冲击测试动响应高速视觉测量方法
2023-12-14南京宏
陈 鹏,高 仪,林 宏,南京宏,张 群
(1.同济大学测绘与地理信息学院,上海 200092;2. 北京宇航系统工程研究所,北京 100076;3.同济大学土木工程防灾减灾国家重点实验室,上海 200092)
0 引言
冲击环境是火箭、卫星等空间飞行器所要面临的严酷力学环境,具有量级高、破坏性强等特点,往往会导致箭/星上重要精密电子设备的损坏。为了保障航天器产品在冲击状态下能正常工作,需要开展测试实验研究冲击响应的传递特性,及产品环境适应性[1-4]。在这类测试任务中,如何获取测试目标在冲击环境下的动态响应参数是一项关键的内容。
传统采用接触式传感器来获取冲击动态响应参数[5-8]。振动参数测量系统是其中的典型代表,主要由振动参数测量仪和若干加速度计组成的一个传感器网络。为了获取要测量的振动力学参数信号,需要将传感器附着布设于测量对象的各个测量位置。这种布设方式增加了测试对象的系统体积和质量,而且在复杂振动环境中对微振动测量系统的故障容错能力要求较高。总体而言,接触式传感器存在量程有限、测量区域小、测点间基准不一致、安装费时费力、增加模型质量、单一维度监测、难以适应复杂测试环境等限制。
近年来,以高速摄影测量为代表的非接触式测量方法得到极大的发展[9],开始拓展到传统接触式传感器的应用领域。该方法以影像形式详细记录高速运动物体的变化状态,然后利用摄影测量方法计算出测量目标的三维空间坐标,进而获得测量对象的位移、速度和形变等参数,分析试验过程中关键参数的时空动态变化特征,实现对测试目标快速乃至实时的密集测量。
高速视频测量技术具有非接触式、高精度、高频率、不伤及测量对象、三维监测等优点,已广泛应用于工程测试领域的各类实验中,包括工厂现场振动和运动分析,汽车工业测试(汽车碰撞试验、安全气囊测试和燃烧测试),材料测试(滴落测试、爆炸和断裂及变形测试)和高速观测等方面。
在冲击测试中,冲击载荷产生了高频值的振荡波形,持续时间很短,与此相对应的微振动在高速影像序列中位移小、不易识别,目前尚无采用高速视觉测量方法来获取动态响应参数的研究成果。
本文针对冲击测试中的动响应参数测量需求,提出了一种将数字图像方法与高速视觉测量系统相结合的测量方法,设计了动响应高速视频测量方案,并在空气炮冲击试验中获取了测试目标在微小时间间隔中的三维形态变化,提供了一种新的冲击动响应参数分析方法。
1 冲击响应高速视觉测量方法
针对冲击测试中的动响应参数测量需求,本文提出了一种冲击动响应高速视觉测量方法,如图1所示,该方法包含3部分内容。
1)构建双目高速视觉测量系统网络,并在标定之后以同步摄影方式获取测试过程中的影像数据。
2)通过对采集到的散斑影像数据进行处理,计算测量目标在冲击测试过程中的三维坐标时序,具体包括散斑影像预处理(选取参考影像、提取兴趣区和确定目标点位等)、测量目标双匹配(左右影像匹配和序列影像匹配)和三维点云重建。
3)利用获得的测量目标三维坐标时序数据解算冲击测试中的动响应参数。
1.1 高速视觉测量系统网络构建与标定
(1)高速视觉测量系统网络构建
针对冲击测试工程应用的需求,综合考虑模型尺寸、实验环境、监测任务等因素,搭建合适的视频测量网络。在视频测量网络中,高速相机一般采用交向摄影方式以增加影像重叠区域。为了保证测量精度,交向角一般设为90°左右。在测量方案测试阶段,可以通过透镜成像公式大致推算出相机的布设位置,此后根据目标实际场景,调整相机角度直至所拍影像包含整个测量对象模型。
在确定相机的摆放位置和交向角后,需计算出相机视场的重合区域。然后根据控制点的布设条件,在重合区域均匀布置一定数量的控制点。通过在被测物的周围设立控制点所形成的控制网来建立一个局部空间坐标系,以此建立摄影测量中的物方坐标系,为解算目标点在该坐标系下的空间坐标提供基础。
(2)高速相机的立体标定
高速相机立体标定的目的是获取相机内方位参数、镜头畸变参数以及外方位参数。在此采用基于模型平面的张正友标定方法,首先拍摄不同角度的平面模板,然后从获得的平面模板图像中提取棋盘格角点的影像坐标,由于角点的影像坐标和角点的世界坐标系坐标之间存在映射关系,利用该映射关系即可计算出相机的内参和畸变参数。
本文采取的算法从Tsai两步法发展而来,首先通过一个线性解法求出部分参数的初始值,然后考虑径向畸变一阶和二阶对线性结果进行非线性优化,最后利用计算得到的内部参数和平面模板映射矩阵求出外部参数。
1.2 测量目标的三维坐标解析
通过对采集到的散斑影像数据进行处理,可以获得测量目标在测试过程中的三维坐标时序,核心工作包括左右影像上的同名点匹配、时序影像上的目标跟踪匹配和三维坐标重建。
(1)同名点匹配
同名点匹配是在左右相机影像中定位同一目标点,以便后续求解目标点的三维空间坐标。本文使用了一种由粗到精的匹配策略。
粗匹配通过计算归一化相关系数来确定整像素匹配粗略点位。在此使用了零均值归一化互相关(Zero-mean Normalised Cross-Correlation,ZNCC)函数,该相关函数对影像块的灰度偏移问题和尺度变化问题均不敏感,其计算公式如下
ZNCC(f,g)=
(1)

