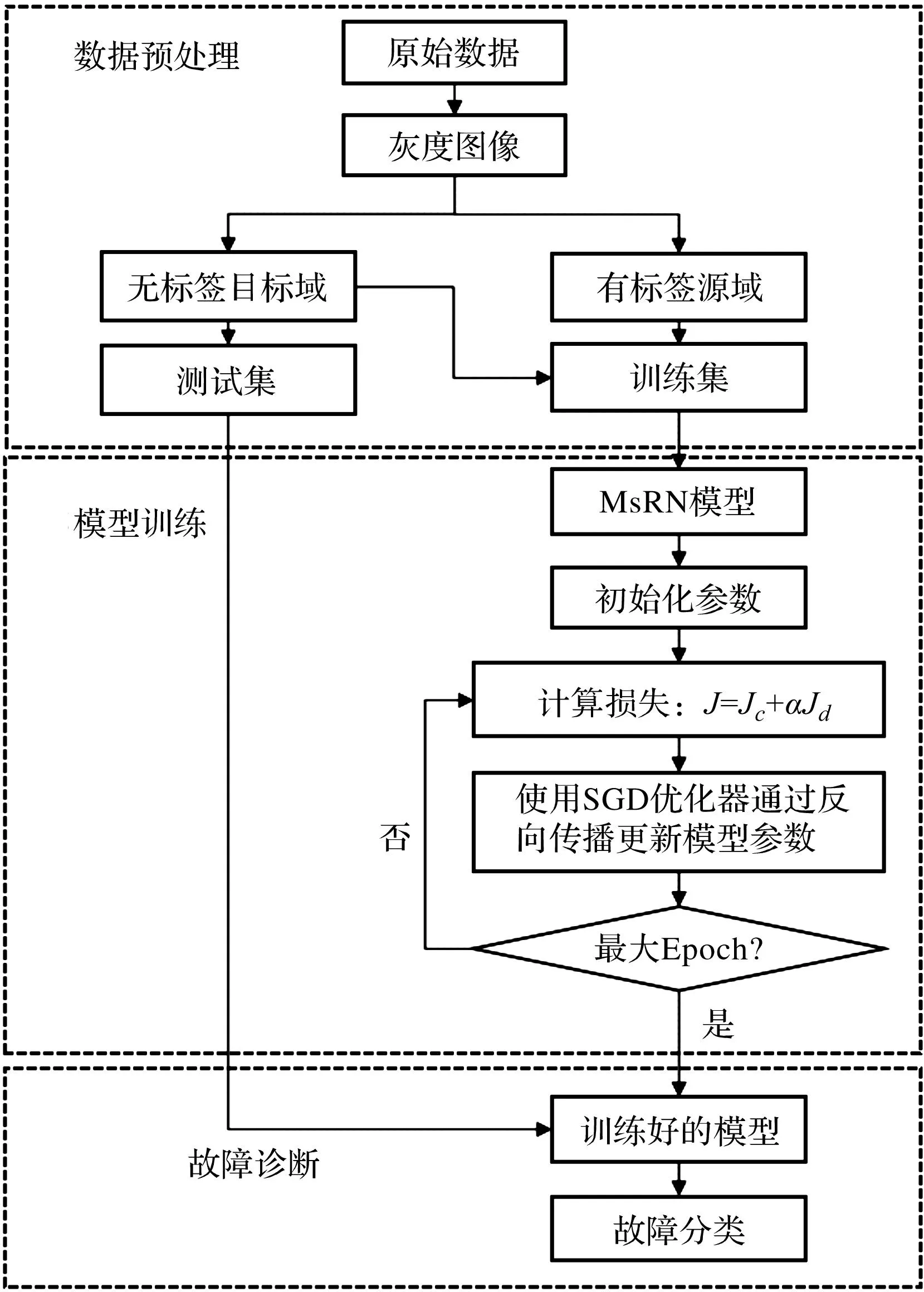
图6 故障诊断流程图Fig.6 Fault diagnosis flowchart
4 实验及结果分析
4.1 故障诊断数据集
笔者选用CWRU轴承公开数据集进行变工况下的迁移实验,并与其他方法进行对比实验。
CWRU轴承数据集的试验台如图7所示。
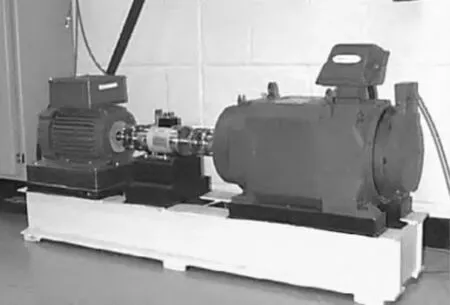
图7 美国凯斯西储大学轴承试验台Fig.7 Bearing test bench of CWRU
轴承有4种状态,分别为内圈故障(IRF)、外圈故障(ORF)、滚子故障(RF)和正常状态(N)。采样频率为12 kHz。每种故障类型存在0.533 4 mm,0.355 6 mm和0.177 8 mm这3种不同的损伤直径,共有10种轴承状态。故障数据采集自4种不同的负载条件,分别为0 hp、1 hp、2 hp和3 hp。
轴承实验运行的负载、转速与工况信息如表1所示。

表1 CWRU数据集工况信息
