基于串联长短时记忆网络的振动台子结构试验模拟
2023-12-18王玉梅纪金豹王东岳
王玉梅, 纪金豹, 王东岳
(北京工业大学 工程抗震与结构诊治北京市重点实验室,北京 100124)
通过地震模拟振动台对结构施加地震作用,可以直观高效的得到结构的地震响应和破坏现象。然而因为现有振动台的尺寸和承载力限制,对于大型复杂结构只能进行缩尺试验,比例过小时难以与真实结构在地震作用下的响应相一致[1]。振动台子结构试验将振动台试验与数值分析相结合,扩展振动台的功能,降低试验费用,提高了试验精度,具有广阔的发展前景。振动台子结构试验主要围绕应用对象、拆分理论、人工边界协调、加载装置、实时数值求解、实时模型修正、实时闭环控制、时滞补偿、系统稳定性分析、试验平台建设等方面展开研究。
振动台子结构试验的实时加载对数值积分算法的稳定性和效率提出了更高的要求。Wu等[2-3]通过基于预测位移的方式分别对OS方法[4]和Chang方法[5]进行修正以用于实时子结构试验。Wang等[6]对传统的HHT-α积分算法进行了改进,将结构初始刚度作为重要参数,将隐式积分转变为无条件稳定的显式积分算法。在边界协调方面,陈再现等[7]利用OpenSEES对一钢框架结构考虑界面倾覆力矩和不考虑界面倾覆力矩的两种情况进行数值模拟,并提出基于反弯点位置的界面模拟方法。李振宝等[8]对常用的4种界面力获取方法进行了分析对比,并指出了各自的适用条件。王向英等[9]采用力控制方法开展了振动台子结构试验,验证了振动台子结构试验的可行性。纪金豹等[10]以主动质量驱动器(active mass damper,AMD)为加载装置,以多参量控制为基本控制算法,对一个五层框架结构的振动台子结构试验进行了可行性研究。时滞是影响振动台子结构试验成败的另一关键因素。Wu等[11]采用最大时滞对位移进行补偿,并通过最优过程求出期望位移。王贞等[12]采用带遗忘因子的递推最小二乘算法来进行参数估计,从而完成对实时混合试验的自适应时滞补偿。李宁等[13]将实时子结构试验中的时滞划分为空载定时滞和负载变时滞两部分,通过逆补偿对负载时滞进行补偿并通过多项式外插对空载时滞进行补偿。
近年来人工神经网络得到了快速的发展,在计算机视觉、语音处理等领域取得了巨大的成就[14-17],其应用范围也在不断进行扩展。Zhang等[18]提出PhyCNN神经网络来预测结构地震响应。许泽坤等[19]采用LSTM网络并结合滑动窗口进行递推计算,对非线性结构的地震响应进行了预测。Xu等[20]对进行非线性结构地震响应预测时LSTM网络的超参数影响进行了讨论。同时越来越多的学者开始探索人工神经网络在混合试验的领域的应用。涂建维等[21]将BP神经网络运用到实时子结构试验中,利用神经网络的延迟预测对电液伺服作动器加载的滞后时间进行补偿。王涛等[22]提出了一种在线学习的神经网络算法,该算法仅利用当前步骤下的系统输入和观测样本便可完成对数值子结构恢复力的预测。王燕华等[23]利用LM-BP神经网络对一个双自由度的结构进行模型更新,并利用遗忘因子来提高网络的自适应性。王涛等[24]通过在BP神经网络上增加一个反馈层来提高数值子结构网络的预测精度和自适应性。Bas等[25]将LSTM运用到实时混合试验中,以一单自由度的线弹性结构对所提出的方法进行了试验验证。
为了提升振动台的控制能力和试验技术水平,通过多个人工神经网络的交互形成智能化振动台控制与实时子结构试验仿真试验系统,可以为国内高性能振动台的研制提供理论和技术支持。以搭建子结构神经网络为着手点,将两个LSTM网络引入到振动台子结构试验中,利用LSTM网络代替传统的数值积分算法进行结构地震响应预测,并在试验子结构模拟时考虑了系统时滞的影响,将训练好的数值子结构神经网络和试验子结构神经网络串联,模拟实际试验中两个子结构的数据交互。选用一个五层框架结构对所提出的方法进行验证,验证了LSTM深度神经网络在振动台子结构试验中的预测精度、稳定性和时滞补偿能力。
1 振动台子结构试验原理
1.1 振动台子结构试验的实施
振动台子结构试验通常将待测结构划分为两部分,其中力学行为相对简单、可以准确数值求解的部分通过软件进行数值模拟,结构力学行为复杂的部分作为试验子结构,将试验子结构放到振动台上进行试验,通过在两个子结构之间不断进行数据交互从而完成对结构整体反应的试验分析,如图1所示。
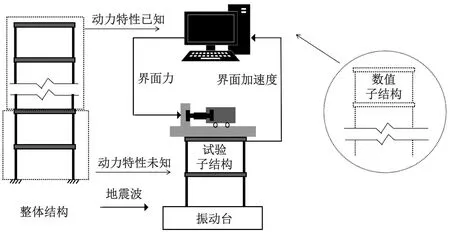
图1 地震模拟振动台子结构试验原理
以n层框架结构为例,将其简化为层间剪切模型,该种结构破坏主要集中在底层,故将1~i层划分为试验子结构,将i+1~n层划分为数值子结构。
本例中数值子结构对试验子结构的界面力作用由AMD加载装置实现。试验流程如图2所示。具体操作步骤如下:

图2 振动台子结构试验仿真流程图
(1) 将选定的地震波按照一定的时间间隔离散化;
(2) 试验过程中的数据交互存在先后问题,在这里将数值子结构传递给试验子结构的第一个界面力假设为0,同时输入地震波的第一个数据点给试验子结构,进而获得这组数据点下的试验子结构顶部的界面加速度响应;
(3) 将测得的试验子结构顶部的界面加速度响应传递给数值子结构进行数值求解,获得界面力指令给AMD装置;
(4) AMD装置获得指令后推动惯性质量,产生反作用力从而对试验子结构施加界面力,同时振动台输入下一时刻的地震波,获得试验子结构顶部的界面加速度响应;
(5) 重复步骤(3)、步骤(4),直至地震波全部输入完毕。
1.2 振动台子结构的试验仿真流程
对振动台子结构试验过程进行仿真,将加载装置进行理想化处理,只针对数值子结构和试验子结构部分进行仿真,并按照试验流程进行数据交互。
2 神经网络的选取与构建
2.1 神经网络的选取
LSTM是循环神经网络(recurrent neural network, RNN)的一种变体。当序列较长时,由于梯度的不断循环累计,RNN会出现梯度弥散或梯度爆炸现象[26]。LSTM在RNN的基础上增加了输入门、遗忘门和输出门三个门控单元。其中输入门决定网络的输入有多少可以保存到单元状态Ct,遗忘门决定了上一时刻的单元状态Ct-1有多少保留到当前时刻Ct,输出门决定控制单元状态Ct有多少输出到 LSTM 的当前输出值ht。
LSTM不仅完成了外部信息的循环,在细胞内部也完成了自循环,LSTM对于序列内部信息之间的关系可以进行更好的挖掘。在振动台子结构试验中,数据以时间序列形式呈现。根据传统积分算法,子结构当前时刻输出不仅与当前输入有关,还与过去的信息相关,因此理论上LSTM可以很好适用于振动台子结构模型的构建。LSTM网络节点原理如图3所示。

(a) RNN网络结构图
2.2 子结构神经网络的构建
2.2.1 子结构神经网络的离线训练
忽略试验加载系统特性等因素的影响,利用模块化的神经网络实现振动台子结构试验的神经网络模拟,简化子结构试验系统为两个子结构模型并分别进行离线训练,网络训练流程如图4所示。

图4 子结构网络离线训练流程图
网络层数过少可能会产生预测精度不足的情况,网络层数增加意味着网络学习能力增强,但也可能导致训练过程难以收敛。网络节点数对网络性能的影响需进行测试以便找到最佳的节点数范围。网络输入数据来源于整体结构的有限元分析结果,同样以有限元分析结果作为网络训练目标。由于多输入网络相对单输入网络具有更好的稳定性,在数值子结构网络中引入地震波数作为辅助输入。将数据集划分为训练集和测试集两部分,为统一评价标准,参考文献[25],地震波持时设定为30 s,加速度峰值0.2g,采样时间设为0.02 s。输入的形式上对输入数据进行向量化处理。选择均方误差MSE作为损失函数,该函数的梯度随着函数值的减小而减小,有利于模型的收敛,MSE公式如下
(1)