精匹配则使用了最小二乘匹配(Least Squares Matching,LSM)算法。该算法充分考虑了影像块之间的几何失真,其匹配精度可达0.01~0.1像素。为了加快匹配速度,算法中会确定一个局部搜索区域。如图2所示,可先确定左影像某一目标点在左兴趣区(宽la,高lb)中的相对位置(x,y),然后再推算出该同名点在右兴趣区(宽lc,高ld)中大致的位置(x′,y′),由此来决定影像匹配搜索区域。
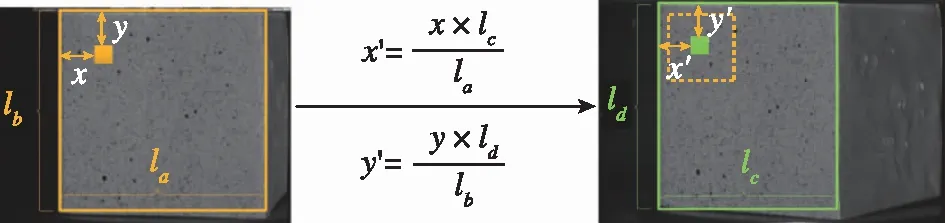
图2 同名点匹配Fig.2 Homonymous point matching
(2)目标跟踪匹配
序列影像目标跟踪匹配是为了获得各目标点序列影像坐标,其亚像素级匹配方法与同名点匹配相似。不同之处在于匹配对象不再是左右影像,而是各相机存储的序列影像。由于同名点匹配过程已经提供了目标影像块,因此这些影像块也应该在目标跟踪匹配中作为目标影像,而下一帧的搜索区域可由上一帧的目标位置所确定,其跟踪匹配过程如图3所示。