笔者将不同工况视为不同的迁移任务,共进行12个迁移任务的实验:0 hp→1 hp,0 hp→2 hp,0 hp→3 hp,1 hp→0 hp,1 hp→2 hp,1 hp→3 hp,2 hp→0 hp,2 hp→1 hp,2 hp→3 hp,3 hp→0 hp,3 hp→1 hp,3 hp→2 hp。例如0→1表示源域为0 hp工况下向目标域为1 hp下进行迁移。
为了更好地突出轴承的特征,减少模型的复杂度,提高模型的训练速度和准确度,并且提高模型的泛化能力,笔者对轴承数据集进行了预处理,将其转化为二维灰度图像。
不同工况轴承振动信号的二维灰度图如图8所示。
从图8可以看出:灰度图可以将轴承的10种状态很好地表现出来。

图8 CWRU轴承数据的二维灰度图Fig.8 2D grayscale image of CWRU bearing data
4.2 实验一:变工况对比实验
滚动轴承在不同的负载条件下工作,会造成振动信号分布不一致。为了验证基于多尺度残差网络域适应的轴承故障诊断方法的诊断准确性以及在不同工况下的迁移学习能力,笔者对其进行不同工况条件下的故障诊断实验。
该实验使用的轴承振动数据是在设备驱动端采集到的。数据集的详细信息如表2所示。
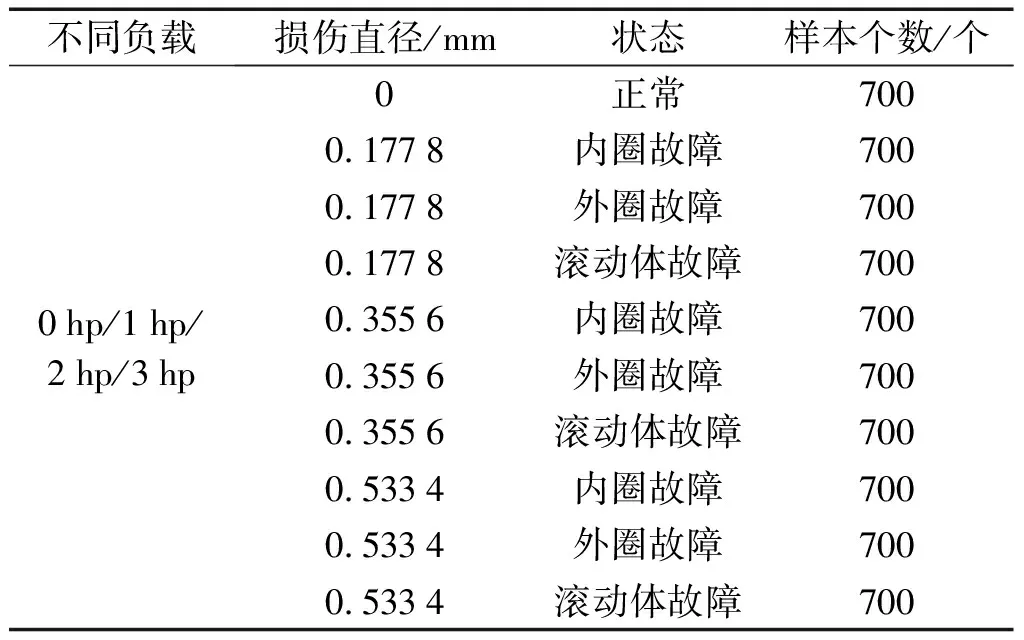
表2 不同工况下的故障类型
为了验证基于多尺度残差网络域适应的轴承故障诊断模型在变工况轴承故障诊断中的性能和优势,笔者将该模型与4种不同的方法进行对比,分别为联合分布适应模型(joint distribution adaptation, JDA)[19]、CORAL、MMD[20]221以及未使用迁移学习的CNN[20]221。
JDA为传统迁移学习方法,通过将源域和目标域数据映射到一个共同的高维再生核希尔伯特空间,以此来减小两个域之间的距离,以此来进行特征对齐。CORAL使用的特征提取网络为MsRN网络,域适应度量方法使用的是交叉熵损失和CORAL。MMD方法和未使用迁移的CNN方法利用的是文献[20]的实验结果。其中,特征提取网络均使用CNN,CNN由5个卷积层、1个池化层、2个全连接层和1个输出层组成;此外,前者使用MMD损失来进行领域分布对齐,后者使用交叉熵损失作为分类损失。
不同模型12个迁移任务的故障诊断准确率如表3所示。
