电动汽车扭矩滤波控制策略研究
2023-12-19王坤俊欧阳智文健峰杨杰君
王坤俊, 欧阳智, 卢 雄, 文健峰, 杨杰君
(中车时代电动汽车股份有限公司, 湖南 株洲 412007)
扭矩控制作为电动汽车整车控制的重要组成部分,对整车的动力性和经济性有着重要影响[1-3]。扭矩滤波在扭矩控制中发挥着至关重要的作用,既要快速响应驾驶员扭矩请求,又要保证扭矩变化平滑[4-5]。扭矩由电机经过与之匹配的减速器降速增扭后传递到车轮,当驱动工况与制动工况相互切换时,减速器齿轮传动的啮合面会发生变化,由于齿轮间隙的存在,主动轮会经过一个短暂的加速,然后撞击到啮合面,从而产生较大的冲击和噪声,甚至造成车辆抖动[6-7]。
本文提出一种扭矩滤波控制方法,既能迅速响应驾驶员在各种操作工况下的需求扭矩,保证车辆动力性,又能在车辆驱动工况与制动工况相互切换时,有效降低减速器齿轮间隙带来的打齿冲击和噪声,从而提升驾驶舒适性。
1 扭矩滤波控制策略
1.1 系统架构
电动汽车通常将整车控制器作为整车扭矩控制的核心[8-9],整车控制器采集挡位、加速踏板、制动踏板等硬线输入信号,接收电机控制器反馈扭矩、转速信息,识别驾驶员操作意图,计算驾驶员需求扭矩,经过扭矩滤波处理后得出电机目标扭矩,再由电机控制器实现该目标扭矩的响应,从而实现车辆扭矩控制[10]。扭矩滤波主要包括扭矩上升率限制、扭矩下降率限制、扭矩过零处理,以控制扭矩变化的快慢。系统架构如图1所示。
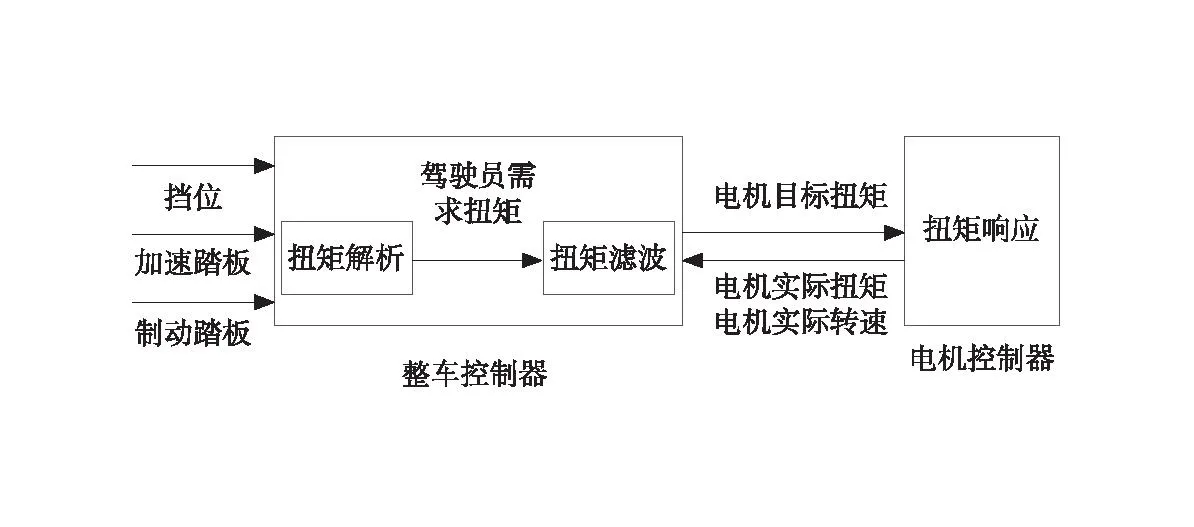
图1 系统架构
1.2 扭矩上升率限制
当驾驶员需求扭矩大于电机目标扭矩时,表明有加大车辆驱动扭矩或减小车辆制动扭矩的意图。为保证扭矩变化平滑,需要限制扭矩上升率。分为以下几种工况限制:
1) 电机目标扭矩为正(驱动扭矩),且蠕行功能触发。驾驶意图为加大蠕行驱动扭矩,扭矩上升率为蠕行扭矩上升率,此上升率通常为一个较小的定值,可确保车辆平稳缓慢行驶。
KR=CC1
式中:KR为扭矩上升率;CC1为蠕行扭矩上升率常数,本文取值300 N·m/s。
2) 电机目标扭矩为正(驱动扭矩),且蠕行功能未触发。驾驶意图为加大踏板驱动扭矩,扭矩上升率为踏板驱动扭矩上升率,此上升率跟驾驶员需求扭矩与电机目标扭矩的差值、电机转速有关。驾驶员需求扭矩与电机目标扭矩的差值越大,上升率越大,以快速响应驾驶员扭矩请求;电机低转速时上升率较小,可确保车辆平稳起步,电机转速较高后,加大上升率,提高车辆动力性。由于无法用数学表达式描述,本文通过TD和n二维查表得到踏板驱动扭矩上升率,根据实车标定情况调整,具体数值见表1。
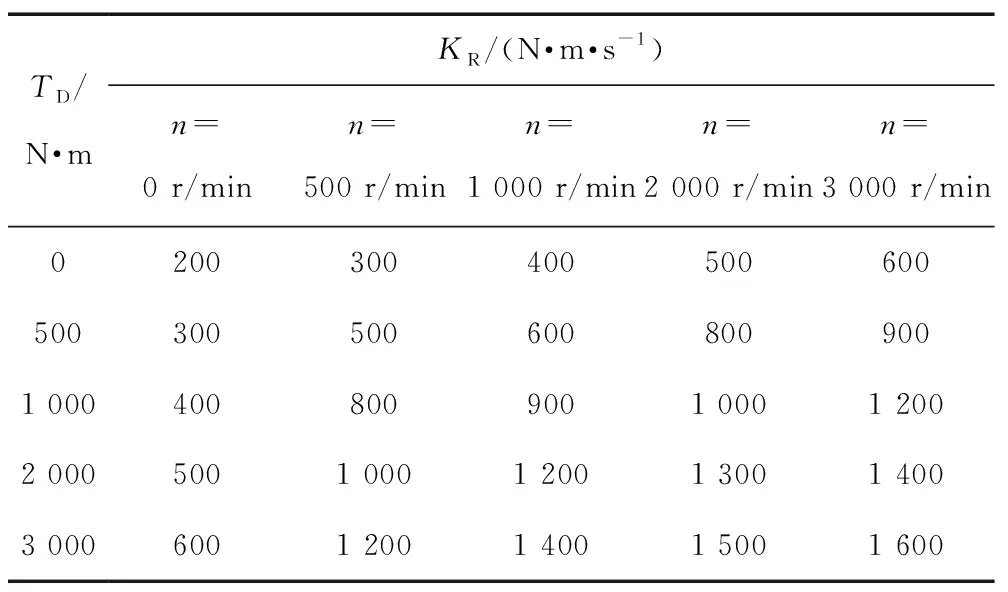
表1 踏板驱动扭矩上升率
KR=f(TD,n)
式中:TD为驾驶员需求扭矩与电机目标扭矩的差值;n为电机转速。
3) 电机目标扭矩为负(制动扭矩),且驾驶员需求扭矩为负(制动扭矩)。驾驶意图为减小制动扭矩,制动扭矩的数值实际上需要减小,扭矩上升率为制动扭矩上升率。此上升率根据驾驶员需求扭矩与电机目标扭矩的差值得出,驾驶员需求扭矩与电机目标扭矩的差值越大,上升率越大。
KR=max(Kmin1,f1·TD)
式中:Kmin1为最小制动扭矩上升率,本文取值为1 200 N·m/s;f1为制动扭矩上升率系数,本文取值5。
4)电机目标扭矩为负(制动扭矩),且驾驶员需求扭矩为正(驱动扭矩)。驾驶意图为从制动工况切换到驱动工况,扭矩上升率为制动转驱动扭矩上升率。