图3 序列影像中目标点的跟踪匹配Fig.3 Tracking and matching target points in sequence images
通过上述流程,对于每一个待量测的目标点都可获得其在序列影像上的坐标;然后通过三维坐标重建,即可获得测量对象表面在实验过程中任意时刻的三维点云数据。
(3)三维坐标重建
此前已通过相机标定确定了各相机的内外方位元素,因此在两台相机采集的序列影像中,每获得一对同名点的像点坐标,便可通过基于共线方程的前方交会解算其三维点位。通过空间和时间上的累积,从而获得实验过程中完整的点云数据。近景摄影测量的共线条件方程公式如下
(2)
式中,(Xp,Yp,Zp)表示目标点物方坐标,(x,y)表示目标点像平面坐标,(Xs,Ys,Zs)表示相机的外方位参数,(Δx,Δy)表示相机的畸变参数,(fx,fy)表示相机的像距,ai,bi,ci(i∈[1,3])是由角元素组成的旋转矩阵。
对于一对同名点,可以建立4个线性方程式来求解3个未知数。在此计算过程中,可以通过线性最小二乘法直接计算三维重建中的最终坐标结果。作为最基本的结构动力学参数,后续可通过对坐标序列的差分来获得全场目标点的三维位移。
1.3 冲击响应参数解析
冲击响应谱是目前国内外航天领域普遍采用的一种冲击环境严酷度评价指标[6],针对被施加了冲击激励的一系列线性单自由度弹簧质量系统,以系统固有频率为横坐标,以对应于固有频率的最大响应值为纵坐标绘制而成一条响应曲线。
在此,可以通过对位移数据的一次差分和二次差分计算得到冲击测试过程中测量目标的速度和加速度,然后利用获得的加速度数据即可计算冲击试验中测量对象的动态响应参数,获取其冲击响应谱。

(3)
定义质量块相对于基座的相对位移z=x-y,则由式(3)可得
(4)
无阻尼固有频率
(5)
式中,ωn是以rad/s为单位的固有频率。
系统阻尼比(本实验中设定为5%)
(6)
ξ通常用放大系数Q表示,Q=1/(2ξ)被称为品质因数。将式(5)和(6)代入式(4)可得相对响应的运动方程
(7)
2 空气炮冲击试验
2.1 空气炮冲击试验场景
为了验证本文所提出高速视觉测量方法的有效性,在试验室环境内搭建了一个空气炮冲击测试场景,如图4所示。

图4 空气炮冲击试验测量场景Fig.4 Measurement scenario of air gun impact test
待测试对象为一T形板,如图4中所示,将其安置于空气炮冲击试验台上,并用螺栓与冲击试验台相连。弹丸从空气炮冲击试验台下方发射,在击打试验台台面后令测试对象产生高频微振动。试验过程中利用高速相机记录物体表面变形前后的散斑图,通过对比目标表面子区间在变形前后的散斑图,计算得到测试对象的动态响应参数。同时在测试对象上布设了加速度计等电测传感器(加速度传感器以螺柱形式布设在T形板的右上角处,即图4所标识的位置),利用其测量数据计算获得冲击响应曲线,将该结果作为与高速视频摄影测量结果比对的参考数据。
2.2 高速视觉测量方案
(1)高速视觉测量网络构建
考虑到试验中需要测量的范围约为30 cm×30 cm,对于小范围立体观测,采用两台工业相机构成一个双目系统,以会聚拍摄的形式记录目标对象的整个形变过程。同时配置影像采集卡、磁盘阵列、同步控制器等设备形成一个高速视频测量网络,其中影像采集卡和磁盘阵列用于帮助工业相机实时存储影像序列,而同步控制器的作用是使联测相机能够同时采集影像序列。
考虑到本试验中冲击响应持续时间为10~20 ms,且引起的振动(<0.1 mm)较小,预估冲击响应的拐点频率不超过4 000 Hz。为了精细地监测试件的变形,根据奈奎斯特采样定理,相机采集帧频应优于8 000 Hz,为此选择了表1所列高速相机,并在试验过程中通过开窗操作将相机的采集帧频调至9 000 Hz,开窗之后高速相机所拍影像大小为320×320像素。
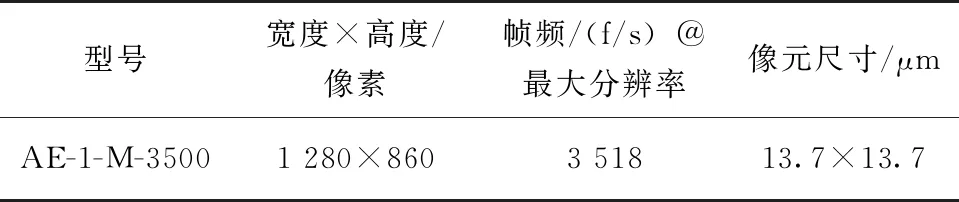
表1 高速相机参数
(2)相机与控制网络布设
高速相机的安置位置应根据试验现场环境来布设,充分考虑标志位置、相机视场大小、现场光照强度。在现场布设中,每两台高速相机成交向摄影测量方式,同时后方的LED补光灯对试验对象进行补光,保证影像的拍摄质量,然后利用主控电脑控制立体相机同步拍摄影像序列。
针对本次试验视场较小的特点,采用了基于平面标定板的张正有标定算法进行立体标定来建立相机间的相对定向关系。
(3)散斑标志设计
在测量对象表面上制作散斑图案,通过增加纹理信息来提高后续影像的匹配精度。为此设计了散斑模具以生成适当的散斑图案,通过随机大小的椭圆形成各类散斑点。本次试验的散斑点大小控制在3~5个像素之间,具体如图5所示。