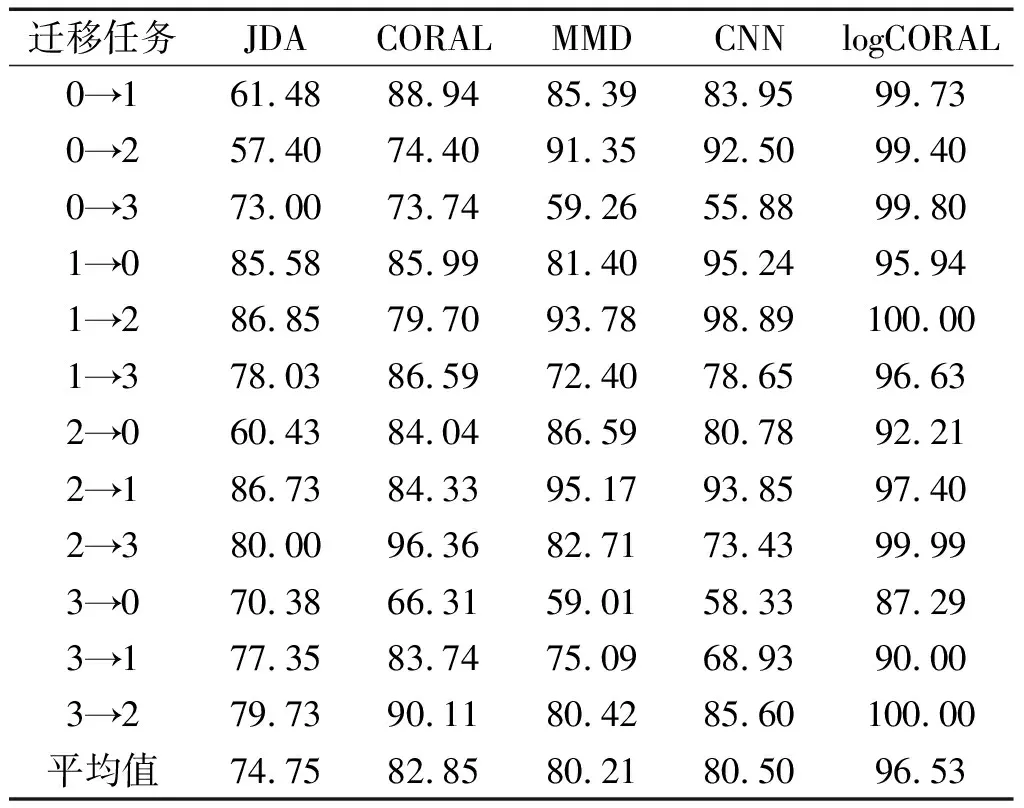
表3 不同方法的变工况故障诊断结果(%)
从表3可以看出:JDA通过将轴承的原始振动信号映射到高维空间中,以最小化两个域的特征分布距离,迁移效果最差,故障诊断准确率最低,仅为74.75%。CORAL、MMD、CNN和logCORAL方法使用深度神经网络从轴承故障样本中学习特征,可以有效避免有用信息数据的丢失,所以利用深度学习方法提取出的特征要优于传统方法提取出的特征。
另外,与迁移学习方法CORAL相比,logCORAL方法在12个迁移任务中都得到了更好的诊断效果,准确率达到了96.53%,而CORAL方法仅有82.85%的准确率。说明该方法可以比CORAL学习到具有更高相关性的故障特征,最大程度减小了目标域和源域的特征分布差异。
以上结果表明,该模型可以有效地提取出更多有用的特征,并且使得源域和目标域之间的分布差异最小,证明了该方法的迁移有效性以及较其他方法的优越性。
4.3 实验二:消融实验