选用Adam优化器,Adam可以迅速锁定极小值区域,具有较高的计算效率。动态学习率的设置可节约训练时间,进行预训练时对训练进程进行监督,当损失函数值反复振荡不下降时采用小一量级的学习率。为方便对训练进程进行调整,每次训练都采用固定的随机生成的初始化参数,在该初始化参数经反复调整仍不能得到好的训练结果时再进行更换。
2.2.2 子结构神经网络的在线交互
离线训练的输入数据是从整体结构模型的有限元分析获得的,但是实际试验中数据是通过不断交互形成的,因此除离线测试外还需将离线训练的网络进行串联,模拟真实振动台子结构训练的数据交互过程以查看数值子结构神经网络的预测精度和稳定性。这要求LSTM网络在逐点输入时仍能保留之前数据点的信息。为了保证LSTM网络的实时性和对过去信息的记忆,网络的输入在原有的基础上增加了变量Ct和ht,以试验子结构模型为例,在离线训练时的输入是界面力和地震波,那么应用到振动台试验中输入就是界面力、地震波和Ct、ht四种输入,这样不仅能够利用之前离线训练的结果,还可以使LSTM网络适应振动台子结构试验数据不断交换的应用场景。子结构网络在线交互流程,如图5所示。
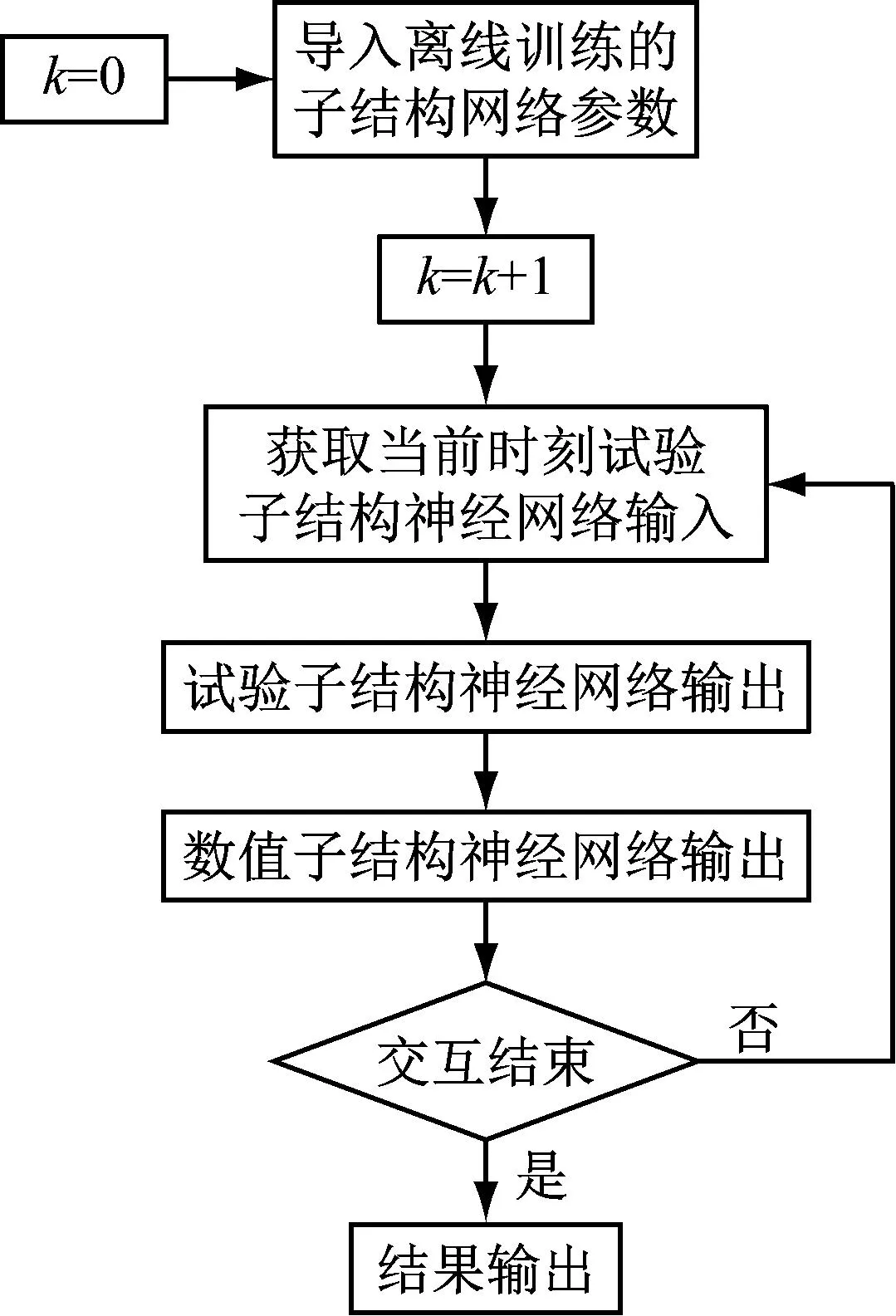
图5 子结构网络在线交互流程图
2.2.3 子结构神经网络的时滞补偿
在试验子结构神经网络中,通过设置数据点延迟输出固定步长的方式来模拟试验中的时滞,为使数值子结构神经网络具有时滞补偿能力,对其重新加以训练,训练数据的输入部分改为带有时滞的延迟输入,使得训练后的数值子结构神经网络在时滞存在时仍能正常输出从而实现时滞补偿。重复2.2.1与2.2.2步骤,检验数值子结构神经网络的时滞补偿能力。
3 算例验证
3.1 结构选型
选择文献[27]中的5层剪切型框架模型进行数值仿真,结构首层的层刚度取1 200 kN/m,其余各层的层刚度取544 kN/m,1~4层集中质量取635 kg,顶层的质量取481 kg。取上部三层为数值子结构,下部两层为试验子结构。通过计算得到整体结构的自振频率如表1所示。