设置一个齿轮啮合区间[-Tm1,Tm1],当电机目标扭矩TT<-Tm1时,处于卸载制动扭矩阶段,扭矩上升率跟制动扭矩上升率保持一致,迅速卸载制动扭矩;当电机目标扭矩TT∈[-Tm1,Tm1]时,设置较小的扭矩上升率使齿轮缓慢啮合,减小齿轮冲击和噪声;当电机目标扭矩TT>Tm1时,处于增大驱动扭矩阶段,扭矩上升率跟踏板驱动扭矩上升率保持一致,迅速增大驱动扭矩。
式中:Tm1为减速器齿轮驱动转制动啮合扭矩,表示啮合面即将发生变化,本文取值80 N·m;Cm1为制动转驱动工况齿轮啮合扭矩上升率常数,本文取值240 N·m/s。
1.3 扭矩下降率限制
当驾驶员需求扭矩小于电机目标扭矩时,表明有减小车辆驱动扭矩或加大车辆制动扭矩的意图,为保证扭矩平滑变化,需要限制扭矩下降率。具体分析过程跟扭矩上升率限制类似:
1) 蠕行驱动扭矩下降率:
KF=CC2
式中:KF为扭矩下降率;CC2为蠕行扭矩下降率常数,本文取值为500 N·m/s。
2) 踏板驱动扭矩下降率根据扭矩差值和电机转速二维查表得出,具体数值见表2。
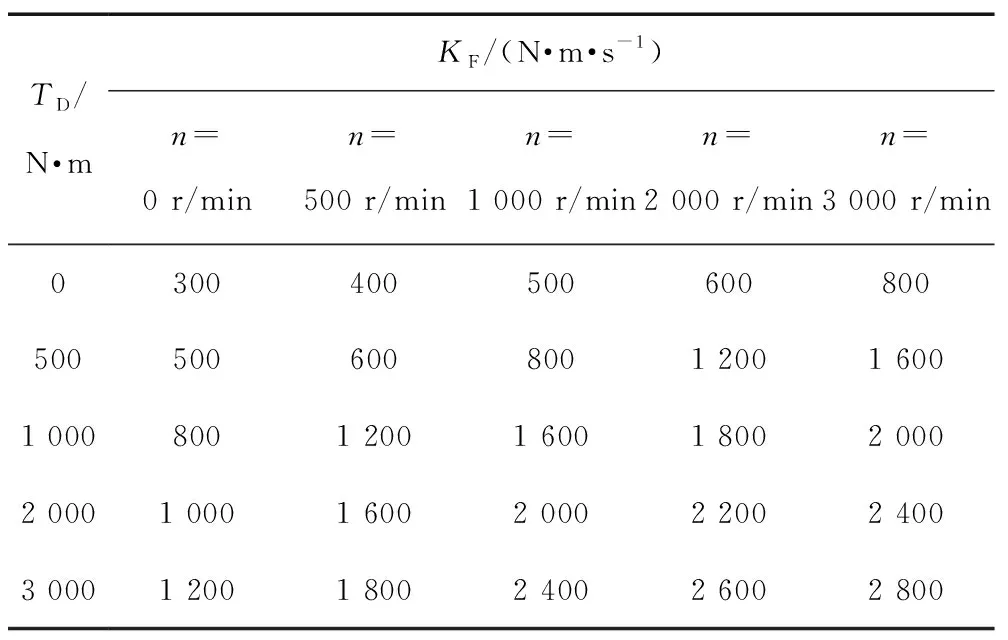
表2 踏板制动扭矩下降率
KF=f(TD,n)
3) 制动扭矩下降率:
KF=max(Kmin2,f2·TD)
式中:Kmin2为最小制动扭矩下降率,本文取值为800 N·m/s。
4) 驱动转制动扭矩下降率:
式中:f2为制动扭矩下降率系数,本文取值4;Tm2为减速器齿轮制动转驱动啮合扭矩,本文取值80 N·m;Cm2为驱动转制动工况齿轮啮合扭矩下降率常数,本文取值240 N·m/s;[-Tm2,Tm2]为驱动转制动工况齿轮啮合区间。
1.4 扭矩过零处理