为了验证整个模型的有效性以及MsRN和logCORAL各自的必要性,笔者选取0 hp迁移至1 hp、2 hp和1 hp迁移至0 hp、2 hp这6种工况,进行变工况下的消融实验。消融实验中,笔者将logCORAL-MsRN方法分别与CORAL-MsRN、CORAL-ResNet50、logCORAL-ResNet50等进行对比。
消融实验故障诊断结果如表4所示。
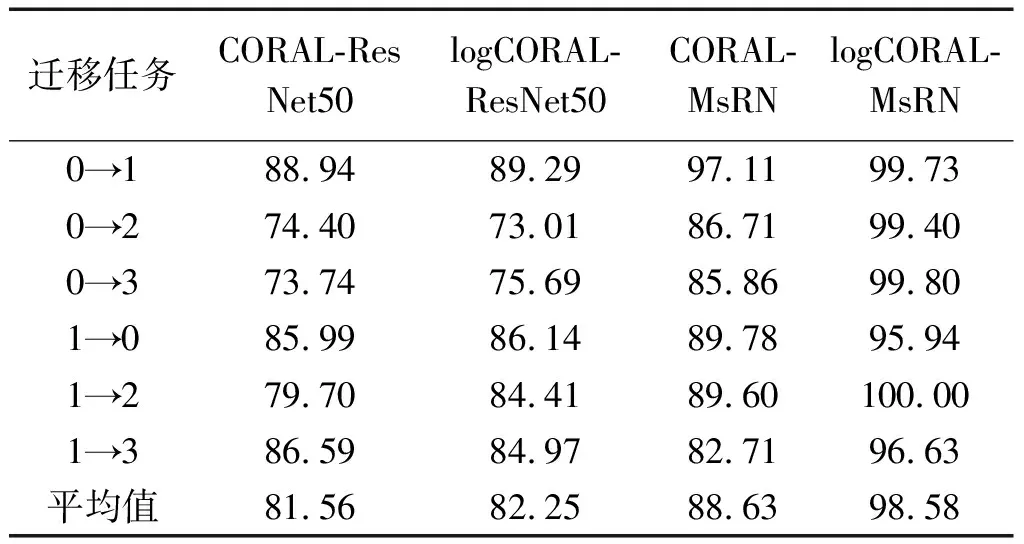
表4 CWRU试验台的消融实验故障诊断结果(%)
从表4可以看出:CORAL-ResNet50的准确率最低,为81.65%,说明笔者设计的模型整体在轴承故障诊断中起了正向作用;logCORAL-ResNet50的准确率为82.25%,低于logCORAL-MsRN的准确率98.58%,说明笔者采用的多尺度残差块可以提取出多个不同尺度的故障特征,并且引入空洞卷积之后增大了感受野,使得提取出的特征更加全面和丰富,且具有更高的相关性,有助于特征更好地对齐;CORAL-MsRN的准确率为88.63%,低于logCORAL-MsRN,说明改进后的域适应度量方法logCORAL比CORAL的效果要好,可以更有效地减小目标域和源域之间的特征分布差异。