图5 测试对象表面的散斑与标志点Fig.5 Speckle patterns on the surface of the test object
3 冲击响应试验结果分析
在工况1(GK1)和工况2(GK2)的试验中使用了1.5 kg的炮弹进行打击,试验给定的冲击度随着工况序号的增加而增大,预估其冲击响应拐点频率在2 000 Hz附近。在工况3(GK3)和工况4(GK4)的试验中使用了6 kg的炮弹进行打击,冲击度同样逐渐增大,预估的冲击响应拐点频率在1 200 Hz 附近,设计的试验参数如表2所列。
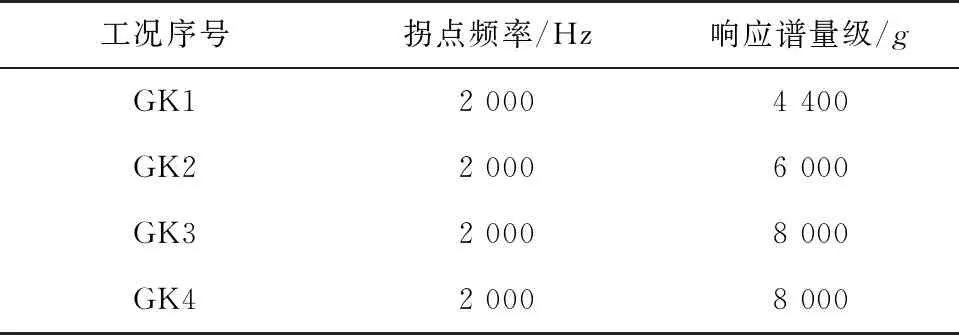
表2 空气炮冲击测试工况
3.1 三维重建结果及其精度
三维重建所获取的测试对象微振动位移是后续解析冲击响应谱的基础。以GK1试验为例,试件上4个圆形标志点(T1-T4)的相对位移测量结果如图6所示,该曲线呈现出周期性衰减趋势,符合冲击响应的运动规律。

图6 GK1试验中测量目标的位移测量结果Fig.6 Displacement measurement results of targets in experiments GK1
为了进一步分析三维重建精度,选择一张标定影像建立世界坐标系,以其X方向为竖直方向,Y方向为水平方向,Z方向垂直于XY平面。统计标定影像上标定板方格间距,其平均重投影误差为0.08像素,考虑到试验中高速影像的空间分辨率约为1 mm/像素,则X,Y,Z3个方向的定位精度分别为0.07,0.06,0.09 mm,具体结果见表3。

表3 三维重建精度
3.2 冲击响应谱曲线和比对参数识别精度
以试验工况1(GK1)为例,在板上选择均匀分布的5个位置,见图7(a),分别绘制该处的冲击响应谱曲线,如图7(b)所示。图7(a)中P1~P5的5条曲线几乎完全重合,表明在本次试验中整块均匀材质的T形板,其板面各处位置的动响应参数不存在差异。