表1 整体模型结构的自振频率
3.2 LSTM网络参数设置及训练
网络模型参数设置如表2所示。
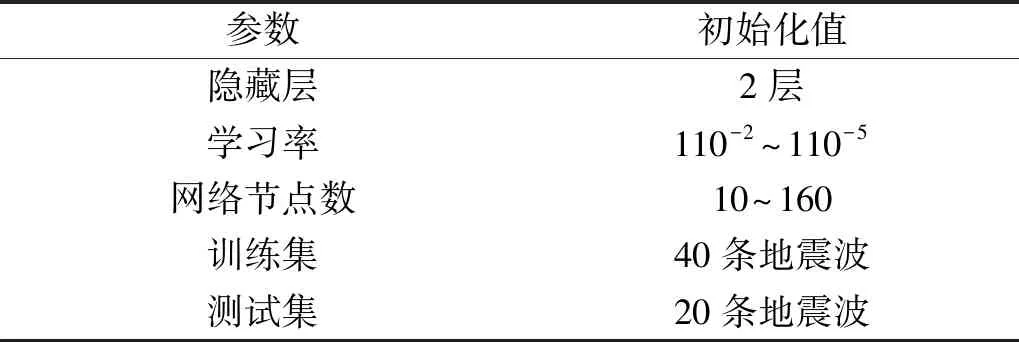
表2 模型参数设置
每个学习率下迭代次数为100~350次,累计迭代次数为600~1 500次。
4 结果分析
用测试集数据对子结构网络进行测试,对比数值子结构神经网络输出的界面力、试验子结构神经网络输出的界面加速度与整体结果的差异。用波形相关系数和峰值误差两个参数对波形进行评价,相关系数r和峰值误差E的公式如式(2)和式(3)
(2)

(3)
式中,|x|max和|y|max分别为真实值和预测值绝对值的最大值。
对不同网络参数下的子结构预测结果进行对比,对比结果显示,所选择的不同节点下的网络在合理的训练后均可以取得较高的预测精度,以节点数为(50,50)的子结构网络为例,数值子结构神经网络测试集平均相关系数为99.99%,最小相关系数99.99%,平均峰值误差为0.31%,最大峰值误差2.70%。测试集中一条波预测结果如图6和图7所示。