总之,通过消融实验验证了logCORAL-MsRN方法整体的有效性,以及特征提取网络MsRN和域适应度量方法logCORAL各自的必要性。
4.4 实验三:可视化实验
为了更直观地验证logCORAL-MsRN方法的优越性,笔者随机选取1 hp→2 hp迁移任务,利用t-SNE算法对不同模型进行特征可视化。
可视化结果如图9所示。
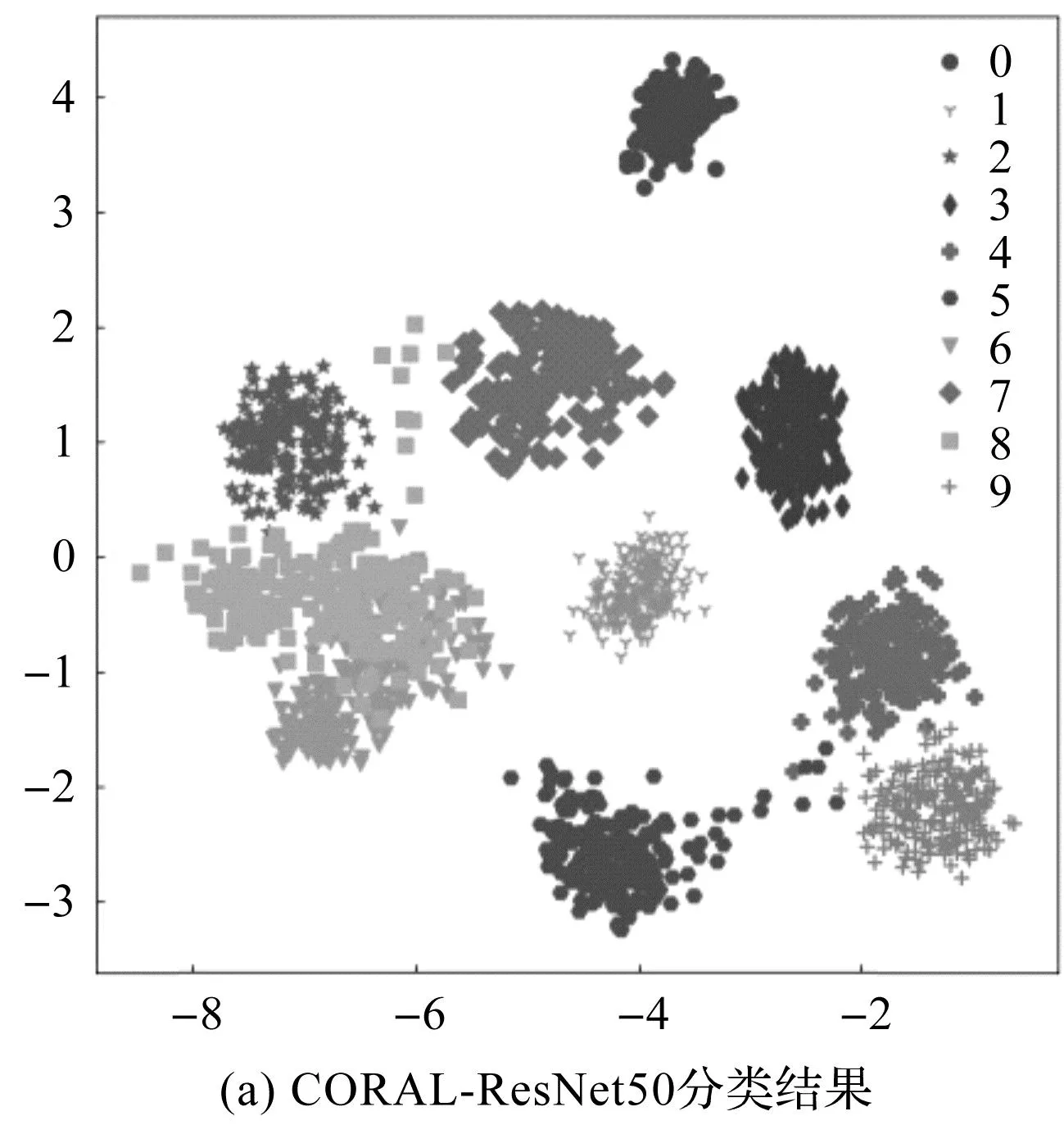

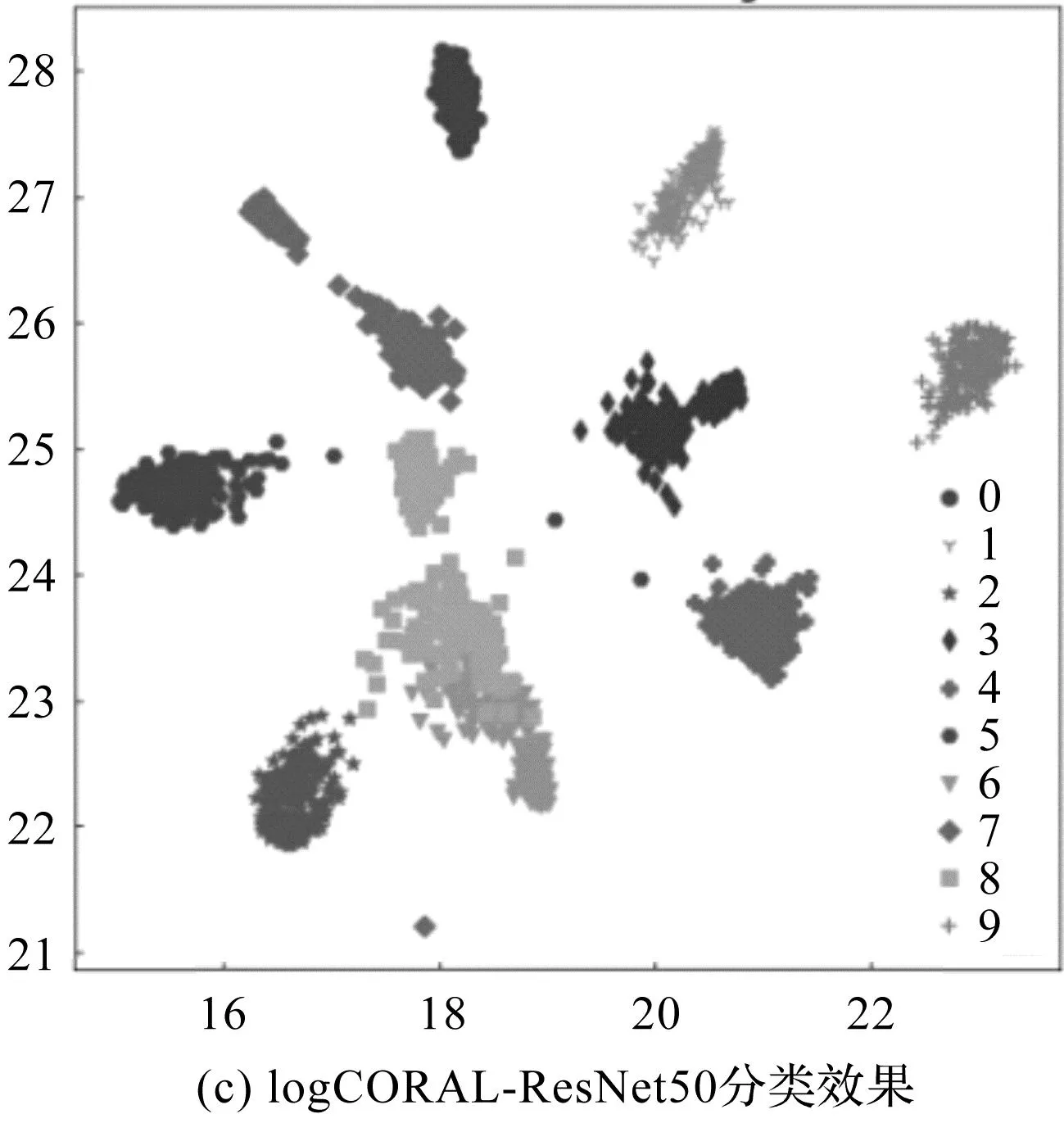


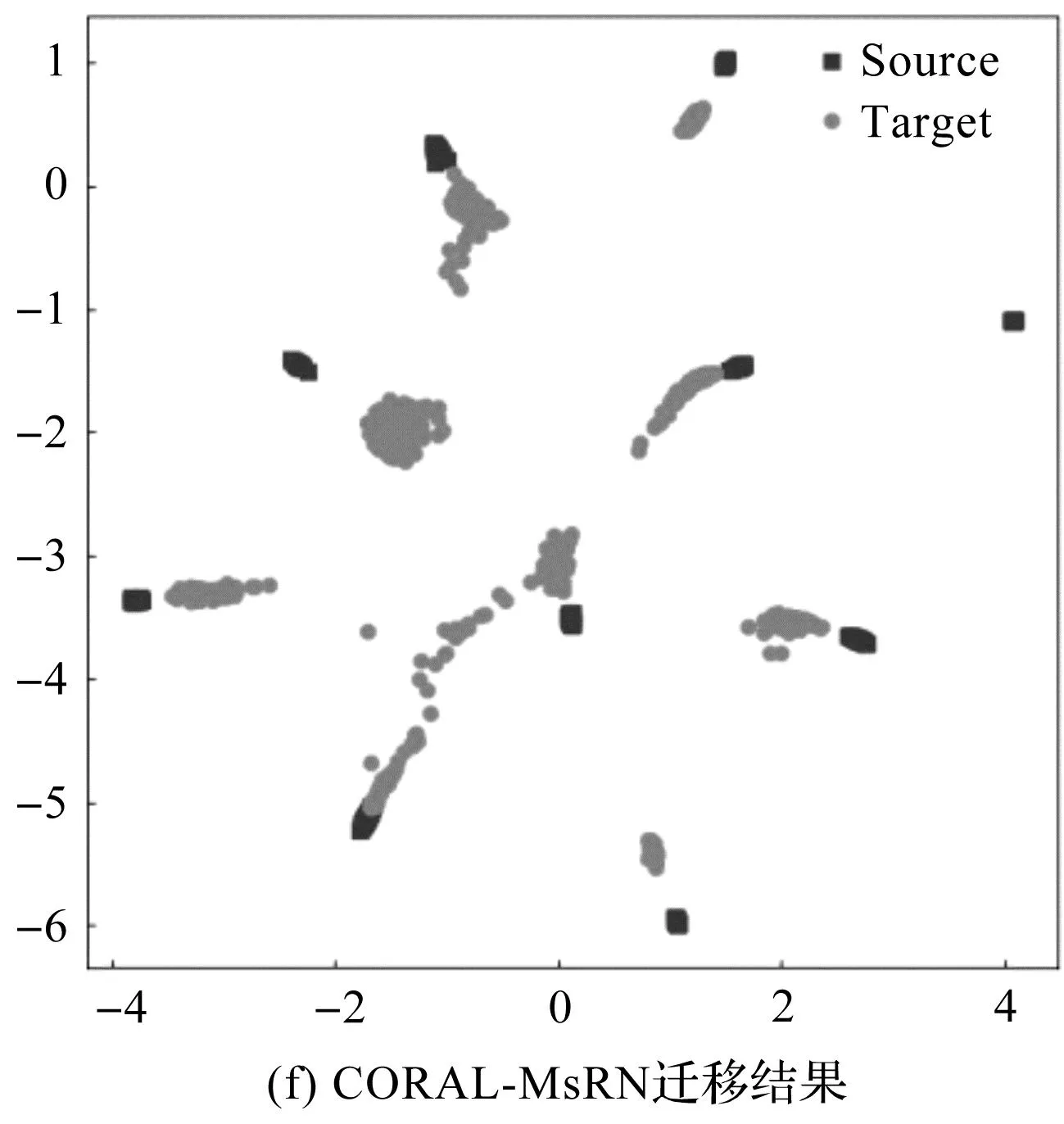
图9中包含CWRU源域和目标域的10种故障类型,角标Source表示源域数据,Target表示目标域数据。
从图9(e)、图9(f)可以看出:使用多尺度残差网络作为特征提取网络,CORAL作为域适应度量方法,无法将特征准确分类;并且源域和目标域样本之间距离较远,无法很好地进行特征对齐,因此准确度较低;