(a)测试对象标志点
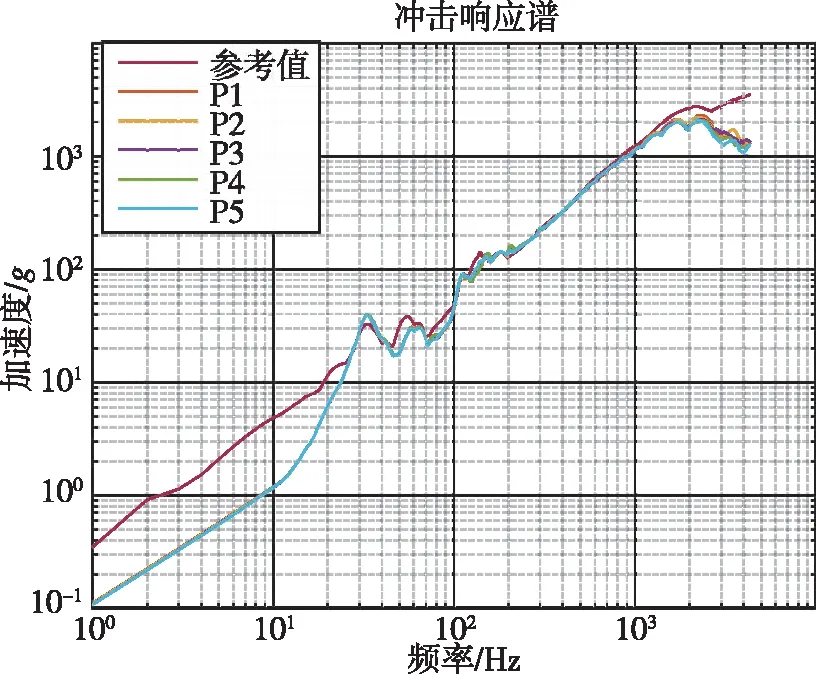
(b)冲击响应谱曲线
考虑到试件上圆形标志点T2(见图5中的标识)的位置距离布设的加速度传感器最近,因此选择分析计算该位置的各项动态响应参数,与加速度计的结果进行对比。
圆形标志点T2位置处的冲击响应谱曲线如图8所示,图中冲击响应谱曲线(红色曲线)与加速度计(蓝色曲线)的量测结果一致,从曲线上识别出的拐点频率分别为2 405和2 191,拐点处G值分别为2 694和2 577,相对偏差优于10%。

图8 GK1试验中的冲击响应谱曲线Fig.8 Impact response curve in the experiments GK1
试验中4次工况的统计结果如表4所列,利用高速视觉测量方法获得结果与利用加速度计得到的结果相符。绘制其冲击响应谱曲线如图9所示,4条曲线依次上升,这与试验过程中设置的冲击度依次增加也是一致的,表明高速视觉测量方法在航天器冲击测试中具有良好的应用潜力。

图9 4次工况试验中的冲击响应谱曲线Fig.9 Impact response curves in the experiments GK1~GK4

表4 冲击响应测量结果对比
4 结束语
针对冲击测试中的动响应参数测量需求,本文提出了一种用于获取冲击测试动响应的高速视觉测量方法,利用双目视觉原理获取测试对象的三维运动轨迹,并在此基础上解析测试过程中的冲击动态响应参数。
本文利用空气炮冲击测试验证了所提出的高速视觉测量方法的效能。试验中通过立体标定解算了相机的内外方位元素,其平均反投影误差小于0.1像素,单一维度方向上的定位精度优于0.07 mm,圆形目标点三维重建的结果符合冲击振动过程中周期性衰减的运动规律。获取的冲击响应谱曲线与加速度计的量测结果一致,拐点频率等比对参数识别结果的相对偏差优于10%,说明高速视觉测量方法能很好地获取冲击测试中的冲击响应谱、拐点频率等动态响应参数。
在现代航天器上搭载的航天设备,其集成度不断提高,成本也在不断下降。在此背景下,航天产品能否适应严酷的冲击环境是制约我国航天器控制成本、提升总体性能的关键因素之一。考虑到高速视觉测量技术所具有的非接触式、高精度、高频率、不伤及测量对象、三维监测等优点,该方法未来在航天器冲击测试中具有良好的应用潜力。