图6 数值子结构界面力曲线图

图7 试验子结构界面加速度曲线图
对子结构进行交互以模拟真实试验过程,由于网络是离线训练的,在进行在线交互模拟时,将60条地震波数据全部作为测试集,结果如图8和图9所示。当网络节点数为40~90时,子结构深度神经网络在交互过程中仍能保持稳定和较高的预测精度,图9为网络节点数为50时,模拟真实地震作用时网络交互下时的子结构预测效果图,如图10和图11所示。当网络节点数为10~30时,个别地震波会出现预测精度不足的情况,这是由于网络节点数太少,网络交互过程中误差不断累计;当节点数在100~160之间时,网络会随着节点数的增高出现不稳定的情况,网络节点数的提高会导致过拟合现象,即使达到一定的精度,训练过程也相对困难。对网络节点数为(50,50)时的数值子结构深度神经网络计算耗时进行了统计,当采用带RTX3090 GPU显卡的计算机进行反复测试,平均单步计算耗时约为0.4 ms,最大单步计算耗时0.42 ms,完全可满足振动台子结构试验对于求解速率的要求。
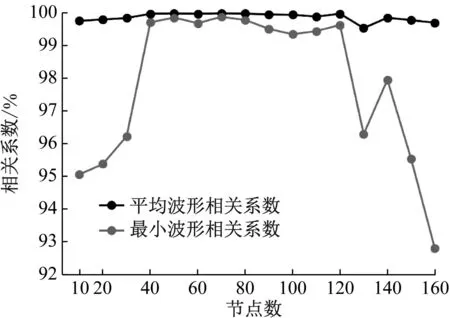
图8 不同节点波形相关系数对比图
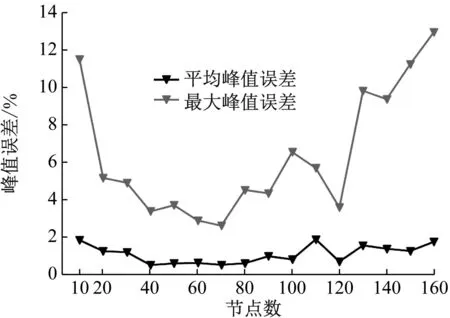
图9 不同节点峰值误差对比图

图10 模拟真实试验时子结构预测效果图

图11 局部放大图
选用节点数为(50,50)的子结构网络,结合作动器加载性能和现有时滞补偿器的补偿能力[28-31],将0.06 s的时滞引入到试验子结构中,对数值子结构神经网络进行时滞补偿训练,对比进行时滞补偿和未加时滞补偿的交互结果,如图12所示。结果显示,通过合理的训练,数值子结构具有较好的时滞补偿效果,测试集平均波形相关系数99.96%,最小波形相关系数99.47%,平均峰值误差0.67%,最大峰值误差5.67%。
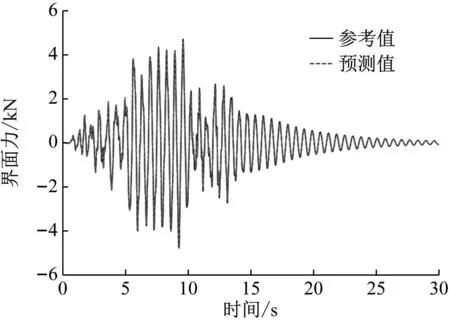
图12 时滞补偿效果图
5 结 论
将LSTM神经网络引用到振动台子结构试验中,构建了串联LSTM的地震模拟振动台子结构试验神经网络。采用一个五层框架结构对所提出的方法进行验证,主要结论如下:
(1) LSTM网络对振动台子结构的界面力和界面力响应可以进行较高精度的预测。
(2) 对两个网络进行串联模拟真实振动台子结构进程时,网络节点范围为40~90,各网络能进行较高精度的预测,并且展现了较好的稳定性,当网络节点数过高或过低会出现预测精度不足或训练困难的情况。
(3) 对网络计算效率进行统计,单步计算用时可以满足振动台子结构试验对计算效率的要求。
(4) 将0.06 s的时滞引入到试验子结构后,数值子结构通过训练能够对时滞进行补偿,并且保持预测精度和稳定性。
本文仅针对LSTM网络在振动台子结构试验中的应用及其性能进行了初步探索,在今后的工作中将利用深度神经网络对考虑结构非线性、复杂数值子结构模型和加载装置动力特性影响等因素做进一步分析和研究。