经过扭矩上升率限制、扭矩下降率限制处理后,存在由负扭矩直接切换到正扭矩、由正扭矩直接切换到负扭矩的情形。驱动扭矩、制动扭矩如果不经处理直接切换,会对减速器产生较大的齿轮冲击,从而影响舒适性。为此,本文设计了一种扭矩过零处理方法:检测到由负扭矩切换到正扭矩、由正扭矩切换到负扭矩的情形时,输出最终滤波扭矩为0,确保驱动、制动工况相互切换时短暂地输出40 ms零扭矩,以减小齿轮冲击。
2 实车测试
为验证上述扭矩滤波方法的实际效果,选取一辆10 m纯电动客车测试驱动、制动、制动转驱动、驱动转制动等工况下经过扭矩滤波后的电机目标扭矩情况。
1) 驱动、驱动转制动工况测试结果如图2所示。踩加速踏板起步行驶,经过扭矩滤波处理后的电机目标扭矩平稳上升,确保车辆平稳运行;随后踩制动踏板制动,对应的原始扭矩由正到负,经过扭矩滤波处理后,电机目标扭矩经历驱动扭矩平稳下降、齿轮啮合驱动扭矩缓慢下降、扭矩过零、齿轮啮合制动扭矩缓慢上升、制动扭矩平稳上升5个阶段,有效降低了减速器齿轮冲击和噪声。
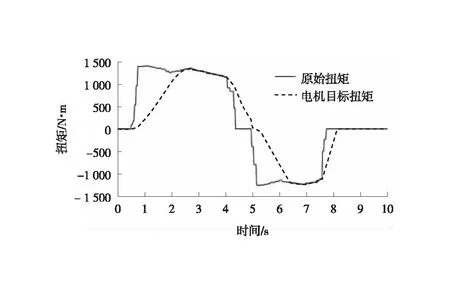
图2 驱动转制动工况扭矩曲线
2) 制动、制动转驱动工况测试结果如图3所示。行驶过程中踩制动踏板制动,对应的原始扭矩瞬间达到一个较大的负值,经过扭矩滤波处理后电机目标扭矩平稳下降至目标值;随后踩加速踏板驱动,对应的原始扭矩由负到正,经过扭矩滤波处理后,电机目标扭矩经历制动扭矩平稳下降、齿轮啮合制动扭矩缓慢下降、扭矩过零、齿轮啮合驱动扭矩缓慢上升、驱动扭矩平稳上升5个阶段,有效降低了减速器齿轮冲击和噪声。
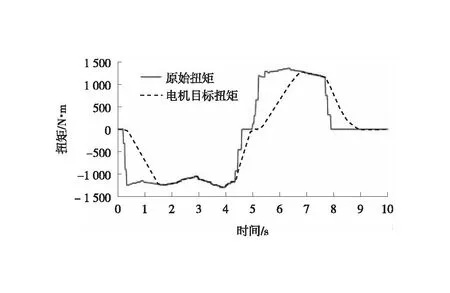
图3 制动转驱动工况扭矩曲线
3 结束语
本文提出了一种扭矩滤波控制方法,不仅可以快速响应驾驶员扭矩请求,而且在车辆驱动工况与制动工况相互切换时,通过降低扭矩上升率和下降率、扭矩过零处理,确保了扭矩平稳变化,可以有效降低减速器齿轮间隙带来的打齿冲击和噪声,从而提高了驾驶舒适性。