但从图9(g)、图9(h)可以看出:logCORAL-MsRN方法使用多尺度残差网络作为特征提取网络,logCORAL作为域适应度量方法,经过深度迁移学习可以将相同类别的样本聚合在一起,将不同类别的样本分散开来;同时,源域和目标域样本之间距离很近但没有重合,证明该方法的分类和迁移效果较好,因此准确度较高。
图9(a)、图9(b)使用ResNet50作为特征提取网络,CORAL作为域适应度量方法。图9(c)、图9(d)使用ResNet50作为特征提取网络,logCORAL作为域适应度量方法。经过迁移训练之后图9(c)、图9(d)相同样本之间聚合较为紧密,分类效果和特征对齐效果都比图9(a)、图9(b)好[21]。
由于图9(c)、图9(d)和图9(g)、图9(h)的故障诊断效果明显优于图9(a)、图9(b)和图9(e)、图9(f),所以证明logCORAL域适应度量方法是有效的,而且比CORAL更适合用于域适应轴承故障诊断。又因为图9(e)、图9(f)和图9(g)、图9(h)的故障诊断效果比图9(a)、图9(b)和图9(c)、图9(d)要好,表明多尺度残差网络是有效的,具有强大的特征提取能力,可以充分提取出源域和目标域的域不变特征。
5 结束语
为了提高轴承故障诊断的分类精度,笔者提出了一种基于多尺度残差网络的对数相关对齐(logCORAL-MsRN)的域适应轴承故障识别方法(模型),并使用CWRU轴承数据集对该方法的有效性进行了实验验证。
研究结果表明:
1)多尺度残差网络MsRN可以提取出丰富的轴承故障特征,解决了特征提取不充分的问题,且有效避免了深层神经网络结构中的梯度消失问题;
2)对CORAL算法进行改进,提出了一种域适应方法logCORAL。与CORAL相比,logCORAL可以有效减小域间差异,更好地对齐源域和目标域之间的特征分布;
3)在不同工况条件下,与JDA、CORAL、MMD以及未使用迁移的CNN相比,logCORAL模型迁移故障诊断效果更好,平均准确率达到了96.53%。而JDA、CORAL、MMD和CNN的准确率分别为74.75%、82.85%、80.21%、80.50%。
在后续的工作中,笔者将在该研究内容的基础上对跨设备的轴承故障诊断展开研究,并通过不断优化模型得到更高的故障诊断准确率。
